You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- AD - GT3L - Man-HW EN 12-07 1000073210 c1Document128 pagesAD - GT3L - Man-HW EN 12-07 1000073210 c1Mohamed Alkharashy100% (1)
- Voltage Sag Mitigation in Electric Arc Furnace With D-STATCOMDocument7 pagesVoltage Sag Mitigation in Electric Arc Furnace With D-STATCOMPudhur Kannan ManiNo ratings yet
- AC Superdrive (ACS) : DescriptionDocument2 pagesAC Superdrive (ACS) : DescriptionMamadou djibril BaNo ratings yet
- EM Vibration RangesDocument1 pageEM Vibration RangespmkarNo ratings yet
- TVR LX - Heat Pump - Technical Service ManualDocument106 pagesTVR LX - Heat Pump - Technical Service ManualJesusNo ratings yet
- Compressor IRN200H-Of - Operacao, Manutencao, InstalacaoDocument72 pagesCompressor IRN200H-Of - Operacao, Manutencao, InstalacaoTiago MenezesNo ratings yet
- Icaaet 960Document6 pagesIcaaet 960Pudhur Kannan ManiNo ratings yet
- Core Test ProgramDocument12 pagesCore Test ProgramPudhur Kannan ManiNo ratings yet
- 1 s2.0 S2212671612001266 Main PDFDocument7 pages1 s2.0 S2212671612001266 Main PDFPudhur Kannan ManiNo ratings yet
- Icbdm 29 PDFDocument6 pagesIcbdm 29 PDFPudhur Kannan ManiNo ratings yet
- Access Denied The Page Is Blocked Due To Vel Tech Multi Tech Security Policy That Prohibits Access To Category DefaultDocument4 pagesAccess Denied The Page Is Blocked Due To Vel Tech Multi Tech Security Policy That Prohibits Access To Category DefaultPudhur Kannan ManiNo ratings yet
- May 77Document79 pagesMay 77Pudhur Kannan ManiNo ratings yet
- Jeas 0515 1961 PDFDocument6 pagesJeas 0515 1961 PDFPudhur Kannan ManiNo ratings yet
- Icaaet 502 PDFDocument6 pagesIcaaet 502 PDFPudhur Kannan ManiNo ratings yet
- Tutorial On Fuzzy Logic Applications in Power SystemsDocument87 pagesTutorial On Fuzzy Logic Applications in Power Systemseomr20No ratings yet
- TNLDocument6 pagesTNLPudhur Kannan ManiNo ratings yet
- CF 2 D 62 C 304 Dba 85Document5 pagesCF 2 D 62 C 304 Dba 85Pudhur Kannan ManiNo ratings yet
- Access Denied The Page Is Blocked Due To Vel Tech Multi Tech Security Policy That Prohibits Access To Category DefaultDocument6 pagesAccess Denied The Page Is Blocked Due To Vel Tech Multi Tech Security Policy That Prohibits Access To Category DefaultPudhur Kannan ManiNo ratings yet
- PDFDocument7 pagesPDFPudhur Kannan ManiNo ratings yet
- PDFDocument9 pagesPDFPudhur Kannan ManiNo ratings yet
- TVDocument6 pagesTVPudhur Kannan ManiNo ratings yet
- Traffic and power routing algorithm for NOC coresDocument1 pageTraffic and power routing algorithm for NOC coresPudhur Kannan ManiNo ratings yet
- Simulaciones de Electrónica de Potencia en PspiceDocument63 pagesSimulaciones de Electrónica de Potencia en PspiceCarlos Iván RuedaNo ratings yet
- Paper 2Document7 pagesPaper 2Pudhur Kannan ManiNo ratings yet
- Mani R & D Meeting 28.07.2013Document13 pagesMani R & D Meeting 28.07.2013Pudhur Kannan ManiNo ratings yet
- Lab Manuals - Ee-352 Ec-Ii LabDocument61 pagesLab Manuals - Ee-352 Ec-Ii LabKabil DevNo ratings yet
- Veltech Multitech DR - RR& Dr. SR Engineering College Technical English UNIT I (FEB 2014)Document2 pagesVeltech Multitech DR - RR& Dr. SR Engineering College Technical English UNIT I (FEB 2014)Pudhur Kannan ManiNo ratings yet
- IndexDocument99 pagesIndexPudhur Kannan ManiNo ratings yet
- StatcomDocument6 pagesStatcomsudheer868No ratings yet
