You might also like
- Industrial ElectronicsDocument39 pagesIndustrial ElectronicsGuruKPONo ratings yet
- Elect Machine Total 2012Document22 pagesElect Machine Total 2012NGOUNENo ratings yet
- Mechatronics Unit III and IV Question and AnswersDocument6 pagesMechatronics Unit III and IV Question and AnswersSaravanan MathiNo ratings yet
- Chapter 1 DC Drives Part1Document46 pagesChapter 1 DC Drives Part1Mohammad MunzirNo ratings yet
- What is a Transfer FunctionDocument27 pagesWhat is a Transfer FunctionNandakumarNo ratings yet
- MechatronicsDocument22 pagesMechatronicsDavid AbbreyNo ratings yet
- DC Motor Lecture 3Document27 pagesDC Motor Lecture 3Fira tubeNo ratings yet
- TQ - TheoryMachinesDocument8 pagesTQ - TheoryMachinesnachu_crazy100% (1)
- TRANSDUCERDocument11 pagesTRANSDUCERLucks GonzalesNo ratings yet
- Introduction of MechatronicsDocument23 pagesIntroduction of MechatronicsSathish SatNo ratings yet
- An Efficient Approach For Short Term Load ForecastingDocument21 pagesAn Efficient Approach For Short Term Load Forecastinggsaibaba100% (1)
- Adc and Dac CNV ErrorsDocument26 pagesAdc and Dac CNV ErrorsAnonymous TPVfFif6TO100% (2)
- Unit1 - Introducation To MechatronicsDocument92 pagesUnit1 - Introducation To Mechatronicsguddu100% (3)
- Vernier CallipersDocument5 pagesVernier CallipersknsaravanaNo ratings yet
- Introduction to Instrumentation MeasurementDocument126 pagesIntroduction to Instrumentation MeasurementbelaynehNo ratings yet
- PLC Unit 2-1 PDFDocument44 pagesPLC Unit 2-1 PDFMahesh ShendeNo ratings yet
- Introduction To Control SystemDocument47 pagesIntroduction To Control SystemDlan Dela CruzNo ratings yet
- Single Phase TransformerDocument11 pagesSingle Phase TransformerArijeet MondalNo ratings yet
- Introduction to Mechatronics SystemsDocument86 pagesIntroduction to Mechatronics SystemsSt. Anne's CET (EEE Department)No ratings yet
- Speed control of three phase induction motorsDocument26 pagesSpeed control of three phase induction motorsrajasekaranNo ratings yet
- Programmable Logic Controller (PLC)Document16 pagesProgrammable Logic Controller (PLC)Manish Kumar sharma100% (19)
- PV PQ Bus Switching Power Flow Pscc2008 - 128Document7 pagesPV PQ Bus Switching Power Flow Pscc2008 - 128kcirrenwodNo ratings yet
- PLC Operated Cutting MachineDocument9 pagesPLC Operated Cutting MachineIJRASETPublicationsNo ratings yet
- Chapter 4 DC To Ac INVERTERSDocument57 pagesChapter 4 DC To Ac INVERTERSAlester GabrielNo ratings yet
- Synchronous Machine Power and Torque CalculationDocument18 pagesSynchronous Machine Power and Torque CalculationUsama RaoNo ratings yet
- Introduction To Sensors in MechatronicsDocument20 pagesIntroduction To Sensors in MechatronicsRadhaMadhavNo ratings yet
- Lecture Notes Set 1 - Introduction To Mechatronics System DesignDocument16 pagesLecture Notes Set 1 - Introduction To Mechatronics System DesignMark AzzopardiNo ratings yet
- How to Select MCBs and MCCBs: A Guide to Key Parameters (Part 1Document4 pagesHow to Select MCBs and MCCBs: A Guide to Key Parameters (Part 1guddu1348150% (2)
- Transducer and SensorDocument92 pagesTransducer and SensorFemi PrinceNo ratings yet
- EPL Lab ManualDocument74 pagesEPL Lab ManualPrince Vineeth67% (3)
- UNIT 3 MechatronicsDocument38 pagesUNIT 3 MechatronicsMuthuvel M67% (6)
- HIT PLC Programming Course Covers Control, NetworksDocument7 pagesHIT PLC Programming Course Covers Control, NetworksTanaka dzapasi100% (1)
- Mod 1.1Document14 pagesMod 1.1Mr. K.S. Raghul Asst Prof MECHNo ratings yet
- GTU B.E Semester 4 Mechatronics Course on Basic MechatronicsDocument2 pagesGTU B.E Semester 4 Mechatronics Course on Basic Mechatronicssandysubash100% (1)
- Digital Energy MeterDocument1 pageDigital Energy MetersskendreNo ratings yet
- Electronics IndustrialDocument6 pagesElectronics IndustrialhongNo ratings yet
