You might also like
- Libro Basta de Historias de Andres OppenheimerDocument21 pagesLibro Basta de Historias de Andres OppenheimerFreddy Subero100% (12)
- Proyecto Final Contabilidad y Administración FinancieraDocument13 pagesProyecto Final Contabilidad y Administración FinancieraDiana Garrido75% (4)
- Examen01 Control NLDocument2 pagesExamen01 Control NLDiego Ivan LeonNo ratings yet
- Proyecto CarroceriasDocument41 pagesProyecto CarroceriasDiego Ivan LeonNo ratings yet
- Práctica 6Document9 pagesPráctica 6Diego Ivan LeonNo ratings yet
- Proyecto LargeroDocument8 pagesProyecto LargeroDiego Ivan LeonNo ratings yet
- Electricidad BasicaDocument128 pagesElectricidad BasicaDiego Ivan LeonNo ratings yet
- Ups CT002365Document1,354 pagesUps CT002365Diego Ivan Leon100% (1)
- 03-Introducción Dinámica Fluidos IDocument37 pages03-Introducción Dinámica Fluidos IDiego Ivan LeonNo ratings yet
- CARROCERIADocument25 pagesCARROCERIACarlos Andrés Yépez Salgado80% (5)
- Ejercicios de Cilindrada y Relacion CompresionDocument7 pagesEjercicios de Cilindrada y Relacion CompresionDiego Ivan Leon100% (1)
- 03-Introducción Dinámica Fluidos IDocument37 pages03-Introducción Dinámica Fluidos IDiego Ivan LeonNo ratings yet
- Geometria Del MCI 2Document9 pagesGeometria Del MCI 2Diego Ivan LeonNo ratings yet
- TEMA1. Int. A La Formulación y Evaluación de ProyectosDocument17 pagesTEMA1. Int. A La Formulación y Evaluación de ProyectosDiego Ivan LeonNo ratings yet
- Cálculos EjesDocument18 pagesCálculos EjesDiego Ivan LeonNo ratings yet
- CobreDocument3 pagesCobreDiego Ivan LeonNo ratings yet
- Agua BlancaDocument87 pagesAgua BlancaCarlos TomeyNo ratings yet
- Leyes de Metrología e Instituciones Que Certifican Patrones de Medición en MéxicoDocument1 pageLeyes de Metrología e Instituciones Que Certifican Patrones de Medición en MéxicoVictor Hugo Guzmán BaltazarNo ratings yet
- Pia 2 Masc PDFDocument6 pagesPia 2 Masc PDFaida torresNo ratings yet
- Ensayo - El Impacto de Las TIC en La EconomíaDocument2 pagesEnsayo - El Impacto de Las TIC en La EconomíaAbrahamIsaacDurán67% (3)
- Corona de Giro 20: ProcedimientoDocument2 pagesCorona de Giro 20: ProcedimientoJhousep steven Mesia gonzalesNo ratings yet
- Cordillera Oriental y Sierras SubandinasDocument3 pagesCordillera Oriental y Sierras SubandinasLeoNo ratings yet
- El Desarrollo de Enfermeria en AmericalatinaDocument13 pagesEl Desarrollo de Enfermeria en AmericalatinaGla DoradoNo ratings yet
- Proyecto Mi Universo en MiDocument3 pagesProyecto Mi Universo en MiKeila LeguizamónNo ratings yet
- Analisisriesgosfactoresriesgo02 PDFDocument21 pagesAnalisisriesgosfactoresriesgo02 PDFSaraMorales19No ratings yet
- Historia de La GeometríaDocument2 pagesHistoria de La GeometríaAmin Abi-rachedNo ratings yet
- Analisis Cvu Control Costos y PresupuestoDocument35 pagesAnalisis Cvu Control Costos y PresupuestoDiego G. Parra T.0% (1)
- Planilla Electrónica para El Cálculo de Redes de Alcantarillado Sanitario Recomendaciones para El Uso de La Planilla ElectrónicaDocument7 pagesPlanilla Electrónica para El Cálculo de Redes de Alcantarillado Sanitario Recomendaciones para El Uso de La Planilla ElectrónicaRommel Casavilca QuispeNo ratings yet
- Procedimiento de Izaje POC-PREV-006Document21 pagesProcedimiento de Izaje POC-PREV-006Silvanna Paola Garcia GadoyNo ratings yet
- Reporte Practica 4Document10 pagesReporte Practica 4Alfredo Rueda Espinosa0% (1)
- Investigación Cualitativa - La ComplementariedadDocument236 pagesInvestigación Cualitativa - La ComplementariedadHernán Cortés100% (4)
- Adminpujojs, Reseñas de Trabajos de GradoDocument9 pagesAdminpujojs, Reseñas de Trabajos de GradoAndrés AristizabalNo ratings yet
- CTA - U6 - 1er Grado - Sesion 05Document7 pagesCTA - U6 - 1er Grado - Sesion 05yamiliNo ratings yet
- Base de Datos EpccDocument22 pagesBase de Datos EpccLore PeñaNo ratings yet
- Políticas y Producción Audiovisual en La Era Digital en América LatinaDocument233 pagesPolíticas y Producción Audiovisual en La Era Digital en América LatinaJoaoricardoatmNo ratings yet
- documentos-Primaria-Sesiones-Matematica-SextoGrado-SEXTO GRADO U1 MATE Unidad Didactica PDFDocument7 pagesdocumentos-Primaria-Sesiones-Matematica-SextoGrado-SEXTO GRADO U1 MATE Unidad Didactica PDFMaría Luisa Barreto PalaciosNo ratings yet
- Pa2. Auditoria GubernamentalDocument8 pagesPa2. Auditoria GubernamentalEsteili Duran MendozaNo ratings yet
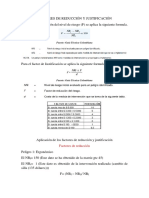
- Factores de Reducción y JustificaciónDocument4 pagesFactores de Reducción y JustificaciónAlan Recalde100% (2)
- Tecnica SDocument16 pagesTecnica SXumire BuguñaNo ratings yet
- Ensayo Sobre El Medio Ambiente y La ContaminaciónDocument9 pagesEnsayo Sobre El Medio Ambiente y La ContaminaciónRobert Soberón EspinozaNo ratings yet
- Alcantarillados en BoliviaDocument6 pagesAlcantarillados en BoliviaYerko Castillo Morales50% (4)
- Ambiente Educativo y Estetica SocialDocument3 pagesAmbiente Educativo y Estetica Socialllph10100% (1)
- P11 Interruptor HorarioDocument1 pageP11 Interruptor HorarioJM CuevasNo ratings yet
- Matriz Topos LogoiDocument1 pageMatriz Topos LogoiDavid JonesNo ratings yet
- El Cuerpo FragmentadoDocument17 pagesEl Cuerpo FragmentadoEstel ValawingNo ratings yet