You might also like
- Ieee Repc Fault Location Tshort 2007 SubmissionDocument7 pagesIeee Repc Fault Location Tshort 2007 SubmissionkhaledchahineNo ratings yet
- Model Free Traveling Wave Based Fault Location Method For Series Compensated Transmission LineDocument10 pagesModel Free Traveling Wave Based Fault Location Method For Series Compensated Transmission LinekhaledchahineNo ratings yet
- Induction MotorsDocument51 pagesInduction MotorskhaledchahineNo ratings yet
- Clark 1996Document6 pagesClark 1996khaledchahineNo ratings yet
- Ch13 Solutions To Book ExamplesDocument14 pagesCh13 Solutions To Book Examplesjjooeeyycc54% (13)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Tafl KCS 402 Cia-I 2019-20Document2 pagesTafl KCS 402 Cia-I 2019-20vikNo ratings yet
- UNIT - 3: Fast-Fourier-Transform (FFT) Algorithms: Dr. Manjunatha. PDocument100 pagesUNIT - 3: Fast-Fourier-Transform (FFT) Algorithms: Dr. Manjunatha. PMVRajeshMaliyeckalNo ratings yet
- Cbse - Department of Skill Education Curriculum For Session 2021-2022Document13 pagesCbse - Department of Skill Education Curriculum For Session 2021-2022Dushyant SinghNo ratings yet
- Force Plates: Pressure TransducerDocument9 pagesForce Plates: Pressure Transduceramit_pt021No ratings yet
- Copula Modeling: An Introduction For Practitioners: Pravin K. Trivedi and David M. ZimmerDocument111 pagesCopula Modeling: An Introduction For Practitioners: Pravin K. Trivedi and David M. ZimmervinizioNo ratings yet
- For More ACCA Study Materials, Tutor Support, Exam Tips VisitDocument2 pagesFor More ACCA Study Materials, Tutor Support, Exam Tips VisitNeel KostoNo ratings yet
- Detergents (Anionic Surfactants, MBAS)Document1 pageDetergents (Anionic Surfactants, MBAS)Anggun SaputriNo ratings yet
- Exercise 11ADocument12 pagesExercise 11AAdrian BustamanteNo ratings yet
- ConceptBook NAUTITECH-40-OPEN 180703 EnglishDocument104 pagesConceptBook NAUTITECH-40-OPEN 180703 EnglishDenis ClaracNo ratings yet
- KTM Tokamak Project. Present and Future Activity: January 2008Document9 pagesKTM Tokamak Project. Present and Future Activity: January 2008AB XEROXNo ratings yet
- Open-Air Theatre in The Centre of The City: Acoustic Design and Noise Environment ControlDocument3 pagesOpen-Air Theatre in The Centre of The City: Acoustic Design and Noise Environment ControlArchitectural Visualizations ArchitecturelandsNo ratings yet
- Linear Programming: Simplex Method: Dr. R. K Singh Professor, Operations Management MDI, GurgaonDocument58 pagesLinear Programming: Simplex Method: Dr. R. K Singh Professor, Operations Management MDI, GurgaonvsyoiNo ratings yet
- Keystone Retaining WallsDocument98 pagesKeystone Retaining WallsWorld Outdoor Emporium100% (1)
- BLM 343 Course BookDocument966 pagesBLM 343 Course Bookarda1940No ratings yet
- Eia Cea 608Document154 pagesEia Cea 608Максим РадионовNo ratings yet
- Age ProblemsDocument4 pagesAge ProblemsBen JNo ratings yet
- Excel FunctionsDocument13 pagesExcel Functionsfhlim2069No ratings yet
- Summative Test Ist (2nd G)Document2 pagesSummative Test Ist (2nd G)Rosell CabalzaNo ratings yet
- 2021 10 11 - Intro ML - InsermDocument41 pages2021 10 11 - Intro ML - Insermpo esperitableNo ratings yet
- Structural Evaluation TechniquesDocument6 pagesStructural Evaluation TechniquesMohan NaikNo ratings yet
- Servo Motor Application: Assignment - 2Document3 pagesServo Motor Application: Assignment - 2Smakshi ChoudharyNo ratings yet
- Model Selection StrategiesDocument20 pagesModel Selection StrategiesIlinca MariaNo ratings yet
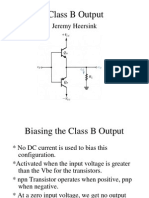
- Class B Output: Jeremy HeersinkDocument10 pagesClass B Output: Jeremy Heersinkdummy1957jNo ratings yet
- Quiz Questions TD 1Document6 pagesQuiz Questions TD 1Susmita PandaNo ratings yet
- Experiment 6Document11 pagesExperiment 6CarlosLorenzoSaninNo ratings yet
- Datasheet ECM 5158 Interface 4pgv1 A80401 PressDocument4 pagesDatasheet ECM 5158 Interface 4pgv1 A80401 Presslgreilly4No ratings yet
- Brochure Cementindustrie PfeifferDocument24 pagesBrochure Cementindustrie Pfeifferdoxa maria0% (1)
- Topic 4Document23 pagesTopic 4Joe HanNo ratings yet
- RRU5909 Technical SpecificationsDocument7 pagesRRU5909 Technical SpecificationsDmitry059100% (1)
- Life Sciences Grade 10 ATP 2024Document19 pagesLife Sciences Grade 10 ATP 2024olwe149No ratings yet