You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- State The Contents of The Chart 5500Document1 pageState The Contents of The Chart 5500shivajinarvekar100% (2)
- Naval ArchitectureDocument79 pagesNaval ArchitectureRENGANATHAN PNo ratings yet
- Guidelines For Marine Operations LOCDocument172 pagesGuidelines For Marine Operations LOCbeegmacNo ratings yet
- Unit 1 INTRODUCTION 1.1.introduction 1.2.objectives PDFDocument341 pagesUnit 1 INTRODUCTION 1.1.introduction 1.2.objectives PDFtoshugo100% (1)
- (3 Marks) : CIVE2010 Introduction To Water EngineeringDocument7 pages(3 Marks) : CIVE2010 Introduction To Water EngineeringtoshugoNo ratings yet
- Prog0101 CH06Document16 pagesProg0101 CH06toshugoNo ratings yet
- Dry Dock PlanDocument1 pageDry Dock PlantoshugoNo ratings yet
- Answers1 PDFDocument4 pagesAnswers1 PDFtoshugoNo ratings yet
- 4011 Midterm Exam 2010Document2 pages4011 Midterm Exam 2010toshugoNo ratings yet
- ME303 7 Head Loss 2 BranchedDocument39 pagesME303 7 Head Loss 2 BranchedtoshugoNo ratings yet
- Nautical Terms For The Model Ship BuilderDocument85 pagesNautical Terms For The Model Ship BuilderemmdmkNo ratings yet
- MAE 455 Computer-Aided Design and Drafting Lab Instructions TUTORIAL 3: Advanced SketchingDocument1 pageMAE 455 Computer-Aided Design and Drafting Lab Instructions TUTORIAL 3: Advanced SketchingtoshugoNo ratings yet
- Dock Pump - KSBDocument2 pagesDock Pump - KSBtoshugoNo ratings yet
- Bollard RequirementDocument2 pagesBollard RequirementCaptIsqan100% (1)
- Brodogradnja Plastikom PDFDocument64 pagesBrodogradnja Plastikom PDFtoshugoNo ratings yet
- Stress ShipDocument14 pagesStress Shiptoshugo100% (1)
- Bollard RequirementDocument2 pagesBollard RequirementCaptIsqan100% (1)
- Ejercicios Solidworks PDFDocument50 pagesEjercicios Solidworks PDFRic Frs80% (5)
- Ejercicios Solidworks PDFDocument50 pagesEjercicios Solidworks PDFRic Frs80% (5)
- Lecture 12 Assembly ModelingDocument5 pagesLecture 12 Assembly ModelingtoshugoNo ratings yet
- Product Data Management: Purpose of PDM SoftwareDocument7 pagesProduct Data Management: Purpose of PDM SoftwaretoshugoNo ratings yet
- MAE 455 Computer-Aided Design and Drafting Lab Instructions TUTORIAL 4: Parametric Expressions and Creating DrawingsDocument1 pageMAE 455 Computer-Aided Design and Drafting Lab Instructions TUTORIAL 4: Parametric Expressions and Creating DrawingstoshugoNo ratings yet
- Using Vendor E-Catalogs: Identifying Needed Components & Obtaining Component Model FilesDocument2 pagesUsing Vendor E-Catalogs: Identifying Needed Components & Obtaining Component Model FilestoshugoNo ratings yet
- CAD Data Formats: Exchanging Data Between SystemsDocument4 pagesCAD Data Formats: Exchanging Data Between SystemstoshugoNo ratings yet
- MAE 455 Computer-Aided Design and Drafting Lab Instructions TUTORIAL 4: Parametric Expressions and Creating DrawingsDocument1 pageMAE 455 Computer-Aided Design and Drafting Lab Instructions TUTORIAL 4: Parametric Expressions and Creating DrawingstoshugoNo ratings yet
- Lecture 11 Solid RepresentationsDocument6 pagesLecture 11 Solid RepresentationstoshugoNo ratings yet
- Mae 455 Computer-Aided Design and Drafting Lab Instructions Tutorial 1: Introduction To SolidworksDocument1 pageMae 455 Computer-Aided Design and Drafting Lab Instructions Tutorial 1: Introduction To SolidworkstoshugoNo ratings yet
- SW Whats New-Ds 2013Document2 pagesSW Whats New-Ds 2013toshugoNo ratings yet
- MAE 455 Computer-Aided Design and Drafting Lab Instructions TUTORIAL 5: Assembly ModelingDocument1 pageMAE 455 Computer-Aided Design and Drafting Lab Instructions TUTORIAL 5: Assembly ModelingtoshugoNo ratings yet
- Lecture 2 SolidWorks IntroDocument7 pagesLecture 2 SolidWorks IntrotoshugoNo ratings yet
