You might also like
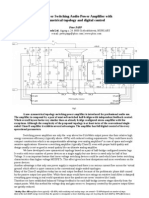
- High Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlDocument3 pagesHigh Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlPéter PAPPNo ratings yet
- 600W PFC Power Supply For Audio AmplifierDocument37 pages600W PFC Power Supply For Audio Amplifierpgamez833No ratings yet
- TDA1514ADocument10 pagesTDA1514AMuammar RiskiNo ratings yet
- British Special Quality Valves and Electron Tube Devices Data Annual 1964–65From EverandBritish Special Quality Valves and Electron Tube Devices Data Annual 1964–65No ratings yet
- Build A Class-A AmplifierDocument9 pagesBuild A Class-A AmplifierFe DnyNo ratings yet
- Audio Product Selection GuideDocument8 pagesAudio Product Selection GuideFritzHartNo ratings yet
- Electrical Overstress (EOS): Devices, Circuits and SystemsFrom EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNo ratings yet
- 120 W X 2 Channel Class D Audio Power Amplifier Using IRS20955 and IRF6645Document43 pages120 W X 2 Channel Class D Audio Power Amplifier Using IRS20955 and IRF6645Domingo ArroyoNo ratings yet
- Servo Stabilizer Manual - 2KVADocument5 pagesServo Stabilizer Manual - 2KVAilesh22100% (1)
- High Efficiency RF and Microwave Solid State Power AmplifiersFrom EverandHigh Efficiency RF and Microwave Solid State Power AmplifiersRating: 1 out of 5 stars1/5 (1)
- First Watt F1 Service ManualDocument14 pagesFirst Watt F1 Service ManualasenmtNo ratings yet
- Transistor Switching and Sequential CircuitsFrom EverandTransistor Switching and Sequential CircuitsRating: 5 out of 5 stars5/5 (1)
- 3X1W Led Driver Solution Using AP3766Document18 pages3X1W Led Driver Solution Using AP3766mvaral_42No ratings yet
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- 70 Watt MOSFET Audio AmplifierDocument5 pages70 Watt MOSFET Audio AmplifierJuan Sánchez LópezNo ratings yet
- Power Supply Design Guidelines v0.4 PDFDocument27 pagesPower Supply Design Guidelines v0.4 PDFdimitaring100% (1)
- Class D Tutorial 606Document51 pagesClass D Tutorial 606luizcpimenta100% (1)
- Mike HarwoodDocument26 pagesMike HarwoodPraveen AndrewNo ratings yet
- External Current Limiting CircuitDocument3 pagesExternal Current Limiting CircuitmikcomiNo ratings yet
- Ga 399 MaDocument9 pagesGa 399 MaEnos Marcos BastosNo ratings yet
- Internal Structure of Op-Amps and Audio Power AmpsDocument8 pagesInternal Structure of Op-Amps and Audio Power AmpsRudrahara100% (1)
- A Class-A Amplifier For Home Constructors: PART ONE - Design Considerations and A Circuit DescriptionDocument7 pagesA Class-A Amplifier For Home Constructors: PART ONE - Design Considerations and A Circuit DescriptionisaijhabinNo ratings yet
- Audio Amplifier 200-500WDocument4 pagesAudio Amplifier 200-500WIndonesiaKan AgungNo ratings yet
- Gainclone CompositeDocument7 pagesGainclone CompositeDragan LalkovicNo ratings yet
- Service Manual: Power AmplifierDocument73 pagesService Manual: Power AmplifierFrancisco Sanabria NajeraNo ratings yet
- B&W 801 vs. CBT36 Ground-Plane Measurements v8.1 PDFDocument36 pagesB&W 801 vs. CBT36 Ground-Plane Measurements v8.1 PDFlucaNo ratings yet
- ESR Tester 096kDocument41 pagesESR Tester 096kFabrício AngieneNo ratings yet
