You might also like
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Variational Analysis: The Core of Modern MathematicsDocument743 pagesVariational Analysis: The Core of Modern MathematicsJose Eduardo100% (1)
- Div Grad Curl and AllDocument178 pagesDiv Grad Curl and Alllaurentiufrusinoiu9701100% (1)
- A First Course in DynamicsDocument435 pagesA First Course in DynamicsElseaLi-dongCuiNo ratings yet
- René L. Schilling - (Solution Manual) Measures, Integrals & Martingales (2022)Document344 pagesRené L. Schilling - (Solution Manual) Measures, Integrals & Martingales (2022)mohameed abofayedNo ratings yet
- Rockafellar & Wets - Variational AnalysisDocument749 pagesRockafellar & Wets - Variational AnalysisGustavo Figueiredo100% (1)
- Mechanics: Lectures on Theoretical Physics, Vol. 1From EverandMechanics: Lectures on Theoretical Physics, Vol. 1Rating: 5 out of 5 stars5/5 (2)
- Sochi, Taha - Introduction To Differential Geometry of Space Curves and Surfaces-CreateSpace Independent Publishing Platform (2017)Document443 pagesSochi, Taha - Introduction To Differential Geometry of Space Curves and Surfaces-CreateSpace Independent Publishing Platform (2017)Noah Hsu100% (2)
- Washizu - Variational Methods in Elasticity and PlasticityDocument420 pagesWashizu - Variational Methods in Elasticity and PlasticityRodrigo BT100% (1)
- A Child's Guide To SpinorsDocument9 pagesA Child's Guide To Spinorshmalikn7581No ratings yet
- Elements of Differential Geometry ParkerDocument276 pagesElements of Differential Geometry ParkeraguiNo ratings yet
- Lie Derivative ExplanationDocument21 pagesLie Derivative ExplanationNacho Izquierdo PérezNo ratings yet
- Kähler Metric and Moduli Spaces: Advanced Studies in Pure Mathematics, Vol. 18.2From EverandKähler Metric and Moduli Spaces: Advanced Studies in Pure Mathematics, Vol. 18.2T. OchiaiNo ratings yet
- Differential Geometry, Theory and Applications (Contemporary Applied Mathematics) (Philippe G Ciarlet, Ta-Tsien Li) 9812771468Document302 pagesDifferential Geometry, Theory and Applications (Contemporary Applied Mathematics) (Philippe G Ciarlet, Ta-Tsien Li) 9812771468Kassala HalngaNo ratings yet
- Etale Homotopy of Simplicial Schemes. (AM-104), Volume 104From EverandEtale Homotopy of Simplicial Schemes. (AM-104), Volume 104Rating: 1 out of 5 stars1/5 (1)
- Intro To Tensor CalculusDocument373 pagesIntro To Tensor Calculusmjk100% (3)
- The Classical Groups: Their Invariants and Representations (PMS-1)From EverandThe Classical Groups: Their Invariants and Representations (PMS-1)Rating: 4 out of 5 stars4/5 (2)
- A Gentle Introduction to TensorsDocument87 pagesA Gentle Introduction to Tensorsaaaaaaaa4728No ratings yet
- Lists of IntegralsDocument9 pagesLists of IntegralsEfika Ikenna BruceNo ratings yet
- Jeffreys CartesianTensors TextDocument52 pagesJeffreys CartesianTensors TextHariharan KrishnaswamyNo ratings yet
- The Ascendancy of The Laplace Transform and How It Came About PDFDocument22 pagesThe Ascendancy of The Laplace Transform and How It Came About PDFJose Alejandro MariscalNo ratings yet
- The Perron-Frobenius TheoremDocument78 pagesThe Perron-Frobenius Theoremlaescudero100% (1)
- Topological Data Analysis For Genomics and Evolution Topology in BiologyDocument522 pagesTopological Data Analysis For Genomics and Evolution Topology in BiologyJulissa O CastilloNo ratings yet
- PRIME NUMBERS AND THE RIEMANN HYPOTHESISDocument9 pagesPRIME NUMBERS AND THE RIEMANN HYPOTHESISdiallomailNo ratings yet
- Renormalization Made Easy, BaezDocument11 pagesRenormalization Made Easy, BaezdbranetensionNo ratings yet
- Solution Manual For Brownian Motion 1ndDocument159 pagesSolution Manual For Brownian Motion 1ndAnonymous bZtJlFvPtpNo ratings yet
- Periodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied FunctionsFrom EverandPeriodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied FunctionsNo ratings yet
- Calculus and Analytic GeomertyDocument662 pagesCalculus and Analytic GeomertyxxxWTGRxxxNo ratings yet
- Problem Sets For Feynman Lectures On Physics Vol IIDocument49 pagesProblem Sets For Feynman Lectures On Physics Vol IIUlysses Contreras100% (3)
- Lectures On Classical Mechanics-John Baez PDFDocument76 pagesLectures On Classical Mechanics-John Baez PDFlakshmeeshaNo ratings yet
- Real Variables with Basic Metric Space TopologyFrom EverandReal Variables with Basic Metric Space TopologyRating: 5 out of 5 stars5/5 (1)
- Analytical Mechanics (2017)Document359 pagesAnalytical Mechanics (2017)fluffa2350% (2)
- R. Geroch. General Relativity Lecture Notes. 1972 PDFDocument130 pagesR. Geroch. General Relativity Lecture Notes. 1972 PDFUhumNo ratings yet
- Measure, Integration, and Functional AnalysisFrom EverandMeasure, Integration, and Functional AnalysisRating: 5 out of 5 stars5/5 (1)
- Pilipović, Stevan - Stanković, Bogoljub - Vindas, Jasson - Asymptotic Behavior of Generalized Functions PDFDocument309 pagesPilipović, Stevan - Stanković, Bogoljub - Vindas, Jasson - Asymptotic Behavior of Generalized Functions PDFIgnacio de la Caridad Perez Yzquierdo100% (1)
- Riemannian Geometry ExplainedDocument64 pagesRiemannian Geometry ExplainedAnonymous GRGPAraBTANo ratings yet
- Classical Mechanics: The Theoretical MinimumDocument59 pagesClassical Mechanics: The Theoretical Minimumdavid.contatos4308100% (2)
- 2014 08 29 Quotient SpacesDocument25 pages2014 08 29 Quotient SpacesultimouniversoNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Introduction To Functional Analysis - Goetz GrammelDocument33 pagesIntroduction To Functional Analysis - Goetz GrammelLaura RadoiNo ratings yet
- Maugin - 2013 - Continuum Mechanics Through The Twentieth CenturyDocument320 pagesMaugin - 2013 - Continuum Mechanics Through The Twentieth CenturyAngel Jacome100% (1)
- Lectures on Ordinary Differential EquationsFrom EverandLectures on Ordinary Differential EquationsRating: 3.5 out of 5 stars3.5/5 (2)
- Abramovich Y.A., Aliprantis C.D. Problems in Operator Theory (AMS 2002) (ISBN 0821821474) (T) (402s) PDFDocument402 pagesAbramovich Y.A., Aliprantis C.D. Problems in Operator Theory (AMS 2002) (ISBN 0821821474) (T) (402s) PDFDietethiqueNo ratings yet
- The Conceptual Foundations of the Statistical Approach in MechanicsFrom EverandThe Conceptual Foundations of the Statistical Approach in MechanicsRating: 3 out of 5 stars3/5 (1)
- Raychaudhuri Equation in The Finsler-Randers Space PDFDocument20 pagesRaychaudhuri Equation in The Finsler-Randers Space PDFSHOUVIK SADHUKHANNo ratings yet
- Hida Elliptic Curves and Arithmetic InvariantsDocument463 pagesHida Elliptic Curves and Arithmetic InvariantsFull Name0% (1)
- Nikawa SassaDocument1 pageNikawa Sassamarcos_samudioNo ratings yet
- Effect of Relative Density On Plate Loading Tests On Fibre-Reinforced SandDocument6 pagesEffect of Relative Density On Plate Loading Tests On Fibre-Reinforced Sandmarcos_samudioNo ratings yet
- DPV Wiss False Research FindingsDocument6 pagesDPV Wiss False Research Findingsmarcos_samudioNo ratings yet
- GrainSizeGraph enDocument1 pageGrainSizeGraph enmarcos_samudio100% (1)
- ClassificationOfSoils enDocument1 pageClassificationOfSoils enmarcos_samudio100% (1)
- Poroelasticity PDFDocument11 pagesPoroelasticity PDFmarcos_samudioNo ratings yet
- Gauss Theorem PDFDocument3 pagesGauss Theorem PDFmarcos_samudioNo ratings yet
- Businessmen in Politics PDFDocument14 pagesBusinessmen in Politics PDFmarcos_samudioNo ratings yet
- Solid State PhysicsDocument8 pagesSolid State Physicssoumendra ghoraiNo ratings yet
