You might also like
- Delucchi - Magic SquaresDocument6 pagesDelucchi - Magic SquaresKatari SreenuNo ratings yet
- Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.002 - Electronic Circuits Fall 2000 Final ExamDocument19 pagesMassachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.002 - Electronic Circuits Fall 2000 Final ExamKatari Sreenu100% (1)
- Cover Page OverheadDocument1 pageCover Page OverheadKatari SreenuNo ratings yet
- Electronics 2011Document17 pagesElectronics 2011srinivas202024030No ratings yet
- UMTSDocument33 pagesUMTSKatari SreenuNo ratings yet
- VRO 2012 Solved Paper (Series-A)Document11 pagesVRO 2012 Solved Paper (Series-A)chandu017No ratings yet
- NW SynthesisDocument1 pageNW SynthesisKatari SreenuNo ratings yet
- Call Processing PDocument7 pagesCall Processing PSarika JhaNo ratings yet
- Call Processing PDocument7 pagesCall Processing PSarika JhaNo ratings yet
- GSM ServicesDocument8 pagesGSM ServicesKatari SreenuNo ratings yet
- Aurabindo 25answersDocument29 pagesAurabindo 25answersKatari SreenuNo ratings yet
- Call Processing in GSMDocument12 pagesCall Processing in GSMscribeddocs100% (1)
- Books RefeDocument19 pagesBooks RefeKatari SreenuNo ratings yet
- GSM Architecture V2Document12 pagesGSM Architecture V2AGupNo ratings yet
- Call Mobility ManagementDocument8 pagesCall Mobility ManagementKatari SreenuNo ratings yet
- GSM BasicsDocument6 pagesGSM BasicsKatari SreenuNo ratings yet
- Linear Circuit AnalysisDocument26 pagesLinear Circuit AnalysisHenrynautNo ratings yet
- Melting Points and Mechanical Properties of Nano MaterialsDocument18 pagesMelting Points and Mechanical Properties of Nano MaterialsKatari SreenuNo ratings yet
- Auto Transformer Energy Conversion 6Document38 pagesAuto Transformer Energy Conversion 6Katari Sreenu100% (1)
- Recent Advances in Display Technologies: Dr. K. R. Sarma Adviser Technology Samtel GroupDocument43 pagesRecent Advances in Display Technologies: Dr. K. R. Sarma Adviser Technology Samtel Groupyadvendra2011No ratings yet
- SymphonyDocument10 pagesSymphonyNavneet SinghNo ratings yet
- 07 HDTVDocument47 pages07 HDTVShashank KaushalNo ratings yet
- HDTV (2) 1Document30 pagesHDTV (2) 1Katari SreenuNo ratings yet
- Linear Circuit AnalysisDocument26 pagesLinear Circuit AnalysisHenrynautNo ratings yet
- Principle of LCD Display: Physics Group Project Group JDocument24 pagesPrinciple of LCD Display: Physics Group Project Group Jskperry8868No ratings yet
- DC Ammeter and Galvanometer OperationDocument14 pagesDC Ammeter and Galvanometer OperationKatari SreenuNo ratings yet
- Module 2Document15 pagesModule 2Katari SreenuNo ratings yet
- Aurabindo 25answersDocument29 pagesAurabindo 25answersKatari SreenuNo ratings yet
- Everything You Need to Know About HDTVDocument15 pagesEverything You Need to Know About HDTVVenkatesh HrNo ratings yet
- Module 6 NANODocument12 pagesModule 6 NANOKatari SreenuNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PC November 2012Document50 pagesPC November 2012bartekdidNo ratings yet
- Deep Groove Ball Bearings PDFDocument11 pagesDeep Groove Ball Bearings PDFArpit VermaNo ratings yet
- Boiler Check ListDocument4 pagesBoiler Check ListFrancis VinoNo ratings yet
- Identifying The TopicDocument2 pagesIdentifying The TopicrioNo ratings yet
- Supplier GPO Q TM 0001 02 SPDCR TemplateDocument6 pagesSupplier GPO Q TM 0001 02 SPDCR TemplateMahe RonaldoNo ratings yet