- How To Build An Oscillator Circuit With A 7414 Schmitt Trigger Inverter ChipDocument10 pagesHow To Build An Oscillator Circuit With A 7414 Schmitt Trigger Inverter ChipRene g100% (1)
- ARTA Measurement Box - 7 Steps (With Pictures) - InstructablesDocument9 pagesARTA Measurement Box - 7 Steps (With Pictures) - InstructablesPataco100% (1)
- KLIPSCH Computer Speaker Service ManualDocument21 pagesKLIPSCH Computer Speaker Service ManualEric CreechNo ratings yet
- Felezjoo Pi - Part ListDocument8 pagesFelezjoo Pi - Part ListRani SilvaNo ratings yet
- NV 2002-07 Understanding and Using Norton Op-Amp ICs Parts 1-2Document9 pagesNV 2002-07 Understanding and Using Norton Op-Amp ICs Parts 1-2Dylan KomichekNo ratings yet
- HDCSD9Document68 pagesHDCSD9gabir980% (1)
- RF Agile Transceiver: Data SheetDocument32 pagesRF Agile Transceiver: Data SheetKristen FieldsNo ratings yet
- Led DisplayDocument6 pagesLed DisplayIonut Octavian100% (2)
- Lab Gruppen Ss - 1300Document23 pagesLab Gruppen Ss - 1300Hemendra Menaria100% (1)
- Programming 16 Bit Timer On Atmega328Document9 pagesProgramming 16 Bit Timer On Atmega328VisitOn.T.witte.r100% (1)
- Absolute Sound's Illustrated History of High-End AudioDocument2 pagesAbsolute Sound's Illustrated History of High-End AudioLance Alexander WeidemanNo ratings yet
- 4 Watt Led Driver CircuitDocument17 pages4 Watt Led Driver CircuitNomade VoyageurNo ratings yet
- Wein Bridge Oscillator CircuitDocument3 pagesWein Bridge Oscillator CircuitIndhu k100% (1)
- Iraudamp1 PDFDocument22 pagesIraudamp1 PDFamijoski6051No ratings yet
- Owners Manual: DecwareDocument13 pagesOwners Manual: DecwaretaccituaNo ratings yet
- Constant Current Led DriverDocument27 pagesConstant Current Led DriverSreekanth RaveendranNo ratings yet
- Class-D Power AmplifierDocument30 pagesClass-D Power AmplifierSidney O. EbotNo ratings yet
- Tda 7294Document17 pagesTda 7294Abubakar SidikNo ratings yet
- 50W Hi-Fi Power Audio Amplifier TDA7294 PDFDocument5 pages50W Hi-Fi Power Audio Amplifier TDA7294 PDFciamponi1959100% (1)
- Circuits For Using High Power LED SDocument15 pagesCircuits For Using High Power LED SAsdrubal KakakianNo ratings yet
- 120 W X 2 Channel Class D Audio Power Amplifier Using IRS20955 and IRF6645Document43 pages120 W X 2 Channel Class D Audio Power Amplifier Using IRS20955 and IRF6645Mazariegôs JJNo ratings yet
- RadioShack DX-402 ATS505 20-230 SSB Shortwave Receiver Parts ListDocument3 pagesRadioShack DX-402 ATS505 20-230 SSB Shortwave Receiver Parts ListBenjamin DoverNo ratings yet
- 1 Electrical - and - Electronics - Measurment. McGraw Hill, 2013-413-651Document239 pages1 Electrical - and - Electronics - Measurment. McGraw Hill, 2013-413-651Andrea Acuña100% (1)
- Arduino Timer and InterrupDocument10 pagesArduino Timer and InterrupFabian Monteleone100% (1)
- Delay 1.0K Millis 2.3K Micros 1.0K Delaymicroseconds 359 Analogwrite 274 Tone 1.4K Notone 76 Servo Library 1.6KDocument11 pagesDelay 1.0K Millis 2.3K Micros 1.0K Delaymicroseconds 359 Analogwrite 274 Tone 1.4K Notone 76 Servo Library 1.6KOthmane Bouzarzar100% (1)
