You might also like
- Pide AutotuneDocument28 pagesPide AutotuneBocefaloNo ratings yet
- Promis e ANSI IEEE TutorialDocument127 pagesPromis e ANSI IEEE Tutorialyongcv50% (2)
- SafetyNet Logic Workbench Getting Started GuideDocument103 pagesSafetyNet Logic Workbench Getting Started GuideRekik MHNo ratings yet
- Whats New in EuControl 18.3Document24 pagesWhats New in EuControl 18.3arlan bey-beyNo ratings yet
- Tia - Mto Adiopnu1 V1 0 2202usDocument56 pagesTia - Mto Adiopnu1 V1 0 2202usMiguel MayoNo ratings yet
- SCAutoOVO 1.3Document112 pagesSCAutoOVO 1.3Arunkumar KumaresanNo ratings yet
- 8th Gen Core Family Datasheet Vol 1 Rev009Document155 pages8th Gen Core Family Datasheet Vol 1 Rev009elpirata666No ratings yet
- 8th Gen Core Family Datasheet Vol 1 Rev008Document140 pages8th Gen Core Family Datasheet Vol 1 Rev008strip1No ratings yet
- Sifive Vcu118 Fpga Getting Started Guide 20G1.05.00Document34 pagesSifive Vcu118 Fpga Getting Started Guide 20G1.05.00zeeshanNo ratings yet
- Xpediter/Tso and Xpediter/Ims Messages and Codes: Release 7.2Document152 pagesXpediter/Tso and Xpediter/Ims Messages and Codes: Release 7.2DavidKirkwoodNo ratings yet
- Pentium Pro Processor BIOS Writer's Guide: January, 1996Document73 pagesPentium Pro Processor BIOS Writer's Guide: January, 1996MarcoNo ratings yet
- Bentley Substation IEC TutorialDocument122 pagesBentley Substation IEC TutorialHASHMATKHAN100% (3)
- Power MillDocument1,176 pagesPower Millyorgf92% (13)
- Audio Plug Ins GuideDocument350 pagesAudio Plug Ins GuidePanagiotis BerlisNo ratings yet
- IRC5-Getting Started 3HAC021564-001, Rev D, enDocument47 pagesIRC5-Getting Started 3HAC021564-001, Rev D, enadriano_falavinha9186No ratings yet
- Operation Manual ECOVARIO, ECOSTEP, ECOMPACT. ECO Studio Operation Manual ECOVARIO, ECOSTEP, ECOMPACT. Subject To Change Without Notice!Document172 pagesOperation Manual ECOVARIO, ECOSTEP, ECOMPACT. ECO Studio Operation Manual ECOVARIO, ECOSTEP, ECOMPACT. Subject To Change Without Notice!juan ortegaNo ratings yet
- 3HAC078375 AM IoT Gateway-EnDocument88 pages3HAC078375 AM IoT Gateway-EnMerced HernandezNo ratings yet
- Advc2-3001advc Custom Logic Tool r1.1 WebDocument36 pagesAdvc2-3001advc Custom Logic Tool r1.1 WebNguyen Minh Tri100% (1)
- CDHD2 DDHD ServoStudio2 fw2.15.x Rev 1.1Document124 pagesCDHD2 DDHD ServoStudio2 fw2.15.x Rev 1.1asirikulathungaNo ratings yet
- Intel® 64 and IA-32 Architectures Software Developer's ManualDocument646 pagesIntel® 64 and IA-32 Architectures Software Developer's ManualShrey FNo ratings yet
- Prolin Terminal Manager (2.0.2)Document57 pagesProlin Terminal Manager (2.0.2)acoliveira OliveiraNo ratings yet
- APAX-5520 Software Manual Ver1Document50 pagesAPAX-5520 Software Manual Ver1Samdan NamhaisurenNo ratings yet
- User Manual For IPM DIP101 PDFDocument61 pagesUser Manual For IPM DIP101 PDFCHIEFNo ratings yet
- 1678 Modbus TCP Protocol GuideDocument56 pages1678 Modbus TCP Protocol GuideUrfan AshrafNo ratings yet
- Audio Plug-Ins Guide PDFDocument399 pagesAudio Plug-Ins Guide PDFGladys TseNo ratings yet
- Audio Plug-Ins Guide PDFDocument398 pagesAudio Plug-Ins Guide PDFtwentysixtwoNo ratings yet
- Audio Plug-Ins GuideDocument316 pagesAudio Plug-Ins GuideAle EstradaNo ratings yet
- SKL PCH EDS H Book - Rev007 - PUBLICDocument293 pagesSKL PCH EDS H Book - Rev007 - PUBLICxtrangeNo ratings yet
- Quickstart Manual: Qs - Dsoft32 - MDocument62 pagesQuickstart Manual: Qs - Dsoft32 - MSilvia Del RioNo ratings yet
- FT Alarms and Events System Configuration GuideDocument288 pagesFT Alarms and Events System Configuration GuidenamhtsNo ratings yet
