You might also like
- EE402 Lecture 2Document10 pagesEE402 Lecture 2sdfgNo ratings yet
- MA124: Maths by Computer - Week 5: Thomas Dove and Kyle Byrne February 8, 2015Document8 pagesMA124: Maths by Computer - Week 5: Thomas Dove and Kyle Byrne February 8, 2015Kyle ByrneNo ratings yet
- Partial Derv ExplainedDocument3 pagesPartial Derv ExplainedShivaPrasadNo ratings yet
- Spotlight PropertiesWaveEquationsDocument6 pagesSpotlight PropertiesWaveEquationsAlisonNo ratings yet
- Optimal and Robust Estimation With An Introduction To Stochastic Control TheoryDocument8 pagesOptimal and Robust Estimation With An Introduction To Stochastic Control TheoryAhtisham195No ratings yet
- On Solving Periodic Riccati Equations: A. VargaDocument27 pagesOn Solving Periodic Riccati Equations: A. VargaKarad KaradiasNo ratings yet
- Lattice Boltzmann Methods For Solving Partial Differential Equations of Exotic Option PricingDocument18 pagesLattice Boltzmann Methods For Solving Partial Differential Equations of Exotic Option PricingMauricio Fabian Duque DazaNo ratings yet
- One Dimension Free Fermions Green's Function: Ext ExtDocument6 pagesOne Dimension Free Fermions Green's Function: Ext ExtMatheus SchosslerNo ratings yet
- Dynamics and Differential EquationsDocument30 pagesDynamics and Differential EquationsHusseinali HusseinNo ratings yet
- Signal SpaceDocument3 pagesSignal SpaceAbhishek_SafuiNo ratings yet
- EEE 303 HW # 1 SolutionsDocument22 pagesEEE 303 HW # 1 SolutionsDhirendra Kumar SinghNo ratings yet
- Dupire FormulaDocument2 pagesDupire FormulaJohn SmithNo ratings yet
- Polynomials: ! W W L Chen, 1984, 2013Document5 pagesPolynomials: ! W W L Chen, 1984, 2013Ehab AhmedNo ratings yet
- Complex Integrals PDFDocument51 pagesComplex Integrals PDFVIKAS SHUKLANo ratings yet
- Antonela Ism Ch08Document66 pagesAntonela Ism Ch08DVS2monaNo ratings yet
- Chapter 2 - State Space FundamentalsDocument60 pagesChapter 2 - State Space FundamentalsaaaaaaaaaaaaaaaaaaaaaaaaaNo ratings yet
- 6 LQ, LQG, H, H Control System Design: 6.1 LQ: Linear Systems With Quadratic Performance Cri-TeriaDocument22 pages6 LQ, LQG, H, H Control System Design: 6.1 LQ: Linear Systems With Quadratic Performance Cri-TeriaAli AzanNo ratings yet
- The Time Evolution Operator As A Time-Ordered ExponentialDocument8 pagesThe Time Evolution Operator As A Time-Ordered ExponentialMonky PandaNo ratings yet
- (T) vs. T XDocument12 pages(T) vs. T X林哲侃No ratings yet
- Internal Observability of The Wave Equation in Tiled DomainsDocument16 pagesInternal Observability of The Wave Equation in Tiled DomainsSalman 1stINANo ratings yet
- Using The Fourier Transform To Solve PdesDocument4 pagesUsing The Fourier Transform To Solve PdesPeyton ShiNo ratings yet
- Principles of DiscretizationDocument4 pagesPrinciples of DiscretizationmanmohancqNo ratings yet
- Chapter 6: Input-Output StabilityDocument6 pagesChapter 6: Input-Output StabilityelectrotehnicaNo ratings yet
- Optimization Dynamic Vibration Absorbers Vibration Suppression PlatesDocument6 pagesOptimization Dynamic Vibration Absorbers Vibration Suppression Platessundaramaks saravana muruganNo ratings yet
- Bahadur's TheoremDocument6 pagesBahadur's TheoremSwapnaneel BhattacharyyaNo ratings yet
- 10 Function Spaces: 10.1 Ordinary Linear Differential EquationsDocument15 pages10 Function Spaces: 10.1 Ordinary Linear Differential EquationsBruno PretoNo ratings yet