- How To Build Your Own Effects Guitar Electronics Schematics PDFDocument9 pagesHow To Build Your Own Effects Guitar Electronics Schematics PDFCheryl ChuckNo ratings yet
- 100watt Audio AmplifierDocument21 pages100watt Audio AmplifierMohd Zamri Bin Mat JusohNo ratings yet
- 30PF994612Document85 pages30PF994612Goran AutolimarNo ratings yet
- What Does MTBF Really Indicate?Document1 pageWhat Does MTBF Really Indicate?senkum812002No ratings yet
- Research Scorecard: December 2015Document46 pagesResearch Scorecard: December 2015senkum812002No ratings yet
- Average Current Mode ControlDocument15 pagesAverage Current Mode Controlsmart2986No ratings yet
- Input Filter Design For SMPSDocument21 pagesInput Filter Design For SMPSsenkum812002No ratings yet
- PFC Feedforward TermDocument5 pagesPFC Feedforward Termsenkum812002No ratings yet
- AB LetterDocument14 pagesAB Lettersenkum812002No ratings yet
- FundPicker Other OptionsDocument2 pagesFundPicker Other Optionssenkum812002No ratings yet
- Boeing 787 and Lithium Ion Battery FailureDocument3 pagesBoeing 787 and Lithium Ion Battery Failuresenkum812002No ratings yet
- FundPicker Other OptionsDocument2 pagesFundPicker Other Optionssenkum812002No ratings yet
- Single-Stage Grid-Tied PV InverterDocument159 pagesSingle-Stage Grid-Tied PV Invertersenkum812002No ratings yet
- EMC Design GuidelinesDocument6 pagesEMC Design Guidelinessenkum812002No ratings yet
- Itr 62 Form 15 GDocument2 pagesItr 62 Form 15 GAccounting & TaxationNo ratings yet
- 24 Op Amps3Document17 pages24 Op Amps3prasad357100% (1)
- Basic Feedback Theory: Integrated CircuitsDocument5 pagesBasic Feedback Theory: Integrated CircuitsSourik BharNo ratings yet
- MGE UPS TopologiesDocument11 pagesMGE UPS Topologiesoadipphone7031No ratings yet
- Inverter Battery Sizing FaqDocument2 pagesInverter Battery Sizing Faqmaven3No ratings yet
- UPS Autonomy CalculationDocument6 pagesUPS Autonomy CalculationRupon RupNo ratings yet
- Voltage FolloweeDocument16 pagesVoltage Followeesenkum812002No ratings yet
- MIT OpenCourseWare Http://Ocw - Mit.eduDocument13 pagesMIT OpenCourseWare Http://Ocw - Mit.edusnehithNo ratings yet
- Battery Backup Calculation For UPS RuntimeDocument1 pageBattery Backup Calculation For UPS Runtimeullaschaudhari100% (2)
- A Guide To Battery ChargingDocument7 pagesA Guide To Battery Chargingsenkum812002No ratings yet
- Analysis of The Sallen-Key ArchitectureDocument18 pagesAnalysis of The Sallen-Key ArchitectureGerardo Amadeus HernándezNo ratings yet
- H2PTodmbhjay1308 Design PowerELab PDFDocument11 pagesH2PTodmbhjay1308 Design PowerELab PDFsenkum812002No ratings yet
- Input EMI Filters For SMPS PDFDocument8 pagesInput EMI Filters For SMPS PDFsenkum812002No ratings yet
- Load Sharing PDFDocument4 pagesLoad Sharing PDFsenkum812002No ratings yet
- AN10273-Power FET Avalanche Ruggedness Rating PDFDocument13 pagesAN10273-Power FET Avalanche Ruggedness Rating PDFsenkum812002No ratings yet
- Snubbers Circuits - HHPDFDocument24 pagesSnubbers Circuits - HHPDFsenkum812002No ratings yet
- ST-Rectifier Selection PDFDocument20 pagesST-Rectifier Selection PDFsenkum812002No ratings yet
- L-11 (GDR) (Et) ( (Ee) Nptel)Document25 pagesL-11 (GDR) (Et) ( (Ee) Nptel)Mohammad Imran KhanNo ratings yet
