You might also like
- Intermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingFrom EverandIntermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingNo ratings yet
- Boot Loader Enable PIC Micro ControllersDocument8 pagesBoot Loader Enable PIC Micro Controllersjoeccorrrea100% (2)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- USER MANUAL Mab - 51Document93 pagesUSER MANUAL Mab - 51Pushpinder Singh KhalsaNo ratings yet
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingFrom EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingRating: 4 out of 5 stars4/5 (1)
- Exp-01Document13 pagesExp-01Prisha SinghaniaNo ratings yet
- Micro Lab Experiment#1Document4 pagesMicro Lab Experiment#1Umair HameedNo ratings yet
- Guava P IV 2 UpdatedDocument72 pagesGuava P IV 2 UpdatedRaveendra Moodithaya100% (1)
- ES ManualDocument29 pagesES ManualManoj PNo ratings yet
- Microcontroller and Embedded System Designs (EE-328-F) : Lab Manual Vi SemesterDocument43 pagesMicrocontroller and Embedded System Designs (EE-328-F) : Lab Manual Vi SemesterabNo ratings yet
- User's Guide: Developed As Learning Material For Training of Students Under TEQIPDocument21 pagesUser's Guide: Developed As Learning Material For Training of Students Under TEQIPyogeshmgaidhaneNo ratings yet
- mcb1700 LAB - Intro - ARM Cortex m3Document22 pagesmcb1700 LAB - Intro - ARM Cortex m3RagulANNo ratings yet
- Avr Dev BRD User ManualDocument17 pagesAvr Dev BRD User ManualVipul MistryNo ratings yet
- Arm Lab ManualDocument23 pagesArm Lab ManualShruthi Elisha0% (2)
- AVR TutorialDocument11 pagesAVR Tutorialletanbaospkt06No ratings yet
- Zigbee Interfacing ARM7 PrimerDocument14 pagesZigbee Interfacing ARM7 PrimervivekgwdNo ratings yet
- 7 SegmentDocument14 pages7 SegmentTudor CiotloșNo ratings yet
- Elesof: Dc-MotorDocument44 pagesElesof: Dc-Motorabhay2703100% (3)
- I2c 2004 LCDDocument26 pagesI2c 2004 LCDizaqui bernardoNo ratings yet
- Report1 Embeded Wong SetelDocument7 pagesReport1 Embeded Wong Setelekalrudy20No ratings yet
- Pic ManualDocument30 pagesPic Manualgg.ganapathy100% (2)
- PIC LAB ManualDocument13 pagesPIC LAB ManualxyzzyzNo ratings yet
- At89s52 GLCD Stk1 UgDocument7 pagesAt89s52 GLCD Stk1 UgAlberto SequeiraNo ratings yet
- EDGE Artix 7 Board Demonstration Manual PDFDocument32 pagesEDGE Artix 7 Board Demonstration Manual PDFsubashNo ratings yet
- Handson Technology: 3-Axis CNC/Stepper Motor Shield For ArduinoDocument12 pagesHandson Technology: 3-Axis CNC/Stepper Motor Shield For Arduinofergon1961No ratings yet
- Write A Program For Interfacing The 16x2 LCD MODULES AimDocument7 pagesWrite A Program For Interfacing The 16x2 LCD MODULES AimLeelasrikanth TubatiNo ratings yet
- STK500 User GuideDocument16 pagesSTK500 User GuideupeshalaNo ratings yet
- Project2 PsocDocument10 pagesProject2 PsocKarthik V KalyaniNo ratings yet
- Pes1ug20ec217 Isa03 2022 23 Ue20ec324Document11 pagesPes1ug20ec217 Isa03 2022 23 Ue20ec324Vaishnavi B VNo ratings yet
- New DSD Manual Rvitm (4-7)Document72 pagesNew DSD Manual Rvitm (4-7)Spam SpamNo ratings yet
- User Manual of Blueboard Arm7 NXP Lpc2148Document6 pagesUser Manual of Blueboard Arm7 NXP Lpc2148vikramsimhareddyNo ratings yet
- Microcontroller Lab ManualDocument127 pagesMicrocontroller Lab Manualsiri.pogula100% (2)
