Professional Documents
Culture Documents
Sistemas de Control II (M)
Uploaded by
Alex GuevaraCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Sistemas de Control II (M)
Uploaded by
Alex GuevaraCopyright:
Available Formats
SISTEMAS DE CONTROL II
Grupo de Investigaci on en Control Industrial-GICI
Area de Autom atica
Profesores:
Jos e Miguel Ramrez S.
Esteban Emilio Rosero Garca
UNIVERSIDAD DEL VALLE
Escuela de Ingeniera El ectrica y Electronica
Santiago de Cali
2007
Contenido
1. Estabilidad de sistemas din amicos 11
1.1. Deniciones de Estabilidad . . . . . . . . . . . . . . . . . . . . . 12
1.1.1. Estabilidad de Entrada Limitada-Salida Acotada . . . . . 12
1.1.2. Estabilidad Interna . . . . . . . . . . . . . . . . . . . . . 13
1.2. Criterio de Routh-Hurwitz . . . . . . . . . . . . . . . . . . . . . 16
1.3. Estabilidad para Sistemas en Tiempo Discreto . . . . . . . . . . . 19
1.3.1. Prueba de Estabilidad de Jury . . . . . . . . . . . . . . . 19
1.3.2. Estabilidad absoluta de Sistemas Discretos con Routh . . . 23
2. An alisis mediante el lugar geom etrico de las races 28
2.1. Lugar Geom etrico de las Races en tiempo continuo . . . . . . . . 29
2.1.1. Variaci on de Polos de Red Cerrada . . . . . . . . . . . . . 29
2.1.2. Criterios de Magnitud y
Angulo . . . . . . . . . . . . . . 29
2.1.3. Reglas de Construcci on . . . . . . . . . . . . . . . . . . . 31
2.1.4. Contorno de las races . . . . . . . . . . . . . . . . . . . 36
2.1.5. Efectos de adicionar Polos y Ceros al Lugar . . . . . . . . 40
2.2. LGDR Para Sistemas de Tiempo Discreto . . . . . . . . . . . . . 42
3. An alisis mediante la respuesta en frecuencia 50
3.1. Respuesta en Frecuencia en tiempo continuo . . . . . . . . . . . . 51
3.1.1. Gr acas de Respuesta en Frecuencia . . . . . . . . . . . . 51
3.1.2. Caractersticas de Funcionamiento en Frecuencia . . . . . 52
3.1.3. Correlaci on Tiempo-Frecuencia . . . . . . . . . . . . . . 55
3.1.4. Especicaciones de Funcionamiento . . . . . . . . . . . . 57
3.1.5. Diagramas de Bode en T erminos Simples . . . . . . . . . 58
3.1.6. Respuesta en Red Cerrada . . . . . . . . . . . . . . . . . 65
3.2. Criterio de Estabilidad de Nyquist . . . . . . . . . . . . . . . . . 67
3.3. Respuesta de Frecuencia de Sistemas Discretos . . . . . . . . . . 72
2
3.4. Estabilidad en Respuesta de Frecuencia Para Sistemas Discretos . 73
3.4.1. M argenes de Estabilidad . . . . . . . . . . . . . . . . . . 74
3.4.2. La transformada Bilineal o transformada W . . . . . . . . 76
4. Dise no de sistemas de control 85
4.1. Dise no de Sistemas de Control . . . . . . . . . . . . . . . . . . . 86
4.1.1. M etodos de Dise no del Controlador . . . . . . . . . . . . 88
4.1.2. Arquitectura del Control . . . . . . . . . . . . . . . . . . 89
4.1.3. Reglas para el Dise no . . . . . . . . . . . . . . . . . . . . 92
4.1.4. Restricciones para el Diseno . . . . . . . . . . . . . . . . 93
4.2. Dise no de Sistemas de Control An alogos . . . . . . . . . . . . . . 95
4.2.1. Dise no con el Controlador PD . . . . . . . . . . . . . . . 95
4.2.2. Dise no con el Controlador I . . . . . . . . . . . . . . . . 102
4.2.3. Dise no con el Controlador PI . . . . . . . . . . . . . . . . 103
4.2.4. Dise no con el Controlador PID . . . . . . . . . . . . . . . 109
4.2.5. Dise no para Plantas Sobreamortiguadas de Alto Orden . . 114
4.2.6. Compensaci on Paralela . . . . . . . . . . . . . . . . . . . 115
4.2.7. Compensaci on Cascada . . . . . . . . . . . . . . . . . . 118
4.2.8. Compensaci on Directa . . . . . . . . . . . . . . . . . . . 123
4.3. Dise no de Sistemas de Control Digitales . . . . . . . . . . . . . . 128
4.3.1. Dise no por Equivalente Discreto . . . . . . . . . . . . . . 128
4.3.2. Dise no con el Lugar de las Races . . . . . . . . . . . . . 137
4.3.3. Dise no por Respuesta de Frecuencia . . . . . . . . . . . . 140
4.3.4. El Controlador RST . . . . . . . . . . . . . . . . . . . . 142
4.4. Dise no por Asignaci on de Polos (Sntesis) . . . . . . . . . . . . . 147
4.4.1. Controlador PID . . . . . . . . . . . . . . . . . . . . . . 147
4.4.2. Controlador RST . . . . . . . . . . . . . . . . . . . . . . 160
5. Dise no en el Espacio de Estado de Sistemas de Control Digitales 175
5.1. Dise no de la Ley de Control . . . . . . . . . . . . . . . . . . . . 176
5.1.1. Dise no de K a partir de la Forma Canonica Controlable . 179
5.1.2. Dise no de K Mediante la F ormula de Ackermann . . . . . 187
5.2. Dise no del Observador . . . . . . . . . . . . . . . . . . . . . . . 188
5.2.1. Observador de Prediccion . . . . . . . . . . . . . . . . . 188
5.2.2. Observabilidad del Estado . . . . . . . . . . . . . . . . . 190
5.2.3. Controlabilidad y Observabilidad para Sistemas Continuos 194
5.2.4. Efecto de la discretizacion sobre la Observabilidady Con-
trolabilidad . . . . . . . . . . . . . . . . . . . . . . . . . 194
5.2.5. C alculo de la Matriz de Realimentacion del Observador K
o
195
5.2.6. Observador Corriente . . . . . . . . . . . . . . . . . . . . 199
5.2.7. Observador de Orden Reducido . . . . . . . . . . . . . . 200
5.2.8. Efecto del Observador en el Lazo Cerrado . . . . . . . . . 203
5.3. Dise no de Servosistemas . . . . . . . . . . . . . . . . . . . . . . 204
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
J. Ramrez y E. Rosero 4 GICI
Curso: Sistemas de Control II
Introducci on
A continuaci on se realiza una descripcion del curso:
C odigo: 710018
Cr editos: 4
Programa: MAESTRIAENINGENIER
IA
ENFASIS ENAUTOM
ATICA (7710),
ESPECIALIZACI
ON EN AUTOMATIZACI
ON INDUSTRIAL(5778)
Intensidad Horaria: 3 Horas Semanales Teora, 1 Hora semanal Pr actica
Pre-requisitos: Sistemas de Control I
Perodo: Febrero-Junio de 2007
Profesor: Jos e Miguel Ramrez S. (jomiram@univalle.edu.co), Esteban Emilio
Rosero Garca (emilros@univalle.edu.co)
Observaciones: No es habilitable, Si es validable
En a nos recientes, los sistemas de control han asumido un papel cada vez
m as importante en el desarrollo y avance de la tecnologa y el desarrollo de la
humanidad. Los sistemas de control se encuentran en todos los sectores de la
industria, e inclusive en cada una de las actividades diarias que realizamos.
Para alcanzar desempeno optimo, productividad maxima, benecio maximo,
costo mnimo o la utilizacion mnima de energa de un proceso, se requiere contro-
lar los sistemas din amicos de una manera adecuada, para ello se requiere analizar
y dise nar controladores con altas exigencias de desempeno.
En este curso se presenta el analisis y dise no de sistemas de control lineales
en tiempo continuo y discreto.
5
Mapa conceptual
Figura 1: Mapa conceptual de Sistemas de control II
Objetivos
Al nalizar este curso Uusted estara en capacidad de:
General: Analizar y dise nar sistemas de control lineales analogos y discretos,
con representaci on de entrada salida o de estado.
Especcos
Utilizar las t ecnicas de an alisis de lugar de las races y respuesta de frecuen-
cia para el analisis de sistemas de control.
Analizar las propiedades de estabilidad, controlabilidad y observabilidad de
un sistema din amico.
J. Ramrez y E. Rosero 6 GICI
Analizar las diferentes representaciones de un sistema dinamico, obtenidas
mediante transformaciones lineales.
Ajustar los par ametros de una ley de control utilizando, los metodos del
lugar geom etrico de las races, respuesta de frecuencia y diseno analtico.
Dise nar la ley de control y el observador de estado apropiado para un sis-
tema descrito en el espacio de estado.
Determinar la estabilidad de los sistemas automaticos de control estudiados.
Orientaciones para el estudio
Los temas se desarrollaran mediante lecturas del estudiante, foros, ejercicios
propuestos a desarrollar por los estudiantes, trabajo en el computador y trabajo en
un proyecto en el cual se aplicaran los conocimientos adquiridos a la pr actica.
La evaluaci on ser a:
Evaluaciones parciales: (4 evaluaciones) 80 %
Proyectos: 20 %
En cada unidad proponemos ejercicios y evaluaciones realizadas en anos an-
teriores, con el objeto que usted los desarrolle como parte de su preparacion y
no se debe entregar ning un informe al profesor. Las evaluaciones se realizaran al
nalizar las unidades como se planearon en la presentacion de las unidades. Adi-
cionalmente habra 4 proyectos a desarrollar por usted, que deben ser entregados
oportunamente al profesor del curso.
Presentaci on de las unidades
A continuaci on se describe el contenido de cada una de las unidades del curso:
Unidad 1: Estabilidad de sistemas din amicos[1]
J. Ramrez y E. Rosero 7 GICI
Conceptualizacion, criterios de Routh-Hurwitz y de Jury, criterio de
Routh para sistemas discretos.
Unidad 2: An alisis mediante el lugar geom etrico de las races[1,5]
Tiempo continuo: variacion de polos en red cerrada, criterios de mag-
nitud y angulo, reglas de construccion, contorno de las races, efectos
de adicionar polos y ceros al lugar.
Lugar para sistemas de tiempo discreto.
Evaluaci on: Parcial 1
Unidad 3: An alisis de estabilidad mediante las t ecnicas de respuesta de frecuen-
cia[1,5]
Tiempo continuo: gr acas de respuesta de frecuencia, caractersticas
de funcionamiento en frecuencia, correlacion tiempo-frecuencia, es-
pecicaciones de funcionamiento, diagramas de Bode, respuesta de
frecuencia en red cerrada, analisis de estabilidad con el criterio de
Nyquist.
Respuesta de frecuencia de sistemas discretos.
Evaluaci on: Parcial 2
Unidad 4: Dise no de sistemas de control
M etodos de dise no, estructuras de control, procedimiento[1,10,14] .
Sistemas de control analogos: ajuste de controladores P, PD, I, PI, PID,
para plantas de bajo orden; ajuste para plantas de alto orden. Compen-
saci on paralela, cascada y directa[10,12].
Sistemas de control digitales: diseno por equivalente discreto, lugar
de las races y respuesta de frecuencia; diseno de controladores PID y
RST por asignaci on de polos[2,6,9,10,11].
Evaluaci on: Parcial 3
Unidad 5: Dise no en espacio de estado de sistemas de control digitales[1,2,6]
Dise no de la ley de control: va la forma can onica controlable, contro-
labilidad de estado y de salida, diseno por Ackermann.
J. Ramrez y E. Rosero 8 GICI
Dise no del observador: observador de prediccion, observabilidad, ob-
servadores corriente y de orden reducido, efecto del observador en el
lazo cerrado.
Dise no de servosistemas.
Evaluaci on: Parcial 4
Glosario
Bibliografa
1. TEXTO GUIA: KUO BENJAMIN, Sistemas de Control Autom atico,
P.H.H., 1997.
2. KUO BENJAMIN, Sistemas de Control Digital, CECSA, P.H.H., 1997.
3. W. BOLTON, Ingeniera de Control, Alfaomega, 2a. Edicion, 2001.
4. ERONINI-UMEZ-ERONINI, Din amica de Sistemas y Control, Thompson
Learning, 2001.
5. OGATA KATSUSHITO, Ingeniera de Control Moderno, P.H.H., 3 edici on,
1998.
6. OGATA KATSUSHITO, Sistemas de Control en Tiempo Discreto. P.H.H,
M ex. 1996.
7. PAUL H. LEWIS-CHANGYANG, Sistemas de Control en Ingeniera, P.H.H.,
Madrid 1999
J. Ramrez y E. Rosero 9 GICI
8. DORF RICHARD, Sistemas Modernos de Control, Addison-Wesley Iberoamer-
icana, 2da edici on en espa nol, 1989.
9. GENEF. FRANKLIN, Control de Sistemas Din amicos con retroalimentacion,
Addison-Wesley Iberoamericana, 1991.
10. KARL J. ASTROM-BJORN WITTENMARK, Computer-Controlled Sys-
tems, Pentice Hall Information and Systems Sciences Series. 3ra Edicion.
11. SCHULTZ D. and MELSA J., State functions and linear control systems,
Mac Graw-Hill Book Company. 1967.
12. SIGURD SKOGESTAD and IAN POSTLETHWAITE, Multivariable Feed-
back Control, Jhon Wiley & Sons Ltd, 1996.
J. Ramrez y E. Rosero 10 GICI
Captulo 1
Estabilidad de sistemas din amicos
Introducci on
Entre los muchos tipos de especicaciones de desempeno utilizadas para el
dise no de un sistema de control, el requerimiento mas importante es que el sis-
tema sea estable; por lo general, un sistema inestable se considera inutil. Existen
muchas nociones de estabilidad, una de ellas es considerar que un sistema es es-
table si al aplicarle una entrada de magnitud nita, entonces la salida es tambien
nita.
Esta unidad trata las condiciones que se deben satisfacer para que los sistemas
lineales invariantes de una entrada y una salida, sean estables. Para estos sistemas,
el requerimiento de establilidad se puede denir en terminos de los polos de la
funci on de transferencia en lazo cerrado.
Objetivo:
Determinar la estabilidad de los sistemas automaticos de control estudiados.
(Objetivo de evaluaci on)
11
1.1. DEFINICIONES DE ESTABILIDAD
Contenidos
1.1. Deniciones de Estabilidad
1.1.1. Estabilidad de Entrada Limitada-Salida Acotada
Se dice que un sistema lineal, invariante y monovariable, es estable de Entra-
da Limitada-Salida Acotada ELSA (en ingles BIBO, Bounded Input - Bounded
Output), si toda entrada acotada produce una salida acotada. Esta propiedad esta
muy asociada con la respuesta al impulso g(t) o g(k) del sistema; consideremos
el sistema de tiempo continuo descrito por su funcion de transferencia:
R(s) G(s) C(s)
La condici on de estabilidad ELSA exige que si [r(t)[ N < para t 0,
entonces [c(t)[ M < para t 0.
A partir de la respuesta calculada va la integral de convolucion:
[c(t)[
_
0
[r(t )[[g()[d N
_
0
[g()[d M
se requiere que el area de la curva debajo de [g()[ debe ser nita; note que es
necesario que lm
t
g(t) 0, para que el sistema continuo sea ELSA estable.
Para los sistemas lineales invariantes monovariables de tiempo discreto, la
denici on de estabilidad ELSA es la misma; un analisis similar lleva a que se
debe cumplir la condicion:
0
[g(k)[ <
lo cual exige que lm
k
g(k) 0, para que el sistema discreto sea ELSA estable.
Las condiciones anteriores en g(t) o g(k) permiten relacionar la estabilidad
ELSA con la ubicaci on de las races en los planos s o z respectivamente.
1. Plano s: Polo(s) en el semiplano izquierdo, g(t) es acotada y decrece asintotica-
mente lm
t
g(t) 0; esto garantiza que
_
0
[g()[d sea acotada, luego el
sistema es ESTABLE.
J. Ramrez y E. Rosero 12 GICI
1.1. DEFINICIONES DE ESTABILIDAD
Plano z: Polo(s) dentro del crculo unitario, g(k) es acotada y decrece asintotica-
mente lm
k
g(k) 0; esto garantiza que
0
[g(k)[ sea acotada, luego el
sistema es ESTABLE.
2. Plano s: Polo(s) en el semiplano derecho lm
t
g(t) , luego el sistema
no es estable ELSA; un sistema que no es estable ELSA, se dene como
INESTABLE.
Plano z: Polo(s) fuera del crculo unitario lm
k
g(k) , luego el sistema
es INESTABLE.
3. Plano s: Si hay un polo en el origen o complejos no repetidos en el eje
imaginario, [g(t)[ es constante o una sinusoide no amortiguada y asintotica-
mente no tiende al innito; sin embargo, la integral de g(t) no es acotada y
el sistema es ELSA INESTABLE.
Plano z: Un polo simple en z = 1, tiene una secuencia de respuesta al pul-
so unitario constante; pares de polos complejos no repetidos en el crculo
imaginario o un polo simple en z = 1 tienen respuestas oscilatorias aco-
tadas. Sin embargo, la sumatoria de [g(k)[ no es acotada y el sistema es
ELSA INESTABLE.
Por razones pr acticas, cuando las races de la ecuacion caracterstica est an
en el eje complejo jw o en el crculo de radio unidad del plano z, se dice que
el sistema es MARGINALMENTE ESTABLE o INESTABLE. Recorde-
mos que la acci on integral adiciona polos en s = 0 o z = 1 y en principio
es inestable, sin embargo, sabemos que es muy util.
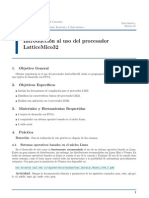
1.1.2. Estabilidad Interna
Consideremos a un sistema de control realimentado unitario con funciones
de transferencia G
1
(s) para el controlador y G
2
(s) para la planta, con entradas
de referencia r(t), perturbaciones a la entrada y salida de la planta d
1
(t), d
2
(t) y
ruido en la medida n(t) y con salidas de interes c(t) y la se nal de control a(t).
Para este sistema podemos denir funciones de transferencia entre cada sali-
da y cada entrada, ocho en total. Decimos que el sistema de control es INTER-
NAMENTE ESTABLE, si las ocho funciones de transferencia son estables. Esto
equivale a exigir que todas las senales en el lazo sean acotadas para cada conjunto
J. Ramrez y E. Rosero 13 GICI
1.1. DEFINICIONES DE ESTABILIDAD
r(t)
a(t) +
+
d
2
(t)
+
n(t)
c(t)
G
2
(s)
G
1
(s)
+
d
1
(t)
+ +
+
Figura 1.1: Sistema de control realimentado.
de entradas r(t), d
1
(t), d
2
(t) y n(t) acotadas.
La estabilidad interna se puede asociar tambien a las races de la ecuacion
caraterstica. Consideremos G
1
(s) = N
1
(s)/D
1
(s) y G
2
(s) = N
2
(s)/D
2
(s). Se
puede probar que el sistema realimentado es internamente estable, si y solo si las
races de la ecuacion caracterstica:
D
1
(s)D
2
(s) +N
1
(s)N
2
(s) = 0
tienen parte real negativa.
La noci on de estabilidad interna es mas fuerte que la de estabilidad ELSA de
la referencia a la salida; ella exige adicionalmente que no hayan cancelaciones de
polos inestables entre la planta G
2
(s) y el controlador G
1
(s).
Ejemplo
Consideremos: G
1
(s) =
(s+1)
s
y G
2
(s) =
1
(s+1)(s+1)
La funci on de transferencia entre la salida C(s) y la entrada de referencia
R(s):
T(s) =
C(s)
R(s)
=
1
s
2
+s + 1
es estable. Sin embargo, la funcion de transferencia entre la salida C(s) y la en-
J. Ramrez y E. Rosero 14 GICI
1.1. DEFINICIONES DE ESTABILIDAD
trada de perturbacion D
1
(s):
S
cd
(s) =
C(s)
D
1
(s)
=
s
(s + 1)(s
2
+s + 1)
es inestable; el lazo cerrado no es internamente estable, ya que D
1
(s)D
2
(s) +
N
1
(s)N
2
(s) = (s + 1)(s
2
+s + 1) tiene una raz inestable.
De lo anterior, tenemos que el problema de determinar la estabilidad ELSA o
interna de un sistema, se reduce a poder saber si el polinomio caracterstico:
p(s) = s
n
+a
n1
s
n1
+... +a
1
s +a
0
,
con coecientes a
i
reales, tiene todas sus races con parte real negativa, esto es, si
es Hurwitz. Por supuesto que para ello podramos simplemente calcular las races
del polinomio. Sin embargo, en muchos casos es util estudiar la relacion entre
la posici on de las races y ciertos coecientes del polinomio. Veamos algunas
propiedades polinomiales de interes para ello:
1. El coeciente a
n1
satisface:
a
n1
=
n
i=1
i
donde los
1
,
2
...
n
son las races de P(s)
2. El coeciente a
0
satisface:
a
0
= (1)
n
n
i=1
i
3. Si todas las races de p(s) tienen parte real negativa, entonces necesaria-
mente a
i
> 0, i 0, 1, ...(n 1).
4. Si cualquiera de los coecientes del polinomio es no positivo (negativo o
cero), entonces al menos una de las races tiene parte real no negativa.
J. Ramrez y E. Rosero 15 GICI
1.2. CRITERIO DE ROUTH-HURWITZ
1.2. Criterio de Routh-Hurwitz
En estabilidad se estudian 2 aspectos de interes para an alisis y dise no:
* Estabilidad absoluta: Investiga si un sistema de control es estable.
* Estabilidad relativa: Investiga el grado de estabilidad de un sistema estable.
El criterio de Routh-Hurwitz es un algoritmo de aplicacion directa para evaluar
la estabilidad absoluta de un sistema analogo determinando el n umero de polos
de lazo cerrado que caen en el semiplano derecho, sin calcular las races de la
ecuaci on caracterstica. Tambi en indica el n umero de races que est an sobre el eje
imaginario jw; es uno de los m etodos m as usados para determinar si un polinomio
es Hurwitz o no, bas andose en sus coecientes. Es util sobre todo para polinomios
de grado elevado.
J. Ramrez y E. Rosero 16 GICI
1.2. CRITERIO DE ROUTH-HURWITZ
El m etodo es el siguiente:
1. Ordenar la ecuacion caracterstica de la forma:
a
0
s
n
+a
1
s
n1
+ +a
n1
s +a
n
= 0; a
n
,= 0
2. Vericar que todos los coecientes de la ecuacion tienen el mismo signo
y ninguno de los coecientes es igual a cero (condicion necesaria pero no
suciente); de lo contrario, existe al menos una raz que es imaginaria o
tiene parte real positiva y el polinomio no es Hurwitz.
3. Elaborar la tabla.
s
n
a
0
a
2
a
4
. . .
s
n1
a
1
a
3
a
5
. . .
s
n2
b
1
b
2
b
3
. . .
s
n3
c
1
c
2
c
3
. . .
. . . . . . .
. . . . . . .
. . . . . . .
s
1
d
1
. . . . .
s
0
f
1
. . . . .
b
1
=
a
1
a
2
a
0
a
3
a
1
, b
2
=
a
1
a
4
a
0
a
5
a
1
, b
3
=
a
1
a
6
a
0
a
7
a
1
, ...
c
1
=
b
1
a
3
a
1
b
2
b
1
, c
2
=
b
1
a
5
a
1
b
3
b
1
, ...
etc...hasta la la enesima.
El arreglo anterior se conoce como tabulaci on de Routh o arreglo de Routh. La
columna de eses en el lado izquierdo se utiliza para prop ositos de identicacion.
La columna de referencia mantiene el rastro de los calculos, y el ultimo renglon
de la tabulacion de Routh debe ser siempre el renglon de S
0
.
Una vez que la tabulacion de Routh se ha completado, el ultimo paso es aplicar el
criterio, el cual establese que: El n umero de cambios de signos en los elementos
de la primera columna es igual al n umero de las races con partes reales positivas
o en el semiplano derecho del plano s.
Por tanto, un polinomio sera Hurwitz si tiene todos sus coecentes y elementos
de la primera columna de la tabulacion de Routh, positivos.
J. Ramrez y E. Rosero 17 GICI
1.2. CRITERIO DE ROUTH-HURWITZ
Se diculta aplicar el criterio cuando:
1. El primer elemento de una la es cero, tendiendo a innito los elementos de
la la siguiente.
En este caso, se reemplazael elementonulo por un numero positivo peque no
.
2. Los elementos de una la son nulos; esto es debido a:
Pares de races reales equidistantes del eje imaginario.
Pares de races complejas, simetricas al origen.
En este caso se puede crear la Ecuaci on Auxiliar, con los coecientes de la la
superior a la la nula; esta ecuacion es de orden par y sus races son tambi en de la
ecuaci on caracterstica. Para este caso, se reemplaza la la nula con los coeentes
de la ecuaci on auxiliar.
Ejemplo
Sistema de Control de la excitacion con excitatriz y acccion I.
G(s) =
k
I
s(
E
s + 1)(
G
s + 1)
E
,
G
> 0
Soluci on:
Ecuaci on caracterstica:
G
s
3
+ (
E
+
G
)s
2
+s +k
I
= 0
s
3
G
1
s
2
E
+
G
k
I
s
1
1
EQ
k
I
0
s
0
k
I
Donde:
EQ
=
E
E
+
G
El sistema es estable si:
1
EQ
k
I
> 0 y k
I
> 0
J. Ramrez y E. Rosero 18 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
0 < k
I
<
1
EQ
=
E
+
G
G
Por otro lado, si k
I
=
E
+
G
G
, la la s es nula y hay races conjugadas en el eje
complejo; la Ecuacion Auxiliar es:
(
E
+
G
)s
2
+
E
+
G
G
= 0
s
2
=
1
G
s
12
= j
_
1
G
_
1
G
: frecuencia de oscilacion.
Dividiendo la ecuacion caracterstica por la ecuacion auxiliarse obtiene la tercera
raz en:
s
3
=
1
EQ
1.3. Estabilidad para Sistemas en Tiempo Discreto
1.3.1. Prueba de Estabilidad de Jury
Permite evaluar la estabilidad absoluta de sistemas discretos , directamente de
la ecuaci on caracterstica.
Se debe escribir la ecuacion caracterstica en la forma:
P(z) = a
0
z
n
+a
1
z
n1
+ +a
n1
z +a
n
, a
0
> a
n
El sistema es estable si cumple todas las siguientes condiciones:
1. [a
n
[ < a
0
2. P(z)[
z=1
> 0
3. P(z)[
z=1
=
_
> 0 Si n es par
< 0 Si n es impar
J. Ramrez y E. Rosero 19 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
4.
[b
n1
[ > [b
0
[
[c
n2
[ > [c
0
[
.
.
.
[q
2
[ > [q
0
[
Donde los coecientes b
k
, c
k
, ..., q
k
de la ultima condicion, se calculan a partir
de la siguiente tabla.
z
0
z
1
z
2
z
3
. . . z
n2
z
n1
z
n
1 a
n
a
n1
a
n2
a
n3
. . . a
2
a
1
a
0
2 a
0
a
1
a
2
a
3
. . . a
n2
a
n1
a
n
3 b
n1
b
n2
b
n3
b
n4
. . . b
1
b
0
4 b
0
b
1
b
2
b
3
. . . b
n2
b
n1
5 c
n2
c
n3
c
n4
c
n5
. . . c
0
6 c
0
c
1
c
2
c
3
. . . c
n2
. . . . .
