You might also like
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Control System Performance SpecificationsDocument35 pagesControl System Performance SpecificationsVishal Vn0% (1)
- Ei 7211-Circuit Simulation Lab List of ExperimentsDocument61 pagesEi 7211-Circuit Simulation Lab List of ExperimentsKʀɩsʜŋʌ KʌŋʌŋNo ratings yet
- Routh Criterion - Tutorial 7 - Co - 12Document3 pagesRouth Criterion - Tutorial 7 - Co - 12Haelu KuNo ratings yet
- Sliding Mode Control of DC MotorDocument5 pagesSliding Mode Control of DC MotorPham Quoc ThienNo ratings yet
- E23b PDFDocument16 pagesE23b PDFAswad Che RusminNo ratings yet
- Matlab Code For Sorted Real Schur FormsDocument20 pagesMatlab Code For Sorted Real Schur FormsOhwil100% (1)
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDocument5 pagesExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathNo ratings yet
- MatLab AssignmentDocument9 pagesMatLab AssignmentTher Htet AungNo ratings yet
- State Errors - Steady: Eman Ahmad KhalafDocument28 pagesState Errors - Steady: Eman Ahmad KhalafAhmed Mohammed khalfNo ratings yet
- 6 - Signal Flow GraphsDocument59 pages6 - Signal Flow GraphsSuyash Dahake VlogsNo ratings yet
- Lab Manual - TheoryDocument49 pagesLab Manual - TheoryLovely VinayNo ratings yet
- Mechatronics (2015) Unit IIDocument38 pagesMechatronics (2015) Unit IIkishan100% (1)
- Fuzzy Gain Scheduling of PID Controllers PDFDocument7 pagesFuzzy Gain Scheduling of PID Controllers PDFMiguel ZeaNo ratings yet
- CS 2255 Control Systems Question BankDocument62 pagesCS 2255 Control Systems Question BankreporterrajiniNo ratings yet
- CISE 316 Control Systems Design Lab ManualDocument78 pagesCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- Literature Review of PID Controller Based On Various Soft Computing TechniquesDocument4 pagesLiterature Review of PID Controller Based On Various Soft Computing TechniquesEditor IJRITCCNo ratings yet
- LQRDocument14 pagesLQRStefania Oliveira100% (1)
- Polar & Nyquist Plots: Multiple Choice Questions For Online ExamDocument18 pagesPolar & Nyquist Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtNo ratings yet
- State Space DesignDocument47 pagesState Space DesigneuticusNo ratings yet
- Complex Engineering Problem StatementDocument10 pagesComplex Engineering Problem StatementMuhammad MashamNo ratings yet
- Lab 6 LCS 078Document13 pagesLab 6 LCS 078Asad saeedNo ratings yet
- KANNUR UNIVERSITY BTech.S7 EE SyllabusDocument16 pagesKANNUR UNIVERSITY BTech.S7 EE SyllabusManu K MNo ratings yet
- Eee.60-62Document3 pagesEee.60-62skrtamilNo ratings yet
- Solution 1.: Matlab CodeDocument9 pagesSolution 1.: Matlab Codeamitkumar_87100% (1)
- Control Lecture 8 Poles Performance and StabilityDocument20 pagesControl Lecture 8 Poles Performance and StabilitySabine Brosch100% (1)
- "Digital Clock": A Lab Project Report OnDocument11 pages"Digital Clock": A Lab Project Report Onabu hureraNo ratings yet
- Frequency Response For Control System Analysis - GATE Study Material in PDFDocument8 pagesFrequency Response For Control System Analysis - GATE Study Material in PDFnidhi tripathiNo ratings yet
- Electronics Measurements and Instrumentation Ebook & NotesDocument94 pagesElectronics Measurements and Instrumentation Ebook & NotesGunjan JhaNo ratings yet
- Control System (PT)Document7 pagesControl System (PT)MATHANKUMAR.SNo ratings yet
- Fundamental Design GoalsDocument3 pagesFundamental Design Goalslilsoldier50% (2)
- Unit I - Discrete State-Variable Technique Q.No Questions: Scalar Adder IntegratorDocument184 pagesUnit I - Discrete State-Variable Technique Q.No Questions: Scalar Adder IntegratorAgatha ChristieNo ratings yet
- Control Systems Presentation On Block Diagram AlgebraDocument6 pagesControl Systems Presentation On Block Diagram AlgebraSukanya SadhukhanNo ratings yet