- WWW Engineersgarage Com Serial Data Received From PC Using 8Document14 pagesWWW Engineersgarage Com Serial Data Received From PC Using 8Javier ParedesNo ratings yet
- VSK - 2148 Emb LabDocument73 pagesVSK - 2148 Emb LabrahumanNo ratings yet
- Programming Cable Users GuideDocument13 pagesProgramming Cable Users GuideSahal AhammedNo ratings yet
- Exp3 PDFDocument8 pagesExp3 PDFsafanaNo ratings yet
- Rx600 LCD Demo App NoteDocument20 pagesRx600 LCD Demo App NoteNick GartNo ratings yet
- SRTDocument7 pagesSRTrobin0903No ratings yet
- Aim: Interfacing of Leds Connected To Port0 (P0) of Lpc-2148Document4 pagesAim: Interfacing of Leds Connected To Port0 (P0) of Lpc-2148Vinod SabdeNo ratings yet
- NI6528Document27 pagesNI6528paulpuscasuNo ratings yet
- Microcontroller For Embedded Systems RIC-651Document27 pagesMicrocontroller For Embedded Systems RIC-651এম.এস.এম রবিনNo ratings yet
- Vlsi Lab DocumentDocument18 pagesVlsi Lab DocumentRaffi SkNo ratings yet
- Krypton ManualDocument10 pagesKrypton ManualNaman JainNo ratings yet
- Quasar Project Kit # 3123 - Atmel 89Xxxx ProgrammerDocument7 pagesQuasar Project Kit # 3123 - Atmel 89Xxxx ProgrammerRohit ParmarNo ratings yet
- Manual For Cycle 1Document193 pagesManual For Cycle 1Seth GreeneNo ratings yet
- AVR USB Programmer ManualV2Document20 pagesAVR USB Programmer ManualV2annbennNo ratings yet
- Project General DescriptionDocument6 pagesProject General DescriptionifyNo ratings yet
- Esamcb51 UmDocument28 pagesEsamcb51 Umtallurips91No ratings yet
- Lab3 PDFDocument14 pagesLab3 PDFMd.Arifur RahmanNo ratings yet
- Keil Uvision 3 TutorialDocument12 pagesKeil Uvision 3 Tutorialapi-3697475100% (1)
- RS232 Communication Using PIC18F4520 S USART PIC Micro Controller Tutorial Extreme ElectronicsDocument24 pagesRS232 Communication Using PIC18F4520 S USART PIC Micro Controller Tutorial Extreme ElectronicsHectorLopez100% (1)
- AVRStudio C Programming With Arduino RevCDocument40 pagesAVRStudio C Programming With Arduino RevCTran Tien DatNo ratings yet
- Keil Emulator For C166 InfeneonDocument31 pagesKeil Emulator For C166 Infeneonciwic85343No ratings yet
- PIC16F877 Microcontroller TutorialDocument37 pagesPIC16F877 Microcontroller Tutorialmc_prayer100% (4)
- Kinco PLC TrainingDocument79 pagesKinco PLC TrainingshroffspNo ratings yet
- Cortex M3 LPC1768 ManualDocument68 pagesCortex M3 LPC1768 Manuallaxmipriya bishoiNo ratings yet
- Eedt6usermanual PDFDocument36 pagesEedt6usermanual PDFhafiz arslanNo ratings yet
- CatalogDocument34 pagesCatalogapi-3721578No ratings yet
- I2c 1602 LCDDocument8 pagesI2c 1602 LCDnarwres barhoumiNo ratings yet
- Ajax CNC Installation ManualDocument27 pagesAjax CNC Installation ManualsunhuynhNo ratings yet
- 7-Segment Display & ADC Controls With 8051: LABORATORY - Experiment 5Document12 pages7-Segment Display & ADC Controls With 8051: LABORATORY - Experiment 5Vikas Ravi TPNo ratings yet
- ESD User Handbook Rev2Document12 pagesESD User Handbook Rev2Amit B Kolekar100% (1)
- ADC InterfacingDocument37 pagesADC InterfacingSaurav ChaudharyNo ratings yet
- Traffic LightDocument1 pageTraffic LightpulkitNo ratings yet
- A Simple PWM Circuit Based On The 555 TimerDocument5 pagesA Simple PWM Circuit Based On The 555 TimerAmit B KolekarNo ratings yet
