You might also like
- Limits Continuity and Differentiability ExerciseDocument79 pagesLimits Continuity and Differentiability ExerciseDev ShrivastavaNo ratings yet
- Differentials and Linear ApproximationDocument3 pagesDifferentials and Linear ApproximationVinayak JhaNo ratings yet
- Chapter 3Document9 pagesChapter 3jeeminsallyNo ratings yet
- Lecture71 SlidesDocument6 pagesLecture71 Slideshuy.nguyenbuiquocNo ratings yet
- Calculus PDFDocument21 pagesCalculus PDFDanica StudiosNo ratings yet
- Lecture 26Document6 pagesLecture 26The tricksterNo ratings yet
- Mod2 - L1 - Limits of Functions (Definition)Document23 pagesMod2 - L1 - Limits of Functions (Definition)Lala LandNo ratings yet
- C 06 Anti DifferentiationDocument31 pagesC 06 Anti Differentiationebrahimipour1360No ratings yet
- Mathematics - SolutionsDocument17 pagesMathematics - SolutionsMichelli YonathaNo ratings yet
- MIT18 01SCF10 Finalsol PDFDocument14 pagesMIT18 01SCF10 Finalsol PDFVinayak JhaNo ratings yet
- Unit 4. Applications of Integration: 4A. Areas Between CurvesDocument25 pagesUnit 4. Applications of Integration: 4A. Areas Between CurvescommonstudentNo ratings yet
- C3 Differentiation Topic AssessmentDocument6 pagesC3 Differentiation Topic AssessmentFaddy OrahaNo ratings yet
- Differentiation Formulas - Derivative Formulas ListDocument13 pagesDifferentiation Formulas - Derivative Formulas Listmohan prasadNo ratings yet
- 1 Limit and Continuity: Review Final Exam Math1003 Math Learning Centre Department of MATH & STATSDocument4 pages1 Limit and Continuity: Review Final Exam Math1003 Math Learning Centre Department of MATH & STATSPenellapheNo ratings yet
- MTH4100 Calculus I: Lecture Notes For Week 6 Thomas' Calculus, Sections 3.5 To 4.1 Except 3.7Document12 pagesMTH4100 Calculus I: Lecture Notes For Week 6 Thomas' Calculus, Sections 3.5 To 4.1 Except 3.7Roy VeseyNo ratings yet
- Anti-Differentiation: DX +4 XDX 3 DX X X XDocument18 pagesAnti-Differentiation: DX +4 XDX 3 DX X X Xmike capitoNo ratings yet
- Intgeral Calculus Lesson 1Document23 pagesIntgeral Calculus Lesson 1DebbieNo ratings yet
- Lecture76 SlidesDocument6 pagesLecture76 Slideshuy.nguyenbuiquocNo ratings yet
- AbitofalgebraDocument4 pagesAbitofalgebraMuhammed Hüseyin BEYRİBEYNo ratings yet
- 1 Continuous Probability Distributions: ObjectivesDocument20 pages1 Continuous Probability Distributions: ObjectiveslwwNo ratings yet
- Basics of Integration: FX FXDocument17 pagesBasics of Integration: FX FXcikguhafidzuddinNo ratings yet
- Lec 1Document15 pagesLec 1Muhammed YasserNo ratings yet
- CALCULODocument3 pagesCALCULOAndres AgredaNo ratings yet
- Basic CalculussDocument21 pagesBasic CalculussPRINCESS JIREAH SHAYNE LOMBOYNo ratings yet
- Basic Calculus Refresher: ExercisesDocument21 pagesBasic Calculus Refresher: ExercisesHafsa musa hafuNo ratings yet
- Math 2114 Practice Exam For Test 1 (2.2-2.8)Document3 pagesMath 2114 Practice Exam For Test 1 (2.2-2.8)WilburNo ratings yet
- Lec 2.4 Logarithmic Differentiation and Derivatives of Other Classes of Functions (Handout)Document29 pagesLec 2.4 Logarithmic Differentiation and Derivatives of Other Classes of Functions (Handout)Leonard Antonio MarcoNo ratings yet
- Friday January 7: (Refers To Section 9.3 in Your Text)Document8 pagesFriday January 7: (Refers To Section 9.3 in Your Text)mike_tzoneNo ratings yet
- Methods of DifferentiationDocument12 pagesMethods of DifferentiationAmro TajNo ratings yet
- Kuliah Ke 12 - 12042021 - Arc LengthDocument6 pagesKuliah Ke 12 - 12042021 - Arc LengthWandi SaputraNo ratings yet
- Simultaneous Ed With Quadratic and LinearDocument3 pagesSimultaneous Ed With Quadratic and LinearKeitra KerrNo ratings yet
