You might also like
- Control PID TIA PORTAL 1Document12 pagesControl PID TIA PORTAL 1Manuel Garcia Suarez100% (1)
- Practica 6 AutomatizacionDocument8 pagesPractica 6 Automatizacionstefany toroNo ratings yet
- Controles Logicos ProgramablesDocument593 pagesControles Logicos ProgramablesGerman Bello PeraltaNo ratings yet
- 6 Documentació PDFDocument258 pages6 Documentació PDFEduardo ZepedaNo ratings yet
- Preguntas PLC Segundo Parcial CompletoDocument3 pagesPreguntas PLC Segundo Parcial CompletoDaniel SandovalNo ratings yet
- WinCC RT Professional VDocument13 pagesWinCC RT Professional VPepe LeivaNo ratings yet
- Planificación de la instalación de un sistema automáticoDocument52 pagesPlanificación de la instalación de un sistema automáticoANANo ratings yet
- GRAPH v1 6Document50 pagesGRAPH v1 6Freddy Javier Orbes0% (1)
- Contador y Temporizador PLCDocument38 pagesContador y Temporizador PLCJose Urpeque CastilloNo ratings yet
- TIA Portal Ejercicios 1 BasicoDocument3 pagesTIA Portal Ejercicios 1 BasicoRoberto Pedrón Domingo0% (1)
- Selector de piezas CX-PDocument16 pagesSelector de piezas CX-PManuel Angel GilNo ratings yet
- Unity M340 tutorialDocument66 pagesUnity M340 tutorialmindlooseNo ratings yet
- Curso PLC Nivel IDocument33 pagesCurso PLC Nivel IGabriel SoteloNo ratings yet
- S7 200Document10 pagesS7 200cbetancourth_35No ratings yet
- IyCnet 01 Introduccion UnityPro-min PDFDocument20 pagesIyCnet 01 Introduccion UnityPro-min PDFcamiloNo ratings yet
- Grafcet&GemmaDocument23 pagesGrafcet&GemmaVictor CarlosNo ratings yet
- WIN CC and TIA PORTALDocument16 pagesWIN CC and TIA PORTALerick rolandoNo ratings yet
- Ejercicios Del 1 Al 4 PDF - Ivan Martinez Arcas.Document13 pagesEjercicios Del 1 Al 4 PDF - Ivan Martinez Arcas.IvanNo ratings yet
- Control Variador Sinamics G120Document121 pagesControl Variador Sinamics G120JAVIER RODRIGUEZNo ratings yet
- Cuestionario PLCDocument4 pagesCuestionario PLClibronuevoNo ratings yet
- TIAPortalOpenness es-ES PDFDocument1,106 pagesTIAPortalOpenness es-ES PDFZenon Nuñonca ZapataNo ratings yet
- Ejemplos LogoDocument36 pagesEjemplos LogoHugo CarhuallanquiNo ratings yet
- C16 5-7 Grafcet 2018-IiDocument55 pagesC16 5-7 Grafcet 2018-IiJose Luis Sovero AstoamanNo ratings yet
- S7-SCL - Getting StartedDocument28 pagesS7-SCL - Getting StartedAdarleen Arevalo ValleNo ratings yet
- Ejercicios PLC 1 y 2Document9 pagesEjercicios PLC 1 y 2Joffre Calvopiña SegoviaNo ratings yet
- Manual de Aplicaciones Micromaster PDFDocument60 pagesManual de Aplicaciones Micromaster PDFMechanicalelectriNo ratings yet
- Ejercicios Varios para LogoDocument3 pagesEjercicios Varios para LogoDaniel ElpaloNo ratings yet
- Automata Programables y Elementos de Potencia (Teorico - Ministerio)Document45 pagesAutomata Programables y Elementos de Potencia (Teorico - Ministerio)Patricio Berbel100% (1)
- CNC Motion Control con PLC S7 1200Document110 pagesCNC Motion Control con PLC S7 1200Carlos GranceNo ratings yet
- Control de motores y equipos industrialesDocument6 pagesControl de motores y equipos industrialesalexander torresNo ratings yet
- Secuencia de tres motores TIA PortalDocument6 pagesSecuencia de tres motores TIA Portalstefany toroNo ratings yet
- Ejercicios Programación PLCs Básico SoMachineDocument11 pagesEjercicios Programación PLCs Básico SoMachineNarciso TorresNo ratings yet
- Programacion AWLDocument45 pagesProgramacion AWLquiquemejiaNo ratings yet
- GRAFCETDocument30 pagesGRAFCETricardo gironNo ratings yet
- Examen Automatas Primer ParcialDocument3 pagesExamen Automatas Primer ParcialEmanuelNo ratings yet
