You might also like
- Tti Qpx1200 Service Manual - Version 2 - Full VersionDocument50 pagesTti Qpx1200 Service Manual - Version 2 - Full VersiononafetsNo ratings yet
- Spezifikation HALA TPC Z PCDocument2 pagesSpezifikation HALA TPC Z PConafetsNo ratings yet
- Il 71 XDocument18 pagesIl 71 XonafetsNo ratings yet
- Choosing Rack Type, Size, and Power Distribution UnitDocument12 pagesChoosing Rack Type, Size, and Power Distribution UnitonafetsNo ratings yet
- Ixis CS8 08io2Document3 pagesIxis CS8 08io2onafetsNo ratings yet
- BSP C PDFDocument2 pagesBSP C PDFonafetsNo ratings yet
- Stm32f4xx Tim HDocument22 pagesStm32f4xx Tim HonafetsNo ratings yet
- Choosing Power Supply PDFDocument8 pagesChoosing Power Supply PDFonafetsNo ratings yet
- Deploying The Test System PDFDocument6 pagesDeploying The Test System PDFonafetsNo ratings yet
- Define To Prevent Recursive InclusionDocument9 pagesDefine To Prevent Recursive InclusiononafetsNo ratings yet
- MT 076Document9 pagesMT 076onafetsNo ratings yet
- XMC 2go Write Your First Program GuideDocument16 pagesXMC 2go Write Your First Program GuideonafetsNo ratings yet
- Stmpe811qtr CDocument23 pagesStmpe811qtr ConafetsNo ratings yet
- sc23 12io2 PDFDocument3 pagessc23 12io2 PDFonafetsNo ratings yet
- Stm32f4xx Tim CDocument60 pagesStm32f4xx Tim ConafetsNo ratings yet
- Safety Integrity LevelDocument5 pagesSafety Integrity Levelonafets100% (1)
- Inductors (Coils) : For General Signals/DecouplingDocument34 pagesInductors (Coils) : For General Signals/DecouplingonafetsNo ratings yet
- XMC2Go Initial Start Up GuideDocument11 pagesXMC2Go Initial Start Up GuideonafetsNo ratings yet
- SDR0604 Series - SMD Power Inductors: Features ApplicationsDocument2 pagesSDR0604 Series - SMD Power Inductors: Features ApplicationsonafetsNo ratings yet
- Terminal Blocks: ElectronicsDocument20 pagesTerminal Blocks: ElectronicsonafetsNo ratings yet
- Terminal Blocks: ElectronicsDocument20 pagesTerminal Blocks: ElectronicsonafetsNo ratings yet
- NPIS Shielded Power InductorsDocument11 pagesNPIS Shielded Power InductorsonafetsNo ratings yet
- PDM: Rev:P ReleasedDocument2 pagesPDM: Rev:P ReleasedonafetsNo ratings yet
- SMD SMD SMD SMD Power Inductor Power Inductor Power Inductor Power Inductor CDRH127Document6 pagesSMD SMD SMD SMD Power Inductor Power Inductor Power Inductor Power Inductor CDRH127onafetsNo ratings yet
- RMCF1206JT1K00Document3 pagesRMCF1206JT1K00onafetsNo ratings yet
- RMCF1206JT1K00Document3 pagesRMCF1206JT1K00onafetsNo ratings yet
- IRF840Document9 pagesIRF840onafetsNo ratings yet
- RMCF1206JT1K00Document3 pagesRMCF1206JT1K00onafetsNo ratings yet
- License MlaDocument2 pagesLicense MlaonafetsNo ratings yet
- CSR1 20.5fict-NdDocument6 pagesCSR1 20.5fict-NdonafetsNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Test ImprimantaDocument2 pagesTest ImprimantaEduard EdyNo ratings yet
- Directory and Disk Structure: Presented byDocument16 pagesDirectory and Disk Structure: Presented byabdulbarimalikNo ratings yet
- Installing System Devices: Power, Cooling, and StorageDocument49 pagesInstalling System Devices: Power, Cooling, and StorageLinda BurgNo ratings yet
- Dumpstate 2021 03 23 19 06 23 Dumpstate - Log 9427Document20 pagesDumpstate 2021 03 23 19 06 23 Dumpstate - Log 9427Lucaci Raul100% (1)