- STM Turbine Overspeed Failure Investigation-1Document11 pagesSTM Turbine Overspeed Failure Investigation-1Abdulrahman AlkhowaiterNo ratings yet
- Atlassian Vladimir Yastreboff Sept21Document1 pageAtlassian Vladimir Yastreboff Sept21devk2011No ratings yet
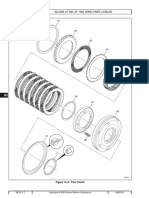
- Allison at 500, at 1500 Series Parts CatalogDocument3 pagesAllison at 500, at 1500 Series Parts Catalogamin chaabenNo ratings yet
- Simulink Kalman Filter PDFDocument3 pagesSimulink Kalman Filter PDFjlissa5262No ratings yet
- Revenue Memorandum Order No. 021-20: I. BackgroundDocument8 pagesRevenue Memorandum Order No. 021-20: I. BackgroundHADTUGINo ratings yet
- LogDocument20 pagesLogAbang SkyNo ratings yet
- Skoda Yeti Brake Systems EngDocument174 pagesSkoda Yeti Brake Systems EngJonattan Javier Ramirez BolañosNo ratings yet
- 303-14 Electronic Engine Controls - Removal and Installation - Camshaft Position CMP SensorDocument6 pages303-14 Electronic Engine Controls - Removal and Installation - Camshaft Position CMP SensorCARLOS LIMADANo ratings yet
- Code2flow 094e9Document1 pageCode2flow 094e9pimfjifNo ratings yet
- PT. NURMAN MITRA SENTOSA HSE REPORTDocument4 pagesPT. NURMAN MITRA SENTOSA HSE REPORTSigit WiyonoNo ratings yet
- Election Laws (Nachura, de Leon, Bernas, Valencia) (2022)Document101 pagesElection Laws (Nachura, de Leon, Bernas, Valencia) (2022)Aimee VenterosoNo ratings yet
- Gastrointestinal Dysfunction in The CriticallyDocument17 pagesGastrointestinal Dysfunction in The Criticallysirenita33No ratings yet
- Malaysia Technical Programme ScreenDocument36 pagesMalaysia Technical Programme ScreenMohd Zainee ZainalNo ratings yet
- 2019 - 2020 Skills Gap Report FINAL PDFDocument12 pages2019 - 2020 Skills Gap Report FINAL PDFPradyumna DangewarNo ratings yet
- 26 - Submission of Calibration Certificate of Relative Testing EquipmentsDocument18 pages26 - Submission of Calibration Certificate of Relative Testing EquipmentsUgrasen ChaudharyNo ratings yet
- MATH 1003 Calculus and Linear Algebra (Lecture 1) : Albert KuDocument18 pagesMATH 1003 Calculus and Linear Algebra (Lecture 1) : Albert Kuandy15No ratings yet
- Active Directory Security Self Assessment v1.4 PDFDocument15 pagesActive Directory Security Self Assessment v1.4 PDFpaul ethikNo ratings yet
- India BG check formDocument4 pagesIndia BG check formPrasanth IglesiasNo ratings yet
- HP MOQ Traditional BPC Mar'21 Pricelist - FTPDocument8 pagesHP MOQ Traditional BPC Mar'21 Pricelist - FTPrachamreddyrNo ratings yet
- Overfishing and Fish Stock DepletionDocument8 pagesOverfishing and Fish Stock DepletionTiger SonNo ratings yet
- Tikaria Expansion Project, ACC Daily Checklist For SlipformDocument2 pagesTikaria Expansion Project, ACC Daily Checklist For SlipformRaju100% (1)
- Tkinter Cheat SheetDocument2 pagesTkinter Cheat Sheetphanina01No ratings yet
- Marcom Plan 2024Document7 pagesMarcom Plan 2024Amith KoshyNo ratings yet
- Fact Sheet How To Manage Confidential Business InformationDocument12 pagesFact Sheet How To Manage Confidential Business InformationMihail AvramovNo ratings yet
- Tools and Techniques of Cost ReductionDocument27 pagesTools and Techniques of Cost Reductionপ্রিয়াঙ্কুর ধর100% (2)
- Bangalisan V Ca G.R. No. 124678 July 31, 1997 Regalado, J.: FactsDocument1 pageBangalisan V Ca G.R. No. 124678 July 31, 1997 Regalado, J.: FactsKate GaroNo ratings yet
- ATA55 CatalogueDocument5 pagesATA55 CatalogueHikmat KtkNo ratings yet
- Faiq ResumeDocument3 pagesFaiq ResumeFoudziah SarinNo ratings yet
- FAO - Industrial Charcoal ProductionDocument33 pagesFAO - Industrial Charcoal ProductionFabiano de Souza0% (1)
- PEFA Regional Government of SomaliDocument172 pagesPEFA Regional Government of SomaliGirmaye HaileNo ratings yet