- Linear System Ramsey Phase GraphDocument15 pagesLinear System Ramsey Phase Graphmarithzahh9416No ratings yet
- Feedback Example: The Inverted Pendulum: Recommended ProblemsDocument10 pagesFeedback Example: The Inverted Pendulum: Recommended Problemsam1liNo ratings yet
- Math 6338: Real Analysis II Final Exam Due: Friday May 4 2012 at 5:00pmDocument3 pagesMath 6338: Real Analysis II Final Exam Due: Friday May 4 2012 at 5:00pmFabian MolinaNo ratings yet
- Lec 0813Document10 pagesLec 0813Chevy TeoNo ratings yet
- Physics 219 Summary of Linear Response TheoryDocument5 pagesPhysics 219 Summary of Linear Response TheoryAmeer BashaNo ratings yet
- Existence and Continuous Dependence of Solutions of A Neutral Functional-Differential EquationDocument18 pagesExistence and Continuous Dependence of Solutions of A Neutral Functional-Differential EquationHo Nhat NamNo ratings yet
- Peano BakerDocument6 pagesPeano BakerthgnguyenNo ratings yet
- Evolutional Equations of Parabolic Type, Hiroki Tanabe, 1961Document4 pagesEvolutional Equations of Parabolic Type, Hiroki Tanabe, 1961Fis MatNo ratings yet
- MMSB Exercise SolutionsDocument49 pagesMMSB Exercise SolutionsYolanda Winarny Eviphanie HutabaratNo ratings yet
- Ring Theoretical Method of Calculating First Extension Groups of Certain Modules Over Certain RingDocument8 pagesRing Theoretical Method of Calculating First Extension Groups of Certain Modules Over Certain Ringnoether2978No ratings yet
- H2-Optimal Control - Lec8Document83 pagesH2-Optimal Control - Lec8stara123warNo ratings yet
- Merton Lifetime Portfolio Selection 1969Document11 pagesMerton Lifetime Portfolio Selection 1969bboyvnNo ratings yet
- 1 s2.0 0022247X9090088W Main PDFDocument5 pages1 s2.0 0022247X9090088W Main PDFJohan Habid Orozco AraujoNo ratings yet
- Application 8Document4 pagesApplication 8Dr. Ir. R. Didin Kusdian, MT.No ratings yet
- sns 2022 중간Document2 pagessns 2022 중간juyeons0204No ratings yet
- sns 2021 기말 (온라인)Document2 pagessns 2021 기말 (온라인)juyeons0204No ratings yet
- Ber KaneDocument6 pagesBer KaneSamar AhmedNo ratings yet
- Communication Systems Simon Haykin 4edDocument559 pagesCommunication Systems Simon Haykin 4edshilpisabhikhi100% (4)
- Winitzki - Derivation of WKB ApproximationDocument2 pagesWinitzki - Derivation of WKB ApproximationwinitzkiNo ratings yet
- ResearchDocument4 pagesResearchAamir MukhtarNo ratings yet
- Charnes & CooperDocument6 pagesCharnes & CooperBinhNo ratings yet
- ENSC380 Objectives: Learn How To Find The Impulse Response of A CT-LTI System Learn How To Represent A System (DT or CT) in Form of A Block DiagramDocument10 pagesENSC380 Objectives: Learn How To Find The Impulse Response of A CT-LTI System Learn How To Represent A System (DT or CT) in Form of A Block DiagramhpahbpNo ratings yet
- Fourier Transform To Solve PDEDocument4 pagesFourier Transform To Solve PDErisehighNo ratings yet
- Discrete Time Observers and LQG Control: Massachusetts Institute of Technology 2.151 Advanced System Dynamics and ControlDocument8 pagesDiscrete Time Observers and LQG Control: Massachusetts Institute of Technology 2.151 Advanced System Dynamics and ControldanyetnNo ratings yet
- EEM 342 Fundamentals of Control Systems: Notes For Week 13: Discrete-Time SystemsDocument40 pagesEEM 342 Fundamentals of Control Systems: Notes For Week 13: Discrete-Time Systemscode w -denNo ratings yet
