You might also like
- Lec1 PDFDocument24 pagesLec1 PDFAbhishek AroraNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 2Document23 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 2abimanaNo ratings yet
- Lec 37Document51 pagesLec 37Abhishek AroraNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30mahendranNo ratings yet
- Lec7 Flexibility Method and Stiffness MethodDocument34 pagesLec7 Flexibility Method and Stiffness MethodVasu Dev VkmNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 33Document27 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 33Kajal KhanNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Document19 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4abimanaNo ratings yet
- Lec4 PDFDocument19 pagesLec4 PDFAbhishek AroraNo ratings yet
- Lec 8Document39 pagesLec 8GooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 24Document27 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 24mahendranNo ratings yet
- Lec 24Document25 pagesLec 24tamizhanNo ratings yet
- Lec 15Document18 pagesLec 15Janaki RamanNo ratings yet
- Direct Stiffness35Document38 pagesDirect Stiffness35N TNo ratings yet
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument24 pagesEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraNo ratings yet
- Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1Document19 pagesStructural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1vkagarwaNo ratings yet
- Lec 5Document6 pagesLec 5Ravi KumarNo ratings yet
- Lec 1Document15 pagesLec 1Ravi KumarNo ratings yet
- Lec 11Document25 pagesLec 11tamizhanNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument21 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- 3-1 Video Lecture On Experimental Stress Analysis by Prof. K. Ramesh, IIT MadrasDocument38 pages3-1 Video Lecture On Experimental Stress Analysis by Prof. K. Ramesh, IIT MadrasarravindNo ratings yet
- So, Hello Everyone, This Is The Final Lecture On The NPTEL Course Mechanical Characterization of Bituminous MaterialDocument41 pagesSo, Hello Everyone, This Is The Final Lecture On The NPTEL Course Mechanical Characterization of Bituminous MaterialNabanita RoyNo ratings yet
- Lec 13Document15 pagesLec 13Janaki RamanNo ratings yet
- Vibrational AnalysisDocument21 pagesVibrational Analysisgeetesh karadeNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6Document22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6abimanaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8mahendranNo ratings yet
- Lec1 FMDocument25 pagesLec1 FMVinay KorukondaNo ratings yet
- Lec 24Document25 pagesLec 24Aditya KoutharapuNo ratings yet
- Lec25 PDFDocument27 pagesLec25 PDFmahendranNo ratings yet
- Lec34 PDFDocument28 pagesLec34 PDFmb5bariyaNo ratings yet
- CTODDocument30 pagesCTODlucckiiNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 7Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 7mahendranNo ratings yet
- Lec 36Document38 pagesLec 36Abhishek AroraNo ratings yet
- Advance Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument26 pagesAdvance Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasMahmoudMatarNo ratings yet
- Lec 16Document14 pagesLec 16Janaki RamanNo ratings yet
- Matrix MethodDocument21 pagesMatrix MethodGirish DeshmukhNo ratings yet
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrasDocument40 pagesExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrastamizhanNo ratings yet
- Excellent Explanation On Plastic ModulusDocument7 pagesExcellent Explanation On Plastic ModulusTabish IslamNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- Lecture 2 - Idealization of Structures, Threats and ResponsesDocument29 pagesLecture 2 - Idealization of Structures, Threats and ResponsesAshviniNo ratings yet
- Lec 1Document24 pagesLec 1sadiksnmNo ratings yet
- Ace Time TableDocument22 pagesAce Time TableRahul KumarNo ratings yet
- Lec 3Document15 pagesLec 3durgesh patelNo ratings yet
- Dynamics of Physical Systems - Lec01Document24 pagesDynamics of Physical Systems - Lec01rdsrajNo ratings yet
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument29 pagesExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrastamizhanNo ratings yet
- Advanced Marine Structures Prof. Dr. Srinivasan Chandrasekaran Department of Ocean Engineering Indian Institute of Technology, MadrasDocument20 pagesAdvanced Marine Structures Prof. Dr. Srinivasan Chandrasekaran Department of Ocean Engineering Indian Institute of Technology, MadrasmahakNo ratings yet