. . . . .
. . . . .
2n 5 p
3
p
2
p
1
p
0
2n 4 p
0
p
1
p
2
p
3
2n 3 q
2
q
1
q
0
Con:
b
k
= det
_
a
n
a
n1k
a
0
a
k+1
_
k = 0, 1, 2, ..., n 1
c
k
= det
_
b
n1
b
n2k
b
0
b
k+1
_
k = 0, 1, 2, ..., n 2
.
.
.
q
k
= det
_
p
3
p
2k
p
0
p
k+1
_
k = 0, 1, 2
J. Ramrez y E. Rosero 20 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
Note que la ultima la tiene 3 elementos, con excepcion de los sistemas de se-
gundo orden para los cuales habra 2n 3 = 1, un elemento; observe que los
elementos de una la par son los de la la impar superior, en sentido inverso.
Ejemplo
Evaluar la estabilidad del sistema con ecuacion caracterstica:
P(z) = z
4
1,2z
3
+ 0,07z
2
+ 0,3z 0,08 = 0
Soluci on:
a
0
= 1, a
1
= 1,2, a
2
= 0,07, a
3
= 0,3, a
4
= 0,08
1. [a
n
[ < a
0
: [ 0,08[ < 1 Cumple
2. P(1) = 0,09 > 0 Cumple
3. P(1) = 1,89 > 0 Cumple
4.
z
0
z
1
z
2
z
3
z
4
1 0,08 0,3 0,07 1,2 1
2 1 1,2 0,07 0,3 0,08
3 0,994 1,176 0,075 0,204
4 0,204 0,075 1,176 0,994
5 0,946 0,315
[b
3
= 0,994[ = 0,994 > [b
0
= 0,204[ = 0,204 Cumple
[c
2
= 0,946[ = 0,946 > [c
0
= 0,315[ = 0,315 Cumple
el sistema es estable
J. Ramrez y E. Rosero 21 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
Ejemplo
Evaluar el rango de valores de la ganancia k para que el siguiente sistema sea
estable:
+
k
R(z) C(z)
(0.3679z+0.2642)
(z0.3679)(z1)
Soluci on:
C(z)
R(z)
=
k(0,3679z + 0,2642)
z
2
+ (0,3679k 1,3679)z + 0,3679 + 0,2642k
Ecuaci on caracterstica:
1
..
a
0
z
2
+ (0,3679k 1,3679)
. .
a
1
z + 0,3679 + 0,2642k
. .
a
2
Para un sistema de segundo orden, las condiciones se reducen a:
1. [a
2
[ < a
0
2. P(1) > 0
3. P(1) > 0
De la condici on 1. se obtiene:
[0,3679 + 0,2642k[ < 1
5,1775 < 2,3925k
De la condici on 2. se obtiene:
P(1) = 0,6321k > 0
k > 0
J. Ramrez y E. Rosero 22 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
De la condici on 3. se obtiene:
P(1) = 2,7358 0,1037k > 0
k < 26,38
La soluci on es la intersecci on de las tres condiciones previas:
0 < k < 2,3925
1.3.2. Estabilidad absoluta de Sistemas Discretos con Routh
Si se usa la transformada Bilineal:
W =
z + 1
z 1
El interior del crculo unitario [z[ < 1 corresponder a en el plano complejo de
W = +jw:
z =
W + 1
W 1
+jw + 1
+jw 1
< 1
( + 1)
2
+w
2
( 1)
2
+w
2
< 1
2
+ 2 + 1 +w
2
<
2
2 + 1 +w
2
< 0
al semiplano izquierdo; por tanto, se puede aplicar el criterio de Routh en el do-
minio de W para evaluar la estabilidad absoluta.
Ejemplo
Consideremos el polinomio:
P(z) = z
3
1,3z
2
0,08z + 0,24 = 0
Soluci on:
Con
z =
W + 1
W 1
P(W) =
_
W + 1
W 1
_
3
1,3
_
W + 1
W 1
_
2
0,08
_
W + 1
W 1
_
+0,24 = 0
W
3
7,57W
2
36,43W 14,14 = 0
El sistema es inestable pues los coecientes no tienen el mismo signo.
Nota: Este procedimiento exige mas c alculos que Jury, pero permite calcular
la frecuencia de oscilacion para la Ganacia Crtica: ganancia no nula, para la cual
se obtienen polos de lazo cerrado en el eje complejo.
J. Ramrez y E. Rosero 23 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
Ejercicios propuestos
Realice los siguientes ejercicios del libro de Kuo:
Routh: 6-2, 6-3, 6-4, 6-7, 6-9
Jury: 6-18, 6-19, 6-20
Transformada Bilineal: 6-17
Resumen
En este captulo se dieron las deniciones de estabilidad de entrada-salida
e interna en tiempo continuo y discreto, para sistemas lineales e invariantes en
el tiempo. Se conoci o que la condici on para estos tipos de estabilidad se rela-
ciona directamente con las races de la ecuacion caracterstica. Para que un sis-
tema en tiempo continuo sea estable, las races de la ecuacion caracterstica deben
localizarse en el semiplano izquierdo del plano s. Para que un sistema en tiem-
po discreto sea estable, las ra`ces de la ecuacion caracterstica deben localizarse
dentro del crculo unitario en el plano z.
La condici on necesaria para que un polinomio P(s) no tenga ceros sobre el
eje jw y en el semiplano derecho del plano s es que todos sus coecientes deben
ser del mismo signo y ninguno puede ser cero. Mediante el criterio de Routh
Hurwitz, se verican las condiciones necesarias y sucientes para que P(s) tenga
ceros solamente en el semiplano izquierdo del plano s.
Para sistemas en tiempo discreto, se debe vericar la ecuacion caracterstica
P(z) para races sobre y fuera del crculo unitario en el plano z. El criterio de
Routh Hurwitz no puede aplicarse directamente a esta situacion. Un m etodo con-
able es utilizar la transformada bilineal, que transforma el crculo unitario en el
plano z en el eje imaginario de otro plano de variable compleja, y entonces se
puede aplicar el criterio de Routh Hurwitz a la ecuacion transformada.
La prueba de estabilidad de Jury permite evaluar la estabilidad absoluta de sis-
temas discretos, directamente de la ecuacion caracterstica.
J. Ramrez y E. Rosero 24 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
Actividades de aprendizaje
Los ejercicios propuestos a continuacion son para que usted los desarrolle
como parte de su preparacion y no se debe entregar ningun informe al profesor.
1. Realice:
Una lectura reexiva y crtica del material del curso.
2. Desarrolle los ejercicios propuestos en esta unidad.
3. (Ejercicio6-4. Kuo, 1996) La funcion de transferencia en lazo de un sistema
de control realimentado de un solo lazo esta dada como:
G(s)H(s) =
K(s + 5)
s(s + 2)(1 +Ts)
Los par ametros K y T pueden estar representados en el plano con K co-
mo el eje horizontal y T como el eje vertical. Determine las regiones en el
plano de par ametros de T contra K en el cual el sistema en lazo cerrado es
asint oticamente estable. Indique el lmite en el que el sistema es marginal-
mente estable.
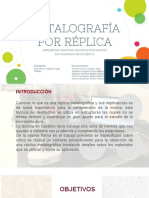
4. (Ejercicio 6-9. Kuo, 1996) En la gura 1.2 se muestra el diagrama de blo-
ques de un sistema de control de un motor con realimentacion por tac ometro.
Encuentre el intervalo de la constante del tacometro K
t
para que el sistema
sea asint oticamente estable.
r(t)
+
+
10
100
s(s+5.6)(s+10)
y(t)
K
t
s
e(t)
Figura 1.2: Sistema de realimentacion por tac ometro
J. Ramrez y E. Rosero 25 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
5. (Ejercicio6-17b. Kuo, 1996) Aplique la transformada w a la siguiente ecuacion
caracterstica del sistema de control en tiempo discreto, y determine las
condiciones de estabilidad (asintoticamente estable, marginalmente estable
o inestable) por medio del criterio de Routh-Hurwitz.
z
3
+z
2
+ 3z + 0,2 = 0
6. (Ejercicio 6-19. Kuo, 1996) La ecuacion caracterstica de un sistema de
control lineal digital es:
z
3
+z
2
+ 1,5Kz (K + 0,5) = 0
Determine los valores de K para que el sistema sea asintoticamente estable.
7. Utilice un programa para la busqueda de raices para encontrar las raices de
las siguientes ecuaciones caractersticas de sitemas lineales y determine la
condici on de estabilidad de los mismos.
s
4
+ 12s
3
+s
2
+ 2s + 10 = 0
z
3
+ 2z
2
+ 1,2z + 0,5 = 0
Lecturas complementarias
Kuo Benjamin. Sistemas de Control Automatico, Prentice Hall 1997. Captu-
lo 6: Estabilidad de sistemas de control lineales
Referencias
KUO BENJAMIN, Sistemas de Control Autom atico, Prentice Hall 1997.
J. Ramrez y E. Rosero 26 GICI
1.3. ESTABILIDAD PARA SISTEMAS EN TIEMPO DISCRETO
OGATA KATSUSHITO, Ingenier a de Control Moderno, P.H.H. 3 edicion,
1998.
OGATA KATSUSHITO, Sistemas de Control en Tiempo Discreto. P.H.H,
M ex. 1996.
J. Ramrez y E. Rosero 27 GICI
Captulo 2
An alisis mediante el lugar
geom etrico de las races
Introducci on
Las caractersticas b asicas de la respuesta transitoria de un sistema de lazo
cerrado las determinan los polos de lazo cerrado, por lo cual en el analisis de un
sistema de control es importante poder ubicar estos polos en lugares apropiados
del plano s. En el dise no de un sistema de control, el ajuste de los parametros
del controlador cambia las posiciones de los polos y ceros de lazo abierto, bus-
cando ubicar los polos del lazo cerrado en las posiciones deseadas del plano s.
Como los polos de lazo cerrado son las races de la ecuacion caracterstica, es
importante para el analisis conocer los efectos en la ubicacion de las races de
lazo cerrado cuando cambia un parametro en la ecuacion caracterstica. El lugar
geom etrico de las races son las trayectorias de la ecuacion caracterstica cuando
un par ametro de ella vara.
A continuaci on se presentan los conceptos basicos del m etodo del lugar de las
races, el procedimiento general para dibujar los lugares de las races y se analizan
los efectos de adicionar polos y ceros al lugar, para sistemas de tiempo continuo;
al nal se presentara la t ecnica del lugar de las races para sistemas de tiempo
discreto.
Objetivo
Utilizar la t ecnica del lugar geometrico de las races para el analisis de sis-
28
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
temas de control. Objetivo de aplicaci on
Contenidos
2.1. Lugar Geom etrico de las Races en tiempo con-
tinuo
El lugar geom etrico de las races, es el trazo de las races de la ecuacion car-
acterstica, para distintos valores de un parametro del sistema, normalmente la
ganancia.
2.1.1. Variaci on de Polos de Red Cerrada
Consideremos la forma canonica de un sistema de control T(s) =
G(s)
1+GH(s)
,
donde GH(s) =
kN(s)
D(s)
con k un par ametro que vara; as, T(s) =
G(s)D(s)
D(s)+kN(s)
y la
ecuaci on caracterstica es:
D(s) +kN(s) = 0
Si k 0, las races de la ecuacion caracterstica son las races de D(s) = 0;
si k , las races de la ecuacion caracterstica son las races de N(s) = 0; por
tanto, para k : [0, ), los polos de red cerrada varan desde los polos de red
abierta hacia los ceros de red abierta, donde terminan.
2.1.2. Criterios de Magnitud y
Angulo
Un punto s
1
pertenece al Lugar Geometrico de las races si cumple:
D(s
1
) +kN(s
1
) = 0
o bien GH(s
1
) = 1; para esto, se debe cumplir:
1. GH(s
1
) = 180(2L + 1), L = 0, 1, 2, ...
J. Ramrez y E. Rosero 29 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
Esta expresi on se denomina CRITERIO DEL
ANGULO y dene qu e punto
del plano s pertenece al Lugar Geometrico de las Races.
2. [GH(s
1
)[ = 1, o bien [k[ =
D
N
Esta expresi on se denomina CRITERIO DE MAGNITUD y da la ganancia
k en el punto del Lugar Geometrico de las Races.
Con estos dos criterios se podra trazar el Lugar Geometrico de las Races por
tanteos en el plano s; esta evaluaci on de forma gr aca, se ilustra para la gura,
donde se tiene un sistema con un cero en s = 2 y un par de polos complejos en
s = 1 j para la funci on de transferencia de lazo abierto.
A
B
C
K = 0
1 j
1 + j
K = 0
2
K =
S
1
0
j
Plano S
El criterio del angulo se evalua rest andole a la suma de los angulos de los
ceros, los angulos de los polos; estos angulos se obtienen entre el eje real o un eje
de jw constante y el vector dirigido entre el cero o polo y el punto s
1
; esto es:
GH(s)[
s
1
=
Si se cumple, el punto s
1
ser a una raz de lazo cerrado para algun valor de k.
J. Ramrez y E. Rosero 30 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
El criterio de magnitud es:
[k[ =
magnitud de los vectores desde polos de GH a s
1
magnitud de los vectores desde ceros de GH a s
1
[k[
s=s
1
=
A.C
B
La construcci on del Lugar por esta va sera muy dispendiosa manualmente;
el procedimiento se simplica usando las reglas de construccion del Lugar.
2.1.3. Reglas de Construcci on
1. Ordenar la ecuacion caracterstica de forma que el parametro a variar aparez-
ca como factor:
1 +
k
m
i=0
(s +z
i
)
n
j=0
(s +p
j
)
= 0
2. Las n ramas del lugar, parten de los polos p
j
hacia los ceros z
i
.
3. Hay lugar en el eje real, a la izquierda de un n umero impar de polos y ceros.
4. El lugar tiende a asntotas rectas para s que cortan el eje real en:
c
=
n
i=1
p
i
j=1
z
j
n m
y forman un angulo con el eje real de:
=
(2l + 1)180
n m
[grados] l = 0, 1, 2, ...[n m[ 1
5. El lugar entra o sale al eje real desde el punto
B
, obtenido de resolver:
n
i=1
1
B
+p
i
=
m
i=1
1
B
+z
i
J. Ramrez y E. Rosero 31 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
Los puntos de ruptura del Lugar corresponden a races de orden m ultiple
y pueden ser complejos; en general, los puntos de ruptura del Lugar deben
satisfacer:
dGH(s)
ds
= 0
dk
ds
= 0
Estas ecuaciones son solo una condicion necesaria; adicionalmente deben
satisfacer la ecuacion caracterstica para alg un k real.
6. El lugar parte o llega desde polos o ceros complejos formando angulos de:
P
= 180 +GH
(p
c
) Partida de polos complejos p
c
L
= 180 GH
(z
c
) Llegada a ceros complejos z
c
donde, GH
(p
c
) , GH
(z
c
) son los angulos de GH sin considerar la
contribuci on del polo o el cero.
7. Evaluar el corte del Lugar Geometrico de las Races con el eje imaginario
mediante el criterio de Routh.
8. Con los criterios de magnitud y angulo determinar el lugar con suciente
exactitud alrededor de eje j y el origen del plano s.
Cabe anotar que la regla 7 permite calcular el k crtico (k
c
) para inestabilidad,
cuando k corresponde a la ganancia de lazo abierto; k
c
permite calcular la medida
de estabilidad relativa:
Margen de ganancia MG: Factor por el cual se puede multiplicar la ganancia
actual k
0
del sistema, antes de que se haga inestable.
MG =
k
c
k
0
Ejemplo:
Trazar el LGDR para el sistema de control de la excitacion con excitatriz y
acci on I, variando k
I
. Considere
E
= 0,5 seg,
G
= 1 seg.
Calcule k
I
y las races para obtener 2 races complejas conjugadas con = 0,5.
J. Ramrez y E. Rosero 32 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
Soluci on:
G(s) =
k
I
s(s + 1)(0,5s + 1)
=
2k
I
s(s + 1)(s + 2)
=
k
s(s + 1)(s + 2)
, k = 2k
I
1. Par ametro de variacion k: polos de red abierta en s = 0, 1, 2 no hay
ceros de red abierta.
2. Tres ramas.
3. Lugar en el eje real (, 2) (1, 0)
4. 3 Asntotas:
* Centroide:
c
=
1 + 2
3
= 1
*
Angulos eje real:
l = 0 =
180
3
= 60; l = 1 = 180; l = 2 = 300
5. Punto de separaci on:
1
B
+
1
B
+ 1
+
1
B
+ 2
= 0
3
2
B
+ 6
B
+ 2 = 0
B1
= 0,42,
B2
= 1,57
Como no hay lugar en el eje real entre (2, 1)
B1
= 0,42
6. No hay polos o ceros complejos de red abierta.
J. Ramrez y E. Rosero 33 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
7. Se obtuvo:
k
I
critico =
E
+
G
G
= 3 k = 6
s
12
= j
_
1
G
w =
_
1
G
=
2
Como la ecuaci on auxiliar: s
2
+2 = 0 es factor de la ecuacion caracterstica,
entonces:
E.C.
E.A.
= s + 3
raz real para k = 6
8. Puntos en cercana del origen:
En el punto de despegue:
k =
1
GH(0,42)
= 0,385
Raz real
E.C.
(s + 0,42)
2
= s + 2,16
Races complejas con = 0,5 = 60
o
Se asume la parte real = 0,4 (menor que -0.42)
s
P
= 0,4 j0,4 tan() = 0,4 j0,7
Criterio del angulo:
GH(s
P
) = s
P
(s
P
+ 1) (s
P
+ 2) = 180
GH(s
P
) = 193 No cumple
s
P
= 0,3 j0,3 tan() = 0,3 j0,5
GH(0,3 j0,5) = 173 No cumple
GH(0,33 j0,58) = 180 Cumple!
J. Ramrez y E. Rosero 34 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
Criterio de la magnitud:
k
s(s + 1)(s + 2)
s
P
= 1
s(s + 1)(s + 2)
s
P
= k
k = 1,04 , k
I
= 0,52
E.C.
(s + 0,33 + j0,58)(s + 0,33 j0,58)
= s + 2,33
s
3
= 2,33 raz real para k = 1,04
Con k
0
= 1,06, tenemos un margen de ganancia de:
MG =
k
c
k
o
=
6
1,04
= 5,77
0
j
j2
K
K
3 2
1
j
j2
j
K = 1.04
K = 0.385
K = 6
K = 1.04
K = 0.385
= 0.5
60
K = 6
J. Ramrez y E. Rosero 35 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
2.1.4. Contorno de las races
Permite analizar los efectos de cambios en mas de un par ametro.
Ejemplo:
Sistema de control de la excitacion con excitatriz, accion I y red estabilizado-
ra.
v
R
(s)
+
+
+
k
I
s
1
E
s+1
1
G
s+1
v
T
(s)
Ts
F
s+1
k
I
s(s+1)(s+2)
1 +
Ts(
G
s+1)
(
F
s+1)
v
R
(s) +
v
T
(s)
Con
F
=
G
; H(s) = 1 +Ts
Encontrar k
I
y T para que el sistema cumpla:
a) e
ssv
1
3
b) 0,4
c) t
s
6 seg (5 %)
Soluci on:
Las especicaciones en terminos de ganancia y ubicacion deseada de races son:
J. Ramrez y E. Rosero 36 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
a)
e
ssv
=
1
K
v
1
3
; K
v
3
K
v
= lm
s+
s
k(1 +Ts)
s(s + 1)(s + 2)
=
k
2
k 6
b) Races de red cerrada en el semiplano izquierdo por debajo de la lnea
= cos
1
(0,4) = 66,4
o
c) t
s
=
3
wn
6 seg (5 %) w
n
0,5 esto es tener races complejas
con parte real 0,5.
j
0.5
Area Deseada
de Localizacion
de las Raices
La funci on de transferencia de red abierta es:
GH(s) =
k(1 +Ts)
s(s + 1)(s + 2)
Consideremos inicialmente las variaciones de k, asumimos entonces T = 0
GH
1
(s) =
k
s(s + 1)(s + 2)
Esta GH tiene el LGDR del ejemplo anterior.
J. Ramrez y E. Rosero 37 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
Para las variciones de T, asumimos k constante
E.C.
s
3
+ 3s
2
+ 2s +k(1 +Ts) = 0
1 +
kTs
s
3
+ 3s
2
+ 2s +k
= 0 (Regla 1)
GH
2
(s) =
kTs
s
3
+ 3s
2
+ 2s +k
Los polos donde inicia el lugar de GH
2
dependen de k y corresponden al
lugar de GH
1
; para k = 6, tenemos
1.5 3
j
asintota
k = 6
Las asntotas tienen centroide en
c
= 1,5 con angulos = 90
o
.
Como el coeciente de s
2
en la ecuaci on caracterstica es 3 independiente de k y
corresponde a la suma de los polos de GH
2
, entonces la asntota es del contorno.
J. Ramrez y E. Rosero 38 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
Angulo de partida en el polo s = j
d
= 180 +ang
_
s
(s +j
2)(s + 3)
_
s=j
2
= 154,8
o
Gracando GH
2
para varios k:
K = 20
T = 0
3.85 4 3 2 1
Plano S
Contorno de las raices sobre el eje real
T =
0
K = 3, T = 0
K = 6, T = 0
K = 3, T = 0
K = 6, T = 0
K = 20, T = 0
K = 3
K = 6
K = 20
K
T = 1/2
T = 1
T = 1/2
T
T = 1/2
T = 1
T = 7/30
K = 20, T = 0
T = 1/2
T = 7/30
T = 1/2
T = 1
T = 1
T
T = 1
T = 1/2
K
Contorno de las raices
Asintota del contorno
Figura 2.1: Lugar de las races
J. Ramrez y E. Rosero 39 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
Con k = 6, T = 1:
s
12
= 1 j2,23 s
2
+ 2s + 6 = 0,41, w
n
= 2,45
s
3
= 1
s
123
cumplen las especicaciones.
2.1.5. Efectos de adicionar Polos y Ceros al Lugar
La adici on de un polo a GH(s) desplaza el lugar hacia el semiplano derecho.
Plano S
Plano S
a
a/2
0
K
K
j
K = 0
K = 0
(a) (b)
K
K = 0 K = 0
b
a
0
K
K
K = 0
K
K
b =
j
K
K
K = 0
c b a
K = 0 K = 0
0
K = 0
K
K
K
K
K
K
b = c =
c =
Plano S
j
a 0
K = 0 K = 0
K
K
K = 0
K = 0
K
K
j
Plano S
J. Ramrez y E. Rosero 40 GICI
2.1. LUGAR GEOM
ETRICO DE LAS RA
ICES EN TIEMPO CONTINUO
La adici on de ceros a GH(s) desplaza el lugar hacia la izquierda.
(c)
K =
c
b
a
0
K K
K
K
K = 0 K = 0
K = 0
Plano S
j
(a)
K
K =
b
a a/2 0
K = 0
K
K = 0
b =
j
Plano S
(b)
K =
b
a
a/2 0
K = 0
K
K = 0
j
Plano S
c
J. Ramrez y E. Rosero 41 GICI
2.2. LGDR PARA SISTEMAS DE TIEMPO DISCRETO
2.2. LGDR Para Sistemas de Tiempo Discreto
Para un sistema de control digital, la ecuacion caracteristica es:
1 +GH(z) = 0
Tiene la misma forma de la ecuacion caracterstica usada para trazar el lugar de
las races en el plano S: 1 + GH(s) = 0; por lo tanto, las reglas de construccion
de LGDR en el plano Z son las mismas usadas para determinar el LGDR en el
plano S.
Claro est a que la ubicaci on de las races en Z tiene un signicado distinto con
relaci on a la respuesta transitoria, permanente y la estabilidad del sistema.
Ejemplo:
An alisis con el LGDR del funcionamiento de un sistema de control digital, para
una planta de primer orden sujeta a una accion integral, ante variaciones del
perodo de muestreo: T = 0,5, 1 y 2 seg.
R(z)
+
1e
Ts
s
1
s+1
C(z)
T
k
1z
1
Soluci on:
G(z) =
kz
z 1
Z
_
1 e
Ts
s(s + 1)
_
=
kz
z 1
1 e
T
z e
T
La tabla muestra los valores de G(z), para cada valor de T.
T G(z)
0.5
0,3935kz
(z1)(z0,6065)
1
0,6321kz
(z1)(z0,3679)
2
0,8647kz
(z1)(z0,1353)
J. Ramrez y E. Rosero 42 GICI
2.2. LGDR PARA SISTEMAS DE TIEMPO DISCRETO
Las guras siguientes muestran los diversos lugares generados al variar k para
cada G(z) y el valor de los polos para k = 2.
Circulo unitario
Re
Im
Plano Z
Circulo unitario
Re
Im
Plano Z
Circulo unitario
Re
Im Plano Z
K = 2.626
K = 2.164
K = 0.4622
0.1353
1
K = 2
Z
12
= 0.3 j0.21
= 0.36 = 143.9
T=2 seg
K = 4.328
K = 4.083
K = 2
K = 0.2449
1
0.3679
T=1 seg
Z
12
= 0.051 j0.6
= 0.32
= 85.1
K = 8.041
0.7788
K = 8.165
0.6065
1
K = 0.1244
K = 2
Z
12
= 0.41 j0.66
= 0.24 = 58.2
T=0.5 seg
De los lugares se puede observar que:
Si T aumenta el k crtico disminuye junto con el Margen de Ganancia por
lo tanto es sistema se vuelve menos estable.
J. Ramrez y E. Rosero 43 GICI
2.2. LGDR PARA SISTEMAS DE TIEMPO DISCRETO
Si la rata de muestreo no es lo suentemente alta , no es indicador de
estabilidad relativa.
Respuestas a un escal on unitario en la referencia:
kT(s)
c(kT)
0 1 2 3 4 5 6 7 8
0.5
1.0
1.5
kT(s)
c(kT)
0 1 2 3 4 5 6 7 8
0.5
1.0
1.5
kT(s)
c(kT)
0 1 2 3 4 5 6 7 8
0.5
1.0
1.5
K=2
m : # de muestras por ciclo de oscilacion amortiguada: m =
360
T=0.5, = 58,2 m = 6,18
T=1, = 85,1 m = 4,23
T=2, = 143,9 m = 2,5
J. Ramrez y E. Rosero 44 GICI
2.2. LGDR PARA SISTEMAS DE TIEMPO DISCRETO
Se observa que con un T alto sube un poco el sobrepaso y c(kT) ya no da una
buena representaci on de c(t); recu erdese que se recomienda tomar de 8 a 10
muestras por ciclo.
Las guras muestran las respuestas a una rampa unitaria en la referencia:
kT(s) 1 2 3 4 5 6 7 8 9
2
4
6
8
10
c(kT)
0
Error en estado permanente = 1.00
1 2
3
4 5 6
2
4
6
c(kT)
kT(s)
Error en estado permanente = 0.50
0 1 2 3 4 5
2
4
6
c(kT)
kT(s)
Error de estado estable = 0.25
K = 2
0
K
v
= lm
z1
(1 z
1
)G(z)
T
e
ss
=
1
K
v
T
T=0.5 K
v
=
2
0,5
= 4
T=1 K
v
=
2
1
= 2
T=2 K
v
=
2
2
= 1
El e
ss
se increment o de forma proporcional al perodo de muestreo T.