- EE T65 Digital Signal ProcessingDocument34 pagesEE T65 Digital Signal ProcessingThiagu Rajiv100% (1)
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- Lecture-3 Modeling in Time DomainDocument24 pagesLecture-3 Modeling in Time DomainRayana ray0% (1)
- Transfer Function of The DC Motor (Yaser Rahmati)Document4 pagesTransfer Function of The DC Motor (Yaser Rahmati)Farag AlargtNo ratings yet
- Ziegler Nichols Matlab PDFDocument8 pagesZiegler Nichols Matlab PDFMarco Arcos100% (2)
- Electrical Network, Graph Theory, Incidence Matrix, TopologyDocument53 pagesElectrical Network, Graph Theory, Incidence Matrix, TopologyJoyprakash Lairenlakpam100% (1)
- Compensation in Control SystemDocument10 pagesCompensation in Control Systemshouvikchaudhuri0% (1)
- Lab Cruise Control - Modeling Part2 PDFDocument10 pagesLab Cruise Control - Modeling Part2 PDFJose Ortiz SuclupeNo ratings yet
- Control System Question BankDocument3 pagesControl System Question Bankmanish_iitrNo ratings yet
- Control System QB MsajceDocument54 pagesControl System QB MsajceformyphdNo ratings yet
- Linear Quadratic RegulatorDocument4 pagesLinear Quadratic RegulatorFlorian PjetriNo ratings yet
- Advanced Control, Lecture 2,3, Modeling and LinearizationDocument48 pagesAdvanced Control, Lecture 2,3, Modeling and LinearizationsepehrNo ratings yet
- State Space Model TutorialDocument5 pagesState Space Model Tutorialsf111No ratings yet
- Plotting of Bode Plots, Root Locus and Nyquist PlotsDocument6 pagesPlotting of Bode Plots, Root Locus and Nyquist PlotsPuduru BharathiNo ratings yet
- Introduction To Control SystemDocument51 pagesIntroduction To Control SystemNorkarlina Binti Khairul AriffinNo ratings yet
- Time Response AnalysisDocument43 pagesTime Response AnalysisAkmal IsnaeniNo ratings yet
- Adaptive ControlDocument26 pagesAdaptive ControlKiran RavyNo ratings yet
- UNIT I, II, III, IV, V Notes PDFDocument93 pagesUNIT I, II, III, IV, V Notes PDFThiagu RajivNo ratings yet
- Control System Engineering - 1Document22 pagesControl System Engineering - 1Uma MageshwariNo ratings yet
- Full Order Observer Controller Design For DC Motor Based On State Space ApproachDocument5 pagesFull Order Observer Controller Design For DC Motor Based On State Space ApproachSelaRajNo ratings yet
- Files 2-Chapters 10 5 Transient Response SpecificationsDocument9 pagesFiles 2-Chapters 10 5 Transient Response SpecificationsYalemwork YargalNo ratings yet
- Introduction To Control SystemsDocument28 pagesIntroduction To Control SystemsAK MizanNo ratings yet
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Numerical Solutions of Boundary Value Problems for Ordinary Differential EquationsFrom EverandNumerical Solutions of Boundary Value Problems for Ordinary Differential EquationsA.K. AzizNo ratings yet
- Well-Posedness and Internal StabilityDocument48 pagesWell-Posedness and Internal StabilityAparna AkhileshNo ratings yet
- Solid State Power ControllersDocument4 pagesSolid State Power ControllersAparna AkhileshNo ratings yet
- 6 and 12 Step InverterDocument42 pages6 and 12 Step InverterAparna AkhileshNo ratings yet
- I/O Package: Package Contains Many Classes That Your Programs Can Use To Read andDocument3 pagesI/O Package: Package Contains Many Classes That Your Programs Can Use To Read andAparna AkhileshNo ratings yet
- IsmoDocument27 pagesIsmoAparna AkhileshNo ratings yet
- Dr. Apj Speech at Dps UaeDocument16 pagesDr. Apj Speech at Dps UaeAparna AkhileshNo ratings yet
- Overview Nano MaterialsDocument34 pagesOverview Nano MaterialsAparna AkhileshNo ratings yet
- M.E. Construction Engineering and Management 30.10.08revisedDocument36 pagesM.E. Construction Engineering and Management 30.10.08revisedAparna AkhileshNo ratings yet
- ABB Contactor RelaysDocument17 pagesABB Contactor RelaysAparna AkhileshNo ratings yet
