You might also like
- Messenger Development Without Internet Using Zigbee TechnologyDocument89 pagesMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyNo ratings yet
- Ram, Rom, Prom, Eprom: - Memory DevicesDocument37 pagesRam, Rom, Prom, Eprom: - Memory DevicessamsneelamNo ratings yet
- Bongkar Laptop Cq41Document15 pagesBongkar Laptop Cq41Andrian AdeNo ratings yet
- EE2203-Electronic Device and Circuits Question BankDocument11 pagesEE2203-Electronic Device and Circuits Question BankAnbarasan Annamalai100% (1)
- Electronic ProjectsDocument1 pageElectronic ProjectsSanthosh SanNo ratings yet
- Samsung UN46C7000WF Chassis N80A PDFDocument129 pagesSamsung UN46C7000WF Chassis N80A PDFJoseGyEjNo ratings yet
- Solar-Powered Battery Charging With Highly Efficient Buck ConverterDocument20 pagesSolar-Powered Battery Charging With Highly Efficient Buck ConverterSusanNo ratings yet
- LCD Panel Basic ConceptsDocument16 pagesLCD Panel Basic ConceptsshafiuddinkagziNo ratings yet
- Digital Phase Selector: A Mini-Project Report Submitted in Partial Fulfillment Requirements For The Award ofDocument53 pagesDigital Phase Selector: A Mini-Project Report Submitted in Partial Fulfillment Requirements For The Award ofdondbNo ratings yet
- Types of Display Devices Used in Digital CircuitDocument4 pagesTypes of Display Devices Used in Digital CircuitchouguleNo ratings yet
- Semicounductors & Pn-Junction (Complete)Document47 pagesSemicounductors & Pn-Junction (Complete)Khalid AliNo ratings yet
- Articolo SWR EngDocument4 pagesArticolo SWR EngLuis Enrique Castillejo GonzalesNo ratings yet
- PC Control Using TV RemoteDocument46 pagesPC Control Using TV RemoteManojKumarNo ratings yet
- T89C51 Training Board - V5Document44 pagesT89C51 Training Board - V5davidegrimaNo ratings yet
- Pic 18 F 4520Document51 pagesPic 18 F 4520sitizarina78100% (1)
- Philips 40pfl3505df7 Chassis Pl10 5Document87 pagesPhilips 40pfl3505df7 Chassis Pl10 5latino52No ratings yet
- Class D Com FonteDocument29 pagesClass D Com FontenicchioNo ratings yet
- Traffic Light Control SystemDocument12 pagesTraffic Light Control SystemVinay ReddyNo ratings yet
- Railway GateDocument46 pagesRailway GateRocky SinghNo ratings yet
- IP3005A - C181685 enDocument14 pagesIP3005A - C181685 enFernandoNo ratings yet
- Microcontroller Systems (KON 309E) : Lecture Notes (WEEK 1)Document8 pagesMicrocontroller Systems (KON 309E) : Lecture Notes (WEEK 1)Dursun DurmasınNo ratings yet
- 89s52 Microcontroller TutorialDocument30 pages89s52 Microcontroller Tutorialm_adavoodi6479No ratings yet
- Datasheet 4051Document6 pagesDatasheet 4051Jui KulkarniNo ratings yet
- Metering Application ReportDocument428 pagesMetering Application ReportRené PereiraNo ratings yet
- Programming 16 Bit Timer On Atmega328Document9 pagesProgramming 16 Bit Timer On Atmega328VisitOn.T.witte.r100% (1)
- PIC Power SupplyDocument0 pagesPIC Power Supplyaqdus100% (1)
- Interfacing Seven Segment Display To 8051Document16 pagesInterfacing Seven Segment Display To 8051Virang PatelNo ratings yet
- Electronic Devices and Circuits (EME-306) Lab 1: ObjectiveDocument7 pagesElectronic Devices and Circuits (EME-306) Lab 1: ObjectiveAhmed SayedNo ratings yet