J. Ramrez y E. Rosero 45 GICI
2.2. LGDR PARA SISTEMAS DE TIEMPO DISCRETO
Ejercicios propuestos
Realice los siguientes ejercicios propuestos:
LGDR continuo : 8-7, 8-8, 8-11, 8-17
+contorno: 8-20
LGRDiscreto: 8-23,8-24
Resumen
En esta unidad se han presentadolas tecnicas del lugar geometrico de las races
para sistemas de control lineales tanto para sistemas continuos como para sistemas
discretos. Las propiedades y construccion del lugar geometrico de las races en el
plano z son en esencia los mismos que aquellos para sistemas en tiempo continuo.
La t ecnica representa un metodo gr aco para investigar las races de la ecuacion
caracterstica cuando uno o mas par ametros varan. Se pueden utilizar programas
de computadora para realizar la gr aca del lugar geometrico de las races y obten-
er mayor informaci on detallada.
Actividades de aprendizaje
Los ejercicios propuestos a continuacion son para que usted los desarrolle
como parte de su preparacion y no se debe entregar ningun informe al profesor.
1. Realice:
Una lectura reexiva y crtica del material del curso.
2. Desarrolle los ejercicios propuestos de este captulo.
3. (Evaluaci on 1, 25 de febrero de 2005) La gura 3 muestra un sistema de
control de primer orden sujeto a una accion de control PI.
a) (20 %) Con a = 0, calcule el rango de valores de k para el cual el
sistema es estable.
J. Ramrez y E. Rosero 46 GICI
2.2. LGDR PARA SISTEMAS DE TIEMPO DISCRETO
R(z)
+
0.4
z0.6
C(z)
k(za)
z1
T = 0.5seg
Figura 2.2: Sistema 1
b) (10 %) con a = 0, muestre que el LGDR para variaciones de k, descri-
ba una circunferencia en el plano z con centro en el origen, para raices
complejas.
c) (30 %) Con a = 0 calcule el LGDR en el eje real, el centroide y angulo
de las asintotas y los puntos de despegue o llegada del lugar al eje real.
d) (30 %) Trace un boceto del LGDR, a = 0 en el abaco de la gura 2.3;
el sistema puede responder como uno de tiempo continuo, con tiempo
de estabilizaci on menor de 4 segundos (criterio del %)?
e) (10 %) Utilice los criterios de magnitud y angulo para calcular k y a,
de forma que el sistema tenga un par de polos complejos con = 0,5
y
n
= 1,88
4. (Evaluaci on 1, 3 de marzo de 2006) La gura 2.4 muestra el LGDR para
la variaci on de la ganancia k de un sistema de control digital realimentado
unitario, con periodo de muestreo de 1 seg.
a) (20 %) Calcule el rango de valores de k para el cual el sistema es es-
table.
b) (20 %) Cual es la frecuencia de la oscilacion para el sistema marginal-
mente estable?.
c) (20 %) Ajuste k de forma que el sistema tenga un par de polos com-
plejos conjugados con = 0,5
d) (10 %) Cual es el margen de ganancia para este ajuste?.
e) (30 %) La din amica del sistema con el k del punto c. se puede aproxi-
mar a una de segundo orden?.
J. Ramrez y E. Rosero 47 GICI
2.2. LGDR PARA SISTEMAS DE TIEMPO DISCRETO
1 0.8 0.6 0.4 0.2 0 0.2 0.4 0.6 0.8 1
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
/T
0.9/T
0.8/T
0.7/T
0.6/T
0.5/T
0.4/T
0.3/T
0.2/T
0.1/T
/T
0.9/T
0.8/T
0.7/T
0.6/T
0.5/T
0.4/T
0.3/T
0.2/T
0.1/T
Figura 2.3: Abaco
5. Considere un sistema con realimentacion unitaria con la siguiente funcion
de transferencia de la trayectoria directa G(s):
G(s) =
K(s + 2)
2
(s
2
+ 4)(s + 5)
2
Graque los lugares geometricos de las raices para el sistema con Matlab.
Lecturas complementarias
Kuo Benjamin, Sistemas de control automatico, Prentice Hall, 1997. Captu-
lo 8: La t ecnica del lugar geometrico de las raices.
J. Ramrez y E. Rosero 48 GICI
2.2. LGDR PARA SISTEMAS DE TIEMPO DISCRETO
1 0.5 0 0.5 1
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T
0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Root Locus
Real Axis
I
m
a
g
in
a
r
y
A
x
is
k=1
k=0.62
k=0.15
k=1
k=0.26
k=0.30
k=0.35
k=0.42
k=0.16
k=0.18
k=0.20
k=0.23
Figura 2.4: LGDR de un sistema dado
Referencias
KUO BENJAMIN, Sistemas de Control Autom atico, Prentice Hall 1997.
OGATA KATSUSHITO, Ingenier a de Control Moderno, P.H.H. 3 edicion,
1998.
OGATA KATSUSHITO, Sistemas de Control en Tiempo Discreto. P.H.H,
M ex. 1996.
J. Ramrez y E. Rosero 49 GICI
Captulo 3
An alisis mediante la respuesta en
frecuencia
Introducci on
Por el t ermino respuesta en frecuencia se entiende la respuesta en estado de
r egimen permanente de un sistema ante una entrada sinusoidal. Esta respuesta se
puede representar gr acamente de diversas formas; tambien tiene una estrecha
relaci on con la funci on de transferencia del sistema, lo que hace de esta her-
ramienta un m etodo muy poderoso para analizar y disenar sistemas de control.
Este m etodo es especialmente util para controlar el ancho de banda del sistema
y evitar amplicar ruido en el lazo; tambien lo es para evaluar la estabilidad in-
cluyendo variaciones de la funcion de transferencia a controlar (estabilidad robus-
ta) y para sistemas con tiempos muertos.
En este captulo se presentar a el an alisis en el dominio de la frecuencia de
una funci on de transferencia por medio de diagramas de magnitud y fase de bode,
gr acas polares, y el criteriode estabilidad de Nyquist tanto para sistemas de tiem-
po continuo como discretos.
Objetivos
Utilizar los conceptos y las tecnicas de respuesta de frecuencia para el analisis
de sistemas de control. Objetivo de aplicaci on
50
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
Contenidos
3.1. Respuesta en Frecuencia en tiempo continuo
Es la respuesta de un sistema en estado estable a una senal sinusoide de entrada
con frecuencia variable.
x(t) G(S) y(t)
Donde:
x(t) = xsen(wt)
y(t) = ysen(wt + )
La determinaci on experimental de la respuesta en frecuencia es simple por la fa-
cilidad de generar x(t) y de medir y(t).
y(t) es una sinusoide de magnitud y fase distinta a la de la entrada pero con la
misma frecuencia. La relacion de magnitudes y el desfase en la respuesta de fre-
cuencia, estan directamente relacionados con la funcion de transferencia:
G(S)
S=jw
= G(jw) Funci on de Transferencia Sinusoidal
G(jw) = [G(jw)[ G(jw)
[G(jw)[ =
y
x
; G(jw) =
G(jw) dene la respuesta de frecuencia del sistema y es una funcion compleja
de la frecuencia w:
G(jw) = U(jw) +jV (jw)
3.1.1. Gr acas de Respuesta en Frecuencia
La respuesta de frecuencia de un sistema se puede representar mediante:
Gr aca polar: parte real (U) versus la imaginaria (V) de G(jw); tambi en se
llama el plano de G(jw); requiere de c alculos manuales tediosos y no indica
el efecto de los polos o ceros individuales por lo que debe trazarse con un
computador. Esta gr aca permite evaluar la estabilidad con el criterio de
Nyquist al igual que medidas de desempeno robusto.
J. Ramrez y E. Rosero 51 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
Diagramas de Bode: son dos gr acos, magnitud (en decibeles) y fase versus
la frecuencia,
20Log[G(jw)[ vs Log w
(w) vs Log w
Con el eje de frecuencias lineal en Log w se representan intervalos grandes
de frecuencia; la magnitud en decibeles permite buena presicion para val-
ores grandes y peque nos de [G(jw)[, trazos que tienden a lneas rectas y la
facilidad de adicionar polos o ceros sumando las gr acas de cada termino.
Por ello se simplica el calculo y la descripcion gr aca de la respuesta de
frecuencia. La fase se da en una escala lineal en grados o radianes. El eje de
frecuencias usualmente se da en d ecadas, donde una decada corresponde a
un intervalo de frecuencias dentro del cual la frecuencia nal es 10 veces la
inicial. Una limitacion de esta gr aca es el analisis de estabilidad limitado
para G(s) con polos inestables.
Diagrama de Black: db[G(jw)[ vs con par ametro w; presenta informa-
ci on equivalente a la del diagrama de Bode; con la carta de Nichols, da
informaci on de respuesta de frecuencia en red cerrada.
3.1.2. Caractersticas de Funcionamiento en Frecuencia
Son valores importantes que permiten analizar el funcionamiento del sistema;
a continuaci on se presentan las mas importantes y se dan las f ormulas de calculo
para sistemas de segundo orden.
M aximo pico de Resonancia y Frecuencia de Resonancia. El maximo pico
de resonancia, M
PW
, es valor m aximo de [G(jw)[; la Frecuencia de Reso-
nancia: w
R
, es la frecuencia a la cual ocurre M
PW
.
La M
PW
permite preveer cual ser a la m axima salida para el barrido de fre-
cuencia; sistemas con M
PW
elevados se pueden destruir si se exitan con
frecuencias cercanas a la de resonancia y es por ello que se considera como
un indicio de la estabilidad relativa del sistema.
Para sistemas de segundo orden:
M
PW
=
1
2
_
1
2
, 0 0,707
R
=
n
_
1 2
2
, 0 0,707
J. Ramrez y E. Rosero 52 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
Bandas, Frecuencias de Corte y Ancho de Banda: en la banda pasante las
componentes frecuenciales pasan a trav es del sistema con aproximadamente
la misma atenuacion o amplicaci on; en la banda de parada, las compo-
nentes frecuenciales no pasan a la salida, esto es, [G(jw)[ en esta banda,
es mucho menor que [G(jw)[ en la banda pasante. Entre estas dos bandas
podemos hablar de una banda de transicion intermedia. La frecuencia de corte w
c
,
es la frecuencia para la cual 20Log[G(jw)[ est a 3db por debajo de:
su valor a frecuencia cero para respuestas frecuenciales paso bajo o de
rechazo de banda,
su valor a alta frecuencia, para respuestas frecuenciales paso alto,
M
PW
en la banda pasante, para respuestas frecuenciales pasa banda.
El ancho de banda w
ab
, mide la banda pasante o de rechazo; w
ab
= w
c1
w
c2
, donde w
c1
> w
c2
0, siendo w
ci
las frecuencias de corte en cada lado
de la banda pasante. Para los paso bajos, w
c1
= 0.
Los sistemas de segundo orden nomalizados son paso bajos con 20Log[G(0)[ =
0:
w
c
= w
ab
= w
n
_
(1 2
2
) +
_
4
4
4
2
+ 2
w
c
es un indicativo de velocidad de respuesta para los paso bajos.
Rata de Corte: es la pendiente de 20Log[T(jw)[ en cercanas a w
c
o bien
de 20Log[GH(jw)[ en cercanas a la frecuencia para la cual 20Log[GH(jw)[ =
0 (w
g
). Es un indicativo de la capacidad del sistema para discriminar senal
de ruido.
Margen de Ganancia: recproco de GH(jw) en la frecuencia donde la fase
es 180
o
, frecuencia de fase crtica w
.
MG =
1
[GH(jw
)[
MG = 20Log[GH(jw
)[ [db]
Es el factor por el cual se puede aumentar la ganancia del sistema para que
alcance el lmite de estabilidad; para un sistema de segundo orden:
w
, MG
J. Ramrez y E. Rosero 53 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
Margen de fase: angulo que el lugar de GH(jw) se debe girar alrededor del
origen para que el punto de magnitud unitaria, [GH(jw
g
)[ = 1, pase por
(1, 0); w
g
se denomina frecuencia de ganancia crtica.
M
= 180
o
+GH(jw
g
)
Para un sistema de segundo orden con 0 < < 1:
M
= tan
1
2
_
_
1 + 4
4
2
2
M
= 100
Los MG y M
son medidas de estabilidad relativa.
Margen de Retardo. Es tambien una medida de estabilidad relativa; esta aso-
ciado con los Sistemas con Retardos o tiempos muertos; en ellos la salida
solo responda despu es de un tiempo dado:
La Funci on de Transferencia Senoidal: G
R
(jw) = e
T
d
jw
= 1 T
d
w ;
a una frecuencia dada, el retardo no cambia la magnitud pero si adiciona un
retardo de fase de T
d
w
.
J. Ramrez y E. Rosero 54 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
Se puede por tanto, convertir el margen de fase en un margen de retardo , en-
tendido como el tiempo de retardo maximo que puedo adicionar a la dinami-
ca de lazo abierto GH(s), antes de que el sistema se haga inestable en red
cerrada. Como el M
se calcula en la w
g
, entonces:
M
R
=
M
w
g
Margen del M odulo: Es una medida mas global de la distancia entre punto
crtico (1, 0) en la gr aca polar y el lugar de GH(jw); es el radio del
crculo centrado en (-1,0), tangente a GH(jw)
Im(GH)
Re(GH)
1
MG
M
MM
1
g
J
J
M
M
= [1 +GH(jw)[
min
= [
1
S
cd
[
min
=
1
[S
cd
[
max
Si se reduce el m aximo de la funci on S
cd
= 1/(1 +GH(jw)) (sensibilidad
perturbaci on salida), el M
M
aumenta, mejorando la estabilidad relativa.
3.1.3. Correlaci on Tiempo-Frecuencia
Una desventaja del metodo de an alisis en respuesta de frecuencia, es su relacion
indirecta con la respuesta transitoria del sistema; veamos algunas de estas rela-
J. Ramrez y E. Rosero 55 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
ciones a partir de las expresiones dadas para sistemas de segundo orden:
M
s olo es funci on de ; se puede asociar el grado de amortiguamiento de
la se nal en el tiempo con el margen de fase.
Si merma M
PT
, M
PW
aumentan, luego la M
PW
da una idea de
la M
PT
.
w
g
, w
c
son inversamente proporcionales al tiempo de subida t
R
=
3
2g
Para peque nos w
R
= w
d
= w
N
= w
g
Para sistemas de orden superior al segundo se pueden aplicar estas correlaciones
si existe un par de polos complejos dominantes.
La Respuesta Permanente si tiene una relacion directa con la de frecuencia,
puesto que el tipo de sistema determina la forma de la curva de 20Log[GH(jw)[ a
baja frecuencia.
Para sistemas de tipo cero la asntota de baja frecuencia es una horizontal de al-
tura 20 Log K
P
ya que:
K
P
= lm
s0
GH(s) = lm
jw0
GH(jw)
Para sistemas tipo uno:
K
V
= lm
jw0
GH(jw)jw
Si solo se considera el polo en el origen, GH(jw) =
K
V
jw
a baja frecuencia;
en w = 1 tenemos:
20Log[GH(jw)[
w=1
= 20LogK
V
Luego la interseccion de la asntota de baja frecuencia o su prolongacion con la
recta w = 1 vale 20LogK
V
.
De forma an aloga, para sistemas tipo 2, la interseccion de la asntota de baja fre-
cuencia con w = 1 es 20LogK
A
. Calculadas las constantes de error, se puede
conocer el e
ss
para cada entrada tpica.
J. Ramrez y E. Rosero 56 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
3.1.4. Especicaciones de Funcionamiento
De la correlaci on tiempo-frecuencia y de la experencia en diseno se tienen las
siguientes especicaciones:
40 M
70
M
G
6 db
Ratas de corte de 20Log[GH(jw)[ y 20Log[T(jw)[ en cercanias de w
g
y w
c
re-
spectivamente, de 20db/dec.
w
R
, w
g
, w
c
tan grandes como sea posible sin afectar la estabilidad ni
entrar en los rangos de frecuenciencia del ruido del sistema.
Pendiente y altura de 20Log[GH(jw)[ a baja frecuencia que garantice
el e
ss
aceptable.
El M
M
impone lmites mnimos de buen desempe no para el rechazo de
perturbaciones; se especica como valor apropiado: M
M
0,5 (6db),
mnimo 0,4 ( 8db).
Si se desea un error permanente nulo en estado estable ante un escalon de
disturbio:
S
cd
(s = 0) = 0 =
1
1 +GH(0)
GH(0) GH(s) debe tener un integrador en G(s).
Tambi en es deseable que en ciertas bandas de frecuencia no se amplique
el efecto de la perturbacion, por ello se impone una cota a [ S
cd
(jw) [ ; se
especica:
M
M
=
1
[S
cd
[
max
0,5 [S
cd
(jw)[ 2 (6db) , w
Tambi en se puede mostrar que el M
M
impone tolerancias con relacion a
alinealidades y elementos variantes con el tiempo del sistema.
Note que un M
M
> 0,5 implica un M
G
2 (6db) y un M
> 30
; en
general un buen M
M
garantiza buenos M
G
y M
; buenos M
G
y/o buenos
M
no necesariamente garantizan un buen M
M
.
J. Ramrez y E. Rosero 57 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
3.1.5. Diagramas de Bode en T erminos Simples
Para el trazo de un diagrama de Bode, conviene primero llevarlo a la Forma
de Bode:
GH(jw) =
k
B
m
j=1
_
1 +
jw
z
j
_
(jw)
N
n
i=1
_
1 +
jw
p
i
_
q
k=1
_
1 + 2
k
jw
w
k
_
w
w
k
_
2
_
Donde k
B
es la Constante de Bode.
Magnitud [db]:
20Log [GH(jw)[ = 20Logk
B
+20
m
j=1
Log
1 +
jw
z
j
20Log
(jw)
N
Fase:
(jw) =
m
j=1
tan
1
_
w
z
j
_
N(90
o
)
Se observa por tanto que los diagramas de magnitud y fase total, son la suma
gr aca de cada factor individual y que existen solo 4 terminos simples:
1. Ganancia constante k
B
.
2. Polos o ceros en el origen.
3. Polos o ceros en el eje real.
4. Polos o ceros conjugados complejos.
J. Ramrez y E. Rosero 58 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
1. Ganancia constante: recta horizontal de altura 20Logk
B
, (jw) = 0
o
, k
B
>
0; (jw) = 180
o
, k
B
< 0.
10
2
10
1
10
0
10
1
10
2
180
135
90
45
0
45
90
135
180
(rad/s)
G
(
j
)
(
G
r
a
d
o
s
)
40
30
20
10
0
10
20
30
40
G
(
j
(
d
B
)
20Log
10
K dB (K=10)
K (K>0)
K (K<0)
J. Ramrez y E. Rosero 59 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
2. Polos o ceros en el origen; en w = 1, 20 Log (1) = 0db.
10
2
10
1
10
0
10
1
10
2
360
270
180
90
0
90
180
0
(rad/s)
G
(
j
)
(
g
r
a
d
o
s
)
100
80
60
40
20
0
20
40
60
G
(
j
(
d
B
)
+
4
0
d
B
/d
c
a
d
a
(j
)
2
(1/j)
(1/j)
3
+20dB
/dcada (j
)
20dB/dcada (1/j)
4
0
d
B
/d
c
a
d
a
(1
/j
)
2
6
0
d
B
/d
c
a
d
a
(
1
/j
)
3
(j)
2
(j)
(1/j)
2
J. Ramrez y E. Rosero 60 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
3. Polos o ceros en el eje real.
Diagrama de bode de (1 +jwT)
1
40
30
20
10
0
10
20
30
40
G
(
j
(
d
B
)
10
2
10
1
10
0
10
1
10
2
90
45
0
45
90
(rad/seg)
G
(
j
)
(
g
r
a
d
o
s
)
1
G(s) =
1+Ts
Asintticas
G(s) = 1+Ts
G(s) = 1+Ts
1
G(s) =
1+Ts
J. Ramrez y E. Rosero 61 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
4. Polos o ceros cojugados complejos.
Diagrama de bode para G(jw) = [(1 + (2/w
n
)jw + (jw/w
n
)
2
]
1
10
2
10
1
10
0
10
1
10
2
180
135
90
45
0
u=/
n
Relacin de frecuencia
G
(
j
)
(
g
r
a
d
o
s
)
40
30
20
10
0
10
20
30
40
G
(
j
(
d
B
)
= 0.05
= 0.1
= 0.2
= 0.3
= 0.5
= 1
= 1
= 0.5
= 0.3
= 0.2
= 0.1
= 0.05
J. Ramrez y E. Rosero 62 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
Ejemplo
Analizar la estabilidad relativa del sistema de control de la excitacion con excita-
triz y acci on I; evaluar la constante de accion integral k
I
para un M
= 60
o
;
considere
G
= 1,
E
= 0,2.
Soluci on:
G(s) =
k
I
s (s + 1) (0,2s + 1)
Forma de Bode:
G(s) =
1
..
k
I
s
..
2
(s + 1)
. .
3
_
s
5
+ 1
_
. .
4
1. Con k
I
= 1 Mdb = 20 Log1 = 0.
2. Mdb con pendiente 20 db/dec y en w = 1; Mdb = 0;
2
= 90.
3. Mdb con pendiente 20 db/dec a partir de w
c
= 1; fase con pendiente
de 45
o
/ dec para 0,1 w 10.
4. Igual al t ermino 3. con w
c
= 5.
Los m argenes de ganacia y de fase se evaluanen el Diagrama de Bode de G(jw).
J. Ramrez y E. Rosero 63 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
50
40
30
20
10
0
10
20
30
40
50
M
a
g
n
i
t
u
d
e
(
d
B
)
10
2
10
1
10
0
10
1
10
2
270
225
180
135
90
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Gm = 15.6 dB (at 2.24 rad/sec) , Pm = 43.2 deg (at 0.779 rad/sec)
Frequency (rad/sec)
Del diagrama w
g
= 0,78 w
= 2,24.
M
= 180 (w
g
) = 180 136,8 = 43,2
o
; M
G
= 20Log [G(w
)[ = 15,6db
De la aproximaci on
= 0,01M
= 0,43, el sobrepaso estimado es de 0.22 %.
Para ajustar k
I
de forma que se obtenga un M
= 60
o
, se observa que
la curva de fase vale 120
o
en w = 0,42; la Mdb(w = 0,42)
= 6db.
Cambiar k
I
equivale a variar la constante de Bode, luego incrementos o decre-
mentos en k
I
suben o bajan la curva de magnitud; para bajar 6 db, necesita-
mos multiplicar la ganancia inicial por una constante de atenuacion k
AT
; luego
20Logk
AT
= 6 k
AT
= 0,5.
k
I
60
o
= 0,5k
I
43,2
o
= 0,5
J. Ramrez y E. Rosero 64 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
3.1.6. Respuesta en Red Cerrada
La magnitud pico de frecuencia, la frecuencia de resonancia y el ancho de
banda se leen de la respuesta de frecuencia de red cerrada:
T(jw) M
PW
, w
R
, w
c
Los m argenes de ganancia y de fase se leen de la respuesta de frecuencia de red
abierta:
GH(jw) M
G
, M
Podemos obtener ambas curvas f acilmente con un computador; sinembargo, para
el an alisis y dise no, es conveniente obtener T(jw) a partir de GH(jw).
Si
H(jw) = 1, G(jw) = U +jV
T(jw) =
G
1 +G
=
U +jV
1 +U +jV
Magnitud M(w) = [T(jw)[ =
U
2
+V
2
_
(1 +U)
2
+V
2
Manipulando obtenemos
_
M
1 M
2
_
2
=
_
U
M
2
1 M
2
_
+V
2
Esta ecuaci on describe una familia de crculos de magnitud de res cerrada M con-
stante en el plano de G, con centro en
_
M
2
1M
2
, 0
_
y radio
M
1M
2
.
La intersecci on de la gr aca polar de G(jw) con el crculo de M constante, da
la magnitud de T(jw) en la frecuencia indicada para G(jw); as, el crculo de
mayor M tangente a G(jw) corresponde a la magnitu pico de frecuencia M
PW
y la frecuencia en el punto de tangencia corresponde ala frecuencia de resonancia
W
R
.
De forma similar, se obtienen los crculos N de fase constante para T(jw).
Nichols pas o los crculos de M y N constantes del plano polar al plano de Black y
obtuvo lo que se conoce como la Carta de Nichols ; en ella se tienen los contornos
de M[db] y N[
o
] constantes, en ejes coordenados de Mdb vs
o
.
J. Ramrez y E. Rosero 65 GICI
3.1. RESPUESTA EN FRECUENCIA EN TIEMPO CONTINUO
Ejemplo: Evaluar M
PW
, w
R
, y w
c
para el sistema de control de la ex-
citaci on con acci on Integral y excitatriz,
G
= 1,
E
= 0,2 k
I
= 1:
G =
1
s(s+1)(0,2s+1)
. EL contorno de M constante de mayor valor esta entre 2 y 3 db,
luego M
PW
= 2,5 db y la tangencia se da aproximadamente en w
R
= 0,8. Para
el ancho de banda, observamos que en baja frecuencia se sigue la curva M de 0
db; luego el ancho de banda sera en el corte con el contorno Mde -3db: w
c
= 1,35.
Los m argenes de ganacia y de fase los leemos de los ejes de Black; el de
ganacia como la distancia de G en 0db, al corte con
G
= 180
o
; el de fase como
la distancia entre
G
= 180
o
y el corte con G = 0db, ver la gura.
Nichols Chart
OpenLoop Phase (deg)
O
p
e
n
L
o
o
p
G
a
i
n
(
d
B
)
180 135 90 45 0
20
10
0
10
20
30
6 dB
3 dB
1 dB
0.5 dB
0.25 dB
0 dB
1 dB
3 dB
6 dB
12 dB
20 dB
=1.35
=0.8
=0.5
J. Ramrez y E. Rosero 66 GICI
3.2. CRITERIO DE ESTABILIDAD DE NYQUIST
3.2. Criterio de Estabilidad de Nyquist
Los m argenes de ganancia y de fase tratan de evaluar la cercana de la curva
de respuesta de frecuencia en la gr aca polar (lugar de Nyquist) al punto (1, 0).
Im(GH(jw))
Re(GH(jw))
1
GH(s) =
1
s(s+1)
GH(s) =
1
s+1
Lugar de
Lugar de
w = 0 (jw)
w =
| GH(jw) |
1 +GH(jw)
GH(jw)
w = 0
(jw)
1
EL vector desde el origen a un punto de la curva, representa a GH(jw) para una
cierta frecuencia w.
El vector desde el punto (-1,0) a la gr aca de GH(jw), forma un angulo con
el eje real y tiene magnitud [1 + GH(jw)[; note que 1 + GH(jw) =
D(jw)
C(jw)
es
la Funci on de Transferencia Sinusoidal entre el disturbio y la salida, esto es, la
ecuaci on caracterstica con s = jw; su inversa es la Funci on de Sensibilidad Per-
turbaci on-Salida S
cd
.
