You might also like
- Ee105 6Document28 pagesEe105 6Saravanan T YNo ratings yet
- Ee105 5Document32 pagesEe105 5Saravanan T YNo ratings yet
- Department of Technical Education Andhra PradeshDocument36 pagesDepartment of Technical Education Andhra PradeshSaravanan T YNo ratings yet
- Ee105 1Document32 pagesEe105 1Saravanan T YNo ratings yet
- Electric Power Systems: An OverviewDocument29 pagesElectric Power Systems: An OverviewSaravanan T YNo ratings yet
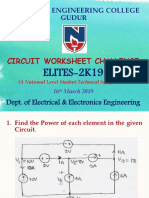
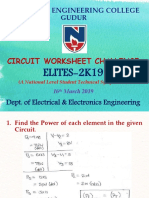
- Circuit WorkSheet ChallengeDocument9 pagesCircuit WorkSheet ChallengeSaravanan T YNo ratings yet
- Control of Induction MotorsDocument80 pagesControl of Induction MotorsSaravanan T YNo ratings yet
- Ohm's Law and Electric CurrentDocument34 pagesOhm's Law and Electric CurrentSaravanan T YNo ratings yet
- Introduction to Basic Principles of Electricity and Ohm's LawDocument26 pagesIntroduction to Basic Principles of Electricity and Ohm's LawSaravanan T YNo ratings yet
- Circuit WorkSheet Challenge KeyDocument9 pagesCircuit WorkSheet Challenge KeySaravanan T YNo ratings yet
- Control of DC Motors by 1-φ ConvertersDocument6 pagesControl of DC Motors by 1-φ ConvertersSaravanan T YNo ratings yet
- Induction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurDocument18 pagesInduction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurSaravanan T YNo ratings yet
- Circuit WorkSheet Challenge KeyDocument9 pagesCircuit WorkSheet Challenge KeySaravanan T YNo ratings yet
- Control of DC Motors by 3-φ ConvertersDocument16 pagesControl of DC Motors by 3-φ ConvertersSaravanan T YNo ratings yet
- Speed Control of Synchronous MotorsDocument12 pagesSpeed Control of Synchronous MotorsSaravanan T YNo ratings yet
- 4 - Control of Induction MotorDocument23 pages4 - Control of Induction MotorSaravanan T YNo ratings yet
- UNIT - 2 - DC & AC MachinesDocument17 pagesUNIT - 2 - DC & AC MachinesSaravanan T YNo ratings yet
- DC Machines: Faraday's Laws and ConstructionDocument34 pagesDC Machines: Faraday's Laws and ConstructionSaravanan T YNo ratings yet
- Unit-1 - DC & AC Circuits PDFDocument60 pagesUnit-1 - DC & AC Circuits PDFSaravanan T Y100% (5)
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Electrical Machine 1Document10 pagesElectrical Machine 1Irfan NaqviNo ratings yet
- UNIT - 2 - DC & AC MachinesDocument17 pagesUNIT - 2 - DC & AC MachinesSaravanan T YNo ratings yet
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Ii. Iii I: AcademicDocument1 pageIi. Iii I: AcademicSaravanan T YNo ratings yet
- Synchronous Generators NotesDocument75 pagesSynchronous Generators NotesSaravanan T Y100% (1)
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGDocument6 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGSaravanan T YNo ratings yet
- Narayana Engineering College Power Semiconductor Drives SubjectiveDocument7 pagesNarayana Engineering College Power Semiconductor Drives SubjectiveSaravanan T YNo ratings yet
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Document9 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Saravanan T YNo ratings yet
- TimersDocument51 pagesTimersSaravanan T YNo ratings yet
- Arm7 Scrib1Document72 pagesArm7 Scrib1Saravanan T YNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- GEH-6676C - Power Systems StabilizerDocument64 pagesGEH-6676C - Power Systems Stabilizerdownloadiz100% (1)
- AC Machines (Induction Motors)Document2 pagesAC Machines (Induction Motors)marlon desaculaNo ratings yet
- If You Have A Speedtronic Mark IV or Mark V or Mark VIDocument55 pagesIf You Have A Speedtronic Mark IV or Mark V or Mark VIAnonymous fDP5ceNo ratings yet
- Design of Electric Auto RikshawDocument20 pagesDesign of Electric Auto RikshawChakradhar YadavNo ratings yet
- AE55et PDFDocument3 pagesAE55et PDFLahari Ratnanjali ModuguNo ratings yet
- Synchronous Generator II PDFDocument20 pagesSynchronous Generator II PDFCh. Ali GhafoorNo ratings yet