- Guia Laboratorios de PLC LogoDocument23 pagesGuia Laboratorios de PLC Logoluis garcesNo ratings yet
- Control de Nivel Usando El PLC Siemens12Document14 pagesControl de Nivel Usando El PLC Siemens12franco_3210_100% (1)
- Simulación Del RSLogix Emulate 5000Document10 pagesSimulación Del RSLogix Emulate 5000EJASMANYNo ratings yet
- infoPLC Net Guia 3 Instrucciones Basicas en Los Automatas ProgramablesDocument19 pagesinfoPLC Net Guia 3 Instrucciones Basicas en Los Automatas Programablesfuente perezNo ratings yet
- Práctica 1 GrafcetDocument2 pagesPráctica 1 GrafcetjesusmorocoNo ratings yet
- SSP Solucionario U01 PDFDocument17 pagesSSP Solucionario U01 PDFCris Maria De TodosSantosNo ratings yet
- Infoplc Net Manual Formacion Vijeo DesignerDocument130 pagesInfoplc Net Manual Formacion Vijeo DesignerCristóbal Eduardo Carreño MosqueiraNo ratings yet
- Manual Practicas PLCDocument15 pagesManual Practicas PLCBrian M. Carrillo ChairezNo ratings yet
- Programacion de PLC s71200 Con Tia PortalDocument15 pagesProgramacion de PLC s71200 Con Tia PortalCarlos Huaman100% (1)
- Registro temperatura horno PLCDocument6 pagesRegistro temperatura horno PLCJose Manuel Moa PerezNo ratings yet
- Automatización de una isla de prensado y una planta embotelladoraDocument30 pagesAutomatización de una isla de prensado y una planta embotelladoraJorge González GómezNo ratings yet
- Manual Teorico PLCDocument115 pagesManual Teorico PLCDiego Andres Ramos100% (1)
- SIMATIC Sistema de Control de Procesos PCS 7 SFC para SIMATIC S7 (V8.1)Document308 pagesSIMATIC Sistema de Control de Procesos PCS 7 SFC para SIMATIC S7 (V8.1)Mario Alberto ValenciaNo ratings yet
- Manual PLC - Bueno PDFDocument93 pagesManual PLC - Bueno PDFEder Solis100% (3)
- Libro Automatas OmronDocument14 pagesLibro Automatas OmronjboronatsNo ratings yet
- MM420 ProgramaciónDocument12 pagesMM420 ProgramaciónBRAULIONo ratings yet
- Libro GrafcetDocument190 pagesLibro Grafcetmetanoia88No ratings yet
- Programacion de PLC Micrologix 1200 - ABDocument28 pagesProgramacion de PLC Micrologix 1200 - ABgamh13100% (9)
- Pic Simulator Ide ManualDocument74 pagesPic Simulator Ide ManualPac ManNo ratings yet
- 1manual Basico FST 4-10 PDFDocument6 pages1manual Basico FST 4-10 PDFnayis1001033No ratings yet
- Guia Tia Portal y ScadaDocument22 pagesGuia Tia Portal y Scadaeb5ixm100% (1)
- Manual EsahmiDocument66 pagesManual EsahmiLinceNo ratings yet
- LabVIEW OPC SERVER ConfiguracionDocument5 pagesLabVIEW OPC SERVER ConfiguracionGeovanny BarahonaNo ratings yet
- Conexion Studio 5000, EmulateDocument15 pagesConexion Studio 5000, EmulaterafaelNo ratings yet
- Flowcode Manual PDFDocument19 pagesFlowcode Manual PDFCarlos ArangurenNo ratings yet
- Sce Es 010-080 R1209 S7-1200 HmiDocument65 pagesSce Es 010-080 R1209 S7-1200 HmiMarco AntonioNo ratings yet
- SCE ES 010-070 R1209 S7-1200 KommunikationDocument39 pagesSCE ES 010-070 R1209 S7-1200 KommunikationMarco Antonio100% (1)
- Sce Es 010-060 R1209 S7-1200 PidDocument56 pagesSce Es 010-060 R1209 S7-1200 Pidgerman_renkNo ratings yet
- Infoplc Net Ejercicios c1 Introduccion A LabviewDocument14 pagesInfoplc Net Ejercicios c1 Introduccion A LabviewDamian Telecho BlancoNo ratings yet
- Manual ArduinoDocument8 pagesManual ArduinoMarco AntonioNo ratings yet
- SCE ES 010-050 R1209 S7-1200 AnalogwerteDocument34 pagesSCE ES 010-050 R1209 S7-1200 Analogwertegerman_renkNo ratings yet
- GuionLabviewVer 5-6Document42 pagesGuionLabviewVer 5-6kevin100% (2)
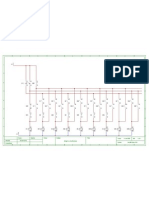
- Esquema 1Document1 pageEsquema 1Marco AntonioNo ratings yet
- Esquema 2Document1 pageEsquema 2Marco AntonioNo ratings yet