- Chapter 6 Statistical Estimation Method of Moments MLEDocument29 pagesChapter 6 Statistical Estimation Method of Moments MLERafael LendyNo ratings yet
- Y Sin 4 X +cos: I. Find The Derivative of Y. Show The Complete Solution. A. Solution: Using The Sum/difference RuleDocument3 pagesY Sin 4 X +cos: I. Find The Derivative of Y. Show The Complete Solution. A. Solution: Using The Sum/difference RuleFranchezca WestermannNo ratings yet
- 650844ad5b75700018808c51 ## Differential Equation Practice SheetDocument14 pages650844ad5b75700018808c51 ## Differential Equation Practice SheetdevanshbcollabNo ratings yet
- Mathematics Formula: Topic Phase-4Document14 pagesMathematics Formula: Topic Phase-4testerNo ratings yet
- Integrales Indefinidas: Página 288Document19 pagesIntegrales Indefinidas: Página 288JoNo ratings yet
- Indef Integration SolutionDocument20 pagesIndef Integration SolutionpandriveNo ratings yet
- MAT Reasoning About Solutions Practice: Non CalculatorDocument5 pagesMAT Reasoning About Solutions Practice: Non CalculatorSanil KatulaNo ratings yet
- Chain Rule, Implicit Differentiation and Linear Approximation and DifferentialsDocument39 pagesChain Rule, Implicit Differentiation and Linear Approximation and Differentialsanon-923611100% (1)
- Applications of DifferentiationDocument5 pagesApplications of DifferentiationV HarishNo ratings yet
- Pertemuan Xiii Kalkulus 2Document6 pagesPertemuan Xiii Kalkulus 2ninety ninetyNo ratings yet
- Mathematical Methods For Business, Economics & FinanceDocument67 pagesMathematical Methods For Business, Economics & FinanceHareen JuniorNo ratings yet
- Week 2Document8 pagesWeek 2ng0934325No ratings yet
- Calc. IIIDocument36 pagesCalc. IIIsamuelaklili1122No ratings yet
- Math TutorialDocument5 pagesMath TutorialJoseph WhelliusNo ratings yet
- The Method of Partial Fractions Math 121 Calculus IIDocument5 pagesThe Method of Partial Fractions Math 121 Calculus IIDelphine KefomNo ratings yet
- Calc2 MTH4101 Solutions 2016Document8 pagesCalc2 MTH4101 Solutions 2016Roy VeseyNo ratings yet
- L1A-Curve Sketching & Asymptotes - CombinedDocument29 pagesL1A-Curve Sketching & Asymptotes - CombinedMark Raphael KipkiruiNo ratings yet
- Verifying Trigonometric IdentitiesDocument3 pagesVerifying Trigonometric IdentitiesKrystle CabalticanNo ratings yet
- Roots of Polynomial Equations: N N N N 1 N 1 1 0Document7 pagesRoots of Polynomial Equations: N N N N 1 N 1 1 0Dahanyakage WickramathungaNo ratings yet
- Quiz 1 Questions - Quiz 1 - MAT110 Courseware - Bux - BRAC UniversityDocument10 pagesQuiz 1 Questions - Quiz 1 - MAT110 Courseware - Bux - BRAC UniversityMD SHAHADAT HOSSAIN SAGORNo ratings yet
- Lecture 11Document9 pagesLecture 11muradNo ratings yet
- Interpolation and Polynomial Approximation: Professor Henry ArguelloDocument96 pagesInterpolation and Polynomial Approximation: Professor Henry ArguelloCristian MartinezNo ratings yet
- 2021 Midterm SolutionsDocument3 pages2021 Midterm Solutionstarik BenseddikNo ratings yet
- IB Math Calculus OptionDocument12 pagesIB Math Calculus OptionMNo ratings yet
- Phd:304 Lab Report Advanced Mathematical Physics: Sachin Singh Rawat 16PH-06 (Department of Physics)Document12 pagesPhd:304 Lab Report Advanced Mathematical Physics: Sachin Singh Rawat 16PH-06 (Department of Physics)sachin rawatNo ratings yet
- CALCULUS Medyo May SagotDocument11 pagesCALCULUS Medyo May SagotANABEL EGOCNo ratings yet
- PRECAL QUARTER 4 MODULE 2 Part 1 Basic Differentiation Techniques and Derivatives of Trigonometric Functions 1Document4 pagesPRECAL QUARTER 4 MODULE 2 Part 1 Basic Differentiation Techniques and Derivatives of Trigonometric Functions 1lurainejuguilonNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Coherent, Monochromatic Plane WavesDocument6 pagesCoherent, Monochromatic Plane Wavesakirank1No ratings yet
