You might also like
- Discrete MathematicsDocument153 pagesDiscrete MathematicspriyaNo ratings yet
- Group 1 - Structure of ComputersDocument115 pagesGroup 1 - Structure of ComputersPELAGIO, Angelo Uriel R.100% (1)
- Anshul Dyundi Machine Learning July 2022Document46 pagesAnshul Dyundi Machine Learning July 2022Anshul Dyundi0% (1)
- Notes About Numerical Methods With MatlabDocument50 pagesNotes About Numerical Methods With MatlabhugocronyNo ratings yet
- Data Structure and AlgorithmDocument3 pagesData Structure and Algorithmkarthikeyan50700HRNo ratings yet
- C++ Interview Question and AnswersDocument12 pagesC++ Interview Question and AnswersNimish SalveNo ratings yet
- Design and Analysis of AlgorithmDocument29 pagesDesign and Analysis of AlgorithmManishNo ratings yet
- Data Structures - Lecture Notes On UNIT 3 Part 2Document69 pagesData Structures - Lecture Notes On UNIT 3 Part 2krishna100% (2)
- SSLC Maths 5 Model Question Papers English MediumDocument21 pagesSSLC Maths 5 Model Question Papers English MediumscientistabbasNo ratings yet
- Object Oriented Programming (OOP) - CS304 Power Point Slides Lecture 05Document40 pagesObject Oriented Programming (OOP) - CS304 Power Point Slides Lecture 05Sameer HaneNo ratings yet
- Continuous and Discrete Signals and Systems by Samir S. Soliman, Mandyam D. SrinathDocument525 pagesContinuous and Discrete Signals and Systems by Samir S. Soliman, Mandyam D. SrinathMonir Uz Zaman100% (1)
- C++ Summarized NotesDocument32 pagesC++ Summarized Noteschandni1972100% (1)
- Dynamic ProgrammingDocument23 pagesDynamic ProgrammingHydroNo ratings yet
- Data StructuresDocument32 pagesData StructuresAditya VikramNo ratings yet
- Object Oriented ProgrammingDocument91 pagesObject Oriented ProgrammingManu Manu100% (1)
- Real Skills That Deliver: Data Science Real Outcomes!Document20 pagesReal Skills That Deliver: Data Science Real Outcomes!KevinXavierNo ratings yet
- CH4 - Linked ListDocument65 pagesCH4 - Linked ListRewina zerouNo ratings yet
- Design and Analysis of AlgorithmsDocument200 pagesDesign and Analysis of AlgorithmsChitra RNo ratings yet
- It33 - Data Structures and AlgorithmsDocument20 pagesIt33 - Data Structures and AlgorithmsMathan NaganNo ratings yet
- Intro - To - Data Structure - Lec - 1Document29 pagesIntro - To - Data Structure - Lec - 1Xafran KhanNo ratings yet
- OOP 2marks and 16marksDocument50 pagesOOP 2marks and 16markspunithavel22No ratings yet
- Daa QB 1 PDFDocument24 pagesDaa QB 1 PDFSruthy SasiNo ratings yet
- OOPs Assignment.Document9 pagesOOPs Assignment.Vibhu RastogiNo ratings yet
- Design and Analysis of Algorithms (DAA) NotesDocument112 pagesDesign and Analysis of Algorithms (DAA) NotesMunavalli Matt K SNo ratings yet
- Data Structure QuestionsDocument176 pagesData Structure QuestionsEzhil Vendhan0% (1)
- Class 12 Geography PDFDocument120 pagesClass 12 Geography PDFKranthi DharmapuriNo ratings yet
- Introduction To Algorithms: Dynamic ProgrammingDocument25 pagesIntroduction To Algorithms: Dynamic ProgrammingjaydipNo ratings yet
- TI Tech Questions and Answers PDFDocument26 pagesTI Tech Questions and Answers PDFSANJEEV KUMARNo ratings yet
- CMP 103 3 Programming in C 3 0 3Document2 pagesCMP 103 3 Programming in C 3 0 3Dinesh PudasainiNo ratings yet
- Object Oriented Programming LanguageDocument17 pagesObject Oriented Programming LanguageTalha Maqsood100% (1)
- By-Sushan Ganasan Mba-4 Sem 100251084Document10 pagesBy-Sushan Ganasan Mba-4 Sem 100251084Sushan GanesanNo ratings yet
- COMP90038 Practice Exam Paper (2) : Dit?usp SharingDocument15 pagesCOMP90038 Practice Exam Paper (2) : Dit?usp SharingAnupa AlexNo ratings yet
- OOPS 2 Marks OfficialDocument23 pagesOOPS 2 Marks OfficialNaijuBijuNo ratings yet
- C++ ArraysDocument42 pagesC++ ArraysabcNo ratings yet
- Programming in C Data Structures 14pcd23Document112 pagesProgramming in C Data Structures 14pcd23ISHITA BASU ROYNo ratings yet