J. Ramrez y E. Rosero 67 GICI
3.2. CRITERIO DE ESTABILIDAD DE NYQUIST
G(s)
H(s)
R(s)
C(s)
+
+
C(s)
D(s)
= S
cd
=
1
1+GH(s)
D(s)
+
Note que si el lugar de GH(jw) pasa por el punto crtico (1, 0), la ecuaci on
caracterstica ser a nula en una frecuencia especca y el sistema en red cerrada no
es asint oticamente estable; por tanto, una condicion necesaria (mas no suciente)
para que el sistema sea asintoticamente estable, es que el lugar de GH(jw) no
pase por (1, 0); el Criterio de Nyquist establece condiciones necesarias y su-
cientes para la estabilidad asintotica del sistema en red cerrada:
(1) Para GH(s) estable (Repolos de GH 0), propia y de fase mnima,
el lugar de GH(jw) recorrido en el sentido de frecuencias crecientes, debe
dejar a la izquierda el punto (1, 0). Para sistemas de fase no mnima, esta
es solo una condici on necesaria.
(2) Para GH(s) inestable (Repolos de GH > 0) y propia, el lugar de GH(jw)
recorrido en el sentido de las frecuencias crecientes, debe dejar a la izquier-
da el punto (1, 0) y el n umero N de rodeos del punto crtico (-1,0) en el
sentido sinestrogiro, debe ser igual al numero de polos inestables de red
abierta.
En general: N = #polos inestables
. .
Z
RC #polos inestables RA
. .
P
(3) Criterio Generalizado: para GH(s) propia, estable o inestable, de fase mni-
ma o no-mnima, con P
w
polos en el eje complejo, el angulo total recorrido
por para frecuencias crecientes, debe ser positivo (sinestrogiro).
En general: = (P Z + 0,5Pw)180.
J. Ramrez y E. Rosero 68 GICI
3.2. CRITERIO DE ESTABILIDAD DE NYQUIST
Ejemplos:
a.) De la gura para GH(s) =
1
s+1
, tenemos que P = 0 y Pw = 0.
De (1), el punto (-1,0) esta a la izquierda del lugar de GH(jw), luego es
estable.
De (3), (0) = 0; () = 0 luego el recorrido de = 0; as, P Z +
0,5Pw = 0 Z = 0 y no hay polos inestables de RC.
b.) Para GH(s) =
1
s(s+1)
tenemos P = 0, Pw = 1.
De (1), el punto crtico est a a la izquierda, sistema estable.
De (3), (0) = 90; () = 0; el recorrido es () (0) = +90, as:
90 = (Z + 0,5 1)180 Z = 0, sistema estable.
c.) Para GH(s) =
[s
2
s+1]
[s(s
2
6s+5)]
_
P = 2
Pw = 1
=
= 0
1
J. Ramrez y E. Rosero 69 GICI
3.2. CRITERIO DE ESTABILIDAD DE NYQUIST
El recorrido de es + 90, 90 = (2 Z + 0,5)180
Z = 2, sistema inestable.
Note que GH(jw), no rodea el punto (1, 0) y los m argenes son: M
G
= , M
=
91
o
, lo que muestra la invalidez de ellos para evaluar la estabilidadcuando GH(jw)
tiene polos inestables.
Nota: Si GH(s) tiene ceros inestables o tiempo muerto, es de fase no mni-
ma pero puede ser estable; en tal caso, el criterio de Nyquist 1) aun aplica y los
M
G
> 0, M
> 0 y M
M
> 0 implican estabilidad en red cerrada y se pude usar
Bode para analizar la estabilidad del sistema.
Si GH(s) es inestable, los signos de los margenes no necesariamente implican
estabilidad o inestabilidad, entonces, no se puede usar Bode para analisis de esta-
bilidad; se debe usar Nyquist o el Lugar de las Races.
Ejemplo:
GH(s) =
k
s(s+2)(s+10)
; el lugar de GH(jw) se puede bosquejar a partir de
la intersecci on con el eje real del plano polar, y de los valores de GH(jw) a alta
(w ) y baja (w 0) frecuencia.
GH(jw) =
k
jw(jw + 2)(jw + 10)
GH (j0) = 90 ; GH(j)
k
jw
= 0 270
Racionalizando
GH(jw) =
k
jw(w
2
+ 12jw + 20)
=
k
jw(20 w
2
) 12w
2
GH(jw) =
k[jw(20 w
2
) 12w
2
]
144w
2
+w
2
[20 w
2
]
2
=
k[12w j(20 w
2
)]
w[144w
2
+ (20 w
2
)
2
]
Los posibles cortes con el eje real se obtienen de: ImGH(jw) = 0
J. Ramrez y E. Rosero 70 GICI
3.2. CRITERIO DE ESTABILIDAD DE NYQUIST
k[20 w
2
]
w[144w
2
+ (20 w
2
)
2
]
= 0
w = y w
= +
20 [rad/seg].
Evaluando, se obtiene que GH (j
20) =
k
240
, si
GH (j
20) =
k
240
> 1, k < 240
el punto (-1,0) queda a la izquierda de GH(jw), ver la gura.
Im(GH(jw))
Re(GH(jw))
=
1
=
20
Con k
c
= 240 el sistema es marginalmente estable y el sistema oscilara con
una frecuencia de
20 [rad/seg].
J. Ramrez y E. Rosero 71 GICI
3.3. RESPUESTA DE FRECUENCIA DE SISTEMAS DISCRETOS
Con k > 240:
= 0
=
Re(GH(jw))
Im(GH(jw))
1
El vector 1 +GH(jw) gira 270
o
destrogiro
270 = ( Z + 0,5) 180 Z = 2
El sistema tiene dos races inestables.
3.3. Respuesta de Frecuencia de Sistemas Discretos
La respuesta en frecuencia para un sistema continuo GH(s) se obtiene evalu-
ando la frecuencia s en jw: s jw; para un sistema de tiempo discreto, la fun-
ci on de transferencia discreta GH(z) se obtiene va la transformaci on z = e
sT
;
por tanto, la respuesta de frecuencia de los sistemas discretos se obtiene evaluan-
do z = e
jwT
.
GH(z)[
z=e
jwT : Funci on de Transferencia de pulsos senoidal.
Observe que e
j(w+(2/T)T
= e
jw
e
j2
= e
jw
; por tanto, GH(e
jwT
) es una
funci on compleja peri odica con la frecuencia w, con periodo T; por la simetra
del plano Z con el eje real, basta trazar GH(e
jwT
) para w [0,
ws
2
=
T
].
Ejemplo:
Respuesta de frecuencia para GH(z) = 1/(z 0,5).
J. Ramrez y E. Rosero 72 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
=
s
2
1
J
=
3
4
s
J
Im(z)
Re(z)
p
=
s
1
= 0,
s
GH(z) =
1
z0.5
T = 1
Im(GH)
Re(GH)
|GH|
2
3
=
s
2
= 0
Plano Z
GH(e
jw
) =
1
e
jw
0.5
GH(e
jw
) =
1
p
=
s
4
Plano GH
P
3.4. Estabilidad en Respuesta de Frecuencia Para
Sistemas Discretos
La estabilidad de la ecuacion caracterstica 1+GH(z) = 0 se puede tambi en
analizar con el criterio de estabilidad de Nyquist, aplicado al lugar de GH(z =
e
jw
) con 0 < w < , donde w = wT es una frecuencia normalizada.
Im(GH(e
j w
))
Re(GH(e
j w
))
1
1 + GH
GH
= 0
Plano GH(e
jw
)
Punto critico
=
J. Ramrez y E. Rosero 73 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
Para que el sistema sea asintoticamente, los ceros de 1 + GH(z) en el plano
Z, deben estar en el interior del circulo unitario [z[ < 1; ello se d a si el angulo
total recorrido por para frecuencias crecientes de cero a w
s
/2 es positivo; en
general:
= (P Z + 0,5Pw) 180
P : # polos inestables de GH(z) ([polos de GH(z)[ > 1)
Pw : # polos en el circulo unitario de GH(z) ([polos de GH(z)[ = 1)
Z : # ceros inestables de 1 + GH(z) ([ polos de
G(z)
1 +GH(z)
[ > 1)
3.4.1. M argenes de Estabilidad
La estabilidad relativa se mide tambien con los m argenes de ganancia, fase,
m odulo y retardo. La denicion es la misma cambiando GH(jw) GH(e
jw
).
Las especicaciones deseadas de desempeno se mantienen:
M
G
2 (6db) ; 30 M
60 ; M
M
0,5 ( 6db)
El margen de retardo M
R
=
M
[rad]
wg [
rad
seg
]
T (minimo
2 T
3
)
Ejemplo:
R(s) +
T =
2
E(z)
ROC
1.57
s(s+1)
C(s)
C(z)
w
s
=
2
T
= 4 [rad/seg]
G
1
(z) = (1 z
1
) Z
_
1,57
s
2
(s + 1)
_
=
1,22z + 0,73
(z 1)(z 0,2)
=
1,22 (z + 0,6)
(z 1)(z 0,2)
con ROC
J. Ramrez y E. Rosero 74 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
G
2
(z) = (1 z
1
)Z [
1,57
s(s + 1)
] =
1,24z
(z 1)(z 0,2)
sin ROC.
Im(G(e
jwT
))
Re(G(e
jwT
))
MG = 5.7dB
= 2
MG = 0.7dB
= 2
0.5
0
0
M = 39
M = 2.92
Con ROC
Sin ROC
Para ambos ceros: P = 0. Pw = 1, = 90 90 = (Z + 0,5) 180.
z = 0 sistema estable en RC.
El ROC degrada los margenes de estabilidad. Ya no se nota con claridad donde
Diagramas de Bode
MdB
40
30
20
10
0.1 1 2 0.01
180
135
90
0.01
0.1 1 2
empieza a actuar el polo en z = 0,2 ni el cero; el trazo va hasta w = 2, luego de
w = 4, se repetira, luego el trazo no tiende a asntotas rectas; ello se debe a que
GH(e
jwT
) ya no es una funci on racional de w.
J. Ramrez y E. Rosero 75 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
3.4.2. La transformada Bilineal o transformada W
Esta transformada se dene como: z =
1 +
T
2
W
1
T
2
W
; ella lleva al plano de W ,
donde GH(j W ) es de nuevo racional con W ; la relaci on entre w y W , se obtiene
de la transformaci on inversa:
W =
2
T
[z 1]
[z + 1]
=
2
T
e
sT
1
e
sT
+ 1
=
2
T
tan
sT
2
Con s = jw Im[W] = v =
2
T
tan
wT
2
La transformaci on s z W de la banda primaria es:
c
d
b
J
J
ws
2
ws
2
b
d
a c
c
a
d
W
bT
z = e
sT
W =
2
T
z+1
z1
2
T
Plano S
Plano Z
Plano W
El crculo unitario del plano Z, se traslada a todo el semiplano izquierdo del plano
W .
s : 0 jw
s
/2 z : 1 1
W : 0
La ecuaci on v =
2
T
tan[
wT
2
], relaciona la frecuencia analoga w a la cticia v;
un ancho de banda analogo w
B
se traslada al plano W a un ancho de banda
v
B
=
2
T
tan[
w
B
T
2
] ; si wT es peque no: tan[
wT
2
]
wT
2
v w G(jw) G(jv) (a baja frecuencia w ).
J. Ramrez y E. Rosero 76 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
El factor de escala 2/T usado en la transformada W mantiene las mismas con-
stantes de error de G(S).
En general si G(z) =
bo z
m
+ b
1
z
m1
+ . . . + bm
z
n
+ a
1
z
n1
+ . . . . + an
m n
y se aplica z =
1 + T/2 W
1 T/2 W
G(W) =
0
W
n
+
1
W
n1
+ . + . + . + n
0
W
n
+
1
W
n1
+ . + . + . + n
Los grados de los polinomios del numerador y denominador pueden ser difer-
entes a los de G(z).
Ejemplo:
+
T = 0.2
ROC
1
s(s+1)
C(s)
C(z)
K
G(z) = 0,018K
(z + 0,93)
(z 1)(z 0,81)
Para pasar al plano W : z =
(1+0,1 W)
(10,1 W)
G(W) = 0,0033K
(W + 300) ( 0,1 W + 1)
W (W + 0,997)
=
(
W
300
+ 1) (
W
10
+ 1)
W (
W
0,997
+ 1)
Note:
La constante de Bode K
B
es la misma para G(s) y G( W )
Los denominadores de G(s) y G( W ) son similares, tienen casi los mismos
polos.
Si G(s) tuviera ceros, tambien los tendra similares G( W ).
Aparecieron dos ceros en G(W); uno despreciable en W = 300 y uno
J. Ramrez y E. Rosero 77 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
inestable en W = 2/T = 10 ellos se deben al muestreo y retencion, su valor
depender a de T y si T es peque no, no tendr an un efecto importante; el cero en
W = 10, afectar a bastante el diagrama de Bode cuando v 10=2/T; esto
corresponde a un ancho de banda W
c
de:
2
T
=
2
T
tan[
W
c
T
2
]
W
c
=
2/T
=
w
s
4
Est a por tanto en el rango de frecuencias de interes, por ser inestable dara atraso
de fase, mermando la estabilidad del sistema; la gr aca muestra el diagrama de
Bode con los M
G
y M
, para K = 2.
Respuesta en frecuencia 2G(W)
20
0
20
40
60
MdB
0.1 0.4 1
4 10 40 100 400
0
90
180
270
MG = 15dB
M = 30
0
Resumen
Esta unidad se dedic o al an alisis en el dominio de la frecuencia de sistemas
de control lineales. Se denieron las especicaciones de desempeno tales como el
pico de resonancia M
r
, la frecuencia de resonancia
r
y el ancho de banda w
c
y
sus rangos aceptables para disenar un sistema.
Se plante o el criterio de Nyquist para el analisis de estabilidad de sistemas de
control lineales.
J. Ramrez y E. Rosero 78 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
Por ultimo, todas las especicaciones en el dominio de la frecuencia denidas
para sistemas an alogos se pueden extender a sistemas en tiempo discreto. La trans-
formada W tambi en se aplica a la gracacion de las trazas de Bode de sistemas en
tiempo discreto.
Actividades de aprendizaje
Los ejercicios propuestos a continuacion son para que usted los desarrolle
como parte de su preparacion y no se debe entregar ningun informe al profesor.
1. Realice:
Una lectura reexiva y crtica del material del curso.
2. Desarrolle los ejercicios propuestos de este captulo.
3. (Segunda evaluaci on, abril 7 de 2006) En la gura 3.1 se presenta la respues-
ta de frecuencia en la carta de Nichols, para el sistema de control mostrado
en la gura 3.2; desde la gr aca, con K = 1, estime:
a) (10 %) Las m argenes de ganancia y fase.
b) (15 %) La magnitud pico de frecuencia en red cerrada, la frecuencia
de resonancia y el ancho de banda.
c) (10 %) El error permanente, para una entrada de referencia escalon
unitario.
d) (10 %) El valor de K para que el sistema tenga un margen de ganancia
de 20 db.
e) (10 %) El valor de K para que el sistema tenga un margen de fase de
45
o
.
f ) (10 %) El valor de K para que el sistema tenga un ancho de banda de
30 rad/seg.
g) (15 %) El valor de K para que el sistema sea marginalmente estable;
cual es la frecuencia de la oscilacion sostenida?.
J. Ramrez y E. Rosero 79 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
Figura 3.1: Diagrama de Nichols
R(s)
K
G(s)
D(s)
C(s) +
-
+
+
Figura 3.2: sistema de control
h) (10 %) La magnitud pico de c(t) si r(t) = 0 y d(t) = sen2t, con
K = 1.
J. Ramrez y E. Rosero 80 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
i) (10 %) El valor m aximo del tiempo muerto en la trayectoria directa,
para que el sistema permanezca estable
4. (Segunda evaluaci on, abril 8 de 2005) Las guras 3.3 y 3.4 muestran los
diagramas de bode de G(s) y la carta de Nichols, para el sistema con K = 2:
100
80
60
40
20
0
20
40
M
a
g
n
i
t
u
d
e
(
d
B
)
10
1
10
0
10
1
10
2
450
405
360
315
270
225
180
135
90
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (rad/sec)
Figura 3.3: Diagrama de bode
A partir de los gr acos, muestre el procedimiento, calcule y/o estime:
a) (12 %) Las m argenes de ganancia y fase.
b) (12 %) La magnitud pico de frecuencia en red cerrada, la frecuencia
de resonancia y el ancho de banda en red cerrada.
J. Ramrez y E. Rosero 81 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
Nichols Chart
OpenLoop Phase (deg)
O
p
e
n
L
o
o
p
G
a
i
n
(
d
B
)
225 180 135 90 45 0
20
10
0
10
20
30
6 dB
3 dB
1 dB
0.5 dB
0.25 dB
0 dB
1 dB
3 dB
6 dB
12 dB
20 dB
=0.1
=0.2
=0.4
=1
=2
=3
=4
=6
Figura 3.4: Diagrama de Nichols
c) (12 %) Los errores permanentes de posicion y velocidad.
d) (12 %) La forma de onda de la salida c(t) para r(t) = sen2t.
e) (12 %) La forma de onda del error e(t) para para una entrada senoidal
r(t) = sen2t.
f ) (10 %) El valor de K para que el sistema tenga un M.G. = 10.
g) (10 %) El valor de K para que el sistema tenga un ancho de banda de
1 rad/seg.
h) (20 %) G(s)
5. (Kuo [1996], problema 9.9). Trace la gr aca polar y calcule el M
G
y M
J. Ramrez y E. Rosero 82 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
para los trazos asint oticos de:
G(s) =
10
s(1 + 0,5s)(1 + 0,1s)
(3.1)
G(s) =
10(s + 1)
s(s + 2)(s + 10)
(3.2)
6. (Kuo [1996], problema 9.10). Las FdT de lazo de un sistema de control
de un solo lazo se dan a continuacion. Aplique el critierio de Nyquist y
determine los valores de K para que el sistema sea estable. Dibuje la traza
de Nyquist de L(jw) con K = 1 desde = 0 hasta = . Puede emplear
un programa de computadora para gracar las trazas de Nyquist.
G(s) =
K
s(s + 2)(s + 10)
(3.3)
G(s) =
K(s
2
5s + 2)
s(s
3
+ 2s
2
+ 2s + 10)
(3.4)
G(s) =
K(s
2
5s + 2)
s(s + 1)(s
2
+ 4)
(3.5)
G(s) =
K(s 2)
s(s
2
1)
(3.6)
7. (Kuo [1996]). Ejercicios del libro de Kuo: 9.12, 9.14, 9.21, 9.29, 9.30, 9.31,
9.32, 9.37, 9.38, 9.39, 9.40, 9.41, 9.45, 9.46
Lecturas complementarias
Kuo Benjamin, Sistemas de Control Automatico, Prentice Hall, 1997. Ca-
pitulo 9: An alisis en el dominio de la frecuencia.
Referencias
J. Ramrez y E. Rosero 83 GICI
3.4. ESTABILIDAD EN RESPUESTA DE FRECUENCIA PARA SISTEMAS DISCRETOS
KUO BENJAMIN, Sistemas de Control Autom atico, Prentice Hall 1997.
OGATA KATSUSHITO, Ingenier a de Control Moderno, P.H.H. 3 edicion,
1998.
OGATA KATSUSHITO, Sistemas de Control en Tiempo Discreto. P.H.H,
M ex. 1996.
J. Ramrez y E. Rosero 84 GICI
Captulo 4
Dise no de sistemas de control
Introducci on
A lo largo del curso se han estudiado tecnicas que permiten analizar el com-
portamiento de los sistemas de control realimentados; sabemos que el objetivo
principal de los sistemas de control es el de disminuir el error del sistema bien sea
por cambios del mismo, ruidos o disturbios; este objetivo se traduce en especi-
caciones deseadas de desempeno que deben lograrse con un diseno apropiado;
dise nar un sistema de control es por tanto encontrar uno que cumpla estas especi-
caciones.
En este captulo se analizaran las diferentes estrategias de control que se us-
an en el dise no de los sistemas de control. Se analizaran inicialente los aspectos
generales del dise no, se pasar a luego al caso mas simple de ajuste de contro-
ladores PID simples de una bucla tpica realimentada, en tiempo continuo; se us-
ar an las t ecnicas de an alisis del lugar de las races y respuesta de frecuencia, para
este prop osito; tambien se usar an estrategias simples que incluyan cancelaciones
polo-cero estables; para problemas mas complejos se estudiaran otras estrategias
complementariaso en extension del lazo simple, como el control directo de pertur-
baci on o el control en cascada; nalizaremos el captulo con el estudio del diseno
de sistemas de control digitales, en donde estudiaremos un diseno por sntesis.
Objetivos
1. Dise nar sistemas de control realimentados mediante los metodos del lugar
85
4.1. DISE
NO DE SISTEMAS DE CONTROL
geom etrico de las races, respuesta de frecuencia y diseno analtico. Obje-
tivos de aplicaci on y evaluaci on.
Contenidos
4.1. Dise no de Sistemas de Control
El procedimiento de diseno de los sistemas de control requiere de ciclos, en
los cuales se itera a trav es del modelado, analisis, dise no, simulaci on, prueba e
implementaci on. El dise no tambi en puede tomar diferentes formas con diferentes
estrategias, no es lo mismo el diseno para un producto de consumo masivo como
el posicionador del laser de un DVD, o el control no de posicion en procesos de
manufactura; en el primer caso el bajo costo de la solucion es determinante y debe
llevar a soluciones simples; en el segundo, puede ser mas elaborada y esta asoci-
ada a un an alisis de costo-benecio.
En muchos casos el dise no se desarrolla as:
1. Se analiza cualitativamenteel sistema; se identicanlos elementos y senales
importantes del lazo; se establecen objetivos de control.
2. Se modela el sistema; se simplica el modelo, de ser necesario.
3. Se analiza el modelo resultante, se determinan sus propiedades.
4. Se escogen las variables a controlar.
5. Se escogen las variables a medir y a manipular y sus respectivos sensores y
actuadores
6. Se denen unas especicaciones deseadas de desempeno, basadas en los
objetivos de control.
7. Se escoge la arquitectura del control.
J. Ramrez y E. Rosero 86 GICI
4.1. DISE
NO DE SISTEMAS DE CONTROL
8. Se selecciona el tipo de controlador a usar: PID, adelanto-atraso, RST etc.
Normalmentese buscan los controladores mas simples que permitan cumplir
las especicaciones.
9. Se dise na el controlador, esto es, se obtienen los parametros (por an alisis o
sntesis), que permiten cumplir las especicaciones.
10. Se analiza el sistema controlado para vericar si cumple las especica-
ciones; si no se cumplen, se cambia el tipo de controlador o las especi-
caciones.
11. Se verica en simulacion digital (y/o en un prototipo), la respuesta en fre-
cuencia y/o la temporal ante diversas entradas y perturbaciones; se analizan
los efectos de din amicas no modeladas y alinealidades. Reajustes.
12. Se repite desde el paso 2 si es necesario. Reajustes.
13. Se escoge el soporte fsico y logico y se implementa el control obtenido al
sistema.
14. Se prueba y valida el sistema, vericando el desempeno temporal y/o fre-
cuencial. Se reajusta el controlador en lnea si es necesario.
Los pasos 1 a 3 y el 6, se han tratado previamente; vimos herramientas para
analizar el funcionamiento de un sistema de control, buscando determinar sus
caractersticas:
Grado de estabilidad: MG, M.
Precisi on en estado estable: e
ssp
, e
ssv
.
Respuesta transitoria: M
PT
,t
s
, t
r
, t
p
.
Respuesta en frecuencia: w
c
, w
r
, M
PF
.
Robustez:funciones de sensibilidad.
Dise nar un sistema de control, es encontrar uno que cumpla las especicaciones
deseadas de desempe no denidas en el paso 6; las especicaciones se establecen
como valores o rangos aceptables de las caractersticas de desempe no para los
cuales se considera que el comportamiento del sistema es apropiado, tambien se
pueden dar en t erminos de un ndice de desempeno.
J. Ramrez y E. Rosero 87 GICI
4.1. DISE
NO DE SISTEMAS DE CONTROL
Los pasos 4, 5 y 7 est an asociados a la seleccion de la arquitectura del control
y trataremos algunos de estos aspectos mas adelante para sistemas de una entrada
una salida; para sistemas multivariables (fuera del alcance de este curso), exis-
ten t ecnicas analticas que permiten soportar al Ingeniero en estos pasos. En este
captulo nos centraremos en el estudio de los pasos 8, 9 y 10. Los pasos restantes,
se tratan en lo posible de tener en cuenta en el proyecto pr actico que acompana
este curso.
Una vez que el sistema de control esta operativo, el ciclo de vida de la solu-
ci on contin ua con su mantenimiento, esto incluye reajustes por cambios de op-
eraci on del proceso o de componentes del lazo, fallas en el lazo o simplemente
una modernizaci on tecnol ogica de la planta. Tambien en ciertos casos se puede
requerir el renamiento de la solucion, en particular cuando las especicaciones
de desempe no cambian por mayores exigencias en el mercado o la legislacion, o
bien, por la disponibilidad de mejores sensores o actuadores que hacen economi-
camente viable su instalacion por las mejoras de desempeno a obtener. En al-
gunos casos, se puede requerir en la operacion de un sistema de control, un es-
tudio forense para corregir un problema de control dado o dignosticar una falle
grave en ela operacion del sistema.
4.1.1. M etodos de Dise no del Controlador
Para el dise no del controlador en el paso 9, si se tienen especicaciones dadas
por valores o rangos, se puede utilizar un diseno por an alisis, donde por tanteo y
error se busca cumplir las especicaciones; para el analisis se puede utilizar el
lugar de las races o la respuesta en frecuencia del sistema; este metodo exige del
ingenio y experiencia por parte del disenador y es util para problemas de control
de sistemas con pocas entradas y salidas, bajo orden y pocas especicaciones.
Para sistemas multivariables o monovariables con altas exigencias de desempeno,
o especicaciones con ndices, es mas apropiado un dise no por sntesis, en donde
a partir de las especicaciones, se aplica un procedimiento que directamente (sin
tanteos) lleva al controlador que cumple los requerimientos dados. Bajo este en-
foque se estudiar a en este captulo, la t ecnica de asignacion de polos para ajustar
controladores PID y RST de sistemas monovariables y la realimentacion de es-
tados para sistemas multivariables en el pr oximo captulo. En el curso electivo
de control optimo, se estudian tecnicas de dise no bajo este enfoque para sistemas
mono-multivariables con especicaciones de ndices de desempeno.
J. Ramrez y E. Rosero 88 GICI
4.1. DISE
NO DE SISTEMAS DE CONTROL
4.1.2. Arquitectura del Control
Asumiendo que la planta es inalterable, en un lazo simple un primer paso para
cumplir las especicaciones, sera variar la ganancia del lazo:
R(s)
+
k
p
G
p
(s)
H(s)
C(s)
k
p
deber a ser lo m as alta posible para disminuir el error de estado estacionario,
pero respetando los requerimientos de estabilidad relativa; esto impondr a un k
p
m aximo, para el cual habra un error permanente debido a disturbios o bajo tipo en
la planta.
Si GH(s) es de primer orden, se puede ajustar k
p
para cumplir el error perma-
nente y vericar que se obtenga la velocidad de respuesta apropiada.
Si GH(s) es de segundo orden:
j
k
p
con el sistema subamortiguado la parte real de las races no depende de k
p
;
ajustando k
p
para = 0,7, si el tiempo de estabilizacion
4
n
es mayor que el
deseado, entonces el control Proporcional no es adecuado aun si se cumple con el
error permanente.
Si GH(s) es de tercer orden o mas, con alta ganancia el sistema se hace in-
estable, pudi endose calcular la k
p
crtica con el criterio de Routh.
