You might also like
- Thales BlueWatcherDocument2 pagesThales BlueWatcherScott_B4UNo ratings yet
- " Gasoline Direct Injection": Seminar Report OnDocument26 pages" Gasoline Direct Injection": Seminar Report OnSahal Babu50% (2)
- History of SonobuoysDocument3 pagesHistory of Sonobuoysa_espinoza_peyrotNo ratings yet
- Atlas Seaotter: Auv For Multi-Purpose Underwater OperationsDocument4 pagesAtlas Seaotter: Auv For Multi-Purpose Underwater OperationsMartin Schweighart MoyaNo ratings yet
- Van Den Pol - Aspects of Submarines - Parts 1-6Document33 pagesVan Den Pol - Aspects of Submarines - Parts 1-6Boris JorgenNo ratings yet
- The Virginia Class Submarine ProgramDocument12 pagesThe Virginia Class Submarine Programcjnjr1No ratings yet
- Tyre ManufacturingDocument57 pagesTyre ManufacturingSahal Babu60% (5)
- Pioneer Receiver - VSX-D512 - Service ManualDocument74 pagesPioneer Receiver - VSX-D512 - Service Manualtony castillo100% (1)
- Buoy and SignalDocument10 pagesBuoy and SignalViqy Muhammad Rafi100% (1)
- Underwater Warfare: Making A DifferenceDocument7 pagesUnderwater Warfare: Making A DifferencehocineNo ratings yet
- An - ssq-101 Adar SonobuoyDocument2 pagesAn - ssq-101 Adar Sonobuoya_espinoza_peyrotNo ratings yet
- An Ssq-53f Difar SonobuoyDocument2 pagesAn Ssq-53f Difar Sonobuoya_espinoza_peyrotNo ratings yet
- 2012 Shaw SubsDocument77 pages2012 Shaw SubsArthur BarieNo ratings yet
- Developments in MiningDocument19 pagesDevelopments in MininglawofseaNo ratings yet
- Taking Mines Seriously: Mine Warfare in China's Near SeasDocument37 pagesTaking Mines Seriously: Mine Warfare in China's Near SeasBlaze123x100% (1)
- BLACK-SHARK Torpedo's Stealth and PowerDocument2 pagesBLACK-SHARK Torpedo's Stealth and PowerlaltaputunnnsNo ratings yet
- FREMM The Multimissions FregateDocument4 pagesFREMM The Multimissions Fregateyounes-spirit100% (1)
- ANSSQ-553G Directional Passive SonobuoyDocument2 pagesANSSQ-553G Directional Passive SonobuoyAnonymous aOXD9JuqdNo ratings yet
- The Evolution of The Sonobuoy PDFDocument27 pagesThe Evolution of The Sonobuoy PDFoviraduNo ratings yet
- FLASH-S Dipping SonarDocument2 pagesFLASH-S Dipping SonarultrapampersNo ratings yet
- Is your NAVY ready? MEET the FUTURE Littoral WarfareDocument4 pagesIs your NAVY ready? MEET the FUTURE Littoral WarfareAaron MalekNo ratings yet
- Naval 1Document12 pagesNaval 1Nick NumlkNo ratings yet
- Minea SaesDocument2 pagesMinea SaesschelcherjNo ratings yet
- The History of The Sea MineDocument8 pagesThe History of The Sea Minesd_hosseini_88100% (1)
- Narrowband Passive Sonar Tracking TechniqueDocument6 pagesNarrowband Passive Sonar Tracking TechniqueBùi Trường Giang100% (1)
- Submarine - WikipediaDocument32 pagesSubmarine - WikipediaNaheed100% (1)
- Submarine Torpedo Fire Control ManualDocument66 pagesSubmarine Torpedo Fire Control Manualmav87th-1No ratings yet
- NTSP SonobuoyDocument44 pagesNTSP SonobuoyArijah HassanNo ratings yet
- Torpedo: Etymology HistoryDocument17 pagesTorpedo: Etymology HistoryferrysembNo ratings yet
- Sea Ceptor Datasheet 1360659743Document2 pagesSea Ceptor Datasheet 1360659743Ḿǿvấ Jểkǿ100% (1)
- SPY-1 Family Brochure 6-PagerDocument6 pagesSPY-1 Family Brochure 6-Pagerfox40No ratings yet
