You might also like
- Predicting Temperature Rise of Ferrite Cored TransformersDocument5 pagesPredicting Temperature Rise of Ferrite Cored TransformersPhạm Văn TưởngNo ratings yet
- (TI) Frequency Response Measurements For Switching Power SuppliesDocument13 pages(TI) Frequency Response Measurements For Switching Power Suppliesdsshin_psNo ratings yet
- Implementing Field Oriented Control of A Brushless DC MotorDocument10 pagesImplementing Field Oriented Control of A Brushless DC MotorPhạm Văn TưởngNo ratings yet
- Final ThesisDocument119 pagesFinal ThesisGüven ÖnbilginNo ratings yet
- C2000 MCU Real-Time Industrial Control TrainingDocument4 pagesC2000 MCU Real-Time Industrial Control TrainingPhạm Văn TưởngNo ratings yet
- Filters and Components With Inductance CancellationDocument9 pagesFilters and Components With Inductance CancellationPhạm Văn TưởngNo ratings yet
- Control of AC-DC Matrix Converter Using Digital PLLDocument6 pagesControl of AC-DC Matrix Converter Using Digital PLLPhạm Văn TưởngNo ratings yet
- Net Ties and How To Use ThemDocument10 pagesNet Ties and How To Use ThemPhạm Văn TưởngNo ratings yet
- Practical Thermal Measurements For DC-DC Converter ModulesDocument46 pagesPractical Thermal Measurements For DC-DC Converter ModulesPhạm Văn TưởngNo ratings yet
- An Introduction To Digital Control of Switching Power ConvertersDocument9 pagesAn Introduction To Digital Control of Switching Power ConvertersPhạm Văn TưởngNo ratings yet
- Review of Current Regulation Techniques For Three-Phase PWM InvertersDocument9 pagesReview of Current Regulation Techniques For Three-Phase PWM InvertersPhạm Văn TưởngNo ratings yet
- Digital Power Helps Get Products To Market More QuicklyDocument4 pagesDigital Power Helps Get Products To Market More QuicklyPhạm Văn TưởngNo ratings yet
- Digital Control of A Single-Phase UPS Inverter For Robust AC-Voltage TrackingDocument11 pagesDigital Control of A Single-Phase UPS Inverter For Robust AC-Voltage TrackingPhạm Văn TưởngNo ratings yet
- Vector Control of Trapezoidal Back-EMF PM Machines Using Pseudo-Park TransformationDocument5 pagesVector Control of Trapezoidal Back-EMF PM Machines Using Pseudo-Park TransformationPhạm Văn TưởngNo ratings yet
- Cap-Drop Off-Line Power SupplyDocument19 pagesCap-Drop Off-Line Power SupplypushrajaNo ratings yet
- A High Ef Ciency, Soft Switching DC-DC Converter With Adaptive Current-Ripple Control For Portable ApplicationsDocument5 pagesA High Ef Ciency, Soft Switching DC-DC Converter With Adaptive Current-Ripple Control For Portable ApplicationsPhạm Văn TưởngNo ratings yet
- Snvu128 13W Isolated Flyback LED Driver With PFCDocument7 pagesSnvu128 13W Isolated Flyback LED Driver With PFCPhạm Văn TưởngNo ratings yet
- Slua609 Synchronizing Three or More UCC28950 Phase-ShiftedDocument17 pagesSlua609 Synchronizing Three or More UCC28950 Phase-ShiftedPhạm Văn TưởngNo ratings yet
- A New Approach For Torque Ripple Minimization in Brushless DC MotorDocument5 pagesA New Approach For Torque Ripple Minimization in Brushless DC MotorPhạm Văn TưởngNo ratings yet
- Snvu233LM27403EVM Evaluation ModuleDocument31 pagesSnvu233LM27403EVM Evaluation ModulePhạm Văn TưởngNo ratings yet
- Slaa518a Nine-Axis Sensor Fusion Using The Direction Cosine - BatteryDocument15 pagesSlaa518a Nine-Axis Sensor Fusion Using The Direction Cosine - BatteryPhạm Văn TưởngNo ratings yet
- Slva498 Implementing A 60-W, End-To-End PoE SystemDocument13 pagesSlva498 Implementing A 60-W, End-To-End PoE SystemPhạm Văn TưởngNo ratings yet
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDocument7 pagesSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNo ratings yet
- Techniques For Input Ripple Current CancellationDocument9 pagesTechniques For Input Ripple Current CancellationPhạm Văn TưởngNo ratings yet
- Improved Core-Loss Calculation For Magnetic Components Employed in Power Electronic SystemsDocument11 pagesImproved Core-Loss Calculation For Magnetic Components Employed in Power Electronic SystemsPhạm Văn TưởngNo ratings yet
- Bpra072 Bpra072 TI Implementation of A Sensorless Speed BLDC Motor With TMS320Document41 pagesBpra072 Bpra072 TI Implementation of A Sensorless Speed BLDC Motor With TMS320Phùng TuấnNo ratings yet