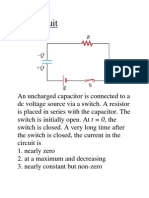
- Prs w13d1 QonlyDocument2 pagesPrs w13d1 Qonlyakirank1No ratings yet
- LexisNexis® 1976 Copyright ActDocument1 pageLexisNexis® 1976 Copyright Actakirank1No ratings yet
- CampbellDocument32 pagesCampbellapi-3720161No ratings yet
- Prs w14d1 QonlyDocument4 pagesPrs w14d1 Qonlyakirank1No ratings yet
- Experiment 6: Prediction 1Document8 pagesExperiment 6: Prediction 1akirank1No ratings yet
- Prs w07d1 QonlyDocument5 pagesPrs w07d1 Qonlyakirank1No ratings yet
- Class 36: Outline: Yell If You Have Any QuestionsDocument46 pagesClass 36: Outline: Yell If You Have Any Questionsakirank1No ratings yet
- Prs w09d1 QonlyDocument4 pagesPrs w09d1 Qonlyakirank1No ratings yet
- Practice Right Hand Rule #1Document4 pagesPractice Right Hand Rule #1akirank1No ratings yet
- Look at The 2 Top Vote Getters (Tied For First Place!) On The Handout Sheet and Vote For The One You Find Most Appealing or Striking. 1. 2Document39 pagesLook at The 2 Top Vote Getters (Tied For First Place!) On The Handout Sheet and Vote For The One You Find Most Appealing or Striking. 1. 2akirank1No ratings yet
- Resistance: L and Cross Sectional Area A, TheDocument5 pagesResistance: L and Cross Sectional Area A, Theakirank1No ratings yet
- Prs w05d1 QonlyDocument3 pagesPrs w05d1 Qonlyakirank1No ratings yet
- Prs w03d1 QonlyDocument4 pagesPrs w03d1 Qonlyakirank1No ratings yet
- Prs w03d2 QonlyDocument8 pagesPrs w03d2 Qonlyakirank1No ratings yet
- Prs w01d1 QonlyDocument9 pagesPrs w01d1 Qonlyakirank1No ratings yet
- Prs w02d1 QonlyDocument6 pagesPrs w02d1 Qonlyakirank1No ratings yet
- Class 32: OutlineDocument36 pagesClass 32: Outlineakirank1No ratings yet
- Class 28: Outline: Hour 1: Displacement Current Maxwell's Equations Hour 2: Electromagnetic WavesDocument33 pagesClass 28: Outline: Hour 1: Displacement Current Maxwell's Equations Hour 2: Electromagnetic Wavesakirank1No ratings yet
- Class 33: Outline: Hour 1: InterferenceDocument38 pagesClass 33: Outline: Hour 1: Interferenceakirank1No ratings yet
- Class 18: Outline: Hour 1: Levitation Experiment 8: Magnetic Forces Hour 2: Ampere's LawDocument49 pagesClass 18: Outline: Hour 1: Levitation Experiment 8: Magnetic Forces Hour 2: Ampere's Lawakirank1No ratings yet
- Class 14: Outline: Hour 1: Magnetic Fields Expt. 5: Magnetic FieldsDocument31 pagesClass 14: Outline: Hour 1: Magnetic Fields Expt. 5: Magnetic Fieldsakirank1No ratings yet
- Class 24: Outline: Hour 1: Inductance & LR Circuits Hour 2: Energy in InductorsDocument37 pagesClass 24: Outline: Hour 1: Inductance & LR Circuits Hour 2: Energy in Inductorsakirank1No ratings yet
- Class 31: Outline: Hour 1: Concept Review / Overview PRS Questions - Possible Exam Questions Hour 2Document46 pagesClass 31: Outline: Hour 1: Concept Review / Overview PRS Questions - Possible Exam Questions Hour 2akirank1No ratings yet
- Class 30: Outline: Hour 1: Traveling & Standing WavesDocument29 pagesClass 30: Outline: Hour 1: Traveling & Standing Wavesakirank1No ratings yet
- Class 15: Outline: Hour 1: Magnetic Force Expt. 6: Magnetic ForceDocument33 pagesClass 15: Outline: Hour 1: Magnetic Force Expt. 6: Magnetic Forceakirank1No ratings yet
- Class 17: Outline: Hour 1: Dipoles & Magnetic FieldsDocument26 pagesClass 17: Outline: Hour 1: Dipoles & Magnetic Fieldsakirank1No ratings yet
- Class 20: Outline: Hour 1: Faraday's LawDocument42 pagesClass 20: Outline: Hour 1: Faraday's Lawakirank1No ratings yet
- Lecture 23: Outline: Yell If You Have Any QuestionsDocument43 pagesLecture 23: Outline: Yell If You Have Any Questionsakirank1No ratings yet