- Proximity Fuze - WikipediaDocument9 pagesProximity Fuze - WikipediasorinartistuNo ratings yet
- Sub Titans ManualDocument98 pagesSub Titans Manualgideon020No ratings yet
- KRONOS Grand Naval LQ mm07943 PDFDocument2 pagesKRONOS Grand Naval LQ mm07943 PDFsamsulkhoirulanamNo ratings yet
- SURTASS Provides Mobile Undersea SurveillanceDocument16 pagesSURTASS Provides Mobile Undersea SurveillanceFera Dwi SetyaniNo ratings yet
- Type 53 TorpedoDocument13 pagesType 53 TorpedoUnknown11100% (1)
- Training Section 5Document31 pagesTraining Section 5CeliaZurdoPerladoNo ratings yet
- Disarming TridentDocument14 pagesDisarming TridentJohn AinslieNo ratings yet
- Aster 30 Sampt PDFDocument2 pagesAster 30 Sampt PDFmig29No ratings yet
- Mine Warfare of WWI (Final)Document11 pagesMine Warfare of WWI (Final)Loren W Mitchell100% (1)
- AGM-114 Hellfire Missile SystemDocument8 pagesAGM-114 Hellfire Missile SystemDaniel Linn HootonNo ratings yet
- Saab Kockums-A26 Brochure A4 Final Aw ScreenDocument16 pagesSaab Kockums-A26 Brochure A4 Final Aw ScreenVictor Pileggi100% (2)
- ORPDocument16 pagesORPsamlagroneNo ratings yet
- Submarine: Submarine Boat (And Is Often Further Shortened To Sub)Document24 pagesSubmarine: Submarine Boat (And Is Often Further Shortened To Sub)priyanshuNo ratings yet
- Integrated ASW Suite for Effective Underwater WarfareDocument16 pagesIntegrated ASW Suite for Effective Underwater Warfarezhang yun100% (1)
- Improving Submarine Array IntegrationDocument8 pagesImproving Submarine Array IntegrationshahpinkalNo ratings yet
- Sea Giraffe AMB Web LowDocument6 pagesSea Giraffe AMB Web LowVictor PileggiNo ratings yet
- Defending: Naval BasesDocument16 pagesDefending: Naval BasesLuiz AlvesNo ratings yet
- Submarine-&-Naval Ship Design For The Littorals-Saab KockumsDocument15 pagesSubmarine-&-Naval Ship Design For The Littorals-Saab KockumsÁlvaro Conti FilhoNo ratings yet
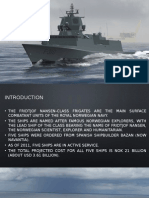
- The Fridtjof Nansen-Class Frigates - Royal Norwegian NavyDocument15 pagesThe Fridtjof Nansen-Class Frigates - Royal Norwegian NavyhindujudaicNo ratings yet
- Technology in The Littorals - Below The Surface and In-Shore (Linus)Document24 pagesTechnology in The Littorals - Below The Surface and In-Shore (Linus)mahoro100% (1)
- Sonar Introduction 2012 Compressed PDFDocument11 pagesSonar Introduction 2012 Compressed PDFBrenno Moura MouraNo ratings yet
- Sea Giraffe 4a Product BrochureDocument2 pagesSea Giraffe 4a Product Brochurebring it onNo ratings yet
- US Navy Course NAVEDTRA 14340 - Aviation Electricity & Electronics-Undersea Warfare (Usw)Document55 pagesUS Navy Course NAVEDTRA 14340 - Aviation Electricity & Electronics-Undersea Warfare (Usw)GeorgesNo ratings yet
- List of Conventional and Nuclear Submarines of IndiaDocument7 pagesList of Conventional and Nuclear Submarines of IndiaParveen SainiNo ratings yet
- Asw ConopsDocument5 pagesAsw Conopsem_nikolopoulosNo ratings yet
- Missile RangeDocument39 pagesMissile RangepraveenNo ratings yet
- Dutch Submarine Sinks Half of US Navy CTF in 1990 and MoreDocument2 pagesDutch Submarine Sinks Half of US Navy CTF in 1990 and Moredwaynefields100% (1)
- Ew 1Document91 pagesEw 1saven jayamanna100% (2)
- MF StarDocument2 pagesMF StarDrSomnath999No ratings yet
