You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 500-600 Forklifts & Buckmaster: Parts CatalogDocument281 pages500-600 Forklifts & Buckmaster: Parts CatalogRoberto Mariano100% (2)
- Sjoblom, J. - Handbook of Emulsion Technology PDFDocument731 pagesSjoblom, J. - Handbook of Emulsion Technology PDFdcharlies92% (13)
- K - FactorTransformerDocument5 pagesK - FactorTransformerAnonymous BanTco100% (1)
- ProbabilityDocument28 pagesProbabilitytamann2004No ratings yet
- J.M. Hurst Cyclic AnalysisDocument45 pagesJ.M. Hurst Cyclic AnalysisChristian Robinson80% (10)
- Marine Lubricants Equivalents List: Sae 50 TBN 57 Sae 50 TBN 55 Sae 40 TBN 60 Sae 50 TBN 50 Sae 50 TBN 55Document3 pagesMarine Lubricants Equivalents List: Sae 50 TBN 57 Sae 50 TBN 55 Sae 40 TBN 60 Sae 50 TBN 50 Sae 50 TBN 55spyros_peiraiasNo ratings yet
- Autodesk Inventor - Sheet Metal Punch IfeaturesDocument6 pagesAutodesk Inventor - Sheet Metal Punch IfeaturesNdianabasi UdonkangNo ratings yet
- Oil & Gas Asset Integrity IssuesDocument15 pagesOil & Gas Asset Integrity Issuesyogolain100% (2)
- Skytrain Avia Services: Emergency Procedures ManualDocument32 pagesSkytrain Avia Services: Emergency Procedures ManualEndro RastadiNo ratings yet
- Bs en 00378 3 2016Document30 pagesBs en 00378 3 2016Darius VinNo ratings yet
- Noise and Vibration During CosntructionDocument12 pagesNoise and Vibration During Cosntructionpierre3101No ratings yet
- FFSQP Manual PDFDocument46 pagesFFSQP Manual PDFtamann2004No ratings yet
- Quality Objectives - E 091201 PDFDocument1 pageQuality Objectives - E 091201 PDFtamann2004No ratings yet
- Ijater 04 22 PDFDocument6 pagesIjater 04 22 PDFtamann2004No ratings yet
- Noise Pollution PDFDocument32 pagesNoise Pollution PDFHassan AliNo ratings yet
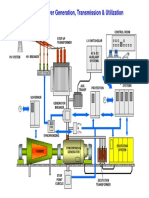
- توليد وإستخدامDocument1 pageتوليد وإستخدامtamann2004100% (1)
- Publication Design and Engineering ch41 Ddot PDFDocument24 pagesPublication Design and Engineering ch41 Ddot PDFtamann2004No ratings yet
- Series Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission LinesDocument3 pagesSeries Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission Linestamann2004No ratings yet
- TARIFFSDocument32 pagesTARIFFStamann2004No ratings yet
- A Basic Introduction To Neural NetworksDocument6 pagesA Basic Introduction To Neural Networkstamann2004No ratings yet
- Seasonality: T T T TDocument38 pagesSeasonality: T T T Ttamann2004No ratings yet
- Single-Tuned Passive Harmonic Filter Design Considering Variances of Tuning and Quality Factor PDFDocument7 pagesSingle-Tuned Passive Harmonic Filter Design Considering Variances of Tuning and Quality Factor PDFtamann2004No ratings yet
- Fractional Order Derivative and Integral Using LabVIEWDocument13 pagesFractional Order Derivative and Integral Using LabVIEWauraliusNo ratings yet
- Woson 23 Litre B Class Touch AutoclaveDocument2 pagesWoson 23 Litre B Class Touch AutoclaveBashar MohammadNo ratings yet
- C12200Document3 pagesC12200xgiorg100% (1)
- D6489 PDFDocument3 pagesD6489 PDFKalindaMadusankaDasanayakaNo ratings yet
- RequirementsDocument18 pagesRequirementsmpedraza-1No ratings yet
- Softening N Penetration Test BitumenDocument11 pagesSoftening N Penetration Test BitumenEdwin LeonNo ratings yet
- Rational Suite ToolsDocument47 pagesRational Suite ToolsZatin GuptaNo ratings yet
- Huawei ACU2 Wireless Access Controller DatasheetDocument12 pagesHuawei ACU2 Wireless Access Controller Datasheetdexater007No ratings yet
- Internship Report May 2016Document11 pagesInternship Report May 2016Rupini RagaviahNo ratings yet
- Justine J. Beroy: Career ObjectivesDocument5 pagesJustine J. Beroy: Career ObjectivesJustine BeroyNo ratings yet
- SemDocument31 pagesSemkaushik4208No ratings yet
- Prospects For Alkaline Zero Gap Water Electrolysers For Hydrogen ProductionDocument16 pagesProspects For Alkaline Zero Gap Water Electrolysers For Hydrogen Productionkhan47pkNo ratings yet
- SQ Presentation 2021-r2Document43 pagesSQ Presentation 2021-r2nadeem4ahmed-805026No ratings yet
- Steel Top Hats Battens Capacitytables Product Technical ManualDocument16 pagesSteel Top Hats Battens Capacitytables Product Technical ManualbhukthaNo ratings yet
- Selenium-75 Sources and Source Holders: ApplicationsDocument2 pagesSelenium-75 Sources and Source Holders: ApplicationsTanpreet SinghNo ratings yet
- Behringer UB2222FX PRODocument5 pagesBehringer UB2222FX PROmtlcaqc97 mtlcaqc97No ratings yet
- 25252525Document38 pages25252525Ivan GonzalezNo ratings yet
- Hot Wire Anemometry HandoutDocument4 pagesHot Wire Anemometry HandoutZ-BNo ratings yet
- EN RotomaticDocument4 pagesEN RotomaticnajeerwNo ratings yet
- Bubbling Kun NiDocument7 pagesBubbling Kun NiBelen CRNo ratings yet