- Robot Actuators & Feed Back ComponentsDocument25 pagesRobot Actuators & Feed Back ComponentsANONYMOUS PDFSNo ratings yet
- Temperature Control SystemDocument2 pagesTemperature Control SystemNagulapati KiranNo ratings yet
- MNRE's Journey Towards Renewable EnergyDocument25 pagesMNRE's Journey Towards Renewable EnergysuniltiwNo ratings yet
- Strain Gauge LectureDocument48 pagesStrain Gauge LectureSridhar Kanagaraj100% (1)
- Speed Control of DC MotorDocument18 pagesSpeed Control of DC Motorkrishnareddy_chintalaNo ratings yet
- Chapter1-Basic Concepts of Measurements-09Document21 pagesChapter1-Basic Concepts of Measurements-09azrurezuan100% (1)
- Assignment PSEDocument5 pagesAssignment PSEdipakk beraNo ratings yet
- Achieving Stable Magnetic Levitation On The Arduino PlatformDocument15 pagesAchieving Stable Magnetic Levitation On The Arduino Platformzub12345678No ratings yet
- Lecture 7 - Sensors & TransducersDocument60 pagesLecture 7 - Sensors & TransducersSceva AquilaNo ratings yet
- Chapter 2 - Introduction To Control SystemDocument20 pagesChapter 2 - Introduction To Control Systemasraf_mech100% (2)
- Design of Mechatronics SystemDocument28 pagesDesign of Mechatronics SystemMamo ZelalemNo ratings yet
- Digital Controlled System Lab Manual PDFDocument43 pagesDigital Controlled System Lab Manual PDFsoumencha100% (3)
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDocument5 pagesPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNo ratings yet
- KUET Mechatronics Lab 01 on Sensors and SwitchesDocument22 pagesKUET Mechatronics Lab 01 on Sensors and SwitchesSourav RoyNo ratings yet
- Saket Udar 18BEC0760: Definition: Measuring Devices Temperature, Displacement, Vibration EtcDocument6 pagesSaket Udar 18BEC0760: Definition: Measuring Devices Temperature, Displacement, Vibration EtcAlexzander PatelNo ratings yet
- Sensor and Transducer: Electrical Devices, Such As ComputersDocument10 pagesSensor and Transducer: Electrical Devices, Such As ComputersSamuelNo ratings yet
- Eddy PiezoDocument19 pagesEddy Piezoshrish ukhalkarNo ratings yet
- Instrumentation and Control AssignmentDocument11 pagesInstrumentation and Control AssignmentRuairi Mc AloranNo ratings yet
- Module1 Basics of Energy TransformationDocument10 pagesModule1 Basics of Energy TransformationSanjana SNo ratings yet
- Eddy probe system based on new technology for nondestructive testingDocument6 pagesEddy probe system based on new technology for nondestructive testingNatthaphon NaosookNo ratings yet
- Non Contact Sensor PDFDocument24 pagesNon Contact Sensor PDFGaurav R AgrawalNo ratings yet
- Clin. Eng. LabsDocument67 pagesClin. Eng. Labsप्रथमेश क्षीरसागरNo ratings yet
- Transduction PrinciplesDocument14 pagesTransduction PrinciplesNavin KaranthNo ratings yet
- FPDocument1 pageFPmann20No ratings yet
- Linear Programming PDFDocument17 pagesLinear Programming PDFmann20No ratings yet
- Pro Engineer WF 4 PDFDocument13 pagesPro Engineer WF 4 PDFmann20No ratings yet
- Lean ManufacturingDocument1 pageLean Manufacturingmann20No ratings yet
- Advanced MFG ProcessesDocument26 pagesAdvanced MFG Processesmann20No ratings yet
- Citstudents - In: Unit-Iii Transportation ModelDocument19 pagesCitstudents - In: Unit-Iii Transportation Modelmann20No ratings yet
- Basic TPS HandbookDocument33 pagesBasic TPS HandbookSumith KobewattaNo ratings yet
- Rapid PrototypeDocument13 pagesRapid Prototypemann20No ratings yet
- High Strength Die Casting Alloy UNIFONT-94Document1 pageHigh Strength Die Casting Alloy UNIFONT-94mann20No ratings yet
- Whatsapp For PC Installation GuideDocument10 pagesWhatsapp For PC Installation Guidemann200% (1)
- Improving Work Methods and ProductivityDocument8 pagesImproving Work Methods and Productivitymann20No ratings yet
- Pom Introduction by VMJLDocument44 pagesPom Introduction by VMJLmann20No ratings yet