- Absalon And Esbern Snare. The Danish Navy’s Support Ships Of The Absalon ClassFrom EverandAbsalon And Esbern Snare. The Danish Navy’s Support Ships Of The Absalon ClassRating: 5 out of 5 stars5/5 (1)
- EWS Certificate KeralaDocument1 pageEWS Certificate KeralaSahal BabuNo ratings yet
- Printticket PDFDocument1 pagePrintticket PDFSahal BabuNo ratings yet
- Application Details - Railway Recruitment BoardDocument2 pagesApplication Details - Railway Recruitment BoardSahal BabuNo ratings yet
- Fast FoodDocument26 pagesFast FoodSahal BabuNo ratings yet
- A Study of Customer Perception of Youth Towards Branded Fashion ApparelsDocument51 pagesA Study of Customer Perception of Youth Towards Branded Fashion ApparelsSahal BabuNo ratings yet
- Civil FRNT PageDocument1 pageCivil FRNT PageSahal BabuNo ratings yet
- Hip Pxe) Co (Un Mà Vsaâð Ssìv) (HM Sse ) ) Co Mà°Niä¡Pff /nàt I ÄDocument6 pagesHip Pxe) Co (Un Mà Vsaâð Ssìv) (HM Sse ) ) Co Mà°Niä¡Pff /nàt I ÄSahal BabuNo ratings yet
- Hscap - 2O2O: Application No: 21015080 Name: Razal MohammedDocument2 pagesHscap - 2O2O: Application No: 21015080 Name: Razal MohammedSahal BabuNo ratings yet
- 1-Read Me FirstDocument1 page1-Read Me FirstsivanNo ratings yet
- Food Packaging ApplicationsDocument10 pagesFood Packaging ApplicationsSahal BabuNo ratings yet
- Apply Now: Continuing Education Courses in Magical SciencesDocument2 pagesApply Now: Continuing Education Courses in Magical SciencesSahal BabuNo ratings yet
- Wireless Networking Through Zigbee TechnologyDocument6 pagesWireless Networking Through Zigbee TechnologySahal BabuNo ratings yet
- CivilDocument14 pagesCivilSahal BabuNo ratings yet
- IRCTC LTD, Booked Ticket Printing1Document12 pagesIRCTC LTD, Booked Ticket Printing1Sahal BabuNo ratings yet
- Seminar Report On Laser Induced Ignition of Gasoline Direct Injection EnginesDocument22 pagesSeminar Report On Laser Induced Ignition of Gasoline Direct Injection EnginesSahal BabuNo ratings yet
- Flip ChipDocument36 pagesFlip ChipSahal BabuNo ratings yet
- Differentiated Services (DiffServ) Model ExplainedDocument10 pagesDifferentiated Services (DiffServ) Model ExplainedSahal BabuNo ratings yet
- CivilDocument14 pagesCivilSahal BabuNo ratings yet
- AdaptiveDocument21 pagesAdaptiveSahal BabuNo ratings yet
- Wins InstrumentDocument25 pagesWins InstrumentAnonymous czrvb3hNo ratings yet
- X InternetDocument31 pagesX InternetSahal BabuNo ratings yet
- MusicDocument22 pagesMusicSahal BabuNo ratings yet
- MusicDocument22 pagesMusicSahal BabuNo ratings yet
- Triangles Combine To Form Quadrilaterals: Materials RequiredDocument6 pagesTriangles Combine To Form Quadrilaterals: Materials RequiredSahal BabuNo ratings yet
- MusicDocument22 pagesMusicSahal BabuNo ratings yet
- Rescued DocumentDocument67 pagesRescued DocumentSahal BabuNo ratings yet
- MondisorriDocument39 pagesMondisorriSahal BabuNo ratings yet
- Lift Sensors Telemecanique-SensorsolutionsforescalatorandelevatorapplicationsDocument8 pagesLift Sensors Telemecanique-SensorsolutionsforescalatorandelevatorapplicationsBling Bling BombNo ratings yet
- مكبرات العمليات PDFDocument55 pagesمكبرات العمليات PDFmahmoud DawoodNo ratings yet
- Reversible LogicDocument4 pagesReversible LogicAbhinand SkNo ratings yet