- Transfer Functions For Infinite-Dimensional SystemsDocument9 pagesTransfer Functions For Infinite-Dimensional SystemsthgnguyenNo ratings yet
- Entropy: Quantum Dynamics in A Fluctuating EnvironmentDocument13 pagesEntropy: Quantum Dynamics in A Fluctuating EnvironmentkenfackNo ratings yet
- Scaling Concept and The Williams-Landei-Ferry Relationship: Ax (T-TS)Document5 pagesScaling Concept and The Williams-Landei-Ferry Relationship: Ax (T-TS)milena1995No ratings yet
- Problem Set 3: More On The Ramsey Model: Problem 1 - Social Planner ProblemDocument11 pagesProblem Set 3: More On The Ramsey Model: Problem 1 - Social Planner ProblemDaniel GNo ratings yet
- HW3 SolnDocument12 pagesHW3 SolnDanny MejíaNo ratings yet
- MechanicsDynamicsMechanisms Chapter3Document16 pagesMechanicsDynamicsMechanisms Chapter3ruchiraNo ratings yet
- Convolution: Figure 1 A Linear, Time-Invariant CircuitDocument6 pagesConvolution: Figure 1 A Linear, Time-Invariant CircuitSelectron SelectronaNo ratings yet
- ICARCV 2018: Call For PapersDocument1 pageICARCV 2018: Call For Papersem01803257No ratings yet
- 304 - Fms - Transilon Calculation Methods Conveyor Belts - en PDFDocument16 pages304 - Fms - Transilon Calculation Methods Conveyor Belts - en PDFAndressa EgerNo ratings yet
- Lagrange PDFDocument1 pageLagrange PDFem01803257No ratings yet
- 2178 Neural Decoding of Cursor Motion Using A Kalman FilterDocument8 pages2178 Neural Decoding of Cursor Motion Using A Kalman Filterem01803257No ratings yet
- Core ManualDocument72 pagesCore ManualAnonymous N22tyB6UNNo ratings yet
- Motor Selection: Introduction and ExamplesDocument11 pagesMotor Selection: Introduction and ExamplesWeerasak PiraksaNo ratings yet
- Information Introduction To Melbourne Bushwalkers Ver 1.1!12!2013Document4 pagesInformation Introduction To Melbourne Bushwalkers Ver 1.1!12!2013em01803257No ratings yet
- Monash University Airport Arrival Instructions For Commencing StudentsDocument1 pageMonash University Airport Arrival Instructions For Commencing Studentsem01803257No ratings yet
- SCL Cheat SheetDocument2 pagesSCL Cheat SheetboegschroefNo ratings yet
- Hmi Paper - 2012 Asee Paper Final Ver To Be Uploaded 03-11-2012 PDFDocument14 pagesHmi Paper - 2012 Asee Paper Final Ver To Be Uploaded 03-11-2012 PDFem01803257No ratings yet
- Data StyleDocument98 pagesData Stylehb40779No ratings yet
- Manual For Package PgfplotsDocument235 pagesManual For Package Pgfplotselloco1031No ratings yet
- SCL Cheat SheetDocument2 pagesSCL Cheat SheetboegschroefNo ratings yet
- Models AppendicesDocument26 pagesModels Appendicesem01803257No ratings yet
- Pt100 Transmitter MicrochipDocument8 pagesPt100 Transmitter Microchipem01803257No ratings yet
- C106DDocument9 pagesC106Djoel_gaucinNo ratings yet
- Multiturn TrimpotDocument1 pageMultiturn Trimpotem01803257No ratings yet
- 19174the Rise of Industrial Big Data WP Gft834Document6 pages19174the Rise of Industrial Big Data WP Gft834em01803257No ratings yet
- E8Document7 pagesE8pavanNo ratings yet
- A Cop I An Cat Mini SwitcherDocument7 pagesA Cop I An Cat Mini Switcherem01803257No ratings yet
- Basic Association RulesDocument12 pagesBasic Association Rulesem01803257No ratings yet
- Basic Association RulesDocument12 pagesBasic Association Rulesem01803257No ratings yet
- 100 IdeasDocument2 pages100 Ideasjeanmarc100% (9)
- 100 IdeasDocument2 pages100 Ideasjeanmarc100% (9)