Si k
p
no es suciente para cumplir las especicaciones, se deben usar uno o var-
ios compensadores de las deciencias de desempeno; dependiendo del n umero de
J. Ramrez y E. Rosero 89 GICI
4.1. DISE
NO DE SISTEMAS DE CONTROL
compensadores y su ubicacion en el lazo de control, se tienen diferentes arquitec-
turas de compensaci on o control; las m as usadas, son:
Compensaci on Serie
R(s)
+
G
C
(s)
U(s)
G
P
(s)
H(s)
C(s)
Es la bucla de realimentacion tpica, la conguracion m as empleada en la
pr actica.
Compensaci on de Realimentaci on o Paralela
U(s)
G
P
(s)
C(s)
G
C
(s)
H(s)
R(s)
+
Muy usada con control-actuacion integrada en los primeros sistemas de con-
trol.
Realimentaci on de Estado
R(s) +
X = AX +BU
X C(s)
K
C
Se genera la se nal de control mediante la realimentacion de las variables de es-
tado a trav es de ganancias. Normalmente requiere de un observador de los estados
no medidos; se ver a en la pr oxima unidad.
J. Ramrez y E. Rosero 90 GICI
4.1. DISE
NO DE SISTEMAS DE CONTROL
Compensaci on Serie-Realimentada
R(s)
+
H(s)
G
C2
(s)
G
C1
(s)
U(s)
G
P
(s)
C(s)
R(s) +
G
C1
(s)
G
C2
(s)
U(s)
G
C2
(s)
G
P
(s)
H(s)
C(s)
Como su nombre lo indica, es una combinacion de estas dos estrategias.
Compensaci on Prealimentada
a) de entrada b) directa de referencia
R(s)
G
C2
(s)
+
G
C1
(s)
U(s)
G
P
(s)
C(s)
H(s)
R(s)
G
C2
(s)
+
G
C1
(s)
+
+
G
P
(s)
H(s)
U(s)
C(s)
Tambi en se puede usar con un compensador de realimentacion; note que la
din amica G
C2
(s) no afecta los polos o ceros del lazo; esta estrategia busca mejorar
la respuesta transitoria ante variaciones de la referencia R(s).
Compensaci on Directa de Disturbio
R(s)
+
G
C1
(s)
+
+
U
G
C2
(s)
D(s)
G
P1
(s)
H(s)
G
P2
(s)
+
+
C(s)
El disturbio debe ser medi-
do; compensa fuertemente
los efectos del disturbio,
antes de que aparezcan en
la salida.
J. Ramrez y E. Rosero 91 GICI
4.1. DISE
NO DE SISTEMAS DE CONTROL
Compensaci on en Cascada
R
1
(s)
+
G
C2
(s)
R
2
(s)
+
G
C1
(s)
U(s)
G
P1
(s)
H
1
(s)
H
2
(s)
C
1
(s)
C
2
(s)
G
P2
(s)
A partir de se nales internas de la planta (medidas), se adicionan uno o var-
ios lazos internos de realimentacion; divide la planta para resolver el problema
de control por tramos, mediante controladores simples; cada bucla interna dara su
aporte al rechazo de disturbios, robustez, linealizacion, etc; es costoso y puede dar
respuestas lentas a la referencia.
Por supuesto que se pueden tener esquemas de control, con multiples convina-
ciones entre todos los anteriores.
4.1.3. Reglas para el Dise no
Para el dise no en el tiempo y/o frecuencia, las siguientes reglas son de utilidad:
El dise no en el tiempo se basa principalmente en el LGDR.
El dise no en frecuencia se basa en manipular la ganancia y la fase de GH(s).
Busque nodos dominantes de red cerrada, subamortiguados con = 0,7
o 0,4 1; si no se admite sobrepaso use = 1.
No hay una relaci on exacta entre las caractersticas entre los dominios de
tiempo y frecuencia. w
c
1
tr
; MG, m ; M
PT
, M
PW
1
.
Polos y ceros del compensador pueden cancelar ceros y polos estables de la
planta, Rp, z < 0.
J. Ramrez y E. Rosero 92 GICI
4.1. DISE
NO DE SISTEMAS DE CONTROL
En la pr actica, los polos y ceros de la planta varan o su valor es impreciso,
generando una cancelacion inexacta en la FDT de red cerrada; sin embargo, el po-
lo no cancelado quedara muy cerca del cero en red cerrada, por lo que su residuo
en la expansi on de fracciones sera muy peque no, contribuyendo poco a la respues-
ta transitoria en red cerrada, pudiendose despreciar.
Cero del compensador,
cero de la red cerrada
Polo de la planta
Polo de red cerrada
j
4.1.4. Restricciones para el Dise no
Polos o ceros inestables de la planta no se pueden cancelar, pues la can-
celaci on inexacta dejara un polo inestable en red cerrada que aunque tenga
residuo peque no, con el tiempo tendera al innito, dominando de manera
inestable la respuesta del sistema.
La respuesta del sistema la dominan los polos mas cercanos al origen del
plano S; la respuesta es mas r apida para los polos mas a la izquierda del
plano S.
Si los polos dominantes estan m as a la izquierda, el sistema tendra may-
or velocidad de respuesta y ancho de banda; en tal caso, mayores son las
se nales de control, lo que puede exigir un actuador mayor.
Los ceros estables de red cerrada aumentan el sobrepaso, lo pueden gener-
ar a un si el sistema es sobreamortiguado; entre mas lento el cero, mayor
ser a el sobrepaso, esto impone un compromiso entre una r apida velocidad
de respuesta al escal on y peque no sobrepaso (M
PT
1
cts
, c el valor del
cero).
J. Ramrez y E. Rosero 93 GICI
4.1. DISE
NO DE SISTEMAS DE CONTROL
Los ceros inestables de red cerrada generan subpaso; entre mas lento el
cero, mayor ser a el subpaso, esto impone un compromiso entre una r apida
velocidad de respuesta al escalon y peque no subpaso (M
MT
1
cts
, c el valor
del cero inestable).
Para la compensaci on serie con acci on integral en el controlador, si se ajus-
tan los polos de red cerrada con parte real a la izquierda de un cierto valor,
entonces se cumple que [Goodwin]: (1) un cero real estable a la derecha
de los polos de red cerrada producira sobrepaso en la respuesta al escalon;
(2) Un cero real inestable siempre producira sobrepaso en la respuesta al
escal on, siendo mayor entre mas cerca est e al origen; (3) cualquier polo real
de red abierta a la derecha de los polos de red cerrada, producira sobrepaso.
Lo anterior implica que el ancho de banda de red cerrada debe ser menor que
el menor cero inestable de red abierta y mayor que la parte real de cualquier
polo inestable de red abierta. En el caso particular de tener ceros resonantes
en el eje complejo, en la respuesta al escalon habr an grandes excursiones
transitorias en el error, si el ancho de banda de red cerrada es mayor que la
frecuencia de resonancia de los ceros.
El ruido en la medicion impone lmites superiores en el ancho de banda del
lazo cerrado.
Para evitar saturacion en el m aximo del actuador, se debe limitar el ancho
de banda del lazo cerrado.
El actuador puede tener un lmite mnimo de respuesta, lo que afecta la
precisi on de estado estable del lazo.
Los disturbios imponen anchos de banda mnimos en el lazo cerrado. Los
errores de modelado imponen anchos de banda maximos en el lazo cerrado.
El tiempo muerto baja los desempenos en el rechazo a disturbios y en gen-
eral en el ancho de banda del lazo.
Son ceros de red cerrada los ceros de G(s) y los polos de H(s).
Entre mayor es el tipo del sistema mejor es la presicion permanente, pero se
puede degradar el transitorio; un sistema tipo 2, tiene errores de posicion y
velocidad nulos, pero como
_
0
e(t)dt = 0, forzosamente habr a sobrepaso
en la respuesta al escalon en la compensaci on serie.
J. Ramrez y E. Rosero 94 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
En la respuesta de frecuencia de Mdb de T(s) o S(s), la diferencia de las
areas por debajo y encima de 0db, es nita; por tanto, si se disena el lazo
para tener baja ganancia en un rango de frecuencias, las funciones de sen-
sibilidad, van a incrementarse en otro rango de frecuencias (efecto colchon
de agua).
Es importante anotar que restricciones de diseno como la respuesta temporal in-
versa por ceros inestables o el efecto colchon de agua en la respuesta de frecuen-
cia, son fundamentales e independientes del metodo de dise no y de la arquitec-
tura del control.
N otese que estas limitaciones provienen de diferentes fuentes, por ejemplo, el
m aximo ancho de banda esta limitado por la velocidad de respuesta del actuador
y su m axima salida, los errores de modelado, los retardos y los ceros inestables o
complejos. De los diferentes factores, se debe priorizar en el diseno el de mayor
impacto, buscando que todos estos factores generen errores del mismo orden, esto
es, manejando homogeneidad en el diseno.
4.2. Dise no de Sistemas de Control An alogos
4.2.1. Dise no con el Controlador PD
La funci on de transferencia del controlador Proporcional Derivativo es:
G
C
(s) =
K
p
(1 +T
d
s)
1 +T
d
s
K
p
: Ganancia Proporcional,
T
d
: Conatante de tiempo Derivativa,
T
d
: Constante de tiempo parasita, del orden de 0,1T
d
.
La acci on D, mejora el amortiguamiento, reduce el sobrepaso, los tiempos de
subida y de estabilizacion; no act ua en r egimen estable; se debe por tanto ajustar
K
p
en funci on de los requerimientos de error estacionario y T
d
en funci on de la
respuesta transitoria y la estabilidad relativa requeridas.
Por tener dos par ametros ajustables, se puede emplear el contorno de las races.
Ejemplo
J. Ramrez y E. Rosero 95 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
G
P
(s) =
815265
s(s + 361,2)
; se desea: e
ssv
0,000433; SP
5 %; t
s
0,005 seg
G
C
(s) = k
p
(1 +T
d
s) = K
p
+K
d
s
C(s)
R(s)
=
815265(K
p
+K
d
s)
s
2
+ (361,2 + 815265K
d
)s + 815265K
p
Se ha adicionado un cero en red cerrada y un termino funci on de K
d
en el co-
eciente de s, lo que aumenta el amoriguamiento.
K
ev
= lm
s0
sG(s) = 2257,1K
p
; e
ssv
=
1
K
ev
= 0,000443/K
p
K
p
1
De la ecuacion caracteristica: =
361,2 + 815265K
d
2
_
815265K
p
Con K
p
= 1 y = 1, K
d
= 0,00177
Note que el cero de red cerrada en s =
K
p
K
d
, se acerca al origen si K
d
aumenta,
lo que aumenta el sobrepaso.
La ecuaci on caracterstica con K
d
como par ametro de variacion es:
1 +
815265K
d
s
s
2
+ 361,2s + 845265K
p
= 0
j884
j403
j403
j884
j
K
p
= 1
K
p
= 1/4
180 486 903
K
d
= 0.00177
K
p
= 1/4
K
p
= 1
K
d
= 0
K
d
= 0
= 0.2
K
d
Se observa el efecto amor-
tiguador de K
d
J. Ramrez y E. Rosero 96 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Respuesta temporal:
ms 4 8 12 18 24 28 32
0.4
0.8
1.0
1.2
1.6
Sin el PD
Con K
p
= 1, K
d
= 0.00177
Se cumplen las especicaciones dadas
SP = 4.2%
ts = 49ms
Para el ajuste por respuesta de frecuencia, K
p
desplaza la curva de Mdb hacia
arriba o abajo y T
d
corre la curva 20
db
dec
a la izquierda si aumenta o a la derecha si
disminuye.
T
d
T
d
20
dB
dec
K
p
1/T
d
La acci on P tiende a aumentar w
g
y el ancho de banda; mejora el M
G
, M
y la
M
PW
; puede amplicar ruido a altas frecuencias y es inecaz si la curva de fase
es muy pendiente en cercanas de w
g
, pues la r apida disminuci on del margen de
fase puede hacer que la fase adicionada por el controlador no sea suciente.
J. Ramrez y E. Rosero 97 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Ejemplo
Para el sistema del ejemplo anterior, se desea e
ssv
0,00443, M
80, M
PW
1,05, w
c
2000 rad/seg.
Curvas de respuesta de frecuencia, para diferentes K
d
:
20
0dB
20
MdB
K
d
= 0.00177
K
d
= 0.0025
K
d
= 0.0005
K
d
= 0
1000 10000 100 w
130
160
110
90
100 1000 10000
M = 22
K
d
= 0
K
d
= 0.0005
M = 82.9
o
K
d
= 0.00177
K
d
= 0.0025
El M
G
= para cualquier valor de k
d
; con k
d
= 0,00177, M
= 82,9
o
,
M
PW
= 1,025 y w
c
= 1669
Rad
Seg
cumpli endose los requisitos exigidos.
J. Ramrez y E. Rosero 98 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Para un ajuste por cancelacion polo-cero, con una planta de primer orden:
R
T
d
s+1
T
d
s+1
U
1
T
1
s+1
C
Con T
d
= T
1
1
T
d
s+1
R C
j
1
T
1
1
T
d
T
d
/T
d
10
U(t)
1
t
Se obtiene un sistema mas r apido, si no
se satura el actuador; para un escalon de
entrada, R(s) =
1
s
, el actuador debe ser
capaz de amplicar el salto inicial de sal-
ida del controlador; si se satura, el retardo
original se har a de nuevo efectivo; la re-
spuesta r apida continuara solo en peque na
se nal.
J. Ramrez y E. Rosero 99 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Para una planta de segundo orden:
R
+
K
p
(1+T
d
s)
1+T
d
s
K
s
(1+T
1
s)(1+T
2
s)
C
LGDR si se cancela T
2
: LGDR si se cancela T
1
:
j
1
T
1
1
T
2
1
T
d
K
2 j
1
T
1
1
T
2
1
T
d
K
1
K
2
= K
p2
K
s
para un adecuado. K
2
= K
p1
K
s
para un adecuado.
La elecci on adecuada es la que genere el mayor K
i
para lograr el menor e
ss
.
Asumiendo que despu es de la cancelacion, queda la planta con una constante T:
R
+
Kp
T
d
s+1
Ks
Ts+1
C
C
R
=
K
(T
d
s + 1)(Ts + 1) +K
; K = K
p
K
s
C
R
=
K/T
d
T
s
2
+
T
d
+T
T
d
T
s +
K+1
T
d
T
w
n
=
1 +K
T
d
T
; =
T
d
+T
2
_
T
d
T(1 +K)
T
2
_
T
d
(1 +K)
K =
T
4
2
T
d
1
Para tener la mayor K, T debe ser la m as grande: T = T
1
; luego debe cance-
larse T
d
= T
2
, la menor constante.
J. Ramrez y E. Rosero 100 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Para una planta de tercer orden:
G
p
(s) =
K
s
(1 +T
1
s)(1 +T
2
s)(1 +T
3
s)
; T
3
< T
2
< T
1
G(s) = G
c
(s)G
p
(s) =
K
p
K
s
(1 +T
d
s)
(1 +T
1
s)(1 +T
2
s)(1 +T
3
s)(1 +T
d
s)
Si se cancela la mayor constante: T
d
= T
1
j
1
T
1
1
T
2
1
T
d
K baja
1
T
3
T
d
para T
d
grande, puede estar cerca de T
2
y T
3
resultando baja K para el adecuado.
Si se cancela la menor: T
d
= T
3
j
1
T
1
1
T
2
1
T
1
T
3
Cancelado
Sin cancelar
Poco se gana pues el sistema sigue dominado
por las din amicas m as lentas.
J. Ramrez y E. Rosero 101 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
j
1
T
1
1
T
2
1
T
1
T
3
Se recomienda cancelar la constante de tiempo
intermedia; K
p
se obtiene para el adecuado de
los polos dominantes.
4.2.2. Dise no con el Controlador I
La funci on de transferencia del controlador Integral es:
G
c
(s) =
K
i
s
=
1
T
i
s
T
i
: Constante de tiempo Integral.
La acci on I elimina el error permanente de posiscion o el debido a perturba-
ciones constantes, tiene remanencia estacionaria, disminuye la velocidad de re-
spuesta y merma la estabilidad; por tanto su ajuste se hace en funcion de obtener
la mayor velocidad de respuesta con un amortiguamiento apropiado. Por tener un
solo par ametro, se puede ajustar f acilmente con el Lugar de la Races o la Re-
spuesta en Frecuencia.
Para una planta de primer orden:
R
+
1
T
i
s
K
s
Ts+1
C
se puede ajustar analticamente; la funcion de transferenciade red cerrada es:
C
R
=
1
T
ik
Ts
2
+T
ik
s + 1
, T
ik
= T
i
/K
s
w
n
= 1/
T
ik
T, =
1
2
_
T
ik
T
Tik = 4
2
T
J. Ramrez y E. Rosero 102 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Para = 1/
2, T
ik
= 2T, w
n
=
1
2T
Note que la constante de tiempo equivalente es
1
w
n
= 2T, luego el tiempo de
estabilizaci on en lazo cerrado pasa al doble del de lazo abierto.
La acci on I no se puede usar en plantas de alto orden con integracion y sin ceros
pues serian inestables. Con las plantas de mas alto orden sin integracion, se pueden
simplicar polos r apidos por la fuerte disminucion de la velocidad de respuesta
de la acci on Integral.
4.2.3. Dise no con el Controlador PI
La funci on de transferencia del controlador Proporcional Integral es:
G
c
(s) =
k
p
(1 +T
i
s)
T
i
s
Se adiciona un cero a la accion Integral, con ello se aumenta el tiempo de subida
y mejora el amortiguamiento; note que T
i
dene la ubicaci on del cero; por tener
dos par ametros se puede usar el contorno de las races para su ajuste.
Ejemplo
Ajustar el controlador PI para G(s) =
K
s
(s + 0,5)(s + 2)
GH(s) = GG
c
(s) =
K
s
K
p
(1 +T
i
s)
(s + 0,5)(s + 2)T
i
s
=
K(s + 1/T
i
)
s(s + 0,5)(s + 2)
K = K
p
K
s
.
Si T
i
, GH(s) =
K(s+1/T
i
)
s(s+0,5)(s+2)
; acci on Proporcional sola:
J. Ramrez y E. Rosero 103 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
j
0.5 2
LGDR del sistema sin compensar.
Si T
i
0, se adiciona la accion Integral; la ecuacion caracterstica es:
s(s + 0,5)(s + 2) +K(s + 1/T
i
) = 0
1 +
K/T
i
s[(s + 0,5)(s + 2) +K]
= 0
La nueva GH
(s) tiene tres polos, uno en el origen y dos en funcion de K.
j
0.5 2
T
i
0
Con K muy bajo, GH
tiene polos reales y el lugar despega del eje real, entre
0 y el polo que parte de -0.5; esto genera polos complejos con baja velocidad de
respuesta; si K es muy alto puede ser imposible ajustar T
i
para lograr un amor-
tiguamientoapropiado. Un adecuado para los polos de GH
(S) puede estar entre
1.8 y 0.8, lo que dene el valor de K; el amortiguamiento deseado para la red cer-
rada dene T
i
.
J. Ramrez y E. Rosero 104 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Para especicaciones en el tiempo en terminos de una ubicacion deseada de las
races, el LGDR permite f acilmente ajustar el controlador PI.
Ejemplo
Para G(s) =
1
(s+2)(s+0,5)
se desea SP 10 %, t
s
= 16/3seg
4
wn
=
16
3
w
n
= 0,75; para SP = 10 % = 0,6
w
n
= 0,75/0,6; w
d
= w
n
_
1
2
= 1; polos deseados en s
12
= 0,75 j
GH(s) =
K
p
(s + 1/T
i
)
s(s + 0,5)(s + 2)
basta ajustar el cero para que el lugar pase por
la raz deseada.
j
0.5
2
j
3/4
Ti
1
T
i
Criterio del angulo:
K
p
(s + 1/T
i
)
s(s + 0,5)(s + 2)
[
s=0,75+j
= 180,
Ti
= 89
o
cero en -0.75
1/T
i
= 0,75 T
i
= 4/3 seg.
K
p
ajusta con el criterio de magnitud:
[
Kp(s+0,75)
s(s+0,5)(S+2)
[
s=0,75+j
= 1 K
p
= 2,2
Con K
p
= 2,2 la tercera raz esta en s = 1; se debe vericar la respuesta en
el tiempo, pues el cero del PI tambien puede en red cerrada afectarla.
Para un ajuste por cancelacion polo-cero de una planta de primer orden, que-
da una integraci on en la red directa, lo que corresponde a un polo real en red
cerrada.
El ajuste del PI por cancelacion para una planta de segundo orden, tipo 0:
J. Ramrez y E. Rosero 105 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
R
+
K
p
(s+1/T
i
)
s
K
s
(s+1/T
1
)(s+1/T
2
)
C
Cual cancelar?
Cancelando una constante: GH
(s) =
k
s(s + 1/T)
C
R
=
k
s
2
+
1
T
s +K
2w
n
=
1
T
La constante no-cancelada debe ser la mas peque na para que la respuesta de red
cerrada sea r apida cancelar la constante de tiempo mayor.
Ejemplo
Para el ejemplo anterior GH(s)
1
(s+0,5)(s+2)
=
1
(0,5s+1)(2s+1)
, el polo m as lento es
el de 2 segundos.
1
T
i
= 0,5 T
i
= 2seg.
2w
n
=
1
0,5
; para = 1/
2 w
n
=
2 k
p
= w
2
n
= 2.
Para una planta de segundo orden tipo 1, no es posible realizar la cancelacion
pues lleva a un sistema marginalmente estable en red cerrada.
R
+
K
p
(s+1/T
i
)
s
1
s(s+1/T)
C
GH(s) =
Kp(s+1/T
i
)
Ts
2
(s+1/T)
; el sistema es estable si
1
T
i
<
1
T
T
i
> T
J. Ramrez y E. Rosero 106 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Mdb
-180
1/T
i 1/T
1/T
i 1/T
g
-40
-20
-40
M
El ajuste se puede hacer con
la respuesta de frecuencia por
la simetra de la curva.
Con w
g
en la media geometri-
ca del cero y el polo, el M
es m aximo.
w
g
= 1/
T
i
T
Evaluando el angulo de GH(s) en w
g
, se obtiene la relacion:
sen M =
T
i
T
T
i
+T
Especicando un M
d
apropiado, T
i
se ajusta:
T
i
=
(1 +sen M
d
)
1 sen M
d
de [ GH(w
g
) [= 1 se obtiene: K
p
=
1
T
i
T
; este dise no se denomina ajuste por
simetra optima.
A pesar de ser un sistema de tercer orden, por la simetra de GH(s), se puede
ajustar el PI analticamente en el dominio del tiempo:
C
R
=
K
p
T
(s + 1/T
i
)
s
3
+
1
T
s
2
+
Kp
T
s +
Kp
T
i
T
J. Ramrez y E. Rosero 107 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
con K
p
=
1
T
i
T
la ecuaci on caracterstica es:
s
3
+
s
2
T
+
K
p
T
s +K
3
p
= 0
Hay una raz en s = K
p
.
(s +K
p
)(s
2
+ (
1
T
K
p
. .
=
1
2
(
1
TKp
1)
)s + K
2
p
..
wn=Kp
) = 0
=
1
2
(
_
T
i
T
1); para = 1/
2: T
i
= (
2 + 1)
2
T 5,8T
K
p
=
1
T
i
T
=
1
T(
2 + 1)
1
2,4T
t
T
i
T
C(t)
-180
2 6 4
8 12 10
Con ltro
Sin ltro
La respuesta a un escalon uni-
tario en la referencia muestra
un sobrepaso elevado; usando
una compensaci on de preali-
mentaci on G
C2
(s) =
1
T
i
s + 1
se elimina.
Para plantas de tercer orden, tipo 0:
GH(S) =
k
p
(T
i
s + 1)
T
i
s(T
1
s + 1)(T
2
s + 1)(T
3
s + 1)
J. Ramrez y E. Rosero 108 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
1/T
2
1/T
1 1/T
3
jw
Es conveniente (al igual que para
sistemas de segundo orden) cance-
lar el polo m as lento; K
p
se ajusta
para el adecuado.
Si T
1
es mucho mayor que T
2
y T
3
, en un factor de 6: T
1
> 6T
2
, T
3
, el ajuste
T
i
= T, dar a respuestas transitorias muy lentas ante disturbios; el PI se puede
ajustar en este caso asumiendo el modo lento como una integracion: 1+T
i
s T
i
s,
despreciando el modo r apido T
3
0 y aplicando el ajuste por simetra optima.
4.2.4. Dise no con el Controlador PID
La funci on de transferencia del controlador Proporcional Integral Derivativo
paralelo es:
G
c
(s) =
K
p
(1 +T
1
s +T
1
T
2
s
2
)
T
1
s
; ceros: Z
12
=
1
2T
2
_
T
2
1
4T
1
T
2
La mayora de las veces T
1
> 4T
2
y los ceros son reales
G
c
(s) =
K
p
(1 +T
i
s)(1 +T
d
s)
T
i
s(1 +T
d
s)
, donde se ha adicionado la constante de tiem-
po T
d
por el retardo parasito de un controlador real; note que es un controlador PI
en cascada con un controlador PD.
La respuesta de frecuencia del controlador es:
J. Ramrez y E. Rosero 109 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Mdb
1/T
i 1/T
d
1/T
,
d
1/T
i
1/T
d
1/T
,
d
T
,
d
= 0
A baja frecuencia actua como PI
A alta frecuencia actua como PD
El PID se utiliza para plantas de tercer orden o mas; se estudiar a el ajuste para
plantas con 3 polos reales y con uno real y 2 complejos con bajo amortiguamien-
to; por la complejidad, la tecnica m as apropiada es la cancelacion.
1. GH(s) =
K
p
(T
i
s + 1)(T
d
s + 1)
T
i
s(T
d
s + 1)(T
1
s + 1)(T
2
s + 1)(T
3
s + 1)
; T
1
> T
2
> T
3
Los criterios de ajuste del PD y el PI se pueden aplicar en este caso; para el
PD: T
d
= T
2
GH
(s) =
K
p
(T
i
s + 1)
T
i
s(T
d
s + 1)(T
1
s + 1)(T
3
s + 1)
(PI para planta de tercer or-
den)
a) T
1
> T
3
, T
d
T
i
= T
1
GH
(s) =
K
p
/T
i
s(T
d
s + 1)(T
3
s + 1)
J. Ramrez y E. Rosero 110 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
1/T
2 1/T
1
1/T
3
1/T
,
d
K
p
jw
Con el LGDR, K
p
se ajus-
ta para el amortiguamiento
apropiado.
b) T
1
T
3
, T
d
1
T
1
s + 1
1
T
1
s
;
1
T
d
s + 1
1
1/T
2 1/T
1
1/T
3
1/T
i
jw
GH
(3)
(s) = k
p
(T
i
s + 1)
T
i
T
1
s
2
(T
3
s + 1)
T
i
= 5,8T
3
;
K
p
= T
1
/(2,4T
3
)
para obtener = 1/
2
Ejemplo
Ajustar un controlador PID para una planta con T
1
= 0,4 seg, T
2
= 0,2
y T
3
= 0,05 seg; T
d
= 0,1T
d
T
d
= T
2
= 0,2 T
d
= 0,02; como T
1
= 0,4 0,02; 0,05
con T
i
= 5,8T
3
, K
p
= T
1
/2,4T
3
= 1/
2
con T
i
= 4T
3
, K
p
= T
1
/2T
3
= 0,5
J. Ramrez y E. Rosero 111 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
t
C
R
0.5 1 1.5
= 0.5
= 0.7
= 0.7 con ltro
Respuesta a la referencia
t
C
D
0.5 1 1.5
= 0.5
= 0.7
Respuesta al disturbio
Sin regulacion
t
C
R
0.5 1 1.5
PID
PD
P
PI
I
Lazo abierto
Respuestas al escal on para
diferentes acciones de con-
trol, se ajustaron para M
45
o
. Ejercicio: ajustar P, PI, I
y PD para M = 45
o
2. G
p
(s) =
w
2
n
(s
2
+ 2w
n
s +w
2
n
)(T
1
s + 1)
0 1
Se desea la acci on I para obtener bajo error permanente.