- Toshiba - DP4500 3500 Service Manual (259 Pages)Document259 pagesToshiba - DP4500 3500 Service Manual (259 Pages)bienhocvobo100% (1)
- Introduction of MTK Tools V2 PDFDocument81 pagesIntroduction of MTK Tools V2 PDFJoao Carlos RamosNo ratings yet
- RF Project Engineer Mohd Faisal: ProfileDocument4 pagesRF Project Engineer Mohd Faisal: ProfileRonit SinghalNo ratings yet
- CPC 100 Reference Manual ENUDocument333 pagesCPC 100 Reference Manual ENUIvegaNo ratings yet
- LM5020 100V Current Mode PWM Controller: General Description FeaturesDocument13 pagesLM5020 100V Current Mode PWM Controller: General Description FeaturesAlonso CoradoNo ratings yet
- TroubleshootingDocument35 pagesTroubleshootingAlejandro MarsNo ratings yet
- Networking Concepts ExplainedDocument3 pagesNetworking Concepts ExplainedDaniel TendeanNo ratings yet
- Modicon TSX Micro Automation Platform: Presentation, Description, SelectionDocument14 pagesModicon TSX Micro Automation Platform: Presentation, Description, SelectionsebadolzNo ratings yet
- Manual 3com SuperStack II 3000 TXDocument144 pagesManual 3com SuperStack II 3000 TXnerdopNo ratings yet
- Go Getter 2 Owners ManualDocument21 pagesGo Getter 2 Owners ManualBrian LewNo ratings yet
- Design and Implementation of Audio Transceiver Using Infrared Laser For Audio Signal DetectionDocument4 pagesDesign and Implementation of Audio Transceiver Using Infrared Laser For Audio Signal DetectionGoitom HaileNo ratings yet
- GXT745Document24 pagesGXT745Ramy Abd RabouNo ratings yet
- Lecture 2.3: FET IntroductionDocument3 pagesLecture 2.3: FET IntroductionAids Sumalde0% (1)
- Paul White MiDi BasicsDocument10 pagesPaul White MiDi BasicsCarlos I. P. GarcíaNo ratings yet
- Fuse Terminal Block - 1500VDocument1 pageFuse Terminal Block - 1500VSEO BDMNo ratings yet
- Troubleshooting Tools and PC Dismantle and Assemble GuidesDocument20 pagesTroubleshooting Tools and PC Dismantle and Assemble GuidesUrrica Mari BrionesNo ratings yet
- W8 Local Area Network and Wide Area Network - ModuleDocument6 pagesW8 Local Area Network and Wide Area Network - ModuleClash ClanNo ratings yet
- Sucursal Colón Quito Sucursal Sur Quito Centro de Servicios Técnicos Sucursal Mayor Guayaquil Sucursal Sur Guayaquil Principal QuitoDocument6 pagesSucursal Colón Quito Sucursal Sur Quito Centro de Servicios Técnicos Sucursal Mayor Guayaquil Sucursal Sur Guayaquil Principal QuitoTamara SuconotaNo ratings yet
- Install and connect your Citizens Band radioDocument14 pagesInstall and connect your Citizens Band radioJosue Hernandez GutierrezNo ratings yet
- Led TV: User ManualDocument2 pagesLed TV: User ManualJanith Saumya BandaraNo ratings yet
- Lmx24-N, Lm2902-N Low-Power, Quad-Operational Amplifiers: 1 Features 3 DescriptionDocument38 pagesLmx24-N, Lm2902-N Low-Power, Quad-Operational Amplifiers: 1 Features 3 DescriptionRoni SocompiNo ratings yet
- ECG CircuitDocument118 pagesECG CircuitOmur NoorNo ratings yet
- Symo GEN24 Full Backup2Document172 pagesSymo GEN24 Full Backup2Mihai RaduNo ratings yet
- Medical Instrumentation Application and DesignDocument9 pagesMedical Instrumentation Application and DesignAndres ContrerasNo ratings yet
- Cce HPS-2912G PDFDocument1 pageCce HPS-2912G PDFJosé Nicolás Auciello INo ratings yet