- Ratner - Nanotechnology - A Gentle Introduction To The Next Big IdeaDocument153 pagesRatner - Nanotechnology - A Gentle Introduction To The Next Big IdeaKo NwayNo ratings yet
- 12 EE362L H Bridge Inverter Spring 2009Document13 pages12 EE362L H Bridge Inverter Spring 2009Rommel RosillonNo ratings yet
- Pulsed CWCCWMotor DRDocument1 pagePulsed CWCCWMotor DRAmit B KolekarNo ratings yet
- Grade 10 Ict NoteDocument6 pagesGrade 10 Ict Noteslewi3690No ratings yet
- AN12327Document15 pagesAN12327Faris FarisNo ratings yet
- This Study Resource Was: EC-2 Regular Sample SolutionsDocument3 pagesThis Study Resource Was: EC-2 Regular Sample SolutionsRajesh BhardwajNo ratings yet
- Flash Memory: Secure Your BusinessDocument3 pagesFlash Memory: Secure Your BusinessNaod ZerihunNo ratings yet
- DE2i-150 FPGA System ManualDocument110 pagesDE2i-150 FPGA System ManualhiperboreoatlantecNo ratings yet
- Memory Hierarchy - CachesDocument51 pagesMemory Hierarchy - CachesAmanda Judy AndradeNo ratings yet
- GE Energy: Digital Signal Processor Control Board IS200DSPXH - A - DDocument20 pagesGE Energy: Digital Signal Processor Control Board IS200DSPXH - A - DFathi YahyaouiNo ratings yet
- CAT28C256: 32K-Bit Parallel E PromDocument10 pagesCAT28C256: 32K-Bit Parallel E PromAhmed AlsheikhNo ratings yet
- MT6572 Android ScatterDocument5 pagesMT6572 Android ScatterO'om Fearless RahmanNo ratings yet
- AN127Document31 pagesAN127Anonymous B1gdy1j5No ratings yet
- Flash Recovery Area - FAQ (Doc ID 833663.1)Document3 pagesFlash Recovery Area - FAQ (Doc ID 833663.1)Prakash SNo ratings yet
- 70 Series Maintenance Training ManualDocument299 pages70 Series Maintenance Training ManualAntonio LucasNo ratings yet
- MG84FG516 DataSheet A1.3 PDFDocument231 pagesMG84FG516 DataSheet A1.3 PDFpiyushpandeyNo ratings yet
- Amlogic Platform USB Burning Tool V2 User Guide V1.0Document32 pagesAmlogic Platform USB Burning Tool V2 User Guide V1.0Allandtyno Aby Wiguna100% (1)
- LESSON 1 A World of ComputersDocument6 pagesLESSON 1 A World of ComputersREVILLAS, IVAN A.No ratings yet
- SEMI-Yole Webinar 10.26.17Document52 pagesSEMI-Yole Webinar 10.26.17José Daniel Hernández SánchezNo ratings yet
- 15 DifferentiatorsDocument48 pages15 Differentiatorsjagdish joshiNo ratings yet
- First Generation of Hmi Catalog enDocument20 pagesFirst Generation of Hmi Catalog enMadhun SickNo ratings yet
- GFK2123RDocument11 pagesGFK2123Rxmass84No ratings yet
- DatasheetDocument62 pagesDatasheetMoazh TawabNo ratings yet
- BreezeCONFIG ACCESS Ver 4.3-030326 User GuideDocument112 pagesBreezeCONFIG ACCESS Ver 4.3-030326 User GuideMadaleno Pedro Vicente DalúNo ratings yet
- Macronix MX25L12835FZ2I 10G Datasheet PDFDocument102 pagesMacronix MX25L12835FZ2I 10G Datasheet PDFDuban Aragon FerrerNo ratings yet
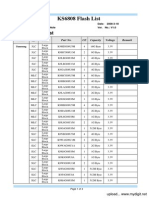
- KS6808 Flash ListDocument4 pagesKS6808 Flash ListopcrisNo ratings yet
- Atto Silicondisk™ Ram-Based Storage Appliance: Extremely Low Latency Storage For 100gbe Enterprise Fabric ArchitecturesDocument2 pagesAtto Silicondisk™ Ram-Based Storage Appliance: Extremely Low Latency Storage For 100gbe Enterprise Fabric ArchitecturesMONICA LOHNo ratings yet
- II Unit 12Document1 pageII Unit 12адміністратор Wake Up SchoolNo ratings yet