- Visco-Elastic Material Analysis With Abaqus CAE - Creep Test Simulation - Epoxy Material (360p) Otter AiDocument3 pagesVisco-Elastic Material Analysis With Abaqus CAE - Creep Test Simulation - Epoxy Material (360p) Otter AiAnonymous peMJV0No ratings yet
- Engineering Mechanics Statics 1630433197 PDFDocument500 pagesEngineering Mechanics Statics 1630433197 PDFVerónica GonzalezNo ratings yet
- Nominal (Engineering) Stress and True StressDocument2 pagesNominal (Engineering) Stress and True Stresscena3135No ratings yet
- General Problems in Solid Mechanics and Non-Linearity: $finite Deformation Occurs. inDocument21 pagesGeneral Problems in Solid Mechanics and Non-Linearity: $finite Deformation Occurs. inwearplayNo ratings yet
- Lecture 16Document33 pagesLecture 16Shraddha SudhirNo ratings yet
- Matrix Method of AnalysisDocument28 pagesMatrix Method of AnalysisEvans LionNo ratings yet
- Lec2 PDFDocument38 pagesLec2 PDFJahan ZebNo ratings yet
- Lec 7Document18 pagesLec 7Ravi KumarNo ratings yet
- Linear and Volumetric Deformation Perspectives From Mass ConservationDocument10 pagesLinear and Volumetric Deformation Perspectives From Mass ConservationghulamhabibscmeNo ratings yet
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument27 pagesEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraNo ratings yet
- Good Morning To You. We Are Now On To Lecture 8 in The Second Module On Review of Basic Structural AnalysisDocument28 pagesGood Morning To You. We Are Now On To Lecture 8 in The Second Module On Review of Basic Structural AnalysisLesego Les RatlhogoNo ratings yet
- Lec 2Document16 pagesLec 2Ravi KumarNo ratings yet
- Lec12 PDFDocument23 pagesLec12 PDFAbhishek AroraNo ratings yet
- Deep BeamDocument7 pagesDeep Beamarifi_civilNo ratings yet
- Is 9901 1 1981Document12 pagesIs 9901 1 1981Umer FarooqNo ratings yet
- Seismic Performance Evaluation of RC Frame by Nonlinear Pushover and Time-History AnalysesDocument1 pageSeismic Performance Evaluation of RC Frame by Nonlinear Pushover and Time-History AnalysesUmer FarooqNo ratings yet
- Rock and Rock Mass StrengthDocument28 pagesRock and Rock Mass StrengthUmer FarooqNo ratings yet
- Theoretical and Experimental Investigation of Flexural Wave Propagating in A Periodic Pipe With Fluid-Filled LoadingDocument4 pagesTheoretical and Experimental Investigation of Flexural Wave Propagating in A Periodic Pipe With Fluid-Filled LoadingUmer FarooqNo ratings yet
- 4th IGS TOROCCO TERZAGHI ORATIONDocument1 page4th IGS TOROCCO TERZAGHI ORATIONUmer FarooqNo ratings yet
- Improving The Sustainability of Concrete StructuresDocument13 pagesImproving The Sustainability of Concrete StructuresUmer FarooqNo ratings yet
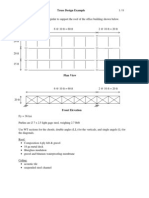
- Truss Design Example: CE 331, Fall 2000Document8 pagesTruss Design Example: CE 331, Fall 2000anbugobi80% (5)
- Standards/manuals/ Guidelines For Small Hydro DevelopmentDocument62 pagesStandards/manuals/ Guidelines For Small Hydro DevelopmentUmer FarooqNo ratings yet
- 2 Way SlabDocument22 pages2 Way SlabAhmed Al-AmriNo ratings yet
- Structural Design of Tall BuildingsDocument1 pageStructural Design of Tall BuildingsUmer FarooqNo ratings yet
- Structural Steel DesignDocument108 pagesStructural Steel DesignMilomir Gavrilovic77% (13)
- ESHA Strategic Study For Development of SHP in EU - 2008Document32 pagesESHA Strategic Study For Development of SHP in EU - 2008assindraNo ratings yet
- Environmental Pollution Monitoring Pollution, Analysis, Legislation, Quality Assurance and ManagementDocument23 pagesEnvironmental Pollution Monitoring Pollution, Analysis, Legislation, Quality Assurance and ManagementUmer FarooqNo ratings yet
- Sustainable Concrete For The 35 Storey Karle Zenith Towers in BangaloreDocument11 pagesSustainable Concrete For The 35 Storey Karle Zenith Towers in BangaloreUmer FarooqNo ratings yet
- Cost Estimate For BridgeDocument1 pageCost Estimate For BridgeUmer FarooqNo ratings yet
- Electronic Distance MeasurementDocument9 pagesElectronic Distance MeasurementUmer FarooqNo ratings yet
- Use of Fly Ash For Road and Embankment Construction CRRI Sudhir MathurDocument72 pagesUse of Fly Ash For Road and Embankment Construction CRRI Sudhir MathurUmer Farooq100% (1)
- Design of Water TankDocument26 pagesDesign of Water Tankspthebuilder91% (11)
- Silica Fume PptsDocument53 pagesSilica Fume PptsUmer FarooqNo ratings yet
- Behavior of Structural Systems For BuildingsDocument56 pagesBehavior of Structural Systems For BuildingsUmer FarooqNo ratings yet