- Cs 8391-Data Structures 2 Marks With Answer: Unit I - Linear Structures - ListDocument26 pagesCs 8391-Data Structures 2 Marks With Answer: Unit I - Linear Structures - ListMerbin JoseNo ratings yet
- OOPS Module 1Document26 pagesOOPS Module 1robinptNo ratings yet
- Red Black Tree MaterialDocument5 pagesRed Black Tree MaterialAvinash AllaNo ratings yet
- Descrete Structure SetsDocument174 pagesDescrete Structure SetsGoyatNo ratings yet
- 1.1 Basics of Data StructuresDocument40 pages1.1 Basics of Data StructuresMugi PawarNo ratings yet
- Chapter 5 - Linked ListDocument58 pagesChapter 5 - Linked ListTanveer Ahmed HakroNo ratings yet
- 01-1-Introduction To Object TechnologyDocument12 pages01-1-Introduction To Object TechnologyTuấn Mạnh PhanNo ratings yet
- Type Conversion in CDocument107 pagesType Conversion in CsuryavamsiNo ratings yet
- Discrete Structure JHCSCDocument21 pagesDiscrete Structure JHCSCrendezvousfrNo ratings yet
- Sorting and Searching AlgorithmsDocument49 pagesSorting and Searching AlgorithmsSubathra Devi MourouganeNo ratings yet
- Unit - 1 (Introduction To SAD)Document12 pagesUnit - 1 (Introduction To SAD)arvindk.online6095100% (1)
- Linear AlgebraDocument466 pagesLinear Algebramfeinber100% (1)
- Chapater - 1 - Introduction To Human Computer InteractionDocument18 pagesChapater - 1 - Introduction To Human Computer InteractionSelhadin abduNo ratings yet
- Intro To Automata TheoryDocument23 pagesIntro To Automata TheoryRaqeeb RahmanNo ratings yet
- Section 1: A2 A)Document13 pagesSection 1: A2 A)abhishek125No ratings yet
- Trees in Data StructuresDocument122 pagesTrees in Data StructuresKarthik PNo ratings yet
- Compiler DesignDocument13 pagesCompiler DesignAbhishek Kumar PandeyNo ratings yet
- Structured ProgrammingDocument17 pagesStructured Programmingsharath1990No ratings yet
- Object Oriented ProgrammingDocument72 pagesObject Oriented Programmingpraptiitm100% (1)
- Data Structures 2 Marks and 16 Marks Question Bank With AnswersDocument27 pagesData Structures 2 Marks and 16 Marks Question Bank With Answersrmeenakshi67% (3)
- Cse2001 Computer-Architecture-And-Organization TH 1.0 37 Cse2001Document2 pagesCse2001 Computer-Architecture-And-Organization TH 1.0 37 Cse2001devipriyaNo ratings yet
- Object Oriented Programming FundamentalsDocument15 pagesObject Oriented Programming Fundamentalsapi-3707985No ratings yet
- Database Development Life CycleDocument15 pagesDatabase Development Life CyclenishandjNo ratings yet
- Introduction To Object-Oriented ProgrammingDocument56 pagesIntroduction To Object-Oriented Programmingpangjei100% (3)
- C++ NotesDocument32 pagesC++ NotesanujagrajNo ratings yet
- Ec8393 - Fundamentals of Data Structures in C: Linear DatastructuresDocument11 pagesEc8393 - Fundamentals of Data Structures in C: Linear DatastructuresRathiNo ratings yet
- DataStructure LMN PDFDocument8 pagesDataStructure LMN PDFShivam TrivediNo ratings yet
- Data Structures-1Document26 pagesData Structures-1Raja KushwahNo ratings yet
- Ch03 Block Ciphers NemoDocument50 pagesCh03 Block Ciphers Nemopitchrks19841No ratings yet
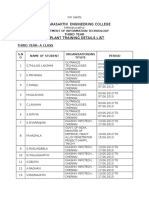
- Adhiparasakthi Engineering College: In-Plant Training Details ListDocument5 pagesAdhiparasakthi Engineering College: In-Plant Training Details Listpitchrks19841No ratings yet
- Application For Faculty PositionDocument5 pagesApplication For Faculty Positionpitchrks19841No ratings yet
- BEC Prelim - OverallDocument9 pagesBEC Prelim - Overallpitchrks19841No ratings yet
- Performance Appraisal: Pe Rce NT Ag e of Ma RK SDocument8 pagesPerformance Appraisal: Pe Rce NT Ag e of Ma RK Spitchrks19841No ratings yet
- Performance Appraisal: Name of The Staff Percentage of MarksDocument6 pagesPerformance Appraisal: Name of The Staff Percentage of Markspitchrks19841No ratings yet
- Data Mining Technique To Analyse The Metrological DataDocument5 pagesData Mining Technique To Analyse The Metrological Datapitchrks19841No ratings yet
- Part-A Answer All Question (7 2 14)Document3 pagesPart-A Answer All Question (7 2 14)pitchrks19841No ratings yet