- Machine Spindle Noses: 6 Bison - Bial S. ADocument2 pagesMachine Spindle Noses: 6 Bison - Bial S. AshanehatfieldNo ratings yet
- General Separator 1636422026Document55 pagesGeneral Separator 1636422026mohamed abdelazizNo ratings yet
- Individual Assignment ScribdDocument4 pagesIndividual Assignment ScribdDharna KachrooNo ratings yet
- Cells in The Urine SedimentDocument3 pagesCells in The Urine SedimentTaufan LutfiNo ratings yet
- Roadmap For Digitalization in The MMO Industry - For SHARINGDocument77 pagesRoadmap For Digitalization in The MMO Industry - For SHARINGBjarte Haugland100% (1)
- Reservoir Rock TypingDocument56 pagesReservoir Rock TypingAffan HasanNo ratings yet
- Weekly Choice - Section B - February 16, 2012Document10 pagesWeekly Choice - Section B - February 16, 2012Baragrey DaveNo ratings yet
- Standard Deviation IntroductionDocument3 pagesStandard Deviation IntroductionShyam ShresthaNo ratings yet
- 5 Important Methods Used For Studying Comparative EducationDocument35 pages5 Important Methods Used For Studying Comparative EducationPatrick Joseph63% (8)
- Bluetooth Home Automation Using ArduinoDocument25 pagesBluetooth Home Automation Using ArduinoRabiNo ratings yet
- DSE61xx Configuration Suite Software Manual PDFDocument60 pagesDSE61xx Configuration Suite Software Manual PDFluisNo ratings yet
- Easa Ad Us-2017-09-04 1Document7 pagesEasa Ad Us-2017-09-04 1Jose Miguel Atehortua ArenasNo ratings yet
- MORTGAGE Short NotesDocument11 pagesMORTGAGE Short Noteshamzatariq015No ratings yet
- Ana White - PLANS - A Murphy Bed YOU Can Build, and Afford To Build - 2011-03-03Document20 pagesAna White - PLANS - A Murphy Bed YOU Can Build, and Afford To Build - 2011-03-03Ahmad KamilNo ratings yet
- Conceptual FrameworkDocument24 pagesConceptual Frameworkmarons inigoNo ratings yet
- Optimization of The Spray-Drying Process For Developing Guava Powder Using Response Surface MethodologyDocument7 pagesOptimization of The Spray-Drying Process For Developing Guava Powder Using Response Surface MethodologyDr-Paras PorwalNo ratings yet
- Bandung Colonial City Revisited Diversity in Housing NeighborhoodDocument6 pagesBandung Colonial City Revisited Diversity in Housing NeighborhoodJimmy IllustratorNo ratings yet
- Imaging Approach in Acute Abdomen: DR - Parvathy S NairDocument44 pagesImaging Approach in Acute Abdomen: DR - Parvathy S Nairabidin9No ratings yet
- Test Bank For Core Concepts of Accounting Information Systems 14th by SimkinDocument36 pagesTest Bank For Core Concepts of Accounting Information Systems 14th by Simkinpufffalcated25x9ld100% (46)
- VEGA MX CMP12HP Data SheetDocument2 pagesVEGA MX CMP12HP Data SheetLuis Diaz ArroyoNo ratings yet
- Philips DVD Player SpecificationsDocument2 pagesPhilips DVD Player Specificationsbhau_20No ratings yet
- Cinema 4D ShortcutsDocument8 pagesCinema 4D ShortcutsAnonymous 0lRguGNo ratings yet
- EASA TCDS E.007 (IM) General Electric CF6 80E1 Series Engines 02 25102011Document9 pagesEASA TCDS E.007 (IM) General Electric CF6 80E1 Series Engines 02 25102011Graham WaterfieldNo ratings yet
- 2.4 Avogadro's Hypothesis+ Equivalent MassesDocument12 pages2.4 Avogadro's Hypothesis+ Equivalent MassesSantosh MandalNo ratings yet
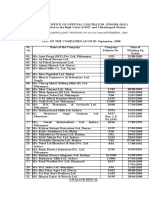
- Statement of Compulsory Winding Up As On 30 SEPTEMBER, 2008Document4 pagesStatement of Compulsory Winding Up As On 30 SEPTEMBER, 2008abchavhan20No ratings yet