- Unit - I: Basic Performance Equations of D.C. MotorsDocument21 pagesUnit - I: Basic Performance Equations of D.C. MotorsNoah AdityaNo ratings yet
- 5 - Basics of Fault CalculationDocument109 pages5 - Basics of Fault Calculationharish50% (2)
- WEG Synchronous Alternators G Line 10680382 Manual English DCDocument151 pagesWEG Synchronous Alternators G Line 10680382 Manual English DCFelipe Del CastilloNo ratings yet
- ELECTRICAL Engineering Interview Questions With Answers Free Download - EEEDocument33 pagesELECTRICAL Engineering Interview Questions With Answers Free Download - EEEearhyathNo ratings yet
- CNP Load Interconnection Data Request Form Rev 030917Document6 pagesCNP Load Interconnection Data Request Form Rev 030917JeffNo ratings yet
- ELECTRICAL QUESTIONS AND ANSWERS-MCQ-8-ETO - Electro Technical OfficerDocument11 pagesELECTRICAL QUESTIONS AND ANSWERS-MCQ-8-ETO - Electro Technical Officeramit100% (3)
- Electrical & Electronics Engineering Syllabus-Sem III To Sem VIIIDocument64 pagesElectrical & Electronics Engineering Syllabus-Sem III To Sem VIIISaroj Kumar RajakNo ratings yet
- PM Machine Model For SimulationDocument6 pagesPM Machine Model For SimulationLelosPinelos123No ratings yet
- Siemens: Functional Restrictions Which Have Been CorrectedDocument3 pagesSiemens: Functional Restrictions Which Have Been CorrectedROY MANo ratings yet
- Tuning Strategies for Field Oriented Control of PMSM Position DrivesDocument7 pagesTuning Strategies for Field Oriented Control of PMSM Position Drivessaptarshi19No ratings yet
- Infineon Motorcontrol - Handbook AdditionalTechnicalInformation v01 - 00 EN PDFDocument110 pagesInfineon Motorcontrol - Handbook AdditionalTechnicalInformation v01 - 00 EN PDFmarvin2008No ratings yet
- 82101E Broch Drive Overview EN LOWDocument16 pages82101E Broch Drive Overview EN LOWraulisonrodrigoNo ratings yet
- Quotation Screw Air Compressor Gas-30a VFC Zq20201005-04Document26 pagesQuotation Screw Air Compressor Gas-30a VFC Zq20201005-04Maurice Alfaro ArnezNo ratings yet
- Classification of AC MachinesDocument34 pagesClassification of AC MachinesNaveed ahmadNo ratings yet
- Mock Test 12 Eee QuestionsDocument11 pagesMock Test 12 Eee QuestionsrajkumarthatiNo ratings yet
- Performance Improvement of Synchronous Generator by Stator WindingDocument6 pagesPerformance Improvement of Synchronous Generator by Stator WindingIAEME PublicationNo ratings yet
- Electric Vehicles For India: Overview and Challenges: June 2019Document5 pagesElectric Vehicles For India: Overview and Challenges: June 2019thumula.rameshNo ratings yet
- Design and Experimental Performance Assessment of An Outer Rotor PM Assisted SynRM For The Electric Bike PropulsionDocument11 pagesDesign and Experimental Performance Assessment of An Outer Rotor PM Assisted SynRM For The Electric Bike PropulsionTejas PanchalNo ratings yet
- Basic Electrical Engineering - Synchronous GeneratorDocument82 pagesBasic Electrical Engineering - Synchronous GeneratorlAntiherolNo ratings yet
- Sensored Field Oriented Control of A Permanent Magnet Synchronous Motor (PMSM)Document35 pagesSensored Field Oriented Control of A Permanent Magnet Synchronous Motor (PMSM)Muhammad Waseem AnwarNo ratings yet
- Extended Kalman Filter Based Speed Sensorless PMSM Control with Load ReconstructionDocument16 pagesExtended Kalman Filter Based Speed Sensorless PMSM Control with Load ReconstructionSohibul HajahNo ratings yet
- SynRM Præsentation ExternalDocument29 pagesSynRM Præsentation ExternalMarissa Tania TNo ratings yet
- Synchronous Machine Models for Stability StudiesDocument29 pagesSynchronous Machine Models for Stability StudiesKashif RehmanNo ratings yet
- pb04: A 3600 RPM, 60 HZ, 13.8 KV Synchronous Generator Has A Synchronous Reactance of 20Document3 pagespb04: A 3600 RPM, 60 HZ, 13.8 KV Synchronous Generator Has A Synchronous Reactance of 20Hamid BentarziNo ratings yet