- Class 13: Outline: Hour 1Document33 pagesClass 13: Outline: Hour 1akirank1No ratings yet
- Lecture0 720p enDocument19 pagesLecture0 720p enanupathi mamatha deen dayalNo ratings yet
- Ec - 501 - Microprocessor and Its ApplicationDocument41 pagesEc - 501 - Microprocessor and Its ApplicationDr Nikita ShivhareNo ratings yet
- SJ-20110104162043-001-ZXDU68 T601 (V5.0R01M01) DC Power System Quick Installation & Commissioning Guide PDFDocument4 pagesSJ-20110104162043-001-ZXDU68 T601 (V5.0R01M01) DC Power System Quick Installation & Commissioning Guide PDFAbdus SalamNo ratings yet
- Swim Lane Diagram of Hiring ProcessDocument2 pagesSwim Lane Diagram of Hiring ProcessNAMRATA GUPTANo ratings yet
- Case Study's Business EthicsDocument3 pagesCase Study's Business EthicsSanjay SainiNo ratings yet
- cs2201 Unit1 Notes PDFDocument16 pagescs2201 Unit1 Notes PDFBal BolakaNo ratings yet
- 1.8 Introduction To Networks - Network SecurityDocument3 pages1.8 Introduction To Networks - Network SecurityCristian MoralesNo ratings yet
- FLAC2 DDocument180 pagesFLAC2 DMohamed A. El-BadawiNo ratings yet
- DRAFT User Guide Part2Document225 pagesDRAFT User Guide Part2Okey OkoliNo ratings yet
- Lipa City Colleges Eastern Quezon College, IncDocument65 pagesLipa City Colleges Eastern Quezon College, IncEnergy Trading QUEZELCO 1No ratings yet
- SDM No. 238, S. 2019Document8 pagesSDM No. 238, S. 2019Shiela E. EladNo ratings yet
- Chapter1-Nature of StatisticsDocument10 pagesChapter1-Nature of StatisticsNelia Olaso InsonNo ratings yet
- Digital Modulation HandoutDocument18 pagesDigital Modulation HandoutAyham ALZABEN (AZMiKs)No ratings yet
- L5 L6 L7 L8 L9 - Project ManagementDocument94 pagesL5 L6 L7 L8 L9 - Project Managementapi-19922408No ratings yet
- Pascal Ehimare,: Popm, AsmDocument2 pagesPascal Ehimare,: Popm, AsmharshNo ratings yet
- Small Animal Radiology and Ultrasound A Diagnostic Atlas and TextDocument728 pagesSmall Animal Radiology and Ultrasound A Diagnostic Atlas and TextAndrzej Milczak100% (3)
- 4526 R430 01Document256 pages4526 R430 01nasiruddin276100% (1)
- Oracle Database 11g Release 2 (11.2) - E25519-07 - PLSQL Language ReferenceDocument768 pagesOracle Database 11g Release 2 (11.2) - E25519-07 - PLSQL Language ReferenceLuciano Merighetti MarwellNo ratings yet
- Memory Management Unit 5Document58 pagesMemory Management Unit 5Nishant NalawadeNo ratings yet
- I Ching Philosophy Inspired Optimization: July 2017Document9 pagesI Ching Philosophy Inspired Optimization: July 2017Faizul Haslan Abu HassanNo ratings yet
- PrE5 - Auditing in A CIS EnvironmentDocument14 pagesPrE5 - Auditing in A CIS EnvironmentGlynnis EscobarNo ratings yet
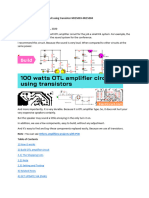
- 100 Watts OTL Amplifier Circuit Using Transistor MJ15003Document7 pages100 Watts OTL Amplifier Circuit Using Transistor MJ15003metinprivat01No ratings yet
- Technovision Technovision: Simplify SimplifyDocument86 pagesTechnovision Technovision: Simplify SimplifySayandip SarkarNo ratings yet
- Atmel SAM-BA ToolDocument7 pagesAtmel SAM-BA Tooleanet20130% (1)
- Sending Output of Concurrent Programs Via EmailDocument1 pageSending Output of Concurrent Programs Via EmailAshish HarbhajankaNo ratings yet
- ASCII CodesDocument17 pagesASCII CodesAndleeb RazzaqNo ratings yet
- Enlaces Descargas Windows Dan RatiaDocument4 pagesEnlaces Descargas Windows Dan RatiaEnrique LinerosNo ratings yet
- Altezza Auto Mirror ClosureDocument7 pagesAltezza Auto Mirror ClosureChard CharlesNo ratings yet
- Ficha Tecnica Estacion Total Sokkia Serie Cx-60Document2 pagesFicha Tecnica Estacion Total Sokkia Serie Cx-60Aceg IngenieríaNo ratings yet