You might also like
- Trabajo Práctico N 4: Péndulo de VarillaDocument6 pagesTrabajo Práctico N 4: Péndulo de VarillaCandela BaccoNo ratings yet
- Acustica I-IDocument12 pagesAcustica I-IFabian OjedaNo ratings yet
- Taller Final Metodos ComputacionalesDocument14 pagesTaller Final Metodos ComputacionalesandreastefanniaNo ratings yet
- Modelo de Regresion Lineal General 2Document22 pagesModelo de Regresion Lineal General 2marielaramirezparraNo ratings yet
- Problemas de Aplicación Medición y ErrorDocument6 pagesProblemas de Aplicación Medición y ErrorBrayan JulianNo ratings yet
- Cuantificacion PDFDocument7 pagesCuantificacion PDFGian Paolo UccellettiNo ratings yet
- Adaptador Stub SimpleDocument4 pagesAdaptador Stub SimpleIvan RojasNo ratings yet
- Ensayo U4Document14 pagesEnsayo U4Luis Antonio Barboza AlvaradoNo ratings yet
- Capítulo 3: Normativa de Aplicación para Las MedidasDocument13 pagesCapítulo 3: Normativa de Aplicación para Las MedidaserlanrojasNo ratings yet
- Respuesta en FrecuenciaDocument10 pagesRespuesta en Frecuenciacarlos maldonadoNo ratings yet
- Ajustes Por Minimos CuadradosDocument5 pagesAjustes Por Minimos CuadradosAntonio RamirezNo ratings yet
- ConvertidoresDocument12 pagesConvertidoresYalvany Rodriguez ViverosNo ratings yet
- SimulacionDocument7 pagesSimulacionJuan GonzálezNo ratings yet
- 3 09 IncertidumbreDocument45 pages3 09 IncertidumbreMari ChrNo ratings yet
- Pendulo SimpleDocument18 pagesPendulo SimplePaola Andrea100% (1)
- Uso e Interpretación Del Diagrama de MoodyDocument6 pagesUso e Interpretación Del Diagrama de MoodyCLAUDIO100% (1)
- CALCULO DE INCERTIDUMBRE Aplicando La Ley de Ohm CENAM PDFDocument5 pagesCALCULO DE INCERTIDUMBRE Aplicando La Ley de Ohm CENAM PDFaalvarez8912No ratings yet
- Teoria de La Medicion y Los ErroresDocument26 pagesTeoria de La Medicion y Los ErroresRaúl AguilarNo ratings yet
- PC1 ML 313 2022-2Document6 pagesPC1 ML 313 2022-2Cesar Zavaleta Ramírez100% (1)
- INCERTIDUMBREDocument4 pagesINCERTIDUMBRERAGNo ratings yet
- Ejemplo de Aplicación para El Cálculo de La Incertidumbre Asociado A La Medición de Niveles SonorosDocument4 pagesEjemplo de Aplicación para El Cálculo de La Incertidumbre Asociado A La Medición de Niveles SonorosAndres AbantoNo ratings yet
- Radiancia y ReflectanciaDocument4 pagesRadiancia y ReflectanciaOscar Lemus Ramírez100% (2)
- 2 Ejercicios Resuelt 8423 Downloadable 2002534Document36 pages2 Ejercicios Resuelt 8423 Downloadable 2002534OMAR GABRIEL CHAVEZ ARAMBULONo ratings yet
- Relacion Entre Codificacion y ModulacionDocument8 pagesRelacion Entre Codificacion y Modulacionmajmax3No ratings yet
- Acciones Basicas PIDDocument8 pagesAcciones Basicas PIDOriana MedinaNo ratings yet
- Ataurima-Arellano M. - Implementación en MATLAB Del Método de Estimación Por Mínimos Cuadrados Ordinarios PDFDocument14 pagesAtaurima-Arellano M. - Implementación en MATLAB Del Método de Estimación Por Mínimos Cuadrados Ordinarios PDFMiguel Ataurima ArellanoNo ratings yet
- Am FM EjerciciosDocument4 pagesAm FM EjerciciosjucorueNo ratings yet
- 4.-Problemas Resueltos Sobre Ad y Da - SeminarioDocument10 pages4.-Problemas Resueltos Sobre Ad y Da - SeminarioCesar Mario Paredes MezaNo ratings yet
- Trabajo Estadística (Evaluación 03)Document16 pagesTrabajo Estadística (Evaluación 03)alfonso_benitez_1100% (1)
- Densidad de Sólidos y LíquidosDocument8 pagesDensidad de Sólidos y LíquidosRey Francisco V. CalvoNo ratings yet
- Introducción A La Respuesta de FrecuenciaDocument14 pagesIntroducción A La Respuesta de FrecuenciaMePerdi PeroGracias PorEncontrarmeNo ratings yet
- Qué Es Un DBDocument8 pagesQué Es Un DBDilan Jauregui SanchezNo ratings yet