- Zest O CorporationDocument21 pagesZest O CorporationJhamane Chan53% (15)
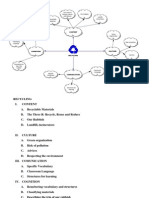
- Recycling Mind MapDocument2 pagesRecycling Mind Mapmsole124100% (1)
- Chapter 5 AGVDocument76 pagesChapter 5 AGVQuỳnh NguyễnNo ratings yet
- Time Value of Money LectureDocument54 pagesTime Value of Money LectureRanin, Manilac Melissa SNo ratings yet
- Index PDFDocument159 pagesIndex PDFHüseyin IşlakNo ratings yet
- 1.1 The Prescription of Blood ComponentsDocument9 pages1.1 The Prescription of Blood ComponentsagurtovicNo ratings yet
- Propert 447-445Document11 pagesPropert 447-445LUNA100% (1)
- Contact Inform 2002 PDFDocument24 pagesContact Inform 2002 PDFFrank AlmeidaNo ratings yet
- Sci NB Mod 2 LSN 3Document4 pagesSci NB Mod 2 LSN 3Ramses octavio Rodriguez ocanasNo ratings yet
- ST 36Document4 pagesST 36ray72roNo ratings yet
- Application of PCA-CNN (Principal Component Analysis - Convolutional Neural Networks) Method On Sentinel-2 Image Classification For Land Cover MappingDocument5 pagesApplication of PCA-CNN (Principal Component Analysis - Convolutional Neural Networks) Method On Sentinel-2 Image Classification For Land Cover MappingIJAERS JOURNALNo ratings yet
- Leadership Games and ActivitiesDocument38 pagesLeadership Games and ActivitiesWilliam Oliss100% (1)
- Accsap 10 VHDDocument94 pagesAccsap 10 VHDMuhammad Javed Gaba100% (2)
- 20160323014547-16MnCr5 - 16MnCrS5Document1 page20160323014547-16MnCr5 - 16MnCrS5Chaitanya DattaNo ratings yet
- Opex and CapexDocument5 pagesOpex and CapexATM Shafiq Ul AlamNo ratings yet
- Siemens Internship ReportDocument84 pagesSiemens Internship Reportujjawalbhojawala100% (1)
- Tuesday, 16 November 2021 - Afternoon Discovering ElectronicsDocument20 pagesTuesday, 16 November 2021 - Afternoon Discovering Electronicsnvmalt070No ratings yet
- Kwasaki ZX10R 16Document101 pagesKwasaki ZX10R 16OliverNo ratings yet
- Plato: Epistemology: Nicholas WhiteDocument2 pagesPlato: Epistemology: Nicholas WhiteAnonymous HCqIYNvNo ratings yet
- The Wilson Quarterly: The World's New Numbers by Martin WalkerDocument13 pagesThe Wilson Quarterly: The World's New Numbers by Martin WalkerDavid WeekNo ratings yet
- UC Lennox Serie 13 Acx Merit R-410aDocument52 pagesUC Lennox Serie 13 Acx Merit R-410ajmurcia80No ratings yet
- Milviz F-15e Poh V 2Document499 pagesMilviz F-15e Poh V 2Jose Ramon Martinez GutierrezNo ratings yet
- Unit 2 - Presentations (Image, Impact and Making An Impression) 2Document25 pagesUnit 2 - Presentations (Image, Impact and Making An Impression) 2LK Chiarra Panaligan100% (1)
- Yadea User Manual For e Scooter 1546004910Document44 pagesYadea User Manual For e Scooter 1546004910Danthe ThenadNo ratings yet
- Hot Topic 02 Good Light Magazine 56smDocument24 pagesHot Topic 02 Good Light Magazine 56smForos IscNo ratings yet
- Physics 101Document21 pagesPhysics 101Kuna KunavathiNo ratings yet
- Stanley B. Alpern - Amazons of Black Sparta - The Women Warriors of Dahomey-New York University Press (2011)Document308 pagesStanley B. Alpern - Amazons of Black Sparta - The Women Warriors of Dahomey-New York University Press (2011)georgemultiplusNo ratings yet
- Natural Disasters Vocabulary Exercises Fun Activities Games Icebreakers Oneonone Activiti 42747Document2 pagesNatural Disasters Vocabulary Exercises Fun Activities Games Icebreakers Oneonone Activiti 42747Andrea Tercero VillarroelNo ratings yet