- Reading Material CH 14 Other Artificial Lift MethodsDocument18 pagesReading Material CH 14 Other Artificial Lift MethodsSagar DadhichNo ratings yet
- Drive ConfigDocument136 pagesDrive ConfigGiangDoNo ratings yet
- Head Office:: Speciality Urethanes Private LimitedDocument9 pagesHead Office:: Speciality Urethanes Private Limitedashsatao8929No ratings yet
- Course Material Fees: Terms 1190 - 1193Document8 pagesCourse Material Fees: Terms 1190 - 1193Frances Ijeoma ObiakorNo ratings yet
- Universal USB Installer - Easy As 1 2 3 - USB Pen Drive LinuxDocument4 pagesUniversal USB Installer - Easy As 1 2 3 - USB Pen Drive LinuxAishwarya GuptaNo ratings yet
- Sd-1-Parts-Book Manual Propietario SpreaderDocument30 pagesSd-1-Parts-Book Manual Propietario Spreadergabriel sanchezNo ratings yet
- Cold Rolled Steel Sheet-JFE PDFDocument32 pagesCold Rolled Steel Sheet-JFE PDFEduardo Javier Granados SanchezNo ratings yet
- Oracle E-Business Suite Release 12.2.6 Readme (Doc ID 2114016.1)Document18 pagesOracle E-Business Suite Release 12.2.6 Readme (Doc ID 2114016.1)KingNo ratings yet
- Fm-II Quiz 1 19-20 - Section1 - Set1Document2 pagesFm-II Quiz 1 19-20 - Section1 - Set1nivedithashetty0123No ratings yet
- d9 VolvoDocument57 pagesd9 Volvofranklin972100% (2)
- TRCM Safe Parking: Technical InformationDocument2 pagesTRCM Safe Parking: Technical InformationMirek BudaNo ratings yet
- BMW X4 (2019-2022) Vs Audi Q5 Vs Land Rover Discovery Sport Vs Mercedes-Benz GLE - CarWaleDocument1 pageBMW X4 (2019-2022) Vs Audi Q5 Vs Land Rover Discovery Sport Vs Mercedes-Benz GLE - CarWaleSahil GoyalNo ratings yet
- RTE Online Application Form For Admission Year 2018 19Document6 pagesRTE Online Application Form For Admission Year 2018 19sudheer singhNo ratings yet
- Ecg Signal Thesis1Document74 pagesEcg Signal Thesis1McSudul HasanNo ratings yet
- (Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)Document66 pages(Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)양종렬No ratings yet
- Tectubi Raccordi Nuclear Ref ListDocument8 pagesTectubi Raccordi Nuclear Ref Listpomabe13No ratings yet
- Content Beyond SyllabusDocument3 pagesContent Beyond SyllabusRahul PolNo ratings yet
- Testing Report For Pressure Relief Valves: Petrofac International (UAE) LLCDocument1 pageTesting Report For Pressure Relief Valves: Petrofac International (UAE) LLCmurthy challapalliNo ratings yet
- SW Product SummaryDocument64 pagesSW Product SummaryFabio MenegatoNo ratings yet
- Cloud Computing - Feb-Mar 2017Document40 pagesCloud Computing - Feb-Mar 2017Abhishek SinghNo ratings yet
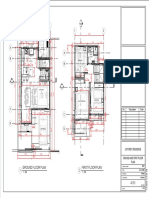
- Floor Plans & ElevationsDocument6 pagesFloor Plans & Elevationsbryan cardonaNo ratings yet
- Technical Information: Chemical Resistance ChartDocument7 pagesTechnical Information: Chemical Resistance ChartthessandNo ratings yet
- Health Safety StatementDocument22 pagesHealth Safety StatementShafiqul IslamNo ratings yet
- Available Protocols in PcVueDocument5 pagesAvailable Protocols in PcVueWan EzzatNo ratings yet
- Reverse Logistics: Overview and Challenges For Supply Chain ManagementDocument7 pagesReverse Logistics: Overview and Challenges For Supply Chain ManagementSri WulandariNo ratings yet
- CatalogDocument76 pagesCatalogmkpasha55mpNo ratings yet
- Seafastening Calculations Transit ModifiedDocument380 pagesSeafastening Calculations Transit ModifiedUtkarsh RamayanNo ratings yet
- Technical Data For Elevator Buckets - Bucket ElevatorDocument1 pageTechnical Data For Elevator Buckets - Bucket ElevatorFitra VertikalNo ratings yet
- Quidway 20S5300 20series 20ethernet 20switches 20hardware 20Document98 pagesQuidway 20S5300 20series 20ethernet 20switches 20hardware 20Hamza_yakan967No ratings yet
- Use Case Diagram For Employee Management SystemDocument60 pagesUse Case Diagram For Employee Management SystemAnant JaiswalNo ratings yet