- Tarea 1 - Análisis de SeñalesDocument6 pagesTarea 1 - Análisis de SeñalesVivian García MacíasNo ratings yet
- INCERTIDUMBREDocument6 pagesINCERTIDUMBRERAGNo ratings yet
- LinealizacionDocument8 pagesLinealizacionDiego SanchezNo ratings yet
- Marco Teórico e Instrumentación Actualizado Con RespuestasDocument28 pagesMarco Teórico e Instrumentación Actualizado Con RespuestasNiightWiish0% (1)
- Estudio de La Relación Entre La Frecuencia y La Longitud de Onda en Una Onda SonoraDocument7 pagesEstudio de La Relación Entre La Frecuencia y La Longitud de Onda en Una Onda SonoraGuillermo DíazNo ratings yet
- Ecualizador IsiDocument13 pagesEcualizador IsiAriel Zambrano CseNo ratings yet
- Diagrama de .Boode y Criterio - NyquistDocument20 pagesDiagrama de .Boode y Criterio - NyquistdiegolaglaNo ratings yet
- Gases de EscapeDocument30 pagesGases de EscapeLuis Emilio Alfonso GilNo ratings yet
- Cortinas Flexibles, Cortinas RigidazDocument44 pagesCortinas Flexibles, Cortinas RigidazjoseluisdiproNo ratings yet
- Boylestad Capitulo 11Document51 pagesBoylestad Capitulo 11Jose_R_VelasquezNo ratings yet
- Sistema de Control 1 Labo 5Document9 pagesSistema de Control 1 Labo 5Iván Fernando Mayorga HilarioNo ratings yet
- Magnitudes y Unidades Empleadas en Los Sistemas de Telecomunicaciones.Document11 pagesMagnitudes y Unidades Empleadas en Los Sistemas de Telecomunicaciones.Marcelo FélixNo ratings yet
- Control DifusoDocument21 pagesControl DifusoBleyder Andres Guzman BeleñoNo ratings yet
- Resultados y Análisis de ResultadosDocument5 pagesResultados y Análisis de ResultadosBRAYAN HARLEY CORTES TOBARNo ratings yet
- Tema 10 Regresion SesgadaDocument30 pagesTema 10 Regresion SesgadaJimyhms Melgarejo SeguraNo ratings yet
- T2 Taller Preparatorio M2 Sist Com 1sem2023Document13 pagesT2 Taller Preparatorio M2 Sist Com 1sem2023Camilo FigueroaNo ratings yet
- Ejercicio Analisis Prueba de BombeoDocument7 pagesEjercicio Analisis Prueba de BombeoDaniel QuijanoNo ratings yet
- Practica RefractometriaDocument6 pagesPractica RefractometriaDW DWNo ratings yet
- Ley de CoulombDocument7 pagesLey de CoulombGuillermoManNo ratings yet
- Tarea Ing de Control LINEALIZACIONDocument6 pagesTarea Ing de Control LINEALIZACIONmoises lira alvaradoNo ratings yet
- Diagrama de Bode U-IV 23Document24 pagesDiagrama de Bode U-IV 23SalimNo ratings yet
- Redes de TuberiasDocument36 pagesRedes de TuberiasDiegohl13No ratings yet
- Guía para El Cálculo Del Emisión de RuidoDocument2 pagesGuía para El Cálculo Del Emisión de RuidoIkaiPonkNo ratings yet
- Analisis Serie de Tiempo - Flores - Santillan - Salvador - 2008 - 2Document107 pagesAnalisis Serie de Tiempo - Flores - Santillan - Salvador - 2008 - 2mcr_bkn0% (1)
- AFOROSDocument68 pagesAFOROSJhon Jaime Cardenas MonsalveNo ratings yet
- RD 20 2011 MTC 14Document222 pagesRD 20 2011 MTC 14Oscar CcamaNo ratings yet
- Introducción A La Hidráulica Fluvial - ARTURO ROCHA FELICESDocument285 pagesIntroducción A La Hidráulica Fluvial - ARTURO ROCHA FELICESWmq Wmq100% (5)
- Modelos MatematicosDocument80 pagesModelos MatematicosJhon Jaime Cardenas MonsalveNo ratings yet
- Iluminación de TunelesDocument28 pagesIluminación de TunelesDonald Santana BautistaNo ratings yet
- Resolución 2153 de 2010. Protocolo de Fuentes Fijas.Document99 pagesResolución 2153 de 2010. Protocolo de Fuentes Fijas.AndresFernandoCruzCocaNo ratings yet
- AcustiplacaDocument2 pagesAcustiplacaJhon Jaime Cardenas MonsalveNo ratings yet
- Resolución 0634 de 2006Document44 pagesResolución 0634 de 2006Jhon Jaime Cardenas MonsalveNo ratings yet
- Diagrama para Muestreo IsocineticoDocument23 pagesDiagrama para Muestreo IsocineticoJhon Jaime Cardenas MonsalveNo ratings yet