Para estabilizar el sistema, se requieren al menos 2 ceros con adelanto de
fase PID.
Como 1 hay un pico de resonancia cerca de w
n
; se puede asumir
el caso m as difcil con = 0, lo que simplica el ajuste.
Para obtener alta velocidad de respuesta y amortiguamiento apropiado, w
g
debe estar bien por encima de w
n
; en rangos de w
g
, la parte oscilatoria se
puede aproximar por su asntota de alta frecuencia, simplicandose la planta
a: G
p
(s)
w
2
n
s
2
(T
1
s + 1)
.
GH(s)
=
K
p
w
2
n
T
i
s
3
T
i
s + 1
T
1
s + 1
T
d
s + 1
T
d
s + 1
J. Ramrez y E. Rosero 112 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
A baja frecuencia la fase es 270
o
por los tres integradores; si K
p
baja, el
sistema se hace inestable, luego se tiene un sistema condicionalmente es-
table.
Se puede realizar un ajuste por simetra optima buscando el maximo M
;
las frecuencias de avance de fase maximo, w
m
son:
si T
1
< T
d
si T
1
> T
d
PI
1/
T
i
T
1
1/
_
T
i
T
d
PD
1/
_
T
d
T
d
1/
T
d
T
1
Asumiendo T
1
< T
d
y haciendo w
mPI
= w
mPD
= w
g
, la fase es sim etrica
con respecto a w
g
, logr andose el M
m aximo.
w
1
Ti
1
Td
w
g
1
T
,
d
1
T1
PID
PI
PD
w
g
=
1
T
i
T
1
=
1
_
T
d
T
d
; sen
PI
=
T
i
T
1
T
i
+T
1
; sen
PD
=
T
d
T
d
T
d
+T
d
El margen de fase sera: M
=
PI
+
PD
90
o
con T
i
= 20T
1
PI
= 65
o
PD
= M
deseado
+ 25
o
Conocido T
i
y
PD
se calculan T
d
y T
d
resolviendo: sen
PD
=
T
d
T
d
T
d
+T
d
y T
d
T
d
= T
i
T
1
.
K
p
se ajusta para tener: [ GH(jw
g
) [= 1, con w
g
= w
m
= 1/
T
i
T
1
.
J. Ramrez y E. Rosero 113 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Deduciendo se obtiene:
K
p
=
_
T
d
w
2
n
T
i
T
1
T
d
La gura muestra la Respuesta de Frecuencia y la Respuesta en el Tiem-
po con = 0; se observa como se compensa la naturaleza oscilatoria de la
planta.
w
t seg
C(t)
w
n
1
Ti
1
Td
w
g
1
T
,
d
1
T1
2 4 6 8
-90
-180
-210
0
w
M db
t seg
C(t)
w
n
1
Ti
1
Td
w
g
1
T
,
d
1
T1
2 4 6 8
-20
-60 -60
-40
-40
M
4.2.5. Dise no para Plantas Sobreamortiguadas de Alto Orden
Se considera el sistema a controlar:
G(s) =
K
(1 +T
1
s)(1 +T
2
s)(1 +T
3
s)(.....
J. Ramrez y E. Rosero 114 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Para el dise no, se busca una reducci on de orden; desarrollando el denominador:
G(s) =
K
1 + (T
1
+T
2
+T
3
+....)s + (T
1
T
2
+T
1
T
3
+T
2
T
3
....)s
2
+....
Si existe acci on I la respuesta en red cerrada sera lenta y se pueden despreciar los
t erminos de orden superior:
G(s)
1
1 +T
e
s
; T
e
= T
1
+T
2
+T
3
+...
T
e
: constante de tiempo equivalente.
Si existe tiempo muerto: G(s) =
Ke
Tms
(1 +T
1
)(1 +T
2
) +...
expandiendo e
Tms
en series: e
TmS
= 1 +T
m
s +
(T
m
s)
2
2
+...
G(s) =
k
e
Tms
(1 +T
1
)(1 +T
2
)...
=
k
(1 +T
m
s)(1 +T
1
)(1 +T
2
)...
La constante de tiempo equivalente es: T
e
= T
m
+T
1
+T
2
+...
La aproximaci on es v alida si el controlador se disena de modo que w
g
< 1/T
e
;
normalmente esto se da si se usa la accion I. No se deben incluir en la equivalencia
constantes importantes cuyo valor sea mayor que la suma de las demas; por ejemp-
lo si T
1
> T
m
+T
2
+T
3
+... G(s)
=
k
(1 +T
1
s)(1 +T
e
s)
, T
e
= T
m
+T
2
+T
3
+...;
idem si hay 2 constantes importantes; de esta forma se llegara a sistemas reduci-
dos de 1
o
, 2
o
, 3er orden, los cuales se ajustan con los criterios vistos; T
d
tambi en
se pueden incluir en T
e
; como T
e
representa una dinamica equivalente y no fsica,
no se puede cancelar.
Ejercicios propuestos:
Para G(s) = 1/(s + 4)
2
, G(s) = 1/(0,05s + 1)s
2
y una planta sobreamortiguada
con constantes de tiempo: T
1
= 4, T
2
= 0,8, T
3
= 0,2, T
4
= 0,05, ajuste contro-
ladores adecuados para obtener un error permanente de posicion nulo, con SP, t
s
bajos.
4.2.6. Compensaci on Paralela
La arquitectura general de esta compensacion se presenta en la gura.
J. Ramrez y E. Rosero 115 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
R(s)
+
+
+
+
+
G
c
(s) G
1
(s)
G
2
(s)
G
R
(s)
D(s)
Y
2
(s)
C(s)
Y
1
(s)
La se nal de realimantacion principal se mezcla con la senal Y
2
(s) que se obtiene
de modicar dinamicamente a trav es de G
R
(s), la variable auxiliar Y
1
(s) de la
planta.
Como normalmente G
2
(s) es de atraso, entonces Y
1
(s) adelanta a C(s) y as al
realimentar Y
1
(s) se evitan grandes adelantos de fase en G
C
(s); como H(s) = 1,
una acci on integral en G
C
(s) la entrada a este controlador se forzara a cero en es-
tado estable con entradas al lazo constantes, entonces: e
ss
= lm
s0
s[R(s) C(s)
Y
2
(s)]; esto exige que Y
2
(s) = 0 para s = 0.
Podra pensarse en utilizar derivadores para calcular Y
1
(s) a partir de C(s); sin
embargo, la derivaci on repetida de se nales genera ruido, por lo que es preferible
sensar directamente las variables.
Ejemplo
Para el sistema de control de la exitacion, con excitatriz y dinamica apreciable
del actuador, dise nar el compensador en serie y la red estabilizadora G
R
(s); se
considera T
G
> T
E
> T
A
; se toma como variable auxiliar la tension de campo
del generador. El diagrama de bloques del sistema controlado es:
J. Ramrez y E. Rosero 116 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
V
r
(s)
+
+
+
G
c
(s)
1
(T
A
s+1)(T
E
s+1)
V
f
(s)
Y
2
(s)
G
R
(s)
V
t
(s)
1
T
G
s+1
1
(T
A
s+1)(T
E
s+1)(T
G
s+1)
V
r
+
G
C
(s)
1 +G
R
(s)(T
G
s + 1)
V
t
Para no disminuir la precision en estado estable:
Y
2ss
= 0 G
R
(s = 0) = 0 Derivacion
G
R
(s) debe ser de f acil dise no e implementacion y no debe amplicar armonicos
de Y
1
(s) esto exige tener polos en G
R
(s).
GH(s) =
G
C
s [(1 +G
R
(s)) (1 +T
G
s)]
[1 +T
G
s][1 +T
E
s][1 +T
A
s]
Cancelando el retardo intermedio con el adelanto de la realimentacion auxiliar:
(1 +G
R
(s))(1 +T
G
s) = 1 +T
E
s
G
R
(s) =
T
E
s
1 +T
G
s
G
C
(s) se puede escoger como un PI con T
I
= T
G
y K
P
para el deseado; n otese
que por el adelanto en G
R
(s) no se requiere acci on D en G
c
(s).
J. Ramrez y E. Rosero 117 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
V
r
+
T
E
s + 1
G
C
(s)
1
(T
G
s+1)(T
E
s+1)(T
A
s+1)
V
t
1
T
E
s+1
V
r
(s)
+
G
C
(s)
1
(T
G
s+1)(T
A
s+1)
V
t
(s)
4.2.7. Compensaci on Cascada
Esta estrategia de compensacion est a ampliamente difundida en la industria;
la gura muestra el diagrama de bloques de esta arquitectura de control para dos
lazos:
R(s)
+
G
C1
(s)
+
G
C2
(s)
G
eq
(s) G
1
(s) G
2
(s)
Y
1
(s)
C(s)
Se tiene una variable auxilir Y
1
(s) a medir; G
e
q(s) es la din amica del Actuador
o la din amica equivalente de otra bucla interna; veamos las principales ventajas y
desventajas de esta estructura de control.
Ventajas:
Subdivide una planta compleja para resolver el problema de control a pasos,
mediante controladores simples.
Los controladores estan menos sujetos a saturacion.
Se eliminan r apidamente los efectos de disturbios internos.
Se pueden limitar se nales intermedias importantes.
J. Ramrez y E. Rosero 118 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Localiza alinealidades.
El dise no y la implementacion se pueden realizar de forma sistematica por
lazos.
Desventajas:
Se requiere de un controlador y sensor por cada bucla.
Si las buclas tienen accion I la respuesta es m as lenta ante cambios en la
referencia que la de un sistema con una sola bucla.
Ejemplo
La gura muestra el diagrama de bloques para el sistema de control de la ex-
citaci on, con un control en cascada utilizando como variable auxiliar a la tension
de campo generador.
V
r
(s) +
G
ct
V
fr
(s)
+
1
(Tas+1)
1
(T
e
s+1)
1
(T
g
s+1)
V
f
G
cf
V
t
Ejercicio
Escoja y ajuste G
cf
y G
ct
para el ejemplo anterior.
Ejemplo
Consideremos un esquema de control cascada de tres lazos para una planta so-
breamortiguada.
Para seleccionar los controladores, es conveniente que por estandarizacion
sean todos del mismo tipo; en este caso Proporcionales Integrales; el ajuste se
realiza por pasos coomenzando por la bucla mas interna:
GH
3
(s) =
K
p3
(1 +T
i3
s)
T
i3
s(T
e4
s + 1)(T
3
s + 1)
J. Ramrez y E. Rosero 119 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
+
G
c2
+
1
(Te4s+1)
1
(T
3
s+1)
1
(T
2
s+1)
G
c3
R
1
+
G
c1
R
2 R
3
1
(T
2
s+1)
C
2 C
1
C
3
Dinamica equivalente del actuador u otra bucla
T
1
> T
2
> T
3
> T
e4
Con T
i3
= T
3
, tenemos:
C
3
R
3
=
K
p3
T
i3
T
e4
s
2
+T
i3
s +K
p3
donde: 2
n
=
1
T
e4
;
2
n
=
K
p3
T
i3
T
e4
; despejando K
p3
obtenemos:
K
p3
=
T
3
4
2
T
e4
(4.1)
con esta expresi on podemos ajustar K
p3
para el deseado.
La din amica simplicada del lazo es:
C
3
R
3
1
T
i3
K
p3
s + 1
La constante equivalente es: T
e3
=
T
i3
K
p3
, T
e3
= 4
2
T
e4
.
Para el segundo lazo, la funcion de transferencia de red abierta es:
GH
2
(s) =
K
p2
(1 +T
i2
s)
T
i2
s(T
e3
s + 1)(T
2
s + 1)
la cual tiene la misma forma de GH
3
(s); igual sucede con GH
1
(s); por tanto,
G
c2
(s) y G
c1
se ajustan de la misma forma que G
c3
(s); si se asigna el mismo
para todos los lazos, el procedimientoes recursivo, con escalamiento en el tiempo:
= 4
2
.
La constante de tiempo equivalente de todo el sistema de control, T
e
ser a T
e
=
3
T
e4
, as, para una respuesta total r apida, debe tenerse el menor retardo posible
en la bucla m as interna.
J. Ramrez y E. Rosero 120 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Es posible no utilizar el lazo interno 3, en cuyo caso G
c2
(s) puede ser un PI
que se ajusta con T
e3
= T
e4
+ T
3
; o bien, G
c2
(s) puede ser un PID que cancela
T
2
y T
3
con T
e3
= T
e4
+ T
,
d2
; en cualquier caso, G
c1
(s) ser a un PI ajustado de la
misma forma; el PID mejora la velocidad de respuesta a cambios en la referencia
y no cuesta m as que el PI, lo que permite reducir los costos de la bucla no imple-
mentada.
Si una bucla interna tiene una integracion:
GH(s) =
K
p
(1 +T
i
s)
T
i
Ts
2
(1 +T
e
s)
se ajusta por simetra optima: T
i
= (2 + 1)
2
T
e
; K
p
= 1/(2 + 1)T
e
.
Se usara un ltro en la referencia
1
T
i
s+1
y la din amica simplicada del lazo sera
C
R
=
1
T
i
s+1
, donde T
e1
= T
i
= a
2
T
e
con a = (2 + 1).
Es posible tambi en que el proceso a controlar no tenga una estructura en ca-
dena por las interacciones internas.
Y
2 +
G
1
(s)
G
2
(s)
Y
3
Y
1
G
3
(s)
En este caso, Y
2
es la variable auxiliar medida para la bucla interna; para obten-
er la estructura en cadena, basta aplicar el algebra de los diagramas de bloques:
Y
2 +
G
1
(s)
G
2
(s)
Y
3
Y
1
G
2
G
3
(s)
G
1
1G
1
G
2
G
3
J. Ramrez y E. Rosero 121 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Ejemplo
Se desea regular la velocidad w de un motor de CC, con posibilidad de limitar
la corriente de armadura i
a
para protecci on del motor; esto nos lleva a una arqui-
tectura de control cascada de las variables i
a
y w.
e
a
+
1
(Tas+1)
1
T
m
s
e
b
i
a
w
e
a
+
1
(Tas+1)
1
T
m
s
i
a
w
1
T
m
s
e
a
Tms
(TmTas
2
+Tms+1)
1
T
m
s
i
a
w
w
n
= 1/
T
m
T
a
; =
1
2
T
m
/T
a
Si T
m
< 4T
a
< 1; si T
m
> 4T
a
> 1, lo que es m as usual de
encontrara en la pr actica; asumiendo T
m
> 4T
a
, factorizando el denominador de
i
a
/e
a
y usando un PID para la bucla de corriente:
GH
I
(s) =
K
p2
(T
i2
s + 1)(T
d2
s + 1)
T
i2
s(T
,
d2
s + 1)
. .
PID
T
m
s
(T
1
s + 1)(T
2
s + 1)
. .
ia
ea
1
T
3
s + 1
. .
retardo equivalente del actuador
con T
1
> T
2
> T
3
> T
,
d
; ajustando T
i2
= T
1
, T
d2
= T
2
,
GH
I
(s) =
K
p2
T
m
/T
i2
(T
,
2d
s + 1)(T
3
s + 1)
K
p2
se ajusta para = 1/
2.
i
a
i
aref
=
K
p2
T
m
/T
i2
T
,
2d
T
3
s
2
+ (T
,
2d
+T
3
)s + 1
K
2
(T
eI
s + 1)
con K
2
=
K
p2
Tm
T
i2
y T
eI
= T
,
2d
+T
3
.
J. Ramrez y E. Rosero 122 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
w
r
+
K
,
2
T
eI
s+1
1
T
m
s
w
G
c1
El lazo de velocidad sera:
G
c1
(s) puede ser un PI ajustado por simetra optima:
GH
w
(s) =
K
p1
T
i1
T
m
K
2
(T
i1
s + 1)
s
2
(T
eI
s + 1)
Con T
i1
= (2 + 1)
2
T
eI
y K
p1
=
Tm
K
2
(2+1)T
eI
.
4.2.8. Compensaci on Directa
Compensaci on Directa de Disturbio en Red Abierta
Si en la planta el disturbio principal es medible y su punto de accion es cono-
cido, se puede usar la estrategia de control:
R(s)
G
1
(s)
R
D
+
G
D
(s)
G
2
(s)
D(s)
+
+
G
3
(s)
C(s)
N otese que hay una accion correctiva inmediata R
D
a partir de la perturbacion,
sin afectar la estabilidad pues no hay realimentacion.
C(s) = [G
1
(s)G
2
(s)G
3
(s)] R(s)
. .
C
R
+[1 G
D
(s)G
2
(s)G
3
(s)] D(s)
. .
C
D
Si G
D
(s) =
1
G
2
(s)
, entonces C
D
(s) = 0.
J. Ramrez y E. Rosero 123 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Como G
2
(s) es usualmente de atraso entonces G
D
(s) ser a de adelanto; recorde-
mos que la compensaci on durante el transitorio solo es efectiva si no hay satu-
raci on del actuador.
Ejemplo
El generador autorregulado autoexcitado se emplea bastante en pequenas cen-
trales de energa.
La autoexcitacion se da a trav es del transformador saturable TPS, se toma el
G
V
I
V
s
TPS
V
t
TI
V
f
+
Transformador
Saturable
+
-
+
-
voltaje generado, se rectica y se alimenta el campo con V
s
, lo que genera una
realimentaci on positiva; el nivel de saturacion se ajusta para que el TPS lleve la
tensi on desde la remanencia hasta la nominal; cuando hay corriente de carga en
el generador (perturbacion), la salida del TI recticada V
I
alimenta el campo del
generador, compensando la cada de tensi on en la reactancia interna del generador.
El siguiente diagrama de bloques describe este sistema.
V
I
1
(T
g
S+1)
V
t
+
0.15
I
V
f V
s
+
+
J. Ramrez y E. Rosero 124 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
La din amica equivalente entre perturbacion y salida para el generador es:
V t
0,15I
= [
1
T
g
s + 1
1] =
T
g
s
T
g
s + 1
;
La respuesta a un escalon unitario correspondiente de aplicar la carga nominal
I(s) = 1/s , se muestra en la gura, para distintos valores de la constante de
tiempo del generador.
Sin control directo
0.85
1.0
V
t
[PU]
T
g
N otese que el control directo es mas efectivo entre menor sea el retardo entre el
punto de ataque del disturbio y la senal de compensaci on.
Compensaci on Directa de Disturbio en Red Cerrada
El control directo de perturbaciones es de red abierta por lo que no compensa
los efectos de las variaciones parametricas y los demas disturbios. Podemos usarlo
como complemento a un lazo de compensacion serie:
R(s)
G
C
G
1
+
+
G
D
G
2
G
3
C(s)
D(s)
J. Ramrez y E. Rosero 125 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
La respuesta en la salida debida a la perturbacion es:
C
D
(s) =
[1 G
D
(s)G
2
(s)]G
3
(s)
1 +G
1
(s)G
2
(s)]G
3
(s)
D(s)
luego el criterio de ajuste para G
D
(s) es el mismo visto para el lazo abierto:
G
D
(s) =
1
G
2
(s)
La reducci on del efecto del disturbio de la realimentacion permite reducir la ganan-
cia de G
D
(s) o bien, quitar la accion Integral en G
C
mejorando la velocidad de
respuesta y el amortiguamiento.
Compensaci on Directa de la Referencia
En servomecanismos interesa mejorar el seguimiento de la entrada, por lo que
es usual utilizar una compensacion directa de la referencia:
R(s)
G
D
G
1
G
2
A C(s)
+
+
+
Con este esquema se disminuye el rango de la senal A(salida del controlador G
1
),
por lo que se puede reducir la ganancia de G
1
; tambi en se facilita el control man-
ual en caso de falla del controlador.
En servomecanismos de altas prestaciones con control de la 1
a
y 2
a
derivadas
de la referencia, se puede usar el control en cascada mas el control directo din ami-
co de la referencia.
El siguiente ejemplo nos ilustrara esta estrategia de control.
J. Ramrez y E. Rosero 126 GICI
4.2. DISE
NO DE SISTEMAS DE CONTROL AN
ALOGOS
Ejemplo
+
1
T3s+1
1
T
2
s
1
T
1
s
w
PI
w
x
+
1
Tg2s+1
PI
x
+
1
Tm1s+1
1
Tm2s
1
(Tg1s+1)
r
Modelo de referencia
K
+
Control directo de la
referencia de velocidad
con R(s) = 1/s: w
r
y x
r
: continuo
w
r
x
r
Los ltros con constantes de tiemo T
g1
y T
g2
eliminan los ceros de los PI de
posici on y velocidad; la entrada directa al lazo de velocidad de w
r
con ganancia
k, no esperael error dinamico en la bucla externa de posicion, aumentando la
velocidad de respuesta del sistema.
t
x
1
K = 0
Respuesta a un escal on x
r
(t)
sin el control directo.
t
1
x
r
x
K = 0
Respuesta a un escal on en r(t)
sin control directo; modelo de
referencia con = 1.
J. Ramrez y E. Rosero 127 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
t
x
r
x
K = 0
K = 0.5
T1
Tm2
K = 1.5
T1
Tm2
K =
T1
Tm2
Error din amico: x
r
x para
distintos valores de K; con
K = T
1
/T
m2
el error es de-
spreciable y la respuesta del
sistema es la del modelo de
referencia para cualquier r(t),
a un con cambios de paramet-
ros y perturbaciones de carga.
4.3. Dise no de Sistemas de Control Digitales
4.3.1. Dise no por Equivalente Discreto
En el dise no por equivalente discreto, se asume inicialmente que el sistema de
control es continuo y se disena el controlador analogo por cualquier tecnica cono-
cida; luego el controlador analogo se discretiza para obtener el controlador digital;
para el dise no del controlador analogo, se adiciona un retardo de primer orden que
tome en cuenta la dinamica del retenedor de orden cero ROC =
1e
Ts
s
; usando la
aproximaci on de Pad e de primer orden para el retardo: e
Ts
=
1Ts/2
1+Ts/2
, se obtiene:
ROC =
1
s
[1
2 Ts
2 +Ts
] =
2T
2 +Ts
Para no afectar la ganancia estatica, se aproxima:
ROC
1
T
2
s + 1
De esta forma se obtiene el sistema de tiempo continuo:
R(s) +
1
T
2
s+1
G
p
(s) G
c
(s)
J. Ramrez y E. Rosero 128 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
El sistema de control digital obtenido mediante este procedimiento sera:
R(z)
+
G
D
(z)
G
p
(z)
C(z)
Donde G
D
(s) es la discretizacion de G
C
(s) y G(z) = (1 z
1
)L
G
P
(s)
s
.
Para aplicar el metodo descrito, requerimos obtener equivalentes discretos
de funciones de transferencia continuas. Si G(s) no tiene retenedor de orden
cero, se puede discretizar mediante tecnicas de integracion num erica o de mapeo
polo-cero.
Discretizaci on por Integraci on Num erica
Las t ecnicas de integracion num erica, representan una funcion de transfe-
rencia:
C
R
= G(s) por una ecuaci on diferencial, la cual se integra mediante una
t ecnica num erica:
Euler(rectangular hacia adelante): s
z 1
T
:
dc
dt
[c(kT +T) c(kT)]
T
Rectangular atras: s
z 1
Tz
:
dc
dt
c(kT) c(kT T)
T
Trapezoidal o bilineal: s
2
T
z 1
z + 1
Cada aproximacion es un mapeo del plano s al plano z que aproxima: z = e
sT
J. Ramrez y E. Rosero 129 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
Rectangular adelante: z = 1 +Ts
Rectangular atras: z =
1
1 Ts
Bilineal: z =
1 +Ts/2
1 Ts/2
Plano z
Regi on de estabilidad
Ejemplo
Analicemos la discretizacion de la funci on de transferencia: G(s) =
a
s +a
Con la aproximaci on rectangular adelante: G
1
(z) =
a
z1
T
+a
Con rectangular atras: G
2
(z) =
a
z1
Tz
+a
Con la transformada bilineal: G
3
(z) =
a
2
T
z1
z+1
+a
; analicemos la respuesta en
frecuencia para G
3
(z), evaluando z = e
jw
:
G
3
(e
jw
) =
a
2
T
e
jwT/2
e
jwT/2
e
jwT/2
+e
jwT/2
+a
=
a
2
T
j tan
wT
2
+a
J. Ramrez y E. Rosero 130 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
Luego la relaci on entre las frecuencias continua w
con
y discreta w
dis
es:
w
con
=
2
T
tan
w
dis
T
2
Esta expresi on dene la distorsi on en frecuencia debida a la aproximacion bili-
neal; si la frecuencia de corte continua es a, la discreta ser a:
w
CD
=
2
T
tan
1
aT
2
Note que si w
dis
T es peque no, entonces w
con
w
dis
, esto es que hay baja distor-
si on; por el contrario, si w
dis
ws
2
, entonces w
con
, alta distorsi on.
Se puede ajustar la frecuencia del corte del ltro continuo, para que al aplicar
la transformada bilineal la frecuencia de corte discreta sea la deseada; a esto se
le denomina Prewarping o prealabeamiento; para G(s) =
a
s +a
, a se ajusta a:
a
2
T
tan
aT
2
, de forma que se tiene la funcion de transferencia continua:
G
(s) =
2/T tan aT/2
S +
2
T
tan aT/2
La cual al discretizarse da:
G
(z) =
tan aT/2
z1
z+1
+ tan aT/2
Noten que la frecuencia de corte del ltro digital es: w
cdis
=
2
T
tan
1
tan
aT
2
= a,
la deseada.
Discretizaci on por Mapeo Polo-Cero
En esta discretizacion se mapean los polos y ceros de G(s) mediante z = e
sT
y se ajusta la ganancia en una frecuencia especca; el m etodo tiene los siguientes
pasos:
1. Polos y ceros nitos de G(s) en s = a, se trasladan a polos o ceros en
z = e
aT
.
2. Si hay exceso de polos, los ceros innitos de G(s) van a alta frecuencia
w
s
/2 en el sistema discreto:
J. Ramrez y E. Rosero 131 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
z e
J
2
2T
T
= 1 z = 1: punto de mayor frecuencia, cumpliendo
el teorema de muestreo.
Tambi en se puede trasladar un cero innito de G(s) a z = para que
G(z) tenga un polo m as que un cero; esto garantiza que la expansion de
G(z) en series de z
1
no tenga t ermino constante y el controlador tendra al
menos un retardo unitario, disponible como tiempo de calculo.
3. Ajustar las ganancias de G(s) y G(z) en una frecuencia especca; la m as
usada es para el estado estable: s = 0 G(s) [
s=0
= G(z) [
z=1
Ejemplo
Obtengamos el equivalente discreto de G(s) =
a
s+a
por mapeo polo-cero.
1. Polo en s = a polo en z = e
aT
2. Cero innito cero en z = 1
G(z) =
k(z+1)
ze
aT
3. G(s = 0) = 1 = G(z = 1) =
2k
1 e
aT
k =
1 e
aT
2
G(z) =
(1 e
aT
)(z + 1)
2(z e
aT
)
Ejemplo
Para G(s) =
5
s+5
con a) f
s
= 3Hz y b) f
s
= 15Hz ver las respuestas de fre-
cuencia para los diferentes metodos.
