You might also like
- Notes On One of The Generators of The: S Convexity PhenomenonDocument11 pagesNotes On One of The Generators of The: S Convexity PhenomenonillmrpinheiroNo ratings yet
- S Convexity Phenomenon III and Insights OnDocument10 pagesS Convexity Phenomenon III and Insights OnillmrpinheiroNo ratings yet
- Minima Domain Intervals and The S-Convexity, As Well As The Convexity, PhenomenonDocument6 pagesMinima Domain Intervals and The S-Convexity, As Well As The Convexity, PhenomenonillmrpinheiroNo ratings yet
- Summary of Progresses On S-Convexity and Update of Past ResultsDocument17 pagesSummary of Progresses On S-Convexity and Update of Past ResultstradutoraNo ratings yet
- S S S S: Key Words and Phrases. Convex, S Convex, S Convex, Dragomir, Pearce, Function, S ConvexDocument4 pagesS S S S: Key Words and Phrases. Convex, S Convex, S Convex, Dragomir, Pearce, Function, S ConvexillmrpinheiroNo ratings yet
- On S-Convexity and A Few of Our Results: I.M.R. Pinheiro July 5, 2009Document25 pagesOn S-Convexity and A Few of Our Results: I.M.R. Pinheiro July 5, 2009tradutoraNo ratings yet
- Ijpam 2Document10 pagesIjpam 2tradutoraNo ratings yet
- S 2 ProperextensionjournalDocument4 pagesS 2 ProperextensionjournalillmrpinheiroNo ratings yet
- Minima Domain Intervals and The S-Convexity, As Well As The Convexity, PhenomenonDocument4 pagesMinima Domain Intervals and The S-Convexity, As Well As The Convexity, PhenomenontradutoraNo ratings yet
- Key Words and Phrases. Convex, S Convex, S Convex, Dragomir, Pearce, Function, S ConvexDocument4 pagesKey Words and Phrases. Convex, S Convex, S Convex, Dragomir, Pearce, Function, S Convexillmrpinheiro100% (1)
- Key Words and Phrases. Convex, S Convex, S Convex, Dragomir, Pearce, Function, S ConvexDocument4 pagesKey Words and Phrases. Convex, S Convex, S Convex, Dragomir, Pearce, Function, S ConvexillmrpinheiroNo ratings yet
- Minima Domain Intervals and The S-Convexity, As Well As The Convexity, PhenomenonDocument4 pagesMinima Domain Intervals and The S-Convexity, As Well As The Convexity, PhenomenonillmrpinheiroNo ratings yet
- I.M.R. Pinheiro: Key Words and Phrases. Convex, S Convex, S Convex, S S ConvexDocument6 pagesI.M.R. Pinheiro: Key Words and Phrases. Convex, S Convex, S Convex, S S ConvexillmrpinheiroNo ratings yet
- New Approach to Circular Functions Using Functional EquationsDocument6 pagesNew Approach to Circular Functions Using Functional Equationsenota15No ratings yet
- s-CONVEX FUNCTIONS IN THE THIRD SENSEDocument10 pagess-CONVEX FUNCTIONS IN THE THIRD SENSEAbid javidNo ratings yet
- Functions of Bounded VariationDocument30 pagesFunctions of Bounded VariationSee Keong Lee100% (1)
- ExtVal Slides 2011 2011Document28 pagesExtVal Slides 2011 2011Alzeno DoeNo ratings yet
- First Note On The Definition of S: ConvexityDocument5 pagesFirst Note On The Definition of S: Convexitymarcia_pinheiro_2No ratings yet
- Solving Sturm-Liouville Eigenvalue ProblemsDocument19 pagesSolving Sturm-Liouville Eigenvalue ProblemsmrbookaniNo ratings yet
- Skew-Convex Function Rings and Evaluation of SkewDocument16 pagesSkew-Convex Function Rings and Evaluation of Skewlhousain.mouatadidNo ratings yet
- Change of Variable Formula For Multiple IntegralsDocument6 pagesChange of Variable Formula For Multiple IntegralsAbhishek SenapatiNo ratings yet