- Statcom Mitigates Flicker from Electric Arc Furnace in Steel PlantDocument5 pagesStatcom Mitigates Flicker from Electric Arc Furnace in Steel PlantPudhur Kannan ManiNo ratings yet
- Power Quality Impacts of An Electric Arc Furnace and Its CompensationDocument8 pagesPower Quality Impacts of An Electric Arc Furnace and Its CompensationPudhur Kannan ManiNo ratings yet
- Eaf Voltage Flicker Mitigation by Facts EssDocument7 pagesEaf Voltage Flicker Mitigation by Facts EssPudhur Kannan ManiNo ratings yet
- 1C 5 1Document10 pages1C 5 1Pudhur Kannan ManiNo ratings yet
- 6 2 6Document10 pages6 2 6Pudhur Kannan ManiNo ratings yet
- Series ECO ENDocument182 pagesSeries ECO ENأبو أنس المسلمNo ratings yet
- Technical Reference OverviewDocument17 pagesTechnical Reference OverviewHery Vázquez JiménezNo ratings yet
- Catalogo Motores Siemens PDFDocument176 pagesCatalogo Motores Siemens PDFgiovanni1912No ratings yet
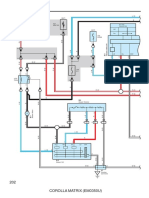
- Air Conditioning: 202 Corolla Matrix (Em0350U)Document6 pagesAir Conditioning: 202 Corolla Matrix (Em0350U)Miguel AngelNo ratings yet
- Practical Testing of Dynamo Motor PDFDocument254 pagesPractical Testing of Dynamo Motor PDFMukesh KumarNo ratings yet
- Manual Controller Type-6000Document36 pagesManual Controller Type-6000HameNo ratings yet
- TOE-606-3.1 vs-606 PC3 Instructions (Spec U)Document157 pagesTOE-606-3.1 vs-606 PC3 Instructions (Spec U)JonNo ratings yet
- Electrical & Electronics Engineering FundamentalsDocument2 pagesElectrical & Electronics Engineering FundamentalsVignesh2610No ratings yet
- Design and Construction of An Automated Adjustable-Can Foil Sealing MachineDocument9 pagesDesign and Construction of An Automated Adjustable-Can Foil Sealing Machinepharmafactoryegstore 2021No ratings yet
- Application Systems: Powder DynamometersDocument6 pagesApplication Systems: Powder DynamometersKarthii AjuNo ratings yet
- Magnetic Effect of Electric CurrentDocument9 pagesMagnetic Effect of Electric CurrentAsish ThampiNo ratings yet
- Mech304 MT1Document3 pagesMech304 MT1Muhammed AliNo ratings yet
- CS Lect.2 Modeling in The Frequency DomainDocument60 pagesCS Lect.2 Modeling in The Frequency DomainHassan AliNo ratings yet
- EC368 RoboticsDocument3 pagesEC368 RoboticsBonifus Parambaloth LeenusNo ratings yet
- Lenze GST, GFL, GKR, GKS and GSS Geared Motors GuideDocument477 pagesLenze GST, GFL, GKR, GKS and GSS Geared Motors GuidemacNo ratings yet
- Electrical Actuators: Motors Are GenerallyDocument5 pagesElectrical Actuators: Motors Are GenerallyRutvikNo ratings yet
- Advantages of Using A Single Three Phase Unit Transformer:: Section IDocument74 pagesAdvantages of Using A Single Three Phase Unit Transformer:: Section IHenry KabasaNo ratings yet
- Wear Testing RigDocument6 pagesWear Testing Rigibson045001256No ratings yet
- Permanent Magnet Synchronous MotorDocument9 pagesPermanent Magnet Synchronous MotorHAMID SULIAMANNo ratings yet
- Tht/Hatch: 400º/2H. Boxed Roof Fan With Automated Top CoverDocument8 pagesTht/Hatch: 400º/2H. Boxed Roof Fan With Automated Top CoverJenny ZSNo ratings yet
- Hyperdrive ManualDocument148 pagesHyperdrive ManualJaiprakash SharmaNo ratings yet
- Flowserve Etten-Leur Test CenterDocument8 pagesFlowserve Etten-Leur Test CenterMike PowerNo ratings yet
- UTT Induction Motors Lab ReportDocument14 pagesUTT Induction Motors Lab Reportfaraherh amberNo ratings yet
- Fan Selection HT63JM312-4616Document4 pagesFan Selection HT63JM312-4616glennpanNo ratings yet