- Dispositivo Diferencial - Residual (DR)Document1 pageDispositivo Diferencial - Residual (DR)Marco AntonioNo ratings yet
- Seguridad Puesta A Tierra SchneiderDocument356 pagesSeguridad Puesta A Tierra SchneiderLörinc100% (3)
- Esquema Elétrico - Desafio 2Document1 pageEsquema Elétrico - Desafio 2Marco AntonioNo ratings yet
- Ligar e Desligar Com Apenas Um BotãoDocument1 pageLigar e Desligar Com Apenas Um BotãoMarco AntonioNo ratings yet
- Pioneer DDJ-SB Manual EspañolDocument22 pagesPioneer DDJ-SB Manual EspañolAlfredo PérezNo ratings yet
- PM6 MesaDocument36 pagesPM6 MesacrispiperNo ratings yet
- Arranque en Rampa Motor DCDocument11 pagesArranque en Rampa Motor DCDavidLRPNo ratings yet
- Introducción A DockerDocument32 pagesIntroducción A DockerAlejandro AlcántaraNo ratings yet
- Catálogo Concretos DPX 2016Document12 pagesCatálogo Concretos DPX 2016Kareth Angelica VALBUENA GORDILLONo ratings yet
- Diferencias Entre NAT y ProxyDocument3 pagesDiferencias Entre NAT y ProxyEdson AcostaNo ratings yet
- Guia Del Usuario para El Proceso de Recertificación PDFDocument6 pagesGuia Del Usuario para El Proceso de Recertificación PDFةبهذحجه نحابهبهNo ratings yet
- Presupuesto - S35597Document2 pagesPresupuesto - S35597Eduardo PopNo ratings yet
- Tema 28. HERRAMIENTAS - Rev1Document6 pagesTema 28. HERRAMIENTAS - Rev1Sergio GarcíaNo ratings yet
- MNNBDocument3 pagesMNNBJCarlos Bacilio ReyesNo ratings yet
- Tipos de Sistemas OperativosDocument9 pagesTipos de Sistemas Operativossuareztatiana757No ratings yet
- Cotización Naviera NeptuniaDocument4 pagesCotización Naviera NeptuniaAnonymous nrjd0eq0No ratings yet
- Unidad 7 Conectividad de Bases de DatosDocument6 pagesUnidad 7 Conectividad de Bases de DatosAlberto DiazNo ratings yet
- 2022 Uac Cinfo Dgsu - UnmsmDocument2 pages2022 Uac Cinfo Dgsu - Unmsm...No ratings yet
- Análisis de Riego (IEC 62305)Document10 pagesAnálisis de Riego (IEC 62305)IVAN TURCONo ratings yet
- RESUMENDocument2 pagesRESUMENJUAN MANUEL OSORIONo ratings yet
- Cálculo del equipamiento comunitarioDocument35 pagesCálculo del equipamiento comunitarioSigMacTerritorio100% (2)
- 39 Instalaciones Eléctricas IDocument2 pages39 Instalaciones Eléctricas IEdgar Vidal Espinoza OrtegaNo ratings yet
- Impacto y Alcance Del Derecho en La InformaticaDocument4 pagesImpacto y Alcance Del Derecho en La InformaticaPaolo Anghelo Nieto AldanaNo ratings yet
- PagoDocument3 pagesPagodeillyNo ratings yet
- Entregable 3 Tareas 6 7 Edicin 2023Document3 pagesEntregable 3 Tareas 6 7 Edicin 2023Sofia AceitunoNo ratings yet
- Los Reptilianos y La Prisión Holográf... (Z-Library)Document16 pagesLos Reptilianos y La Prisión Holográf... (Z-Library)Adrián Pérez OrdóñezNo ratings yet
- Metodo ACI 211Document1 pageMetodo ACI 211jpierre escobNo ratings yet
- Copia de FOLLARI Robero - La Selva Académica Cap I y VDocument16 pagesCopia de FOLLARI Robero - La Selva Académica Cap I y VjulianvidelaNo ratings yet
- Ábaco de Regnier Y Análisis MorfológicoDocument6 pagesÁbaco de Regnier Y Análisis MorfológicoNelson Joshua Moreno MaciasNo ratings yet
- Accionamiento EléctricoDocument41 pagesAccionamiento EléctricoBRAYAN ALEXIS FRE BARRERANo ratings yet
- Maíz TMF Morelos PV 2023Document4 pagesMaíz TMF Morelos PV 2023Hernández Moreno Cristhian RossmarlyNo ratings yet
- Justificacion y ObjetivosDocument5 pagesJustificacion y ObjetivosOriana EsquedaNo ratings yet
- Paper - IEEE Practica 3Document6 pagesPaper - IEEE Practica 3Aleja OrtegaNo ratings yet
- La Inteligencia Artificial en La Union Europea y en Es Cercel Maria DanielaDocument48 pagesLa Inteligencia Artificial en La Union Europea y en Es Cercel Maria Danielabelita1100% (1)