- Calculus of VariationsDocument36 pagesCalculus of VariationsAndreas NeophytouNo ratings yet
- Locally Convex Words and Permutations: Christopher CosciaDocument18 pagesLocally Convex Words and Permutations: Christopher Cosciareqiqie reqeqeNo ratings yet
- Stone-Weierstrass Theorem Explained in DepthDocument14 pagesStone-Weierstrass Theorem Explained in DepthAloyana Couto da SilvaNo ratings yet
- MurphyDocument271 pagesMurphyTim PenNo ratings yet
- Theorist's Toolkit Lecture 10: Discrete Fourier Transform and Its UsesDocument9 pagesTheorist's Toolkit Lecture 10: Discrete Fourier Transform and Its UsesJeremyKunNo ratings yet
- Limits & ContinuityDocument9 pagesLimits & ContinuityaliNo ratings yet
- Second Order Linear Equations - A Prelude To Higher Order Linear Equations A Historical ApproachDocument15 pagesSecond Order Linear Equations - A Prelude To Higher Order Linear Equations A Historical ApproachChristian SarmientoNo ratings yet
- Calculus 3 - Chapter 14 - Vector Fields CourseDocument54 pagesCalculus 3 - Chapter 14 - Vector Fields CourseHilmar Castro de GarciaNo ratings yet
- Fibonacci Method-Original PaperDocument5 pagesFibonacci Method-Original PapertpmuhammadtpNo ratings yet
- Oso 9780198827351 Chapter 3Document20 pagesOso 9780198827351 Chapter 3SigmundNo ratings yet
- A Generalization of Fixed Point Theorems in S-Metric SpacesDocument9 pagesA Generalization of Fixed Point Theorems in S-Metric Spacesmuhammad imamNo ratings yet
- DonatoDocument11 pagesDonatoHuỳnh NguyênNo ratings yet
- MA544 Lecture Notes: Topology, Compactness and ContinuityDocument16 pagesMA544 Lecture Notes: Topology, Compactness and ContinuityMark LuNo ratings yet
- Notes On Weyl and Minkowski Problem: Yang Guo 260313651 September 6, 2011Document25 pagesNotes On Weyl and Minkowski Problem: Yang Guo 260313651 September 6, 2011Guo YangNo ratings yet
- Additive mappings satisfying nth power propertyDocument8 pagesAdditive mappings satisfying nth power propertyYaqoubKhanNo ratings yet
- 2017 HW1Document4 pages2017 HW1OmegaNo ratings yet
- 2.2. Norms 1Document8 pages2.2. Norms 1Muhammad ShoaibNo ratings yet
- Saharon Shelah and Juris Steprans - The Covering Numbers of Mycielski Ideals Are All EqualDocument13 pagesSaharon Shelah and Juris Steprans - The Covering Numbers of Mycielski Ideals Are All EqualGlomseNo ratings yet
- Calculus of Variations: X X X X 0Document7 pagesCalculus of Variations: X X X X 0hammoudeh13No ratings yet
- Math Notes 2Document9 pagesMath Notes 2pravankarjog12345678No ratings yet
- Fitzpatrick, Differential Forms and Vector CalculusDocument6 pagesFitzpatrick, Differential Forms and Vector CalculusΣωτήρης ΝτελήςNo ratings yet
- Homer Reid's Solutions to Merzbacher ProblemsDocument12 pagesHomer Reid's Solutions to Merzbacher ProblemsAnna ShabalinaNo ratings yet
- PS 3 SOLUTIONSDocument6 pagesPS 3 SOLUTIONSMega Silvia HasugianNo ratings yet
- Notes On Complex AnalysisDocument6 pagesNotes On Complex AnalysisCaleb JordanNo ratings yet
- 013.on The Generalization of The Costas Property in The ContinuumDocument18 pages013.on The Generalization of The Costas Property in The ContinuumGeorge ProtopapasNo ratings yet
- Explore functions and their composition in calculusDocument10 pagesExplore functions and their composition in calculusPrince Emmanuel ChukwuemekaNo ratings yet