- Current Control Techniques For Three-Phase Voltage-Source PWM ConvertersDocument13 pagesCurrent Control Techniques For Three-Phase Voltage-Source PWM Convertersedvin_s667100% (1)
- Isolated DC-DC Converters With High-OutputDocument10 pagesIsolated DC-DC Converters With High-OutputPhạm Văn TưởngNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 1MRG014321 en Practical Experience With Differential Protection For Converter TransformersDocument10 pages1MRG014321 en Practical Experience With Differential Protection For Converter TransformersFrancisco MartinezNo ratings yet
- SPWM V/HZ InverterDocument51 pagesSPWM V/HZ InverterLabi BajracharyaNo ratings yet
- BD FMP A1 TZ 015 F3015P Series Pro2.0 CEDocument15 pagesBD FMP A1 TZ 015 F3015P Series Pro2.0 CEVictor PATIÑONo ratings yet
- Anam LOR PDFDocument1 pageAnam LOR PDFJewel MohajanNo ratings yet
- List of HVDC ProjectsDocument10 pagesList of HVDC ProjectsNo_PreguntesNo ratings yet
- ABB Hard To Find Information On Distribution Systems Part IIDocument27 pagesABB Hard To Find Information On Distribution Systems Part IIRafat ThongNo ratings yet
- Angle Controlled Current Regulated Rectifiers For AC/AC ConvertersDocument7 pagesAngle Controlled Current Regulated Rectifiers For AC/AC ConvertersKanomba JavaNo ratings yet
- LLC Design by Using Scaling Laws Rev12 1Document57 pagesLLC Design by Using Scaling Laws Rev12 1ed251No ratings yet
- Elex - EXPERIMENT 3 RectifierDocument7 pagesElex - EXPERIMENT 3 RectifierKzenetteNo ratings yet
- Concept VoltageDocument55 pagesConcept Voltagerajendra poudelNo ratings yet
- Instrument TransformerDocument3 pagesInstrument Transformerrenjithas2005No ratings yet
- Comparison of UPS Topologies: Line-Interactive Vs Online Vs OfflineDocument8 pagesComparison of UPS Topologies: Line-Interactive Vs Online Vs OfflineManish ShrivastavaNo ratings yet
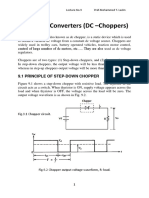
- DC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperDocument18 pagesDC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperSaif UddinNo ratings yet
- Review of Nanocomposite Dielectric Materials With High Thermal ConductivityDocument34 pagesReview of Nanocomposite Dielectric Materials With High Thermal Conductivityshameem siddiqueNo ratings yet
- Assignment - Role of Computational Techniques On Proposed ResearchDocument9 pagesAssignment - Role of Computational Techniques On Proposed ResearchSnehamoy DharNo ratings yet
- Voltage Multiplier CircuitDocument4 pagesVoltage Multiplier Circuitnobody126100% (1)
- Datasheet 579314 (59-8010-A0) en 220V 50HzDocument53 pagesDatasheet 579314 (59-8010-A0) en 220V 50HzBlue PntNo ratings yet
- PW ElecDocument5 pagesPW ElecKarajRoboNo ratings yet
- Low Cost LED Emergency LightDocument2 pagesLow Cost LED Emergency LightAmir AshrafiNo ratings yet
- Features 10N65 650V N-Channel MOSFET: TO-220F PackageDocument7 pagesFeatures 10N65 650V N-Channel MOSFET: TO-220F PackageMindSet MarcosNo ratings yet
- TCTP ReportDocument16 pagesTCTP ReportVegembogaNo ratings yet
- Lab.12 Power ElectronicsDocument2 pagesLab.12 Power ElectronicsXHaMzAXNo ratings yet
- Summer Training DMRCDocument56 pagesSummer Training DMRCdivyarai12345No ratings yet
- Industrial Electronics: Anela L. SalvadorDocument148 pagesIndustrial Electronics: Anela L. SalvadorJames SuarezNo ratings yet
- Irg 4 BC 30 KDDocument11 pagesIrg 4 BC 30 KDLucía MitchellNo ratings yet
- Switching Function Design For Output Voltage Tracking in The DC DC Buck Power ConverterDocument14 pagesSwitching Function Design For Output Voltage Tracking in The DC DC Buck Power ConverterKaritonovh MarquezNo ratings yet
- Review of Three-Phase Inverters Control For Unbalanced Load CompensationDocument14 pagesReview of Three-Phase Inverters Control For Unbalanced Load CompensationIAES IJPEDSNo ratings yet
- Power Supply SchematicDocument1 pagePower Supply SchematicAddin Official Vlog (Ayank)No ratings yet
- Digital Control of Buck Converter Using Arduino and 8051 Micro-ControllerDocument8 pagesDigital Control of Buck Converter Using Arduino and 8051 Micro-ControllerIJAR JOURNALNo ratings yet
- Shambel Dagnew 0904686 2. Shikur Worku 2202/08 3. Kassahun Marew 0903126 4. Mulatu Dessalegn 0904062 Advised By: Girma M. (MSC.)Document42 pagesShambel Dagnew 0904686 2. Shikur Worku 2202/08 3. Kassahun Marew 0903126 4. Mulatu Dessalegn 0904062 Advised By: Girma M. (MSC.)Dawit Adane KebedeNo ratings yet