- IRC5 Additional Options 3HAC023668 001 - RevDocument66 pagesIRC5 Additional Options 3HAC023668 001 - RevyangardaixNo ratings yet
- VVDI2 - Transponder Programmer User Manual: WWW - Xhorseshop.usDocument44 pagesVVDI2 - Transponder Programmer User Manual: WWW - Xhorseshop.usToddUlrichNo ratings yet
- 6BTM ManualDocument56 pages6BTM ManualIvan TodorovicNo ratings yet
- Ethernet Communication Modules: Manual Number H24 - ECOM - MDocument67 pagesEthernet Communication Modules: Manual Number H24 - ECOM - MSilvia Del RioNo ratings yet
- 1734 Um007 - en PDocument53 pages1734 Um007 - en PFadFadNo ratings yet
- GE PPS Getting StartedDocument62 pagesGE PPS Getting StartedLeonardPrayitnoNo ratings yet
- DL-H61M-VG4: Motherboard User ManualDocument52 pagesDL-H61M-VG4: Motherboard User ManualSutripti Bardhan100% (1)
- SKL PCH Eds H Book Rev006 Public 775591Document294 pagesSKL PCH Eds H Book Rev006 Public 775591duron9000No ratings yet
- Intel® 852GM/852GMVDocument176 pagesIntel® 852GM/852GMVMohammad kazem DehghaniNo ratings yet
- Drawmer Dynamics GuideDocument37 pagesDrawmer Dynamics Guideqwertyman21No ratings yet
- User Manual PCI 9113A Rev1.30Document91 pagesUser Manual PCI 9113A Rev1.30iman wahyudinNo ratings yet
- C125 User ManualDocument93 pagesC125 User ManualAshish BatraNo ratings yet
- ABR I O Driver Manual PDFDocument209 pagesABR I O Driver Manual PDFGianny Marcos Fonseca AiresNo ratings yet
- 750-353 EMS Elite Monitoring SystemDocument36 pages750-353 EMS Elite Monitoring SystemOsama AlgueferNo ratings yet
- Manual Op5 15 eDocument177 pagesManual Op5 15 eFernando DallaquaNo ratings yet
- Batch-In009 - en - User GuideDocument72 pagesBatch-In009 - en - User Guiderahulsharma143No ratings yet
- AmbrogioClientManual p1-p24Document24 pagesAmbrogioClientManual p1-p24Scott CampbellNo ratings yet
- 320632Document57 pages320632radaki-1No ratings yet
- Logix 5000 Controllers Nonvolatile Memory Card: Programming ManualDocument31 pagesLogix 5000 Controllers Nonvolatile Memory Card: Programming Manualjoao alexandre correaNo ratings yet
- Logix 5000 Controllers Nonvolatile Memory Card: Programming ManualDocument31 pagesLogix 5000 Controllers Nonvolatile Memory Card: Programming Manualjoao alexandre correaNo ratings yet
- PLC A120 AegDocument236 pagesPLC A120 AegMiguel Rubino0% (1)
- Protool ManualDocument214 pagesProtool Manualapi-3845141100% (4)
- Intel 64 and IA-32 Architectures Software Developer's ManualDocument640 pagesIntel 64 and IA-32 Architectures Software Developer's Manualflach062No ratings yet
- FT Alarms and Events System Configuration GuideDocument281 pagesFT Alarms and Events System Configuration GuideValentim NetoNo ratings yet
- EEZZ1215-Cat Composer Service TechnicianAppGuide 2.20.15Document52 pagesEEZZ1215-Cat Composer Service TechnicianAppGuide 2.20.15Luz Estela Perez NavarroNo ratings yet
- Encryption For Controllers: Perpetual InnovationDocument36 pagesEncryption For Controllers: Perpetual InnovationandromedafNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- PIC Microcontroller Projects in C: Basic to AdvancedFrom EverandPIC Microcontroller Projects in C: Basic to AdvancedRating: 5 out of 5 stars5/5 (10)
- Embedded System Design on a Shoestring: Achieving High Performance with a Limited BudgetFrom EverandEmbedded System Design on a Shoestring: Achieving High Performance with a Limited BudgetRating: 4 out of 5 stars4/5 (1)
- DCOM Rslogix5000Document30 pagesDCOM Rslogix5000Sneider CastañedaNo ratings yet
- Ps Impulse X 2 Data Sheet 2012Document12 pagesPs Impulse X 2 Data Sheet 2012Sneider CastañedaNo ratings yet
- ITCODCOMSettingsDocument14 pagesITCODCOMSettingsRamesh GarikapatiNo ratings yet