- Lectures On Optimization: A. BanerjiDocument49 pagesLectures On Optimization: A. BanerjiSumit SharmaNo ratings yet
- Uniform PDFDocument2 pagesUniform PDFmasrawy2010No ratings yet
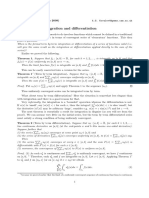
- Term by Term Integration and Differentiation RulesDocument2 pagesTerm by Term Integration and Differentiation Rulesmasrawy2010No ratings yet
- 3 - Partial DerivativesDocument94 pages3 - Partial DerivativesHiếu VũNo ratings yet
- An Overview of Patterson-Sullivan Theory: J.-F. QuintDocument52 pagesAn Overview of Patterson-Sullivan Theory: J.-F. QuintKauê SenaNo ratings yet
- Metric and Complex Complete NotesDocument116 pagesMetric and Complex Complete Notesjamirul skNo ratings yet
- Topic 1 FunctionsDocument3 pagesTopic 1 FunctionsJunalyn BantilloNo ratings yet
- Convex Optimization For Machine LearningDocument110 pagesConvex Optimization For Machine LearningratnadeepbimtacNo ratings yet
- HHFrightinequality Ijnaaphi Convex 2Document8 pagesHHFrightinequality Ijnaaphi Convex 2Miguel Vivas CortezNo ratings yet
- Chapter 13 Partial DerivativesDocument174 pagesChapter 13 Partial DerivativesRosalina KeziaNo ratings yet
- 1190 543 PBDocument17 pages1190 543 PBmarwanNo ratings yet
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Hull LastDocument12 pagesHull LasttradutoraNo ratings yet
- Sailors' HitDocument2 pagesSailors' HittradutoraNo ratings yet
- Vote For MeDocument1 pageVote For MetradutoraNo ratings yet
- AUTHOR (Note 1)Document23 pagesAUTHOR (Note 1)tradutoraNo ratings yet
- ParadoxesDocument8 pagesParadoxestradutoraNo ratings yet
- I. M. R. PinheiroDocument10 pagesI. M. R. Pinheirotradutora100% (2)
- Godel's Theorems and Others'Document30 pagesGodel's Theorems and Others'tradutoraNo ratings yet
- MercerDocument12 pagesMercertradutoraNo ratings yet
- ST Marcia's PrayerDocument5 pagesST Marcia's PrayertradutoraNo ratings yet
- Well Posedness PhilosophyDocument42 pagesWell Posedness PhilosophytradutoraNo ratings yet
- SexismDocument7 pagesSexismtradutoraNo ratings yet
- Liar Last ConferenceDocument10 pagesLiar Last ConferencetradutoraNo ratings yet
- A Summary of The Statements Contained in A Solution To The Sorites and Further Details On The SolutionDocument27 pagesA Summary of The Statements Contained in A Solution To The Sorites and Further Details On The SolutiontradutoraNo ratings yet
- Ijpam 2Document10 pagesIjpam 2tradutoraNo ratings yet
- On S-Convexity and A Few of Our Results: I.M.R. Pinheiro July 5, 2009Document25 pagesOn S-Convexity and A Few of Our Results: I.M.R. Pinheiro July 5, 2009tradutoraNo ratings yet
- COLONIZATIONDocument2 pagesCOLONIZATIONtradutoraNo ratings yet
- Aequationes Paper, Grievance Procedures.Document9 pagesAequationes Paper, Grievance Procedures.tradutora100% (1)
- Note Truth-ValuesDocument2 pagesNote Truth-ValuestradutoraNo ratings yet
- Minima Domain Intervals and The S-Convexity, As Well As The Convexity, PhenomenonDocument4 pagesMinima Domain Intervals and The S-Convexity, As Well As The Convexity, PhenomenontradutoraNo ratings yet
- Review Sever SconvDocument3 pagesReview Sever SconvtradutoraNo ratings yet
- Dirihlee 1 PDFDocument81 pagesDirihlee 1 PDFИРадојичићNo ratings yet
- Understanding Numbers: Numbers and Number LineDocument30 pagesUnderstanding Numbers: Numbers and Number LinerajatNo ratings yet
- Mathematics and Computing 2018Document469 pagesMathematics and Computing 2018Muhammad ShakirNo ratings yet
