You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Terps-Faa Order 8260.3d1Document509 pagesTerps-Faa Order 8260.3d1kmNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- T7 B19 Key 302s FDR - Entire Contents - FBI 302sDocument52 pagesT7 B19 Key 302s FDR - Entire Contents - FBI 302s9/11 Document ArchiveNo ratings yet
- Aviation Security Incident Report 2Document2 pagesAviation Security Incident Report 2Nanda Win LwinNo ratings yet
- Aircraft Operations: Sixth Edition, 2018 Volume I Flight ProceduresDocument210 pagesAircraft Operations: Sixth Edition, 2018 Volume I Flight ProceduresLamonega Milena Rocio100% (2)
- A330 International Procedures PamphletDocument8 pagesA330 International Procedures PamphlettugayyoungNo ratings yet
- PAKISTAN RVSM TRAINING: REDUCED VERTICAL SEPARATION MINIMUMDocument45 pagesPAKISTAN RVSM TRAINING: REDUCED VERTICAL SEPARATION MINIMUMpangolin_79No ratings yet
- Bristol Groundschool VFR Communications Exam 1Document8 pagesBristol Groundschool VFR Communications Exam 1momanbhNo ratings yet
- MANUAL OF AIR TRAFFIC SERVICESDocument721 pagesMANUAL OF AIR TRAFFIC SERVICESAiril Anuar100% (2)
- Air Cadet Gliding Program ManualDocument504 pagesAir Cadet Gliding Program ManualDylan McKenzie100% (1)
- Adf 60Document18 pagesAdf 60Oscar Hermosa GarcesNo ratings yet
- 190-00919-00 - 0G - GPSMAP 695-696, Portable Aviation Receiver, Owner's Manual PDFDocument280 pages190-00919-00 - 0G - GPSMAP 695-696, Portable Aviation Receiver, Owner's Manual PDFOscar Hermosa GarcesNo ratings yet
- Radar and Synthetic Aperture Radar SystemDocument20 pagesRadar and Synthetic Aperture Radar SystemOscar Hermosa GarcesNo ratings yet
- Whar Is TransponderDocument34 pagesWhar Is TransponderOscar Hermosa GarcesNo ratings yet
- TCAS - Traffic Alert and Collision Avoidance SystemDocument10 pagesTCAS - Traffic Alert and Collision Avoidance SystemOscar Hermosa GarcesNo ratings yet
- 618M 3aDocument12 pages618M 3aOscar Hermosa GarcesNo ratings yet
- TCAS Tutorial: Traffic and Collision Avoidance System OverviewDocument39 pagesTCAS Tutorial: Traffic and Collision Avoidance System OverviewOscar Hermosa GarcesNo ratings yet
- Acronym Cheat Sheet For CDM: New in REDDocument5 pagesAcronym Cheat Sheet For CDM: New in REDarthurNo ratings yet
- Iata TemDocument7 pagesIata TemBum Joo KimNo ratings yet
- Airplane Flight Manual Supplement: Gps/Waas Nav ComDocument7 pagesAirplane Flight Manual Supplement: Gps/Waas Nav Comraisul dianaNo ratings yet
- LTCG (Trabzon) R (17sep15) PDF PDFDocument32 pagesLTCG (Trabzon) R (17sep15) PDF PDFnabatman100% (2)
- Jeppview For Windows: List of Pages in This Trip KitDocument15 pagesJeppview For Windows: List of Pages in This Trip Kitagagahg221No ratings yet
- Design of Airways and Traffic SystemDocument133 pagesDesign of Airways and Traffic SystemTomiNo ratings yet
- BRITISH AIRWAYS JeppView Chart for Seoul Incheon AirportDocument21 pagesBRITISH AIRWAYS JeppView Chart for Seoul Incheon AirportAfner OtnielNo ratings yet
- EDDMKBOS PDF 19feb23Document12 pagesEDDMKBOS PDF 19feb23Benoit VoisinNo ratings yet
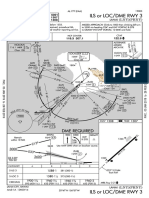
- Ils or Loc/Dme Rwy 3: 111.1 48 Lanai 1308 1307 5001Document1 pageIls or Loc/Dme Rwy 3: 111.1 48 Lanai 1308 1307 5001Elfo ElfoNo ratings yet
- Sco Isan: Spso/Pio Pisco, Peru Ilsyrwy22Document5 pagesSco Isan: Spso/Pio Pisco, Peru Ilsyrwy22Harold DongoNo ratings yet
- Spso CartasDocument5 pagesSpso CartasJorge Adrian Mendoza VargasNo ratings yet
- Jeppview For Windows: List of Pages in This Trip KitDocument23 pagesJeppview For Windows: List of Pages in This Trip KitАлексей ОмскNo ratings yet
- Ils or Loc Rwy18: Apt Elev: Rwy18 THR Elev: Trans Level: Trans AltDocument1 pageIls or Loc Rwy18: Apt Elev: Rwy18 THR Elev: Trans Level: Trans AlttommyNo ratings yet
- Tugas Bahasa Inggris Leason 7Document3 pagesTugas Bahasa Inggris Leason 7Andre caniagoNo ratings yet
- Vidpvqpr PDF 1663422812Document39 pagesVidpvqpr PDF 1663422812Ern PetNo ratings yet
- Reading Practice - Air RageDocument2 pagesReading Practice - Air RageMinh ThiNo ratings yet
- Preliminary Data Show Downward Trend in Controlled-Flight-Into-Terrain Accidents Among Large Western-Built Commercial JetsDocument21 pagesPreliminary Data Show Downward Trend in Controlled-Flight-Into-Terrain Accidents Among Large Western-Built Commercial JetsAnonymous 69rsr6yP7No ratings yet
- News ItemDocument2 pagesNews ItemMulya IstiNo ratings yet
- Radio Telephony For VFR Standard Circuit PatternDocument3 pagesRadio Telephony For VFR Standard Circuit PatternDimas MohammedNo ratings yet
- Logic Puzzle 6Document1 pageLogic Puzzle 6Atul PriyadarshiNo ratings yet
- Flight Attendant Announcements ManualDocument10 pagesFlight Attendant Announcements Manualaaa aaaNo ratings yet