- Classification of Processes and Flow Chart of Foundry OperationsDocument1 pageClassification of Processes and Flow Chart of Foundry Operationsmann20No ratings yet
- Kinematics of MachinesDocument2 pagesKinematics of MachinesBhavesh J MakwanaNo ratings yet
- Steel and Cast Iron Bar Compression ProblemDocument26 pagesSteel and Cast Iron Bar Compression ProblemLarete PaoloNo ratings yet
- High Pressure Gear Pump GuideDocument12 pagesHigh Pressure Gear Pump GuideMauricio Ariel H. OrellanaNo ratings yet
- FiatDocument10 pagesFiatrgi178100% (1)
- Vortex Induced Vibration Aquatic Clean Energy Ijariie4114Document5 pagesVortex Induced Vibration Aquatic Clean Energy Ijariie4114Reham El- DawyNo ratings yet
- IX Exercise Rev 02 PDFDocument11 pagesIX Exercise Rev 02 PDFweerasinghekNo ratings yet
- LHB Monograph PDFDocument60 pagesLHB Monograph PDFVijay Ranjan KumarNo ratings yet
- SPC Platina 125 Disc (2018 12 28)Document70 pagesSPC Platina 125 Disc (2018 12 28)Willy Mansilla A100% (1)
- Válvula Relief RD-10A-25WL IB6B9 (Data Sheet)Document1 pageVálvula Relief RD-10A-25WL IB6B9 (Data Sheet)Arturo Valencia LaureanoNo ratings yet
- Blowoff ExplanationDocument5 pagesBlowoff ExplanationPablo SanciminoNo ratings yet
- 101 FA08 HE2SolvedDocument12 pages101 FA08 HE2SolvedJulio César Macías ZamoraNo ratings yet
- Hvac NotesDocument9 pagesHvac NotesMegha SinghNo ratings yet
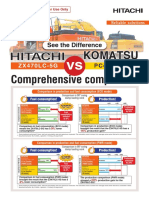
- ZX470-5G Vs Komatsu PC400-8Document3 pagesZX470-5G Vs Komatsu PC400-8Sohibul AminNo ratings yet
- Catalogo Completo Flojet Pompe Pumps Bombas Catalogue Xylem Tem SRL ItaliaDocument81 pagesCatalogo Completo Flojet Pompe Pumps Bombas Catalogue Xylem Tem SRL ItaliaDiana GoriNo ratings yet
- Transverse Analysis of Full-Scale Precast Segmental Box Girder Segments WithDocument11 pagesTransverse Analysis of Full-Scale Precast Segmental Box Girder Segments WithbistsushantNo ratings yet
- Calculation of Gear Dimensions - KHK Gears PDFDocument25 pagesCalculation of Gear Dimensions - KHK Gears PDFlawlawNo ratings yet
- 6.7L Cummins Maintenance Schedule & Service InformationDocument3 pages6.7L Cummins Maintenance Schedule & Service InformationNick Brady100% (1)
- KSB Etabloc Jelleggorbe 50hzDocument172 pagesKSB Etabloc Jelleggorbe 50hzUmar MajeedNo ratings yet
- Downtime BD TyreDocument127 pagesDowntime BD TyreRidhani IqbalNo ratings yet
- 2008 BevanphdDocument194 pages2008 Bevanphdrajm100% (1)
- Soil Strength Testing With The Merrick FlexometerDocument95 pagesSoil Strength Testing With The Merrick Flexometerd080310No ratings yet
- DT - Hardness TestDocument30 pagesDT - Hardness TestSamuel Christian GiovanniNo ratings yet
- 1 - Acoustic Emission Techniques Standardized For Concrete StructuresDocument12 pages1 - Acoustic Emission Techniques Standardized For Concrete StructuresJithinRajNo ratings yet
- Automatic Acceleration Controlling System in Traffic SignalsDocument4 pagesAutomatic Acceleration Controlling System in Traffic Signalsieee4mybusinessonlyNo ratings yet
- Fluid and Fluid PropertiesDocument42 pagesFluid and Fluid PropertiesCIPETIPT Tool RoomNo ratings yet
- Piping System BookbindDocument19 pagesPiping System BookbindCharles Amiel DionisioNo ratings yet
- ME Engine Shows Real Fuel Savings: DieselfactsDocument16 pagesME Engine Shows Real Fuel Savings: DieselfactsKamal WanniarachchiNo ratings yet
- Module 2Document59 pagesModule 2PSkotsNo ratings yet
- REE 6031 Tutorial 1Document5 pagesREE 6031 Tutorial 1Eng Maboshe Charles Namafe0% (1)
- Bending and Transverse TensionDocument23 pagesBending and Transverse TensionAsghar Hussain ShahNo ratings yet
- Sectional Properties of Rolled Steel Joists (Ref: Is: 808 - 1989 & Is: 12778 - 2004)Document49 pagesSectional Properties of Rolled Steel Joists (Ref: Is: 808 - 1989 & Is: 12778 - 2004)rohitnrgNo ratings yet