Note que:
La regla rectangular adelante no aproxima bien para f
s
= 3Hz.
La transformada bilineal tiene un cero en z = 1 e
J2fT
= 1
2fT = f = f
s
/2: en la mitad de la f
s
.
J. Ramrez y E. Rosero 132 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
La transformada bilineal con predistorsion tiene el mismo ancho de banda
del sistema continuo.
Para f
s
= 15Hz las aproximaciones son adecuadas hasta la frecuencia de
ancho de banda: f
c
=
5
2
= 0,8.
Figura 4.1: Respuestas de frecuencia del ltro continuo G(s) =
5
s+5
vs diversos
ltros aproximados para frecuencias de muestreo de 3 y 15Hz.
J. Ramrez y E. Rosero 133 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
Ejemplo:
Discretizaci on de un ltro Butterworth de 4
o
orden; la funci on de transferen-
cia de este ltro es:
G(s) =
1
(
s
2
w
2
c
+ 2 cos /8
s
wc
+ 1)(
s
2
w
2
c
+ 2 cos 3/8
s
wc
+ 1)
, Tw
c
= 1, w
s
= 2w
c
La gura muestra varias respuestas al escalon de ltros Butterworth de distinto
orden.
0 5 10 15
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Respuesta al escalon
Tiempo (sec)
A
m
p
l
i
t
u
d
n = 8 n = 4
n = 2
Figura 4.2: Respuesta al escal on de ltros de distinto orden Butterworth.
Discretiz andolo por mapeo polo-cero se obtiene:
G(z) =
k(z + 1)
3
(z
2
0,736z + 0,157)(z
2
0,82z + 0,46)
Donde k es tal que G(z = 1) = 1; la gura muestra los mapas de polos y ceros
de los ltros en los planos s y z:
J. Ramrez y E. Rosero 134 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
Plano s
=
Plano z
La gura muestra la respuesta al escalon del ltro discreto.
0 2 4 6 8 10 12 14 16
0
0.2
0.4
0.6
0.8
1
Step Response
Time (sec)
A
m
p
lit
u
d
e
Figura 4.3: Respuesta al escal on de un ltro Butterworth discreto de 4to orden.
Habiendo revisado diferentes tecnicas de discretizacion de sistemas continuos,
volvamos al dise no por esta va, lo que se ilustra en el siguiente ejemplo.
Ejemplo
J. Ramrez y E. Rosero 135 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
Para el sistema G
p
(s) =
1
s(s + 2)
, discretizar G
D
(z) para que el sistema en red
cerrada sea dominado por un par de polos complejos con = 0,5 y un t
s
2 seg
(criterio del 2 %).
Para
4
w
n
= 2, se tiene: w
n
= 2, con = 0,5 tenemos w
n
= 4 rad/seg;
w
d
= 4
_
1
1
4
= 2
3
polos en s
12
= 2 j2
3
Perodo de la oscilacion amortiguada= 2/w
d
= 1,81 seg; para tener unos nueve
muestreos por ciclo de oscilacion: T = 0,2 seg.
G
ROC
=
1
T
2
s + 1
=
1
0,1s + 1
=
10
s + 10
El sistema a dise nar en tiempo continuo es:
R(s) +
10
s+10
1
s(s+2)
G
c
(s)
C(s)
G
c
(s) se puede dise nar con un cero que cancele el polo en s = 2, un polo
y una ganancia ajustados de tal forma que se cumplan los criterios de angulo y
magnitud en s
12
= 2 j2
3
G
c
(s) = 20,25(
s + 2
s + 6,66
)
C(s)
R(s)
=
202,5
(s + 2 +j2
3)(s + 2 j2
2) (s + 12,66)
. .
polo despreciable
Discretizando G
c
(s) con mapeo polo-cero:
Polo en s = 6,66 z = e
6,66T
= 0,2644
Cero en s = 2 z = e
2T
= 0,6703
J. Ramrez y E. Rosero 136 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
G
D
(z) = k(
z 0,6703
z 0,2644
)
En estado estable: G
C
(0) = G
D
(1) k = 13,57
G(z) = z
1e
0,2S
s
1
s(s+2)
=
0,0175(z + 0,876)
(z 1)(z 0,6703)
G
D
(z)G(z) = 0,2385
(1 + 0,876z
1
)z
1
(1 0,2644z
1
)(1 z
1
)
se cancela el polo en z =
0,6703
C(z)
R(z)
=
0,2385z
1
+ 0,2089z
2
(1 1,0259z
1
+ 0,4733z
2
)
Polos en : r =
0,4733 = 0,69
cos =
1,0259
2 0,69
= 0,7456 rad = 41,8
o
De r = e
/
1
2
y = w
n
T
_
1
2
, se obtiene: = 0,453, w
n
= 4,092,
valores muy cercanos a los esperados. La respuesta al escalon se muestra en la
gura siguiente; se observa una buena aproximacion entre la respuesta del sis-
tema continuo y el digital.
4.3.2. Dise no con el Lugar de las Races
Todos los criterios vistos para el diseno por el lugar de las races en tiempo
continuo aplican para los sistemas de tiempo discreto; ilustraremos esto mediante
un ejemplo.
Ejemplo
Dise nar el sistema del ejemplo anterior por el lugar de las races.
t
s
= 2seg; = 0,5 w
n
= 4; w
d
= w
n
_
1
2
= 3,46
w
s
=
2
T
= 31,42;
ws
w
d
9 (muestreos por ciclo de la oscilacion amortiguada)
J. Ramrez y E. Rosero 137 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
0 0.5 1 1.5 2 2.5 3 3.5 4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Respuesta al escalon
A
m
p
l
i
t
u
d
Tiempo (sec)
Respuesta del sistema de control anlogo
Respuesta del sistema de control digital
diseado mediante equivalente discreto
SP = 19%
SP = 16.5%
T
s
= 2.0s
Figura 4.4: Respuestas del sistema de control analogo y del sistema de control
digital dise nado mediante equivalente discreto.
R(s) +
1e
Ts
s
1
s(s+2)
G
D
(z)
T = 0.2
C(z)
Polos deseados en z:
r =[ z [= e
wnT
= 0,67; = Tw
d
= 0,69 rad P = 0,515 +j0,428
La funci on de transferencia discreta a controlar es:
G(z) = z
1 e
Ts
s
2
(s + 2)
=
0,0175(z + 0,876)
(z 1)(z 0,67)
AngG(z)
z=P
= 231,26
o
se requiere adicionar 51.26
o
para cumplir el cri-
terio del angulo.
J. Ramrez y E. Rosero 138 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
Asumiendo un controlador de la forma: G
D
(z) = k
z +
z +
y cancelando el po-
lo en z = 0,67 obtenemos: = 0,67; se calcula para aportar el avance de fase
deseado:
Ang
z + 0,876
(z 1)(z +)
[
z=0,51+j0,43
= 17,1 138,56 tan
1
0,482
+ 0,51
= 180
= 0,254 G
D
(z) = k
z0,67
z0,254
G
D
G(z) = k
0,017(z + 0,876)
(z 0,254)(z 1)
Del criterio de magnitud:
[ G
D
(z)G
(
z) [
z=0,515+j0,428
= 1 k = 12,67
Luego G
D
(z) = 12,67
z0,67
z0,254
.
Por equivalente discreto se obtuvo: G
D
(z) = 13,57
z0,67
z0,264
, ligeramente distin-
tos pues en el dise no por el lugar de las races no hay aproximacion del retenedor
de orden cero. La funcion de transferencia de red cerrada es:
C(z)
R(z)
=
0,222z + 0,195
z
2
1,031z + 0,449
, tiene un cero en z = 0,876 y polos comple-
jos dominantes. La gura muestra la respuesta al escalon del sistema dise nado.
J. Ramrez y E. Rosero 139 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
0 0.5 1 1.5 2 2.5 3 3.5 4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Respuesta al escalon
Tiempo (sec)
A
m
p
l
i
t
u
d
SP = 16%
T
s
= 2.0s
Figura 4.5: Respuesta del sistema, dise nado mediante el lugar de las races.
4.3.3. Dise no por Respuesta de Frecuencia
De nuevo ilustramos este caso con un ejemplo.
Ejemplo
Para el sistema analizado en respuesta de frecuencia:
R(s) +
1e
Ts
s
1
s(s+1)
G
D
(z)
T = 0.2
C(z)
Se desea dise nar G
D
(z) en el plano w para un M
= 50
o
, M
G
10db, con
una constante de error de velocidad: K
ev
= 2.
Se obtuvo en el ejemplo de analisis por respuesta de frecuencia discreta:
J. Ramrez y E. Rosero 140 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
G(z) = z
1e
Ts
s
2
(s+1)
z=
1+0, 1w
10,1w
= G(w)
G(w) =
(1+
w
300,6
)(1
w
10
)
w(1+
w
0,997
)
Asumiendo un controlador de la forma: G
D
(w) = k
1+w/
1+w/
K
ev
= lm
w0
wG
D
(w)G(w) = k = 2; la gr aca azul a trazos muestra la re-
spuesta de frecuencia de 2.G(w); el M
G
= 15,5db y el M
= 30
o
; cance-
lando con el cero del controlador, el polo en 0,997, la nueva frecuencia de cruce
por cero es de 2 rad/seg; en esta frecuencia, la fase de G(j2) = 162
o
; se
deben adicionar 32
o
en v = 2, para lograr el M = 50
o
; esto se logra con:
arctan
2
0,997
arctan
2
= 32
o
= 3,27
G
D
(w) = 2
1+
w
0,997
1+
w
3,27
; en rojo se muestra la respuesta de frecuencia del sistema
compensado; del diagrama: M
= 51,7 M
G
= 14,3db.
Para obtener el controlador en el plano z: w =
2
T
z1
z+1
= 10
z1
z+1
G
D
(z) = 2
1 +
1
0,997
[10(
z1
z+1
)]
1 +
1
3,27
[10(
z1
z+1
)]
= 5,43
z 0,818
z 0,507
G
D
(z)G(z) = 0,108
z+0,935
(z1)(z0,507)
el M
G
= 14,3db y el M
= 51,7
o
, pr actica-
mente iguales a los dwl plano w.
C(z)
R(z)
=
0,1018(z + 0,935)
(z 0,702 +j0,329)(z 0,702 j0,329)
(cero despreciable)
Los polos tienen = 0,5 y = 25,15
o
360
25,15
= 14,3 muestreos por ciclo.
El dise no cumple los requerimientos; notese que la regla de aproximacion
=
M
/100 se cumple: no sera as si la frecuencia de muestreo fuera muy baja. La
gura siguiente muestra las respuestas de frecuencia del sistema compensado y
sin compensar, en el plano w.
J. Ramrez y E. Rosero 141 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
10
2
10
1
10
0
10
1
10
2
10
3
90
135
180
225
270
F
a
s
e
(
d
e
g
)
80
60
40
20
0
20
40
60
M
a
g
n
i
t
u
d
(
d
B
)
Diagrama de Bode
Frecuencia (rad/sec)
14dB
14.5dB
G
D
(jv)G(jv)
G(jv)
50
30
Figura 4.6: Dise no por respuesta en frecuencia: sistema compensado, sistema
a compensar
4.3.4. El Controlador RST
La estructura can onica RST se muestra en la gura.
r(z)
T(z)
1
S(z)
ROC
R(z)
y(z)
T
u(z)
+
G(z) =
B(z)
A(z)
+
d(z)
+
b(z)
c(z)
Gp(s)
Disturbio del proceso
Ruido de medicion
Figura 4.7: Lazo de control con controlador RST
J. Ramrez y E. Rosero 142 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
La planta discreta a controlar se asume con polinomios B(z) y A(z) para el
numerador y el denominador; A, B, R, S, T son todos polinomios en z
1
; esta
arquitectura permite explotar al maximo la exibilidad de programacion de los
controladores digitales, para un buen diseno robusto que cumpla las especica-
ciones de respuesta.
La ley de control que implementa es:
u(z) =
R(z)
S(z)
y(z) +
T(z)
S(z)
r(z)
Las funciones de transferencia de red abierta G
RA
(z) y red cerrada G
RC
(z) son:
G
RA
(z) =
B(z)R(z)
A(z)S(z)
; G
RC
(z) =
B(z)T(z)
A(z)S(z) +B(z)R(z)
;
donde:
P(z) = A(z)S(z) +B(z)R(z) = 1 +p
1
z
1
+p
2
z
2
+...
es la ecuaci on caracterstica del lazo que dene los polos de red cerrada; en el
procedimiento de diseno se especicara de forma que se cumplan las especica-
ciones deseadas para la respuesta transitoria en la regulacion de perturbaciones.
Para asegurar esta dinamica, se escoger an apropiadamente los polinomios R(z)
y S(z); el polinomio T(z) introduce un grado de libertad adicional que permite
cumplir ciertas especicaciones para el seguimiento de la referencia r(z).
Funciones de Sensibilidad con el RST
En general, los polinomios RST se seleccionan para obtener funciones de
transferencia apropiadas:
c(z)
r(z)
,
c(z)
d(z)
,
c(z)
b(z)
,
u(z)
d(z)
que cumplan con los requerimientos de desempeno exigidos para cada una de
ellas, a saber:
c(z)
r(z)
= G
RC
(z): dene la din amica de regulacion del lazo.
J. Ramrez y E. Rosero 143 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
c(z)
d(z)
= S
cd
=
1
1 +G
RA
(z)
=
A(z)S(z)
P(z)
, es la funci on de sensibilidad
perturbaci on-salida, ella permite especicar partes de S(z) para rechazar
perturbaciones en ciertas frecuencias, por ejemplo, para eliminar el error
permanente debido a disturbios constantes, debe haber un cero en S
cd
en la
frecuencia nula: z = e
0
= 1, si el factor (1 z
1
) no existe en el proceso
A(z), debe existir en el polinomio S(z), lo que equivale a tener accion inte-
gral en el controlador RST. Recuerdese tambi en que el Margen de M odulo
es el inverso del m aximo de esta funci on: M
M
=
1
|S
cd
|max
; para un margen
de m odulo especicado M
M
0,5 se requiere [S
cd
[
max
2. En general
para no amplicar la perturbacion, se especica [S
cd
(jw)[ 2 w.
c(z)
b(z)
= S
cb
=
B(z)R(z)
P(z)
, es la funci on de sensibilidad ruido- salida. Permite
especicar partes de R(z) para eliminar el efecto del ruido de medida b(z)
sobre la salida.
u(z)
d(z)
= S
ud
=
A(z)R(z)
P(z)
, funci on de sensibilidad perturbacion- entrada,
muestra la inuencia de la perturbacion sobre la entrada al proceso; permite
especicar partes de R(z) para que el controlador no responda en ciertas
bandas de frecuencia para evitar, por ejemplo, la saturacion del actuador.
An alisis de Robust ez con el RST
Estas funciones tambien permiten analizar la robustez del control a las incer-
titudes y/o variaciones del proceso; consideremos los lugares de Nyquist para el
modelo nominal G
RA
y el sistema real G
RA
,
En general, el lugar de Nyquist nominal se encuentra en el interior de un
tubo que corresponde a las variaciones aceptables de la funcion de transferen-
cia del proceso. Para asegurar la estabilidad de lazo cerrado con G
RA
teniendo el
mismo n umero de polos inestables de G
RA
, es suciente que la diferencia entre
G
RA
y G
RA
sea menor que la distancia de G
RA
al punto crtico:
[G
RA
G
RA
[ < [1 +G
RA
[ w [0, ]
[G
RA
G
RA
[ < [S
1
cd
[ =
P(z)
A(z)S(z)
z=e
jw
(4.2)
J. Ramrez y E. Rosero 144 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
ImG
RA
w =
ReG
RA
-1
G
RA
G
RA
G
RAnominal
G
RAreal
1 +G
RA
Figura 4.8: Diagrama de Nyquist
donde S(z) y R(z) se calculan para obtener el P(z) = AS+BRdeseado, usando
los valores nominales de A(z) y B(z).
Por tanto, [S
1
cd
(e
jw
)[ da una condici on suciente de estabilidad para G
RA
; es
la m axima magnitud de la diferencia tolerada entre G
RA
y G
RA
. Esta tolerancia
es grande a baja frecuencia ya que [S
1
cd
[ = [1 + G
RA
[ es alta a baja frecuencia
por ser G
RA
de gran magnitud por la accion Integral. La tolerancia es mnima en
la frecuencia del M
M
, se debe por tanto, vericar que en las frecuencias del M
M
,
las variaciones del proceso sean compatibles con el M
M
obtenido; en caso con-
trario, o se mejora el conocimiento del modelo o se modican las especicaciones
(P(z)) para asegurar la estabilidad.
La condici on de robust ez (ecuaci on 4.2) se da en funci on de G
RA
= Gc(z).G(z):
controlador y proceso. Es importante expresarla solo en t erminos de G(z) =
B(z)/A(z):
[G
RA
G
RA
[ =
R
A
S
BR
AS
R
S
B
A
<
P
AS
J. Ramrez y E. Rosero 145 GICI
4.3. DISE
NO DE SISTEMAS DE CONTROL DIGITALES
B
A
<
P
AR
= [S
1
ud
[
La curva de M
db
(S
ud
) da las condiciones sucientes de la tolerancia permi-
tida sobre las variaciones del proceso G(z), esta tolerancia depende de la relacion:
P
A
donde P son los polos de red cerrada y A los polos del proceso; en decibeles
suponiendo el polinomio T(z) = 1, esto es:
P
A
db
=
B
A.B/P
db
=
B
A
db
B
P
db
= M
dbRA
M
dbRC
Tpicamente se tiene:
w
Mdb
/
B
A
/
/
B
P
/
/
P
A
/ < 0
RA
RC
Figura 4.9: Resuestas en frecuencia de red abierta y cerrada
Para frecuencias mayores al ancho de banda del proceso, [
P
A
[ se hace m as ne-
gativa y menor sera la tolerancia a las incertitudes parametricas; entre mayor sea
la diferencia de ancho de banda de red cerrada con relacion a red abierta, menor
tolerancia habra a las incertitudes del proceso. Por lo tanto, para una reduccion
importante de la velocidad de respuesta en red cerrada con relacion a la de red
abierta, se requiere de un buen modelo del proceso, en particular en las zonas de
frecuencia donde [S
1
cd
(z)[ es peque na.
Ejemplo
J. Ramrez y E. Rosero 146 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
Consideremos esta funci on de transferencia de red abierta: G(z) =
z
1
1 0,8z
1
y
las ecuaciones caractersticas de red cerrada: P
1
(z) = 1 0,6z
1
y la m as r apida,
P
2
(z) = 1 0,4z
1
. La gura muestra la respuesta de frecuencia de S
ud
para
ambos polinomios P(z).
Mdb
f
f
s
Sud para P
2
Sud para P
1
Figura 4.10: Diagrama de M
db
para S
ud
.
Como [S
1
ud
[
p
2
< [S
1
ud
[
p
1
, se requieren menores variaciones parametricas en el
proceso para obtener P
1
(z) en red cerrada.
4.4. Dise no por Asignaci on de Polos (Sntesis)
4.4.1. Controlador PID
Consideremos un controlador PID en la forma posicional:
G
c
(s) = Kp[1 +
1
T
i
s
+
T
d
s
1 +
T
d
N
s
]
Discretizando con s (1 z
1
)/T:
C
D
(z) =
R(z)
S(z)
=
r
0
+r
1
z
1
+r
2
z
2
(1 z
1
)(1 +s
1
z
1
)
S(z) tiene in integrador y un polo simple; hay cuatro parametros:
s
1
= T
d
/(T
d
+NT)
J. Ramrez y E. Rosero 147 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
r
0
= Kp(1 +
T
T
i
Ns
1
)
r
1
= Kp[s
1
(1 +
T
T
i
+ 2N) 1]
r
2
= Kps
1
(1 +N)
La gura muestra como el controlador PID es un caso particular del contro-
lador RST, para T = R.
+
R/S B/A
c(t)
u(t)
r(t)
r(t)
T = R
+
1/S
R
B/A
u(t)
c(t)
Procede
Proceso
Figura 4.11: Controladores PID y RST
La funci on de transferencia de red cerrada es:
G
RC
=
T.
B
SA
1 +
RB
SA
=
RB
SA+RB
Donde:
J. Ramrez y E. Rosero 148 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
P = SA+RB: Polos deseados de red cerrada.
RB: ceros de red cerrada.
Si P no tiene como factor a B, no hay cancelaci on polo-cero en red cerrada;
en tal caso, el controlador se puede usar con ceros del proceso B inestables; los
ceros inestables son frecuentes en los sistemas discretos, por ejemplo, un sistema
de primer orden con tiempo muerto T
m
, tiene un cero inestable al discretizarse
con un perodo de muestreo T < 2T
m
.
Note que se requiere 0 [s
1
[ 1 para que el ltro 1/(1 + s
1
z
1
) ten-
ga un equivalente continuo de primer orden: 1/(1 +
T
d
N
s), por lo tanto, pueden
obtenerse PID discretos sin tener un equivalente PID continuo, por ejemplo, si
1 < [s
1
[ < 0.
A parte de tener los ceros B del proceso en red cerrada, el controlador adiciona
los ceros de R; estos ceros dependen de A, B y P y por lo tanto no se denen de
antemano; los ceros de R pueden causar aumento del sobrepaso.
En lo que sigue, se consideraran sistemas de primer o segundo orden con tiem-
po muerto T
m
< T:
G
p
(s) =
e
sTm
T
p
s + 1
G
p
(s) =
w
2
n
e
sTm
s
2
+a
1
z
1
+a
2
z
2
con T < T
p
, tal que se tengan al menos 4 muestreos durante el tiempo de esta-
bilizaci on. La discretizacion de estas plantas de primer o segundo orden, llevan
a:
G(z) =
B(z)
A(z)
=
b
1
z
1
+b
2
z
2
1 +a
1
z
1
+a
2
z
2
(4.3)
Las especicaciones de desempe no se imponen en la funci on de transferencia de
red cerrada: G
RC
(z) =
BR
P
, as:
B y R : No se especican a priori
P = 1+p
1
z
1
+p
2
z
2
: se escogen p
1
y p
2
para obtener un y
n
adecuados
en red cerrada.
J. Ramrez y E. Rosero 149 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
El perodo de muestreo se puede denir bajo el criterio de tener una frecuencia
de muestreo entre 6 y 25 veces la frecuencia del ancho de banda en red cerrada
f
RC
:
1
T
= (6 25)f
RC
Para en el rango: 0,7 1, se tiene:
0,25
n
T 1,5 (4.4)
Para el c alculo de los par ametros del controlador, se debe resolver P =
AS +BR, conocidos los p
i
, a
i
, b
i
para calcular los r
i
y s
1
; esto se logra igualando
los coecientes de los polinomios P y (AS +BR):
P(z
1
) = 1 +p
1
z
1
+p
2
z
2
= A(z
1
)S(z
1
) +B(z
1
)R(z
1
)
= (1+a
1
z
1
+a
2
z
2
)(1z
1
)(1+s
1
z
1
)+(b
1
z
1
+b
2
z
2
)(r
0
+r
1
z
1
+r
2
z
2
)
p
1
= b
1
r
0
+s
1
+a
1
1
p
2
= b
2
r
0
+b
1
r
1
+s
1
(a
1
1) +a
2
a
1
0 = b
2
r
1
+b
1
r
2
+s
1
(a
2
a
1
) a
2
0 = b
2
r
2
a
2
s
1
Sea D = (a
1
1)b
1
b
2
2
b
3
2
[a
2
a
1
]b
2
1
b
2
a
2
b
3
1
; D ,= 0 si A y B son pri-
mos entre s, entonces:
r
0
=
1
D
[p
1
(a
1
1) p
2
+a
1
1 a
2
1
+a
2
]b
2
2
+a
2
(a
1
1 p
1
)b
2
1
+ [p
1
(a
1
a
2
) +a
1
a
2
1
+a
1
a
2
]b
1
b
2
r
1
=
1
D
[p
2
(a
1
a
2
) +p
1
a
2
+ (a
1
a
2
)
2
]b
1
b
2
r
2
=
1
D
[a
2
(a
1
+p
2
a
2
)]b
1
b
2
+ [a
2
(a
1
p
1
1)]b
2
1
a
2
2
b
2
0
s
1
=
1
D
[(p
2
+a
1
a
2
)b
0
b
2
1
(1 +p
1
a
1
)b
3
1
+ a
2
b
2
0
b
1
]
Ejemplo
Para G
p
(s) =
e
3s
10s + 1
, se desea un sobrepaso SP < 10 %, din amica de red
J. Ramrez y E. Rosero 150 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
cerrada con = 0,8 y w
n
= 0,05.
Escogiendo
n
T = 1/4, de (ecuaci on 4.4) se tiene: 3 < T < 10; escogemos
T = 5.
Para T = 5, T
p
= 10, T
m
= 3, G(z) es:
B(z
1
) = 0,1813z
1
+ 0,2122z
2
A(z
1
) = 1 0,6065z
1
Resolviendo las ecuaciones se obtiene el controlador RST:
R(z
1
) = 0,0621 + 0,0681z
1
S(z
1
) = (1 z
1
)(1 0,0238z
1
)
T(z
1
) = R(z
1
)
El cual tiene los Margenes de estabilidad:
Margen de ganancia: 7.712 ( 2)
Margen de Fase: 67.2 grados (> 30 grados)
Margen de m odulo: 0.7551 (2,49dB 0,5)
Margen de retardo: 45.4 s (> T)
Existe un PID continuo con:
K
p
=
r
0
s
1
r
1
(2 +s
1
)r
2
(1 +s
1
)
2
(4.5)
T
i
= T
K
p
(1 +s
1
)
r
o
+r
1
+ r
2
(4.6)
T
d
N
=
s
1
T
1 +s
1
(4.7)
T
d
= T
s
2
1
r
0
s
1
r
1
+r
2
K
p
(1 +s
1
)
3
(4.8)
de donde:
J. Ramrez y E. Rosero 151 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
Kp=-0.073, T
i
= 2,735, T
d
= 0,122, T
d
/N = 0,122
La gura muestra la respuesta del sistema y la senal de control para un escalon
de entrada.
0 10 20 30 40 50 60 70 80 90 100
0
0.2
0.4
0.6
0.8
1
U
(
t
)
0 10 20 30 40 50 60 70 80 90 100
0
0.2
0.4
0.6
0.8
1
Tiempo [s]
C
(
t
)
Respuesta al escaln filtrada, respuesta mas lenta
en red cerrada que en red abierta
Figura 4.12: Respuesta al escal on, controlador PID con w
n
= 0,05 rad/s.
Se observa que la se nal de control tiene una respuesta al escalon ltrada, esto
J. Ramrez y E. Rosero 152 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
hace que la respuesta en red cerrada sea mas lenta que en red abierta. Esto muestra
porqu e los PID continuos en procesos con T
m
>
1
5
T
p
merman la velocidad de
respuesta en red cerrada.
El PID digital puede lograr una respuesta mas r apida, como se ilustra en el
siguiente ejemplo.
Ejemplo
Consideremos una
n
= 0,1, el doble de velocidad del caso anterior, con el mismo
proceso:
Para T
p
= 10, T
m
= 3
B(z
1
) = 0,1813z
1
+ 0,2122z
2
A(z
1
) = 1 0,6065z
1
Especicaciones: T = 5,
0
= 0,1, = 0,8.