- Fract Aacademic Course BookletDocument124 pagesFract Aacademic Course BookletRavikumaar RayalaNo ratings yet
- Ch12 Introduction to Coordinates Set 1 Q and Set 2 QDocument43 pagesCh12 Introduction to Coordinates Set 1 Q and Set 2 QAda CheungNo ratings yet
- Supplement A: Example 6Document4 pagesSupplement A: Example 6Yiechin NgNo ratings yet
- Y6 Autumn Block 1 WO7 Round Any Integer 2022Document2 pagesY6 Autumn Block 1 WO7 Round Any Integer 2022M alfyNo ratings yet
- Type of TrianglesDocument5 pagesType of Trianglesdennistt94100% (1)
- notesSDE PDFDocument124 pagesnotesSDE PDFxkzffqmzkxNo ratings yet
- ASTM F1498 NPT Thread Designation.18598 PDFDocument11 pagesASTM F1498 NPT Thread Designation.18598 PDFJohn PaulsyNo ratings yet
- Mathematics of Cryptography: Algebraic StructuresDocument68 pagesMathematics of Cryptography: Algebraic StructuresSrivathsala Suresh TangiralaNo ratings yet
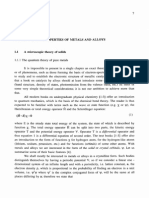
- Chapter 1 Structure and Properties of Metals and Alloys 1995 Studies in Surface Science and CatalysisDocument66 pagesChapter 1 Structure and Properties of Metals and Alloys 1995 Studies in Surface Science and CatalysisHenrique SouzaNo ratings yet
- Measures of Central Tendency - FinalDocument33 pagesMeasures of Central Tendency - FinalPranav KumarNo ratings yet
- EconomicsDocument49 pagesEconomicsRebinNo ratings yet
- Ap Biology Equations and Formulas SheetDocument2 pagesAp Biology Equations and Formulas Sheetapi-286357921No ratings yet
- Algoritmos DistribuidosDocument221 pagesAlgoritmos DistribuidosDiego LozaNo ratings yet
- Inverse Trigonometric Function (Exercise) Module-2Document11 pagesInverse Trigonometric Function (Exercise) Module-2Raju SinghNo ratings yet
- History of Social Sciences in the PhilippinesDocument19 pagesHistory of Social Sciences in the PhilippinesHAZEL JANE ABAPONo ratings yet
- Chapter 4: Fluids Kinematics: Velocity and Description MethodsDocument21 pagesChapter 4: Fluids Kinematics: Velocity and Description MethodsADIL BAHNo ratings yet
- Sample 50436Document16 pagesSample 50436Kunal SumukNo ratings yet
- OSM Aviation Academy - The Pilot Aptitude Test GuideDocument8 pagesOSM Aviation Academy - The Pilot Aptitude Test Guidedereje destaNo ratings yet
- Solutions to Practice Problems: Engineering MechanicsDocument13 pagesSolutions to Practice Problems: Engineering MechanicsShaun Patrick Albao100% (1)
- PIC Microcontroller USB Multi-Channel Data Acquisition and Control SystemDocument21 pagesPIC Microcontroller USB Multi-Channel Data Acquisition and Control SystemY-Morilla MaNo ratings yet
- Grade 9 MathDocument37 pagesGrade 9 MathAnne JimenezNo ratings yet
- GITAM ADMISSION TEST SAMPLE PAPERDocument11 pagesGITAM ADMISSION TEST SAMPLE PAPERSrijaNo ratings yet
- Grade 7 PortionsDocument7 pagesGrade 7 PortionsSnigdha ArunNo ratings yet
- GE6151 Computer Programming NotesDocument152 pagesGE6151 Computer Programming NotesSuryaNo ratings yet
- Theis Confined Aquifer Test AnalysisDocument5 pagesTheis Confined Aquifer Test AnalysisAlberto RicardoNo ratings yet
- Assignment 1 - 1618 - PresentationDocument15 pagesAssignment 1 - 1618 - Presentationzamui sukiNo ratings yet
- Actual DS - Data Science and Big Data Analytics Resume FormatDocument3 pagesActual DS - Data Science and Big Data Analytics Resume FormatLakshit MahavirNo ratings yet