- Piping & Instrumentation Diagrams AdvancedDocument21 pagesPiping & Instrumentation Diagrams AdvancedaeroamirNo ratings yet
- Wireless LANDocument20 pagesWireless LANsubra2685% (13)
- Featuring Scalable Vector GraphicsDocument69 pagesFeaturing Scalable Vector Graphicsmarinum7No ratings yet
- NetBurnerPcTools PDFDocument33 pagesNetBurnerPcTools PDFflo72afNo ratings yet
- Establish JDBC Connectivity Using Mysql, Eclipse, SQL ExplorerDocument19 pagesEstablish JDBC Connectivity Using Mysql, Eclipse, SQL ExplorerSandipan Roy ChowdhuryNo ratings yet
- 9.2 Update 2 Special InstructionsDocument30 pages9.2 Update 2 Special InstructionsAdil AhmadNo ratings yet
- Ntfs 3g AdvancedDocument2 pagesNtfs 3g AdvancedVIC RODNo ratings yet
- Outfd $2Document28 pagesOutfd $2tristan keeNo ratings yet
- Open The DorDocument9 pagesOpen The Dorgumaj hostguru topNo ratings yet
- (WWW - Entrance-Exam - Net) - IETE AMIETE-ET (Old Scheme) Digital Communications Sample Paper 2Document4 pages(WWW - Entrance-Exam - Net) - IETE AMIETE-ET (Old Scheme) Digital Communications Sample Paper 2m_bhaskarkNo ratings yet
- Message TextDocument212 pagesMessage TextCarlos OviedoNo ratings yet
- POSTECH DP&NM Lab ASN.1 & BER OverviewDocument27 pagesPOSTECH DP&NM Lab ASN.1 & BER OverviewGeoffrey Benette D AngNo ratings yet
- Andhra University SyllabusDocument59 pagesAndhra University SyllabusKalikumarNo ratings yet
- Vba Developer: Operationit Client Parsippany, NJ 07054 UsaDocument3 pagesVba Developer: Operationit Client Parsippany, NJ 07054 UsaYury ArfielNo ratings yet
- 8.1.5.2 Adras Pcmcia Cards and Compact Flash Cards HandlingDocument19 pages8.1.5.2 Adras Pcmcia Cards and Compact Flash Cards HandlingMICHAEL AYELENo ratings yet
- Data Communication and Computer Networks ProjectDocument5 pagesData Communication and Computer Networks ProjectJunaid Hashmat (CR)No ratings yet
- 3rd Year Even: Routine & SyllabusDocument5 pages3rd Year Even: Routine & SyllabusIfat NixNo ratings yet
- MB MS-7204Document36 pagesMB MS-7204fabiluxNo ratings yet
- (SPC) Oracle Exadata 운영자교육 v1.3Document167 pages(SPC) Oracle Exadata 운영자교육 v1.3:D밍갱No ratings yet
- Introduction to The Sleuth Kit (TSK) Forensic ToolsDocument20 pagesIntroduction to The Sleuth Kit (TSK) Forensic ToolsMauricio DelgadoNo ratings yet
- Jeru The Damaja Featuring Miz Marvel - 99.9 Percent-Webrip-x264-2010-CeasPDocument1 pageJeru The Damaja Featuring Miz Marvel - 99.9 Percent-Webrip-x264-2010-CeasPceaspNo ratings yet
- Extending SaltStack - Sample ChapterDocument15 pagesExtending SaltStack - Sample ChapterPackt PublishingNo ratings yet
- Write A Numpy Program To Reverse An Array (First Element Becomes Last)Document8 pagesWrite A Numpy Program To Reverse An Array (First Element Becomes Last)Wodari HelenaNo ratings yet
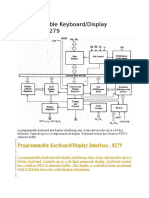
- Programmable Keyboard/Display Interface - 8279Document10 pagesProgrammable Keyboard/Display Interface - 8279prashantvlsiNo ratings yet
- DSS8840Document53 pagesDSS8840sts100No ratings yet
- 29 Mysql Interview Questions: Tasks You Accomplished With These ToolsDocument2 pages29 Mysql Interview Questions: Tasks You Accomplished With These ToolsMehedi HasanNo ratings yet