- Testing The PIC Microcontroller (Pic 16F877A)Document6 pagesTesting The PIC Microcontroller (Pic 16F877A)Matt ImriNo ratings yet
- Diodes: Symbol Name DescriptionDocument7 pagesDiodes: Symbol Name DescriptionKepin'z TsAx PAweheNo ratings yet
- Interfacing Programs For 8085Document37 pagesInterfacing Programs For 8085archankumarturagaNo ratings yet
- 8051 Project LCD InterfacingDocument7 pages8051 Project LCD InterfacingShailesh Sankdasariya100% (5)
- Service Manual: LCD Color TelevisionDocument132 pagesService Manual: LCD Color Televisionvovan15No ratings yet
- Pure Sine Invereter InfoDocument107 pagesPure Sine Invereter Infoolawale gbadeboNo ratings yet
- MCP-161 - Micro III Direct CommunicationsDocument1 pageMCP-161 - Micro III Direct CommunicationsIre Erick100% (1)
- Delay 1.0K Millis 2.3K Micros 1.0K Delaymicroseconds 359 Analogwrite 274 Tone 1.4K Notone 76 Servo Library 1.6KDocument11 pagesDelay 1.0K Millis 2.3K Micros 1.0K Delaymicroseconds 359 Analogwrite 274 Tone 1.4K Notone 76 Servo Library 1.6KOthmane Bouzarzar100% (1)
- Power Supply Tutorial - SMPS PDFDocument3 pagesPower Supply Tutorial - SMPS PDFJavierCastillejosOtharulaNo ratings yet
- TDA8359JDocument21 pagesTDA8359JCesar HernandezNo ratings yet
- 94 96 DIY 12V Battery Charger EFY Nov 16Document3 pages94 96 DIY 12V Battery Charger EFY Nov 16Vaz PatrickNo ratings yet
- Fast and Effective Embedded System DesignDocument3 pagesFast and Effective Embedded System DesignAimagin100% (2)
- Arduino Timer and InterrupDocument10 pagesArduino Timer and InterrupFabian Monteleone100% (1)
- STM32 RS-485Document12 pagesSTM32 RS-485mail87523No ratings yet
- LG 43 Inch TVDocument71 pagesLG 43 Inch TVVictor Sampa100% (1)
- 25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentDocument84 pages25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentdileeppatraNo ratings yet
- Iraudamp1 PDFDocument22 pagesIraudamp1 PDFamijoski6051No ratings yet
- Antena Bomer 4 ElemenDocument2 pagesAntena Bomer 4 ElemenAudi MirantiNo ratings yet
- PWM Off-Line Switching Regulator Ics: Str-A6000H SeriesDocument13 pagesPWM Off-Line Switching Regulator Ics: Str-A6000H SeriesAnonymous Lfgk6vygNo ratings yet
- SMS Based Energy Meter MonitoringDocument6 pagesSMS Based Energy Meter MonitoringNarayan Singh WaraichNo ratings yet
- LCD TV General Troubleshooting and Tips To RCA L32WD22 FixDocument6 pagesLCD TV General Troubleshooting and Tips To RCA L32WD22 Fixdfenncatman20% (1)
- Switching Power Supply CalculationsDocument4 pagesSwitching Power Supply CalculationsEdilson TavaresNo ratings yet
- Esr LCR r2d2Document6 pagesEsr LCR r2d2Toñi Lopez Vilches100% (1)
- CMOS Bandgap Reference and Current Reference With Simplified Start-Up CircuitDocument8 pagesCMOS Bandgap Reference and Current Reference With Simplified Start-Up CircuitSEP-PublisherNo ratings yet
- Electronic Amplifiers for Automatic Compensators: International Series of Monographs on Automation and Automatic ControlFrom EverandElectronic Amplifiers for Automatic Compensators: International Series of Monographs on Automation and Automatic ControlNo ratings yet
- Circuit Description: P. J. WalesDocument9 pagesCircuit Description: P. J. WalesMario Javier Gonzales100% (1)