- Micrologix 1200 and 1500 Programmable Controllers Firmware UpgradeDocument12 pagesMicrologix 1200 and 1500 Programmable Controllers Firmware UpgradeDerry TannamaNo ratings yet
- Reference Guide: TMS320F2802x/TMS320F2802xx Piccolo System Control and InterruptsDocument139 pagesReference Guide: TMS320F2802x/TMS320F2802xx Piccolo System Control and InterruptsBertony QuemasdaNo ratings yet
- A. Lun Move StartDocument22 pagesA. Lun Move StartHudan RamadhonaNo ratings yet
- ImageRUNNER IR330, IR400 Manual de ReparacionDocument198 pagesImageRUNNER IR330, IR400 Manual de ReparacionJosueNo ratings yet
- Welcome to the United States of Anxiety: Observations from a Reforming NeuroticFrom EverandWelcome to the United States of Anxiety: Observations from a Reforming NeuroticRating: 3.5 out of 5 stars3.5/5 (10)
- You Can't Joke About That: Why Everything Is Funny, Nothing Is Sacred, and We're All in This TogetherFrom EverandYou Can't Joke About That: Why Everything Is Funny, Nothing Is Sacred, and We're All in This TogetherNo ratings yet
- The House at Pooh Corner - Winnie-the-Pooh Book #4 - UnabridgedFrom EverandThe House at Pooh Corner - Winnie-the-Pooh Book #4 - UnabridgedRating: 4.5 out of 5 stars4.5/5 (5)
- Pickup Lines: The Ultimate Collection of the World's Best Pickup Lines!From EverandPickup Lines: The Ultimate Collection of the World's Best Pickup Lines!Rating: 5 out of 5 stars5/5 (1)
- The Importance of Being Earnest: Classic Tales EditionFrom EverandThe Importance of Being Earnest: Classic Tales EditionRating: 4.5 out of 5 stars4.5/5 (44)
- My Man, Jeeves, The Inimitable Jeeves and Right Ho, Jeeves - THREE P.G. Wodehouse Classics! - UnabridgedFrom EverandMy Man, Jeeves, The Inimitable Jeeves and Right Ho, Jeeves - THREE P.G. Wodehouse Classics! - UnabridgedNo ratings yet
- The Inimitable Jeeves [Classic Tales Edition]From EverandThe Inimitable Jeeves [Classic Tales Edition]Rating: 5 out of 5 stars5/5 (3)
- The Most Forbidden Knowledge: 151 Things NO ONE Should Know How to DoFrom EverandThe Most Forbidden Knowledge: 151 Things NO ONE Should Know How to DoRating: 4.5 out of 5 stars4.5/5 (6)
- Travel: The Worst-Case Scenario Survival Handbook: How to Survive Runaway Camels, UFO Abductions, High-Rise Hotel Fires, LeechesFrom EverandTravel: The Worst-Case Scenario Survival Handbook: How to Survive Runaway Camels, UFO Abductions, High-Rise Hotel Fires, LeechesRating: 3.5 out of 5 stars3.5/5 (126)
- Sex, Drugs, and Cocoa Puffs: A Low Culture ManifestoFrom EverandSex, Drugs, and Cocoa Puffs: A Low Culture ManifestoRating: 3.5 out of 5 stars3.5/5 (1428)
- The Comedians in Cars Getting Coffee BookFrom EverandThe Comedians in Cars Getting Coffee BookRating: 4.5 out of 5 stars4.5/5 (8)
- The Smartest Book in the World: A Lexicon of Literacy, A Rancorous Reportage, A Concise Curriculum of CoolFrom EverandThe Smartest Book in the World: A Lexicon of Literacy, A Rancorous Reportage, A Concise Curriculum of CoolRating: 4 out of 5 stars4/5 (14)
- The Humor Code: A Global Search for What Makes Things FunnyFrom EverandThe Humor Code: A Global Search for What Makes Things FunnyRating: 3.5 out of 5 stars3.5/5 (10)
- What I Was Doing While You Were Breeding: A MemoirFrom EverandWhat I Was Doing While You Were Breeding: A MemoirRating: 4 out of 5 stars4/5 (117)