- Class/Sem: Ii A'/Iii: Omsakthi Adhiparasakthi Engineering College-Melmaruvathur Department of Information TechnologyDocument12 pagesClass/Sem: Ii A'/Iii: Omsakthi Adhiparasakthi Engineering College-Melmaruvathur Department of Information Technologypitchrks19841No ratings yet
- Sliptest 2Document2 pagesSliptest 2pitchrks19841No ratings yet
- Tree TwoDocument1 pageTree Twopitchrks19841No ratings yet
- Sivanunit I TQMDocument12 pagesSivanunit I TQMpitchrks19841No ratings yet
- Sivan Unit III TQMDocument25 pagesSivan Unit III TQMpitchrks19841No ratings yet
- Temperature and Humidity Data Analysis For Future Value Prediction Using Clustering Technique: An ApproachDocument4 pagesTemperature and Humidity Data Analysis For Future Value Prediction Using Clustering Technique: An Approachpitchrks19841No ratings yet
- 2 - Programming and Data Structures PDFDocument224 pages2 - Programming and Data Structures PDFRishendra saiNo ratings yet
- Zeroing Neural Networks, An Introduction To, A Survey Of, and Predictive Computations For Time-Varying Matrix ProblemsDocument24 pagesZeroing Neural Networks, An Introduction To, A Survey Of, and Predictive Computations For Time-Varying Matrix ProblemsgoatcockNo ratings yet
- ADSP Quiz-1 Paper With AnswersDocument2 pagesADSP Quiz-1 Paper With AnswersAvinash BaldiNo ratings yet
- Shanthi Pavan - Chopped N-Path CT DSM With FIR - TCAS 2018Document5 pagesShanthi Pavan - Chopped N-Path CT DSM With FIR - TCAS 2018Saleh Heidary ShalmanyNo ratings yet
- BCT - Subjective QBDocument2 pagesBCT - Subjective QBabhijit kateNo ratings yet
- Difference Between AlexNet, VGGNet, ResNet, and Inception - by Aqeel Anwar - Towards Data ScienceDocument14 pagesDifference Between AlexNet, VGGNet, ResNet, and Inception - by Aqeel Anwar - Towards Data ScienceShrivathsatv ShriNo ratings yet
- Math 2Document11 pagesMath 2Anonymous UrzdtCB0INo ratings yet
- Adventures in Data Analysis: A Systematic Review of Deep Learning Techniques For Pattern Recognition in Cyber Physical Social SystemsDocument65 pagesAdventures in Data Analysis: A Systematic Review of Deep Learning Techniques For Pattern Recognition in Cyber Physical Social SystemsAli Asghar Pourhaji KazemNo ratings yet
- Multi-Label Multimodal Emotion RecognitionDocument17 pagesMulti-Label Multimodal Emotion RecognitionNexgen TechnologyNo ratings yet
- TORP 2017 GIRO PresentationDocument26 pagesTORP 2017 GIRO Presentationtayko177No ratings yet
- VU-Assignment CS101Document3 pagesVU-Assignment CS101mc220203866 JAWAD SARWARNo ratings yet
- Neural Network Toolbox Command ListDocument4 pagesNeural Network Toolbox Command ListAditya ChaudharyNo ratings yet
- CH 2. ForecastingBDocument59 pagesCH 2. ForecastingBMuhammad Rizky ParamartaNo ratings yet
- DiscreteEngg MathematicsDocument15 pagesDiscreteEngg MathematicsShudhanshu ShrivastavaNo ratings yet
- Flowcharts and AlgorithmsDocument75 pagesFlowcharts and Algorithmscheeniecunanan04No ratings yet
- WekapptDocument58 pagesWekapptbahubali kingNo ratings yet
- ECDSA Advantages Over OthersDocument7 pagesECDSA Advantages Over Othersyesswap10No ratings yet
- Blue Futuristic Illustrative Artificial Intelligence Project PresentationDocument12 pagesBlue Futuristic Illustrative Artificial Intelligence Project Presentationbipra.patra24No ratings yet
- MANAP SL 2019 Binomial DistributionDocument7 pagesMANAP SL 2019 Binomial DistributionPatrickNo ratings yet
- A) Measure PDocument6 pagesA) Measure PNagarajapandian MNo ratings yet
- CVMU - FET - PG Mid Semester Exam Paper 2021Document1 pageCVMU - FET - PG Mid Semester Exam Paper 2021aryan kothambiaNo ratings yet
- Mridul ReportDocument43 pagesMridul ReportPankaj GuptaNo ratings yet
- Python3 Program To Add Two NumbersDocument4 pagesPython3 Program To Add Two Numbersdhaneesh22No ratings yet
- Fem Bits Mid 3 ModiofiedDocument5 pagesFem Bits Mid 3 ModiofiedallakagopichandNo ratings yet
- Thesis With Multiple Regression AnalysisDocument6 pagesThesis With Multiple Regression Analysiszehlobifg100% (2)