You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- De Lab Manual-EEE New1Document77 pagesDe Lab Manual-EEE New1selva_raj215414No ratings yet
- Littelfuse Using High Voltage TVS Diodes in IGBT Active Clamp Application NoteDocument6 pagesLittelfuse Using High Voltage TVS Diodes in IGBT Active Clamp Application NoteSantiago Federico Barrera BoadaNo ratings yet
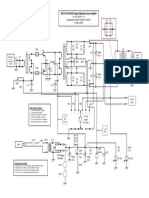
- SSB Amp Diagram 400w IRFP460Document1 pageSSB Amp Diagram 400w IRFP460Av PlugaruNo ratings yet
- K3A40L Maintenance - Huake Power Supply Charging Module MaintenanceDocument3 pagesK3A40L Maintenance - Huake Power Supply Charging Module Maintenancelikhon.likeNo ratings yet
- Datasheet 18Document3 pagesDatasheet 18José A.No ratings yet
- Des 1024dDocument2 pagesDes 1024dbxlmichael8837No ratings yet
- 05258870Document12 pages05258870shirtquittersNo ratings yet
- Sailor 6222 VHF DSC Class A Product SheetDocument2 pagesSailor 6222 VHF DSC Class A Product SheetWAPPNo ratings yet
- 10 M 04 SCDocument11 pages10 M 04 SCVenkatGollaNo ratings yet
- Lab 8 PWM Rev1Document12 pagesLab 8 PWM Rev1s.sudeshNo ratings yet
- Realtek Rtl8196e PDFDocument79 pagesRealtek Rtl8196e PDFYeison RengifoNo ratings yet
- Comprehensive Analysis of UFMC With OFDM and FBMCDocument7 pagesComprehensive Analysis of UFMC With OFDM and FBMCpabloNo ratings yet
- HCC/HCF40101B: 9-Bit Parity Generator/CheckerDocument11 pagesHCC/HCF40101B: 9-Bit Parity Generator/CheckerGoodLookingPirateNo ratings yet
- Digital Transmission: Solutions To Review Questions and ExercisesDocument11 pagesDigital Transmission: Solutions To Review Questions and ExercisesAq RaufNo ratings yet
- Debug 1214Document65 pagesDebug 1214Kasi H AnggaraNo ratings yet
- Implementation of PSR in Flyback ConvertersDocument9 pagesImplementation of PSR in Flyback ConvertersNehaoua FaresNo ratings yet
- Diodo BZXDocument3 pagesDiodo BZXAndrey SilvaNo ratings yet
- Adc14x250 PDFDocument70 pagesAdc14x250 PDFJuan BoggianoNo ratings yet
- Gto804 Gto1002d Gto1004d Gto1202d Gto1204d Gto1502d Gto1504dDocument4 pagesGto804 Gto1002d Gto1004d Gto1202d Gto1204d Gto1502d Gto1504dIordan Dan FfnNo ratings yet
- P3 - 19 - Boolean Algebra and Logic CircuitsDocument27 pagesP3 - 19 - Boolean Algebra and Logic CircuitsDhruv SNo ratings yet
- Fabrication Mod 2Document16 pagesFabrication Mod 2albin shajanNo ratings yet
- PN PN Koppler enDocument104 pagesPN PN Koppler enSagar PawarNo ratings yet
- Velocity Feedback: Opposes The Demand Input. Assists The Demand Input. Prevents Dead Space ErrorsDocument1 pageVelocity Feedback: Opposes The Demand Input. Assists The Demand Input. Prevents Dead Space ErrorsSantosh BasnetNo ratings yet
- Bridge Sensor Signal Conditioner IC With LIN Interface, Nonlinearity Correction, Temperature CompensationDocument12 pagesBridge Sensor Signal Conditioner IC With LIN Interface, Nonlinearity Correction, Temperature CompensationOmar EzzNo ratings yet
- NA011 Manual (En)Document90 pagesNA011 Manual (En)John Alexander50% (2)
- Px7103 Analysis and Design of InvertersDocument3 pagesPx7103 Analysis and Design of InvertersRoja0% (1)
- Relay Setting For 7ut51 Differential Protection RelayDocument12 pagesRelay Setting For 7ut51 Differential Protection Relayyesrojas100% (1)
- Downloaded From Manuals Search EngineDocument14 pagesDownloaded From Manuals Search EngineyomismoNo ratings yet