- Lecture 3 Geometric ModelingDocument14 pagesLecture 3 Geometric ModelingtoshugoNo ratings yet
- Gerke Chapter 9Document2 pagesGerke Chapter 9toshugoNo ratings yet
- فهرست گواهینامه ها و مدارک مورد نیاز کشتیDocument10 pagesفهرست گواهینامه ها و مدارک مورد نیاز کشتیfajee_faridNo ratings yet
- Daily Noon Report at Port / Anchorage: Alphard Maritime Pte LTDDocument2 pagesDaily Noon Report at Port / Anchorage: Alphard Maritime Pte LTDdede SinbadNo ratings yet
- M/V Norsky: - Member of Spliethoff GroupDocument2 pagesM/V Norsky: - Member of Spliethoff Groupyoony beautyNo ratings yet
- The Ship Design ProcessDocument40 pagesThe Ship Design ProcessaghowelNo ratings yet
- Envelop Protective Covers For Bridge and Navigation EquipmentDocument2 pagesEnvelop Protective Covers For Bridge and Navigation EquipmentronhuttonNo ratings yet
- KR Notation Guide 2017 (E) - 1Document198 pagesKR Notation Guide 2017 (E) - 1황교민No ratings yet
- Main Deck: Kondisi Lapangan: Cuaca: Man Power: Berikut Laporan HariDocument5 pagesMain Deck: Kondisi Lapangan: Cuaca: Man Power: Berikut Laporan Hariaditya kristantoNo ratings yet
- TitanicDocument9 pagesTitanicWilda Nurul JannahNo ratings yet
- Function: Controlling The Operation of The Ship & Care For Persons On Board at Management LevelDocument3 pagesFunction: Controlling The Operation of The Ship & Care For Persons On Board at Management LevelJohn MithuNo ratings yet
- Latihatn Uad Ant III 30Document3 pagesLatihatn Uad Ant III 30LarasAyuNo ratings yet
- Class 4 Safety Oral Ship Construction & Naval FileDocument72 pagesClass 4 Safety Oral Ship Construction & Naval Fileclinton100% (4)
- Titantic QuestionsDocument3 pagesTitantic Questionsapi-265848273No ratings yet
- Casualty Report Form: VDR Preserved YESDocument4 pagesCasualty Report Form: VDR Preserved YESKumara Raj K RamanNo ratings yet
- 10.1.1.476.5960-Fsa Cruise ShipsDocument17 pages10.1.1.476.5960-Fsa Cruise ShipsJay Jay0% (1)
- Abdel Magid Mohamed Abdel Magid Abdel Rahman 2nd EngDocument4 pagesAbdel Magid Mohamed Abdel Magid Abdel Rahman 2nd Engsasadanger6604No ratings yet
- Beneteau 50 Owner's ManualDocument43 pagesBeneteau 50 Owner's ManualGrife Moda PraiaNo ratings yet
- Safety of Life at SeaDocument5 pagesSafety of Life at SeaAbdel Nasser Al-sheikh YousefNo ratings yet
- 2.NMD No.1523 of 2011-12-22 - Qualifications and Certificates For SeafarersDocument41 pages2.NMD No.1523 of 2011-12-22 - Qualifications and Certificates For SeafarersThomas C. LaneNo ratings yet
- History MAJOR Oil SpillsDocument4 pagesHistory MAJOR Oil Spillsapi-26251207No ratings yet
- v2 Training Schedule For Sailing ProgramDocument3 pagesv2 Training Schedule For Sailing ProgramKrizette CasibangNo ratings yet
- Brief Spesification Passengers 42MDocument5 pagesBrief Spesification Passengers 42MBambang Irawan GintingNo ratings yet
- Time SheetDocument2 pagesTime SheetfaizNo ratings yet
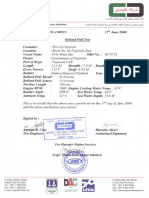
- 12 Bollard Pull Test CertificateDocument1 page12 Bollard Pull Test CertificateMaan MrabetNo ratings yet
- WP-Report On Hull Technical Assessment During Visit W46Document2 pagesWP-Report On Hull Technical Assessment During Visit W46ion negNo ratings yet
- 5150 - Star Marine - Star Marines OrganizationDocument3 pages5150 - Star Marine - Star Marines OrganizationJohn CunninghamNo ratings yet
- Brochure OOS Gretha REV2.1 PDFDocument4 pagesBrochure OOS Gretha REV2.1 PDFVovchenko AlexandrNo ratings yet
- The Fleets at The Battle of Beachy HeadDocument14 pagesThe Fleets at The Battle of Beachy HeadRazvan LipanNo ratings yet
- AMSA - BULLETIN Thinking - Mooring SafetyDocument4 pagesAMSA - BULLETIN Thinking - Mooring SafetyVesa MihaiNo ratings yet