You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Design of A Basic Piezoresistive Microcantilever Biosensor: Ibrahim Ethem SACU, Mustafa ALCIDocument5 pagesDesign of A Basic Piezoresistive Microcantilever Biosensor: Ibrahim Ethem SACU, Mustafa ALCImfqcNo ratings yet
- Symbolic Circuit Modeling and Simulation Using A Sparse Matrix: An IntroductionDocument6 pagesSymbolic Circuit Modeling and Simulation Using A Sparse Matrix: An IntroductionmfqcNo ratings yet
- The LMS Objective Function. Global Solution. Pseudoinverse of A Matrix. Optimization (Learning) by Gradient Descent. LMS or Widrow-Hoff Algorithms. Convergence of The Batch LMS RuleDocument23 pagesThe LMS Objective Function. Global Solution. Pseudoinverse of A Matrix. Optimization (Learning) by Gradient Descent. LMS or Widrow-Hoff Algorithms. Convergence of The Batch LMS RulemfqcNo ratings yet
- Of Wireless Lans 1 Mac Protocols: Performance Based OnDocument5 pagesOf Wireless Lans 1 Mac Protocols: Performance Based OnmfqcNo ratings yet
- Fuzzy Motion Control of The Ball On Beam: AbstractDocument6 pagesFuzzy Motion Control of The Ball On Beam: AbstractmfqcNo ratings yet
- Lesson9 PDFDocument49 pagesLesson9 PDFmfqcNo ratings yet
- Ad0850232 PDFDocument38 pagesAd0850232 PDFmfqcNo ratings yet
- MC68HC908JB8 Micro Freescale USB ModuloDocument286 pagesMC68HC908JB8 Micro Freescale USB ModulomfqcNo ratings yet
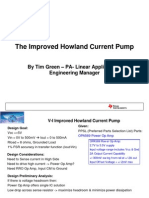
- The Improved Howland Current Pump: by Tim Green - PA-Linear Applications Engineering ManagerDocument8 pagesThe Improved Howland Current Pump: by Tim Green - PA-Linear Applications Engineering ManagermfqcNo ratings yet
- Elise FouassierDocument21 pagesElise FouassiermfqcNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The FlyDocument8 pagesThe FlyDrei Tiam Lacadin100% (1)
- Cruiziat Et Al. 2002Document30 pagesCruiziat Et Al. 2002Juan David TurriagoNo ratings yet
- Curriculum Vitae: Career ObjectiveDocument3 pagesCurriculum Vitae: Career ObjectiveRākesh Rakhi100% (1)
- The Sword and The Exquisiteness PDFDocument1,437 pagesThe Sword and The Exquisiteness PDFTaruna UnitaraliNo ratings yet
- Discover India, January 2018Document51 pagesDiscover India, January 2018calebfriesenNo ratings yet
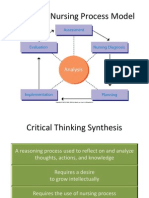
- NUR 104 Nursing Process MY NOTESDocument77 pagesNUR 104 Nursing Process MY NOTESmeanne073100% (1)
- Topic 4 Statistic II (Form 3)Document2 pagesTopic 4 Statistic II (Form 3)Ct KursiahNo ratings yet
- Lesson Plan Ordinal NumbersDocument5 pagesLesson Plan Ordinal Numbersapi-329663096No ratings yet
- NEW Sample ISAT Questions RevisedDocument14 pagesNEW Sample ISAT Questions RevisedHa HoangNo ratings yet
- Contents of HvacDocument2 pagesContents of Hvaclijo johnNo ratings yet
- Application of SPACE MatrixDocument11 pagesApplication of SPACE Matrixdecker444975% (4)
- TML IML DefinitionDocument2 pagesTML IML DefinitionFicticious UserNo ratings yet
- Peter Brandt InterviewDocument38 pagesPeter Brandt InterviewNishant P Kalaskar100% (1)
- 32 Forms of God GaneshaDocument16 pages32 Forms of God Ganeshasudhakarpk2011100% (2)
- Text Descriptive Tentang HewanDocument15 pagesText Descriptive Tentang HewanHAPPY ARIFIANTONo ratings yet
- Project in Precal: Mary Joyce MolinesDocument11 pagesProject in Precal: Mary Joyce MolinesJaja KeykNo ratings yet
- Kimberly Jimenez Resume 10Document2 pagesKimberly Jimenez Resume 10kimberlymjNo ratings yet
- Self-Actualization in Robert Luketic'S: Legally Blonde: A HumanisticDocument10 pagesSelf-Actualization in Robert Luketic'S: Legally Blonde: A HumanisticAyeshia FréyNo ratings yet
- Estocell - Data Sheet - 14-07-06Document2 pagesEstocell - Data Sheet - 14-07-06LeoRumalaAgusTatarNo ratings yet
- UVEX - Helmets & Eyewear 2009Document19 pagesUVEX - Helmets & Eyewear 2009Ivica1977No ratings yet
- ISA Guidelines PPF 1Document19 pagesISA Guidelines PPF 1Vasu DevanNo ratings yet
- 2009-04-CEN-TC121 N1574 Working Programme CEN TC 121Document28 pages2009-04-CEN-TC121 N1574 Working Programme CEN TC 121Manuel ValenteNo ratings yet
- FacebookDocument2 pagesFacebookAbhijeet SingareNo ratings yet
- LEARNING ACTIVITY SHEET in Oral CommDocument4 pagesLEARNING ACTIVITY SHEET in Oral CommTinTin100% (1)
- Paper 1 Set 2 PDFDocument531 pagesPaper 1 Set 2 PDFabdul rehman aNo ratings yet
- Science: BiologyDocument22 pagesScience: BiologyMike RollideNo ratings yet
- VectorCAST QA Factsheet ENDocument2 pagesVectorCAST QA Factsheet ENChaos XiaNo ratings yet
- Marisa Wolf Final New ResumeDocument2 pagesMarisa Wolf Final New Resumeapi-403499166No ratings yet
- Masters Thesis Benyam 2011Document156 pagesMasters Thesis Benyam 2011TechBoy65No ratings yet
- Two Occult Philosophers in The Elizabethan Age: by Peter ForshawDocument10 pagesTwo Occult Philosophers in The Elizabethan Age: by Peter ForshawFrancesco VinciguerraNo ratings yet