- Maths All FormulasDocument5 pagesMaths All FormulasVishnuNo ratings yet
- STEM Labs for Physical Science, Grades 6 - 8From EverandSTEM Labs for Physical Science, Grades 6 - 8Rating: 3.5 out of 5 stars3.5/5 (6)
- Lower Secondary Science Workbook: Stage 8From EverandLower Secondary Science Workbook: Stage 8Rating: 5 out of 5 stars5/5 (1)
- How to Teach Nature Journaling: Curiosity, Wonder, AttentionFrom EverandHow to Teach Nature Journaling: Curiosity, Wonder, AttentionRating: 4.5 out of 5 stars4.5/5 (3)
- Quantum Physics for Beginners: Simple Illustrated Guide to Discover with Practical Explanations the Paradoxes of the Life and Universe Reconsidering RealityFrom EverandQuantum Physics for Beginners: Simple Illustrated Guide to Discover with Practical Explanations the Paradoxes of the Life and Universe Reconsidering RealityRating: 2 out of 5 stars2/5 (1)
- Interactive Science Notebook: The Human Body WorkbookFrom EverandInteractive Science Notebook: The Human Body WorkbookRating: 4 out of 5 stars4/5 (2)
- How Do Cell Phones Work? Technology Book for Kids | Children's How Things Work BooksFrom EverandHow Do Cell Phones Work? Technology Book for Kids | Children's How Things Work BooksNo ratings yet
- A-level Biology Revision: Cheeky Revision ShortcutsFrom EverandA-level Biology Revision: Cheeky Revision ShortcutsRating: 5 out of 5 stars5/5 (5)
- AI and the Future of Education: Teaching in the Age of Artificial IntelligenceFrom EverandAI and the Future of Education: Teaching in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (1)
- Nature-Based Learning for Young Children: Anytime, Anywhere, on Any BudgetFrom EverandNature-Based Learning for Young Children: Anytime, Anywhere, on Any BudgetRating: 5 out of 5 stars5/5 (1)
- How to Think Like a Lawyer--and Why: A Common-Sense Guide to Everyday DilemmasFrom EverandHow to Think Like a Lawyer--and Why: A Common-Sense Guide to Everyday DilemmasRating: 3 out of 5 stars3/5 (1)
- Interactive Notebook: Life Science, Grades 5 - 8From EverandInteractive Notebook: Life Science, Grades 5 - 8Rating: 5 out of 5 stars5/5 (4)
- The Periodic Table of Elements - Post-Transition Metals, Metalloids and Nonmetals | Children's Chemistry BookFrom EverandThe Periodic Table of Elements - Post-Transition Metals, Metalloids and Nonmetals | Children's Chemistry BookNo ratings yet
- The Periodic Table of Elements - Alkali Metals, Alkaline Earth Metals and Transition Metals | Children's Chemistry BookFrom EverandThe Periodic Table of Elements - Alkali Metals, Alkaline Earth Metals and Transition Metals | Children's Chemistry BookNo ratings yet
- The Big Book of Nature Activities: A Year-Round Guide to Outdoor LearningFrom EverandThe Big Book of Nature Activities: A Year-Round Guide to Outdoor LearningRating: 5 out of 5 stars5/5 (3)
- Nature Preschools and Forest Kindergartens: The Handbook for Outdoor LearningFrom EverandNature Preschools and Forest Kindergartens: The Handbook for Outdoor LearningRating: 3.5 out of 5 stars3.5/5 (3)
- A-Level Chemistry Revision: Cheeky Revision ShortcutsFrom EverandA-Level Chemistry Revision: Cheeky Revision ShortcutsRating: 4 out of 5 stars4/5 (5)
- Static Electricity (Where does Lightning Come From): 2nd Grade Science Workbook | Children's Electricity Books EditionFrom EverandStatic Electricity (Where does Lightning Come From): 2nd Grade Science Workbook | Children's Electricity Books EditionNo ratings yet