- Mineria FolletoDocument16 pagesMineria FolletoJhon Jaime Cardenas MonsalveNo ratings yet
- Proyecto Feria de La Ciencia (Cilantro)Document13 pagesProyecto Feria de La Ciencia (Cilantro)Natasha CollinsNo ratings yet
- Apuntes ElectromagnetismoDocument9 pagesApuntes ElectromagnetismoEfraín de la CruzNo ratings yet
- Calculos de CementacionDocument10 pagesCalculos de CementacionyelimarquezNo ratings yet
- Teoría de Mecanizado 2018 PDFDocument45 pagesTeoría de Mecanizado 2018 PDFDante Alaniz100% (1)
- Ejercicio de Analitica I.Document4 pagesEjercicio de Analitica I.Danna MuñozNo ratings yet
- Drenaje Vial, Alcantarillas, Cajón de PasoDocument61 pagesDrenaje Vial, Alcantarillas, Cajón de Pasojk dednysNo ratings yet
- Guantes de Protección Contra Riesgos Termicos 100ºC EN407Document4 pagesGuantes de Protección Contra Riesgos Termicos 100ºC EN407Julio Pablo Garcia DiazNo ratings yet
- Formato de Verificación de Eficacia de Controles CríticosDocument4 pagesFormato de Verificación de Eficacia de Controles Críticosdiego jesusNo ratings yet
- Destajo FormatoDocument4 pagesDestajo FormatoLORENA MARQUEZNo ratings yet
- Practica No 3 Mediciones ElectricasDocument4 pagesPractica No 3 Mediciones ElectricasArmando VillaNo ratings yet
- Practica 5 - Ley de OhmDocument7 pagesPractica 5 - Ley de OhmNICOLE ZULETA MARTINEZNo ratings yet
- Oceanografía Fisica y Estudio Del MarDocument5 pagesOceanografía Fisica y Estudio Del MarFer MedinaNo ratings yet
- Reticula SistemasDocument1 pageReticula SistemasjoshNo ratings yet
- Check List de MantenimientoDocument96 pagesCheck List de MantenimientoMishellyVillegasNo ratings yet
- Electrolisis Del AguaDocument3 pagesElectrolisis Del AguaGaby Reséndiz LiraNo ratings yet
- Materiales de ImpresionDocument41 pagesMateriales de ImpresionVIRIDIANA GALINDO TEJEDANo ratings yet
- Astilladora BC1500: Manual de MantenimientoDocument146 pagesAstilladora BC1500: Manual de MantenimientoFlavio MurciaNo ratings yet
- Transmision ZFDocument22 pagesTransmision ZFMario Cortéz0% (1)
- Trabajo Campo - 2 SolucionarioDocument4 pagesTrabajo Campo - 2 SolucionarioExams 1997No ratings yet
- Economia Instalacion y Durabilidad en Sistemas de SaneamientoDocument1 pageEconomia Instalacion y Durabilidad en Sistemas de SaneamientoMauricioNo ratings yet
- 2-Tipos de Redes Peer To PeerDocument35 pages2-Tipos de Redes Peer To PeermelsumNo ratings yet
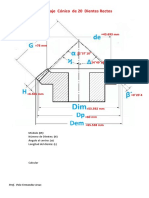
- Engranaje Cónico de 20 Dientes Recto1Document2 pagesEngranaje Cónico de 20 Dientes Recto1Jesus Polo FernandezNo ratings yet
- Especificaciones Tecnicas Inst Electricas ChachacomayocDocument26 pagesEspecificaciones Tecnicas Inst Electricas ChachacomayocChristian Santa Cruz MoraNo ratings yet
- C01 2021 Baterías Adblue SkandipowerDocument11 pagesC01 2021 Baterías Adblue SkandipowerLenin CcoriNo ratings yet
- Ante-Proyecto 1 SemestreDocument6 pagesAnte-Proyecto 1 SemestreJuan Felipe AlvaradoNo ratings yet
- Problem AsDocument3 pagesProblem AsSusana Gutierrez MarceloNo ratings yet
- Cadena de ValorDocument5 pagesCadena de ValorKissy De Las Mercedes Pérez BustamanteNo ratings yet
- Ficha de Práctica Montaje de Dos Lamparas en Serie y Un Enchufe, Humberto Andrez Muñoz Castillo. 1it 22-23Document7 pagesFicha de Práctica Montaje de Dos Lamparas en Serie y Un Enchufe, Humberto Andrez Muñoz Castillo. 1it 22-23Humberto andrez Muñoz CastilloNo ratings yet
- Formato Inspeccion de Herramienta BUENODocument1 pageFormato Inspeccion de Herramienta BUENOCristina PincheiraNo ratings yet
- Poliamida Pa6Document1 pagePoliamida Pa6gabriel_127971761No ratings yet