- C Aj 1609Document2 pagesC Aj 1609vhin84No ratings yet
- Atlas CopcoDM 45 Spare PartsDocument772 pagesAtlas CopcoDM 45 Spare PartsSergey Slomchinskiy0% (1)
- MQ-4C TritonDocument2 pagesMQ-4C TritonLeakSourceInfoNo ratings yet
- High Precision Ball Berings GMNDocument72 pagesHigh Precision Ball Berings GMNSilvio Busdraghi AmorosoNo ratings yet
- VECU - Manual de Producción 70312913Document33 pagesVECU - Manual de Producción 70312913RainorSS100% (2)
- Iam MicroprojectDocument2 pagesIam MicroprojectGabber IsbackNo ratings yet
- Hydrographic Survey: Ecg 305: Chapter 7Document24 pagesHydrographic Survey: Ecg 305: Chapter 7Ahmad ZahirNo ratings yet
- Free Body DiagramDocument8 pagesFree Body Diagramabdullah hamba allahNo ratings yet
- Question .Net CoreDocument8 pagesQuestion .Net CorevdshfsdfhsdvNo ratings yet
- Effects of Stiffness Degradation On DuctilityDocument11 pagesEffects of Stiffness Degradation On DuctilitysalmanNo ratings yet
- Atv71 Controller Inside en v3Document25 pagesAtv71 Controller Inside en v3Juan Rodriguez ArevaloNo ratings yet
- The Centaur Upper Stage Vehicle HistoryDocument12 pagesThe Centaur Upper Stage Vehicle HistoryjuniormirandaNo ratings yet
- Craftsman 82141 User ManualDocument36 pagesCraftsman 82141 User ManualJoe100% (1)
- GP2500S/GP2501S - STN Color: Pro-Face Graphic Operator InterfacesDocument2 pagesGP2500S/GP2501S - STN Color: Pro-Face Graphic Operator Interfacesthanh_cdt01No ratings yet
- IntegratingBIMTechnologyintoLA (2014) PDFDocument115 pagesIntegratingBIMTechnologyintoLA (2014) PDFArnaldo RuizNo ratings yet
- Exxon 6101Document2 pagesExxon 6101M. Kürşad ArslanNo ratings yet
- O&M Manual SPAC-08N-10NDocument46 pagesO&M Manual SPAC-08N-10Nanwar sadat50% (2)
- Google Gender Pay LawsuitDocument31 pagesGoogle Gender Pay LawsuitUSA TODAYNo ratings yet
- PetroMod 1NEWDocument20 pagesPetroMod 1NEWAbdalrhman MuhammadNo ratings yet
- Avx 10k Data Sheet Data Sheets enDocument6 pagesAvx 10k Data Sheet Data Sheets enAerotia InternationalNo ratings yet
- Melde's MethodDocument2 pagesMelde's MethodDR.P.V.Kanaka Rao0% (1)
- Qinhuangdao Red Ribbon ParkDocument18 pagesQinhuangdao Red Ribbon Parkjaya saputraNo ratings yet
- Bicmos InvertersDocument10 pagesBicmos InvertersLily SharmaNo ratings yet
- Lab-Java Programming Intro IDocument83 pagesLab-Java Programming Intro IHeavenlyPlanetEarth80% (5)
- Fire ProtectionDocument44 pagesFire ProtectionAbdul JabbarNo ratings yet
- New Concept in AC Power TheoryDocument8 pagesNew Concept in AC Power TheoryGabor PeterNo ratings yet
- Delphi Heavy Duty Emissions Brochure 2011 2012Document100 pagesDelphi Heavy Duty Emissions Brochure 2011 2012Younwoo NamNo ratings yet
- LinuxDocument206 pagesLinuxDinesh BhawnaniNo ratings yet
- Difference Between Forging and CastingDocument2 pagesDifference Between Forging and CastingMOHAMMAD ALINo ratings yet
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Industrial Waste Treatment HandbookFrom EverandIndustrial Waste Treatment HandbookRating: 5 out of 5 stars5/5 (1)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsFrom EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsRating: 4.5 out of 5 stars4.5/5 (2)