- Chapter 3 - Alternating Current MetersDocument35 pagesChapter 3 - Alternating Current MetersANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Static Relay HB Pdf1Document20 pagesStatic Relay HB Pdf1Hasrat Ahmad AbdullahNo ratings yet
- WS14 3phase IGBT v2014Document41 pagesWS14 3phase IGBT v2014Yugendra R100% (1)
- Traction Power Supply Infrastructure and Light Rail Vehicle InterfaceDocument19 pagesTraction Power Supply Infrastructure and Light Rail Vehicle InterfacemoisesramosNo ratings yet
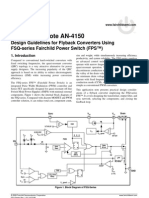
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNo ratings yet
- 43041515Document68 pages43041515KomtelecNo ratings yet
- GSM HarvesterDocument17 pagesGSM HarvesterSarah HeadNo ratings yet
- DatasheetDocument9 pagesDatasheetLaloLandaNo ratings yet
- Experiment 5 Lab Report Uitm Malaysian CollegeDocument16 pagesExperiment 5 Lab Report Uitm Malaysian CollegeFaris Muhammad0% (1)
- Alternator ManualDocument62 pagesAlternator ManualMohammad Hossein100% (4)
- Stopping Power MetersDocument14 pagesStopping Power Meterspigasos100% (1)
- Infineon-EVAL 3KW 2LLC P7 47-ApplicationNotes-v01 00-ENDocument57 pagesInfineon-EVAL 3KW 2LLC P7 47-ApplicationNotes-v01 00-ENjuanNo ratings yet
- CMC 356 Ordering Information ENUDocument4 pagesCMC 356 Ordering Information ENUProsenjitroy RoyNo ratings yet
- Analog Communication Systems: Dr. S. Muni RathnamDocument172 pagesAnalog Communication Systems: Dr. S. Muni RathnamsuryasitNo ratings yet
- Bosch Terminal DesignationDocument7 pagesBosch Terminal DesignationFernando AguilarNo ratings yet
- EE2002 Analog Electronics - OBTLDocument8 pagesEE2002 Analog Electronics - OBTLAaron TanNo ratings yet
- Valvula Solenoide Italpump de Apertura Rapida IENAT 360 Mbar-6 BarDocument4 pagesValvula Solenoide Italpump de Apertura Rapida IENAT 360 Mbar-6 BartiemposmodernosNo ratings yet
- Release Notes RW 5.15.06Document90 pagesRelease Notes RW 5.15.06desenvolvimentoservnewsNo ratings yet
- TV Radar PJDocument55 pagesTV Radar PJShiv Narayan AhirwarNo ratings yet
- High Voltage Transmission SystemDocument67 pagesHigh Voltage Transmission SystemvenkateshNo ratings yet
- Br. Using Smart Impedance To Transform HighDocument9 pagesBr. Using Smart Impedance To Transform HighRayane Aparecida GuimaraesNo ratings yet
- Commander SK: Getting Started GuideDocument54 pagesCommander SK: Getting Started GuideNguyen VuongNo ratings yet
- Conveyor System Using IoT (Report)Document71 pagesConveyor System Using IoT (Report)Faisal Kamarudin100% (1)
- Design and Implementation of Variable Power SupplyDocument8 pagesDesign and Implementation of Variable Power SupplySoyebAhmed50% (2)
- Oec 7600 Service Manual Руководство По ОбслуживаниюDocument110 pagesOec 7600 Service Manual Руководство По ОбслуживаниюJuriyNo ratings yet
- Mohammed 2017Document9 pagesMohammed 2017Vinu KohliNo ratings yet
- Unit-I: Diode Circuits: PES's Modern College of Engineering, Department of Electronics & Telecommunication EngineeringDocument23 pagesUnit-I: Diode Circuits: PES's Modern College of Engineering, Department of Electronics & Telecommunication Engineering1514VARAD DUDHALMALNo ratings yet
- Flatpack DC/DC 24/48 and 48/24 ConvertersDocument20 pagesFlatpack DC/DC 24/48 and 48/24 ConvertersmicrocomsNo ratings yet
- Project List PDFDocument40 pagesProject List PDFThulasi PrasadNo ratings yet