- Recap2 User's GuideDocument59 pagesRecap2 User's GuideSneider CastañedaNo ratings yet
- Recap2 User's GuideDocument59 pagesRecap2 User's GuideSneider CastañedaNo ratings yet
- Yasakawa Servo Driver Sigma-II User ManualDocument488 pagesYasakawa Servo Driver Sigma-II User Manualarifmal100% (1)
- Sri Lankan Mathematics Competition 2018 April 7, 2018 10:30 Am - 12 NoonDocument4 pagesSri Lankan Mathematics Competition 2018 April 7, 2018 10:30 Am - 12 NoonV.NawaneethakrishnanNo ratings yet
- NLP 4Document13 pagesNLP 4Mohit NairNo ratings yet
- Thyristors, Triacs, DiacsDocument5 pagesThyristors, Triacs, DiacsAnonymous n50GmJNo ratings yet
- Mathematics 5 Q1 W10Document31 pagesMathematics 5 Q1 W10Aices Jasmin Melgar BongaoNo ratings yet
- Zemichael Berhe MehariDocument99 pagesZemichael Berhe Meharidhanesh kumarNo ratings yet
- IO2654 - F11 - 2013 - WDM Management PDFDocument23 pagesIO2654 - F11 - 2013 - WDM Management PDFKlaudio MarkoNo ratings yet
- Assignment Atomic Structure JH Sir-2611Document30 pagesAssignment Atomic Structure JH Sir-2611Shivam KumarNo ratings yet
- 19-02 RIP The Routing Information ProtocolDocument12 pages19-02 RIP The Routing Information Protocolrichard akpagniNo ratings yet
- Item 102 and Item 505Document42 pagesItem 102 and Item 505Wilbert Carlo RachoNo ratings yet
- Electromagnetic InductionDocument13 pagesElectromagnetic InductionRanjit SinghNo ratings yet
- Bench Work Practice ObjectivesDocument16 pagesBench Work Practice ObjectivesHanzzel Charles100% (3)
- Elance Service Manaual - Rev H PDFDocument94 pagesElance Service Manaual - Rev H PDFJuanAguileraOlivo67% (3)
- GDM Ch-17 Abuts Ret WallsDocument136 pagesGDM Ch-17 Abuts Ret WallsNguyen Ngoc DuyenNo ratings yet
- IND780 Firmware Rev History 7-4-05Document17 pagesIND780 Firmware Rev History 7-4-05Eduardo HerreraNo ratings yet
- Water TreatmentDocument123 pagesWater TreatmentkaranNo ratings yet
- LTE Call Processing and Handover - EngDocument73 pagesLTE Call Processing and Handover - EngKmohamed84100% (1)
- 0511-A 1Document24 pages0511-A 1suprita100% (1)
- Nuova Bravo 1.4 16V Instrument/Gauge Electrical Circuits 5505Document18 pagesNuova Bravo 1.4 16V Instrument/Gauge Electrical Circuits 5505a123123123No ratings yet
- Improving Stirling's FormulaDocument10 pagesImproving Stirling's Formuladayseizer12No ratings yet
- Approaches To The Tight Reservoir Laboratory CharacterisationDocument6 pagesApproaches To The Tight Reservoir Laboratory Characterisationismail.shNo ratings yet
- 17 PCS ResourceGuide Full Final1 PDFDocument68 pages17 PCS ResourceGuide Full Final1 PDFMako ZoltanNo ratings yet
- MCQ Iapm Double Final 1Document48 pagesMCQ Iapm Double Final 1moamen BNo ratings yet
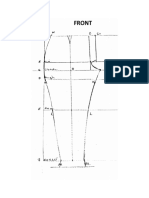
- Measure Front & Back Pants PatternDocument8 pagesMeasure Front & Back Pants PatternAlicia MyersNo ratings yet
- GE8152 EG Model - II MCQ (Part-A) - Print - QuizizzDocument6 pagesGE8152 EG Model - II MCQ (Part-A) - Print - QuizizzsivashanmugamNo ratings yet
- Med - Leaf - Full ReportDocument31 pagesMed - Leaf - Full ReportAdithya s kNo ratings yet
- Temp Card PBMDocument18 pagesTemp Card PBMRemil CastañedaNo ratings yet
- EPSRC Thermal Managemeng Progress Report Newcastle University 2Document35 pagesEPSRC Thermal Managemeng Progress Report Newcastle University 2vklsNo ratings yet
- Declaring An ObjectsDocument36 pagesDeclaring An ObjectsAnanthu RKNo ratings yet
- Isolated Digit Recognizer Using Gaussian Mixture ModelsDocument44 pagesIsolated Digit Recognizer Using Gaussian Mixture ModelsAbdelkbir WsNo ratings yet
- Surface Vehicle Standard: Issued FEB2004Document19 pagesSurface Vehicle Standard: Issued FEB2004Jeferson CostaNo ratings yet