- Fatigue Analysis of Steel Fibre Reinforced Concrete Containing Cement DditivesDocument15 pagesFatigue Analysis of Steel Fibre Reinforced Concrete Containing Cement DditivesUmer FarooqNo ratings yet
- Polycarboxylate Based Superplasticiser For Applications in Self Compacting High Performance ConcreteDocument12 pagesPolycarboxylate Based Superplasticiser For Applications in Self Compacting High Performance ConcreteUmer FarooqNo ratings yet
- Artificial Neural Network For Concrete Mix DesignDocument11 pagesArtificial Neural Network For Concrete Mix DesignUmer Farooq100% (1)
- Load Test On Multilayer Reinforced Coal Ash SlopeDocument44 pagesLoad Test On Multilayer Reinforced Coal Ash SlopeUmer FarooqNo ratings yet
- Permeability Characteristics of Coarse Pond AshDocument29 pagesPermeability Characteristics of Coarse Pond AshUmer FarooqNo ratings yet
- Dewatering Methods For FOUNDATIONSDocument17 pagesDewatering Methods For FOUNDATIONSUmer Farooq50% (2)
- Point Loading of A 1D Cantilever BeamDocument18 pagesPoint Loading of A 1D Cantilever BeamUmer FarooqNo ratings yet
- How To Install AnsysDocument2 pagesHow To Install AnsysUmer FarooqNo ratings yet
- 2011 - Papanikolaou E. - Markatos N. - Int J Hydrogen EnergyDocument9 pages2011 - Papanikolaou E. - Markatos N. - Int J Hydrogen EnergyNMarkatosNo ratings yet
- Plane Strain & Stress AssumptionsDocument8 pagesPlane Strain & Stress AssumptionsAbdul Aziz Abdul MajidNo ratings yet
- Gas TurbineDocument27 pagesGas Turbineghgh140100% (1)
- Isuzu Engine Cooling SystemDocument21 pagesIsuzu Engine Cooling SystemToan100% (1)
- Corrosion Coupon Installation ProcedureDocument31 pagesCorrosion Coupon Installation ProcedureIqbal Mohammad100% (2)
- Full Report Thermo Lab 2Document24 pagesFull Report Thermo Lab 2ahmad pidotNo ratings yet
- Application Note .: Measuring Torsional Operational Deflection Shapes of Rotating ShaftsDocument8 pagesApplication Note .: Measuring Torsional Operational Deflection Shapes of Rotating Shaftsjhon vargasNo ratings yet
- Cosmetics' Quality Control (2012)Document28 pagesCosmetics' Quality Control (2012)Hashim AliNo ratings yet
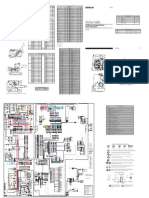
- 315B Forest Swing Machine Electrical System: 7RZ284-UPDocument2 pages315B Forest Swing Machine Electrical System: 7RZ284-UPGilvan JuniorNo ratings yet
- En 5 4 306 24011Document13 pagesEn 5 4 306 24011Edvandro Dennis Iturri ArteagaNo ratings yet
- Heisler Graphics PDFDocument3 pagesHeisler Graphics PDFPedro Augusto Soares100% (1)
- Gear Manufacturing Process With QuestionsDocument60 pagesGear Manufacturing Process With QuestionsUjwala Sonawane100% (1)
- E 1211 - 97 - RteymtetukveDocument6 pagesE 1211 - 97 - RteymtetukveLENDNo ratings yet
- Draftsmangrade II PDFDocument3 pagesDraftsmangrade II PDFakhilaNo ratings yet
- 1 Homework 1Document7 pages1 Homework 1Alexis DelgadoNo ratings yet
- Technical Specification - Rotary Switches LW26-N SeriesDocument3 pagesTechnical Specification - Rotary Switches LW26-N SeriesAleksandar Sasa SeferovicNo ratings yet
- ICEF2009-14054: Slide Bearing Types For Combustion Engines Designed For Upcoming Emission RegulationsDocument9 pagesICEF2009-14054: Slide Bearing Types For Combustion Engines Designed For Upcoming Emission RegulationsFLangNo ratings yet
- College PhysicsDocument4 pagesCollege PhysicsGianne Karl AlmarinesNo ratings yet
- World Class Visual Lubrication Reliability ProgramDocument53 pagesWorld Class Visual Lubrication Reliability ProgramJuan Jiménez GamezNo ratings yet
- Convection Heat TransferDocument49 pagesConvection Heat TransferAli almansouriNo ratings yet
- Radojcic - On High Speed Mono.2010.SYMPDocument19 pagesRadojcic - On High Speed Mono.2010.SYMPnavalarchmarine100% (1)
- 10 6x7 PHE7 BA1 NLDocument8 pages10 6x7 PHE7 BA1 NLRavi KantNo ratings yet
- Gulf Gear WT: High Performance Industrial Gear OilDocument1 pageGulf Gear WT: High Performance Industrial Gear Oilatripathi2009No ratings yet
- Obd VNL VolvoDocument23 pagesObd VNL Volvosalvatore702100% (2)
- 2.sensors & ActuatorsDocument30 pages2.sensors & Actuatorszakariyae el mourabit100% (1)
- AV Maintenance Manual - R1Document15 pagesAV Maintenance Manual - R1Faiz MiserangNo ratings yet
- Flow Control ValvesDocument7 pagesFlow Control ValvesSasko DimitrovNo ratings yet
- AiraDocument1 pageAiraVivek KapadiaNo ratings yet
- Table - 53 Heat Gain From Electric MotorsDocument1 pageTable - 53 Heat Gain From Electric Motorskiran raghukiranNo ratings yet
- Air-To-Air Energy Recovery in HVAC Systems p2Document29 pagesAir-To-Air Energy Recovery in HVAC Systems p2badmike71No ratings yet