El controlador es:
R(z
1
) = 0,8954 0,4671z
1
, r
1
es negativo, el cero es positivo y esta en
z = 0,502, m as cerca a z = 1, luego aumenta el sobrepaso.
S(z
1
) = (1 z
1
)(1 + 0,16343z
1
), no hay equivalente PID continuo!
pues s
1
= 0,1634 > 0
T(z
1
) = R(z
1
)
M argenes de estabilidad:
Margen de ganancia: 6.046
Margen de Fase: 65.9 grados
Margen de m odulo: 0.759 (2,39dB)
Margen de retardo: 16.8 s
La gura muestra las se nales de respuesta al escalon de referencia, donde se
aprecia el aumento del sobrepaso.
Ejemplo
J. Ramrez y E. Rosero 153 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
0 10 20 30 40 50 60 70 80 90 100
0
0.2
0.4
0.6
0.8
1
C
(
t
)
0 10 20 30 40 50 60 70 80 90 100
0
0.2
0.4
0.6
0.8
1
tiempo (s)
u
(
t
)
Aumenta el sobrepaso
Figura 4.13: Desempe no del regulador numerico PID, w
n
= 0,1 rad/s
Consideremos ahora:
n
= 0,15rad/seg para el mismo proceso.
Especicaciones: T=5,
0
= 0,15, = 0,8.
El controlador es:
R(z
1
) = 1,6874 0,8924z
1
, cero en 0.53, mayor sobrepaso.
J. Ramrez y E. Rosero 154 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
S(z
1
) = (1 z
1
)(1 + 0,3122z
1
), no hay equivalente PID continuo.
T(z
1
) = R(z
1
)
M argenes de estabilidad:
Margen de ganancia: 3.681
Margen de Fase: 58.4 grados
Margen de m odulo: 0.664 (3,56dB)
Margen de retardo: 9.4 s
La gura muestra las se nales de respuesta al escalon de referencia, donde se
aprecia m as aumento del sobrepaso.
J. Ramrez y E. Rosero 155 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
0 10 20 30 40 50 60 70 80 90 100
0
0.2
0.4
0.6
0.8
1
1.2
1.4
C
(
t
)
0 10 20 30 40 50 60 70 80 90 100
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Tiempo [s]
U
(
t
)
Figura 4.14: Desempe no del regulador numerico PID1, w
0
= 0,15 rad/s
El sobrepaso debido al cero del controlador se puede evitar usando un PID en
forma de velocidad, donde la accion PD solo act ua sobre la medida.
En este caso el controlador tiene la estructura general RST:
S(z)u(z) +R(z)c(z) = T(z)r(z)
J. Ramrez y E. Rosero 156 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
T(z)
r(z)
+
1
S(z)
R(z)
G(z)
u(z)
c(z)
Figura 4.15: Diagrama de bloques RST
Con R(z) = r
0
+r
1
z
1
+r
2
z
2
y S(z) = (1 z
1
)(1 +s
1
z
1
).
En red cerrada se obtiene:
G
RC
(z) =
TB
AS +BR
La G
RC
(z) deseada se puede especicar como: G
RC
(z) =
P(1)
B(1)
B(z)
P(z)
P(1)
B(1)
ajusta la ganancia DC igual a 1.
P(z): polos deseados de red cerrada
B(z): cero de G(z)
Luego, T =
P(1)
B(1)
P = AS +BR P(1) = A(1)S(1) +B(1)R(1) = B(1)R(1) T = R(1)
Son los mismos polinomios para R y S, solo cambia T que ya no es R si no
R(1), una constante que preserva la ganacia unitaria del sistema en red cerrada.
El PID continuo equivalente es:
Donde en este caso, las ecuaciones que relacionan el PID continuo con el
J. Ramrez y E. Rosero 157 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
r(s)
+
1
1+
T
d
N
S
k
p
T
i
S
+
K
p
K
p
T
d
S
1+
T
d
N
S
G
p
(s)
C
Figura 4.16: PID equivalente
discreto son:
K
p
=
(r
1
+ 2r
2
)
1 +s
1
(4.9)
T
i
= T
(r
1
+ 2r
2
)
r
o
+r
1
+r
2
(4.10)
T
d
N
=
s
1
T
1 +s
1
(4.11)
T
d
= T
s
1
r
1
+s
1
r
2
r
2
(r
1
+ 2r
2
)(1 +s
1
)
(4.12)
Ejemplo
Consideremos ahora un PID de velocidad con
n
= 0,15rad/seg para el mis-
mo proceso.
Especicaciones: T=5,
0
= 0,15, = 0,8.
El controlador es:
R(z
1
) = 1,6874 0,8924z
1
, cero en 0.53, mayor sobrepaso.
S(z
1
) = (1 z
1
)(1 + 0,3122z
1
), no hay equivalente PID continuo.
J. Ramrez y E. Rosero 158 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
T(z
1
) = 0,795
La gura muestra las senales de respuesta al escalon de referencia, donde se apre-
cia como baja el sobrepaso.
0 10 20 30 40 50 60 70 80 90 100
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
C
(
t
)
0 10 20 30 40 50 60 70 80 90 100
0
0.5
1
1.5
Tiempo [s]
U
(
t
)
Baja el sobrepaso
Seguimiento
Regulacin de la perturbacin
de la carga
Figura 4.17: Desempe nos del regulador numerico PID de velocidad, w
n
= 0,15
rad/s en seguimiento y regulacion.
J. Ramrez y E. Rosero 159 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
4.4.2. Controlador RST
El dise no de el controlador RST por asignacion de polos se puede aplicar a :
Plantas estables e inestables.
Polinomios Ay B de cualquier grado, pero sin factores comunes entre ellos.
Cualquier retardo del proceso.
B con ceros estables e inestables.
La gura muestra la estructura del controlador:
T(z
1
)
r(t) +
R(z
1
)
z
d
B
A
1
S(z
1
)
c(t)
z
d
B(z
1
)
P(z
1
)
Proceso
Figura 4.18: Controlador RST
Se considera un proceso a controlar: G(z) =
z
d
B(z)
A(z)
, donde:
d es el n umero entero de muestreos contenidos en el tiempo muerto,
A(z
1
) = 1 + a
1
z
1
+........... +a
na
z
na
,
B(z
1
) = b
1
z
1
+........... +b
nb
z
n
b
= z
1
B
(z
1
).
La funci on de transferencia en red cerrada es:
G
RC
=
z
d
T(z)B(z)
A(z)S(z) +z
d
B(z)R(z)
J. Ramrez y E. Rosero 160 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
Su denominador se ajustara para obtener el polinomio P(z):
P(z) = 1 +p
1
z
1
+........... +p
np
z
np
= P
D
(z).P
F
(z)
donde:
P
D
(z): Polinomio de segundo orden de los polos dominantes en red cerrada para
y
n
deseados,
P
F
(z): Polos auxiliares de red cerrada; ltran en cierta zona de frecuencias para
reducir efectos del ruido de medida, suavizar las variaciones de u(t) o mejorar la
robust ez.
Regulaci on: C alculo de R y S
Los polinomios S(z) y R(z) son de la forma:
S(z
1
) = 1 +s
1
z
1
+.... +s
ns
z
ns
(4.13)
R(z
1
) = r
0
+ r
1
z
1
+.... +r
nr
z
nr
(4.14)
Para calcularlos, se debe resolver la Ecuaci on Diof antica:
A(z
1
)S(z
1
) +z
d
B(z
1
)R(z
1
) = P(z
1
) (4.15)
con los polinomios A y B primos entre ellos; el primer sumando de la ecuacion
tiene grado n
a
+n
s
y el segundo d +n
b
+n
r
; esta ecuaci on puede tener innitas
soluciones, pero hay soluci on unica, si se igualan los grados de cada sumando a:
n
a
+n
b
+d 1:
n
s
= n
b
+d 1 (4.16)
n
r
= n
a
1 (4.17)
n
p
n
a
+n
b
+d 1 (4.18)
Una forma de soluci on es escribir la ecuacion en la forma matricial: MX = P,
donde:
J. Ramrez y E. Rosero 161 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
X =
_
_
1
s
1
.
.
s
ns
r
0
.
.
r
nr
_
_
P =
_
_
1
p
1
.
.
p
np
0
.
.
0
_
_
M
_
_
1 0 . . . 0 0 . . 0
a
1
1 . . . . b
1
. . .
a
2
a
1
. . . 0 b
2
. . 0
. a
2
. . . 1 . . . b
1
. . . . . a
1
0 . . b
2
a
na
. . . . a
2
b
n
. . .
0 a
na
. . . . 0 . . .
. . . . . . . . . .
0 . . . 0 a
na
0 . 0 b
nb
_
_
M: Matriz de Silvester, cuadrada de orden n
a
+n
b
+d, donde:
b
i
= 0; i = 0, 1..d
b
i
= b
id
; i d + 1
El vector de los coecientes de los polinomios R y S, se obtiene de:
X = M
1
P
Muchas veces los polinomios R y S tienen partes jas pre-especicadas; en
tal caso se factorizan como:
R(z
1
) = R
(z
1
)H
r
(z
1
)
S(z
1
) = S
(z
1
)H
s
(z
1
)
H
r
y H
s
: pre-especicados.
La ecuaci on diof antica sera:
AH
s
S
+z
d
BH
r
R
= P (4.19)
donde AH
s
es un nuevo A
y BH
r
un nuevo B
.
Veamos los casos m as frecuentes que exigen partes jas en R y S:
Error permanente e
ss
nulo para entrada de referencia o una perturbacion
escal on:
S
cd
=
AS
P
[
z=1
= 0 H
s
= (1 z
1
)
J. Ramrez y E. Rosero 162 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
Rechazo de perturbacion arm onica de frecuencia w
p
:
H
s
= 1 2cosw
p
Tz
1
+z
2
Son ceros complejos no amortiguados; para dar solo cierta atenuacion, los
ceros ser an complejos amortiguados, dando el coecientede amortiguamien-
to la atenuaci on deseada.
Bloqueo de se nal: En ciertos casos la senal medida contiene componentes
a ciertas frecuencias sobre las cuales la realimentacion no debe actuar para
no atenuar su efecto, pues son inherentes al proceso de fabricacion o bien,
la se nal de control no debe excitar modos oscilatorios de la planta. Para
no tener esta se nal en u(t), se deben tener ceros en R(z
1
) de forma que
S
ud
(z
1
) = 0 en la frecuencia w
p
dada.
H
r
(z
1
) = 1 2cosw
p
Tz
1
+z
2
Robust ez: Para garantizar ciertos margenes de robustez, se pueden necesitar
t erminos en H
r
y H
s
para corregir la respuesta de frecuencia de S
cd
y S
ud
en ciertas zonas de frecuencia.
Seguimiento: C alculo de T
El polinomio T(z) dene la din amica del seguimiento; consideramos que se
desean seguir las respuestas de un modelo de referencia G
m
(z):
z
(1+d)
Bm(z)
Am(z)
r(t) C
(t)
trayectoria deseada
para la salida
Modelo de
referencia
:
}
Figura 4.19: Modelo de referencia
J. Ramrez y E. Rosero 163 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
G
m
(z) =
B
m
(z)
A
m
(z)
=
z
(1+d)
(b
m0
+b
m1
z
1
)
1 +a
m1
z
1
+a
m2
z
2
por la restricci on de causalidad, el retardo z
(1+d)
no se puede compensar.
Como G(z) =
z
d
B
A
=
z
d
B
z
1
A
=
z
(1+d)
B
A
, la din amica en red cerrada
es:
G
RC
=
c(z)
r(z)
= z
(1+d)
.
B
m
(z)
A
m
(z)
.
T(z)B
(z)
P(z)
Noten que T(z) debe:
Cancelar la dinamica de regulacion P(z), la cual se asume diferente a la de
seguimiento A
m
(z).
Generar una ganancia de estado estable unitaria entre c(t) y c
(t)
Por lo tanto,
T(z
1
) =
_
_
_
_
_
P(z
1
)
B(1)
, si B(1) ,= 0
P(z
1
), si B(1) = 0
_
_
(4.20)
B(1) = 0 solo en el caso en que exista una derivada en B(z).
La ley de control es:
S(z)u(t) +R(z)c(t) = T(z)c
(t +d + 1)
como se muestra en la gura.
J. Ramrez y E. Rosero 164 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
Bm
Am
r(t)
c
(t + d + 1)
T
1
S
+
R
z
d
B
A
u(t)
c(t)
z
(d+1)
B
(z
1
)
P(z
1
)
z
(d+1)
B
(z
1
)
B(1)
z
(d+1)
Bm(z
1
)B
(z
1
)
Am(z
1
B(1)
Figura 4.20: Controlador RST para seguimiento y regulacion.
Noten que la funci on de transferencia total en red cerrada del sistema es:
G
RC
(z
1
) =
z
(d+1)
B
m
(z
1
)
A
m
(z
1
)
.
B
(z
1
)
B(1)
Ejemplo
Consideremos el proceso:
B(z)
A(z)
=
0,1z
1
+ 0,2z
2
1 1,3z
1
+ 0,42z
2
el cual tiene un cero inestable y polos en z
1
= 0,6 y z
2
= 0,7. Se tiene un perodo
de muestreo de T = 1 segundos; se requiere accion integral en el controlador y
din amicas deseadas de:
Seguimientocon w
n
= 0,5; = 0,9; por tanto:
B
m
A
m
=
0,09 + 0,06z
1
1 1,24z
1
+ 0,4z
2
Regulaci on con w
n
= 0,4; = 0,9, esto es: P(z) = 1 1,37z
1
+ 0,48z
2
J. Ramrez y E. Rosero 165 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
La ley de control es:
S(z
1
).u(t) +R(z
1
).c(t) = T(z
1
)c
(t +d + 1)
c
(t +d + 1) = [
B
m
(z
1
)
A
m
(z
1
)
]r(t)
Donde:
R(z
1
) = 3,0 3,94z
1
+ 1,3141z
2
S(z
1
) = 1 0,3742z
1
0,6258z
2
T(z
1
) = 3,333 4,5806z
1
+ 1,6225z
2
El sistema en red cerrada tiene unos margenes de estabilidad:
Margen de ganancia: 2.703
Margen de Fase: 65.4 grados
Margen de m odulo: 0.618 (4,19dB)
Margen de retardo: 2.1 s
La gura 4.21 muestra la respuesta en el tiempo del sistema controlado para
seguimiento y regulacion; se observa que se obtiene el desempeno deseado.
Regulaci on y Seguimiento para Plantas con Ceros Estables
Si los ceros de B(z) son estables se pueden cancelar, obteniendose seguimien-
to independiente de la regulacion.
Para el dise no de la Regulaci on, S(z) contiene los ceros B(z) de la planta:
S(z) = B
(z)S
(z)
La funci on de transferencia en red cerrada sera:
G
RC
(z) =
z
(1+d)
B
(z)
A(z)S(z) +z
(1+d)
B
(z)R(z)
=
z
(1+d)
A(z)S
(z) +z
(1+d)
R(z)
Luego se tiene la ecuacion caracterstica:
P(z) = A(z)S
(z) +z
(1+d)
R(z)
J. Ramrez y E. Rosero 166 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
0 10 20 30 40 50 60 70 80 90 100
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
C
(
t
)
0 10 20 30 40 50 60 70 80 90 100
0
0.2
0.4
0.6
0.8
1
1.2
Tiempo [s]
U
(
t
)
Figura 4.21: Desempe nos controlador RST en seguimiento y regulacion, asig-
naci on de polos.
La Ecuaci on Diof antica tiene solucion unica escogiendo:
n
s
= d (4.21)
n
r
= n
a
1 (4.22)
n
p
n
a
+d (4.23)
La ecuaci on MX = P, tiene los vectores X y P y la matriz M de Silvester:
J. Ramrez y E. Rosero 167 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
X =
_
_
1
s
1
.
.
s
d
r
0
.
.
r
n1
_
_
P =
_
_
1
p
1
.
.
p
na
p
na+1
.
.
p
na+d
_
_
M
_
_
1 0 0
a
1
1 .
a
2
a
1
0 .
. . . . . 1 1 .
a
d
a
d1
. . . a
1
a
1
1 .
a
d+1
a
d
a
2
0 .
a
d+2
a
d+1
. .
. 0
0 0 . . . 0 a
na
0 0 1
_
_
Como M es triangular inferior se puede resolver el sistema de ecuaciones sin in-
versi on de la matriz.
Para el dise no del Seguimiento, T(z) = P(z), ya no hay ceros en red cerrada
que afecten la dinamica de seguimiento; la estructura del controlador se muestra
en la gura 4.22.
Bm
Am
r(t)
c
(t + d + 1)
T
1
S
+
R
z
d
B
A
u(t)
c(t)
z
(d+1)
P(z
1
)
z
(d+1)
z
(d+1)
Bm(z
1
)
Am(z
1
)
Figura 4.22: Controlador RST para plantas con ceros estables.
Cabe anotar que el seguimiento y la regulacion independientes no se pueden
aplicar a plantas con ceros inestables; ellas se obtienen con un retardo fraccional
mayor a T/2, lo cual se da si se muestrea muy r apido una planta que tenga grado
relativo estrictamente mayor a cero (exceso de polos a ceros). Tampoco en conve-
J. Ramrez y E. Rosero 168 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
niente cancelar ceros poco amortiguados, por las oscilaciones que se generan en
la se nal de control u(t); la gura 4.23 muestra la regi on de ubicaci on de los ceros
que si se pueden cancelar.
cte
w
n
cte
Region de
ceros cancelables
Figura 4.23: Regi on de ceros cancelables.
J. Ramrez y E. Rosero 169 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
Ejercicios Propuestos: Asignaci on de polos
1. Realice los calculo para obtener los controladores PID y RST, de los ejem-
plos vistos en clase.
2. Para el sistema:
T
+
1
s
R
0.2z
1
+0,1z
2
11.3z
1
+0.42z
2
C
r
T = 1seg
Figura 4.24: Ejercicio controlador RST.
Dise ne el controlador RST para obtener dinamicas de seguimiento y de re-
gulaci on iguales con: = 0,9 y w
n
= 0,4 rad/seg; considere accion I en el
controlador.
3. Para el sistema:
1
s
u(t)
d = 0.1sen(
2
t)
c(t)
+
+
Figura 4.25: Planta con perturbacion peri odica.
dise ne un controlador digital RST (T=1 seg) que rechace la perturbacion
senoidal.
J. Ramrez y E. Rosero 170 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
4. Repita 3. con d = 0; considere que la planta tiene un modo resonante con
frecuencia de 0,25 Hz que no debe excitarse.
J. Ramrez y E. Rosero 171 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
Resumen
Este captulo se dedic o al dise no de sistemas de control lineales. Se revisaron
las consideraciones fundamentales mas importantes para el diseno, en t erminos
de reglas, restricciones, arquitecturas posibles y las especicaciones deseadas de
desenpe no tanto en el tiempo como en la frecuencia. Se estudiaron diversos meto-
dos de dise no en el dominio del tiempo y en el dominio de la frecuencia tanto para
sistemas control digitales como continuos. Finalmente estudiamos el metodo de
dise no por sntesis de asignaci on de polos para controladores PID y RST; para este
ultimo, inclumos m as restricciones de dise no como el ltrado de perturbaciones
o el bloqueo de se nales en el lazo.
Actividades de aprendizaje
1. Realice:
Una lectura reexiva y crtica del material del curso.
2. Desarrolle los ejercicios propuestos de este captulo, adem as desarrolle el
procedimiento para resolver los diferentes ejemplos de controladores RST.
3. Para el sistema de control de la gura 4.26:
Se desea un error permanente nulo debido al disturbio d(t) y una din amica
C/R sin ceros y con un par de polos complejos con = 0,75 y w
n
= 2
rad/seg. Seleccione y ajuste los controladores G
ci
(s), i = 1, 2, 3 apropiados.
4. Para el sistema G(z) =
0,5(z0,2)
z(z0,6)
con T = 0,5. Dise ne un controlador RST
para obtener un error permanente nulo, una dinamica de regulacion con
= 0,8 y w
n
= 0,5 y una din amica de seguimiento sin ceros, con = 0,8
y w
n
= 0,5 rad/seg.
5. Para el sistema: G(z) =
0,4
z0,6
; T = 1, dise ne un controlador RST y su
modelo de referencia G
m
(z) =
Bm(z)
Am(z)
de forma que obtenga dinamicas de
regulaci on y seguimiento iguales con = 0,8 y w
n
= 0,5; se requiere error
de posici on nulo.
J. Ramrez y E. Rosero 172 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
G
c1
(s)
G
c2
(s)
G
c3
(s)
1
0.2s+1
1
s+1
1
s
+
-
+
D(s) =
1
s
+
+
+
E(s)
C(s)
R(s)
Figura 4.26: Sistema de control
Lecturas complementarias
Kuo Benjamin, Sistemas de control automatico, Prentice Hall, 1997. Captu-
lo 10: Dise no de sistemas de control.
Astrom Karl and Wittenmark Bjorn. Computer Controlled systems: theo-
ry and design, Prentice Hall information and system sciences series, 1997.
Captulo 4: Pole place Design: a state space aproach.
Referencias
KUO BENJAMIN, Sistemas de Control Autom atico, Prentice Hall 1997.
OGATA KATSUSHITO, Ingenier a de Control Moderno, P.H.H. 3 edicion,
1998.
J. Ramrez y E. Rosero 173 GICI
4.4. DISE
NO POR ASIGNACI
ON DE POLOS (S
INTESIS)
OGATA KATSUSHITO, Sistemas de Control en Tiempo Discreto. P.H.H,
M ex. 1996.
LANDAU IOAN, Identication et commande des systemes. Hermes, 2da
edition. 1993.
J. Ramrez y E. Rosero 174 GICI
Captulo 5
Dise no en el Espacio de Estado de
Sistemas de Control Digitales
Introducci on
Un sistema de control moderno puede tener muchas entradas y muchas salidas
interrelacionadas. Los metodos en el espacio de estado para el analisis y sntesis
de sistemas de control son mas adecuados para tratar con sistemas con varias
entradas y varias salidas. El diseno bajo la representacion de espacio de estado, se
desarrolla en dos pasos independientes:
Se dise na la ley de control asumiendo que todos los estados son disponibles
para prop ositos de realimentacion; en la pr actica, no es usual encontrar que
todos los estados sean medibles.
Dise nar un observador de los estados; este calcula el vector de estados a
partir de las salidas y las entradas del proceso.
Al nal la estrategia de control sera la ley de control y el observador combina-
dos, donde la ley de control se calcula a partir de los estados observados en lugar
de los estados reales; se vera que la din amica en lazo cerrado no se modica por
dise nar separadamente la ley de control y el observador. (Principio de separacion).
En esta unidad se presentaran los conceptos fundamentales de la controlabilidad
y observabilidad para el control por variables de estado y el diseno de leyes de
control y observadores de estado bajo este enfoque.
175
5.1. DISE
NO DE LA LEY DE CONTROL
Objetivos
Analizar las propiedades de estabilidad, controlabilidad y observabilidad de
un sistema din amico. Objetivo de evaluaci on
Analizar las diferentes representaciones de un sistema dinamico, obtenidas
mediante transformaciones lineales. Objetivo desntesis
Dise nar y evaluar la ley de control y el observador de estado apropiado
para un sistema descrito en el espacio de estado. Objetivos de sntesis y
evaluaci on
Contenidos
5.1. Dise no de la Ley de Control
Una ley de control simple, consiste en realimentar la combinacion lineal de
estados; para sistemas de una entrada, una salida:
u(k) = k
1
x
1
(k) k
2
x
2
(k) ... k
n
x
n
(k)
u(k) = [k
1
k
2
...k
n
]
_
_
x
1
x
2
.
.
.
_
_
= Kx(k)
K: Matriz de ganancias de realimentacion de estados.
La gura 5.1 muestra el diagrama de bloques de este arreglo. Para sistemas mono-
variables, la matriz K que permite obtener determinados modos de lazo cerrado
es unica; para los sistemas de multiples entradas y m ultiples salidas, K es una
matriz de [N umero de entradas N umero de estados] y no es unica para obtener
ciertos modos de red cerrada; en este caso, se puede optimizar el diseno para dar
J. Ramrez y E. Rosero 176 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
u(k)
+
+
x(k + 1)
Z
1
I
G
K
x(k)
C
y(k)
H
Figura 5.1: Realimentaci on de estado.
cierta forma a la respuesta.
Reemplazando u(k) en la ecuaci on de estado:
X(k + 1) = GX(k) +HU(k)
X(k + 1) = GX(k) HKX(k)
X(k + 1) = [G HK] +X(k)
Din amica de lazo abierto: Valores propios de G
Din amica de lazo cerrado: Valores propios de GHK
Por tanto, los polos de lazo cerrado se pueden denir escogiendo apropiadamente
la matriz K.
Considerando la ecuacion caracterstica deseada:
d
(z) = (z
1
)(z
2
).... = 0 (5.1)
Se tendr an los polos deseados en:
1
,
2
, ...; la ecuaci on caracterstica del sistema
en red cerrada es:
det [zI G +HK] = 0
K se escoge igualando los coecientes de ambas ecuaciones.
J. Ramrez y E. Rosero 177 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
Ejemplo
Para el sistema:
ROC
K
u(t)
1
s
x
2
T
u(k)
T = 0.1s
x
1
y(t)
1
s
Calcular K para obtener una ecuacion caracterstica con una dinamica equiv-
alente a la de un sistema continuo con = 0,5 y un w
n
= 3,6.
En el plano Z los polos deben estar en:
r = e
wnT
= 0,835
= w
d
T = 17,9
o
La ecuaci on caracterstica ser a:
(z 0,837e
j7,19
)(z 0,837e
j7,19
) = z
2
1,6z + 0,7 = 0
La planta continua es:
_
x
1
x
2
_
=
_
0 1
0 0
_ _
x
1
x
2
_
+
_
0
1
_
u ; Y =
_
1 0
_
x
1
x
2
_
Discretizando:
G(T) = e
A T
=
1
[(sI A)
1
]
t = T
=
_
1 T
0 1
_
H(T) = [
_
T
0
e
A T
dt] B =
_
_
T
2
2
T
_
_
J. Ramrez y E. Rosero 178 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
det[zIG+HK] = det
_
z
_
1 0
0 1
_
_
1 T
0 1
_
+
_
_
T
2
2
T
_
_
_
k
1
k
2
_
= 0
z
2
+ [Tk
2
+
T
2
2
k
1
2]z +
T
2
2
k
1
Tk
2
+ 1 = 0
Igualando coecientes:
T k
2
+
T
2
2
k
1
2 = 1,6
T
2
2
k
1
T k
2
+ 1 = 0,7
Con T = 0,1, se obtiene: k
1
= 10, k
2
= 3,5.
Para sistemas de alto orden los calculos deben realizarse con un programa de
manipulaci on algebraica, o bien, aplicar tecnicas analticas tales como pasar a la
forma can onica controlable (FCC) o con la f ormula de Ackerman.
5.1.1. Dise no de K a partir de la Forma Can onica Controlable
El c alculo de K se simplica si el sistema se encuentra en la Forma Canonica
Controlable; si la ecuacion caracterstica es:
[zI G[ = z
n
+a
1
z
n1
+... +a
n1
z + a
n
= 0
La Forma Can onica Controlable de este sistema sera:
G =
_
_
0 1 0 . . . . 0
0 0 1 0 . . . 0
.
.
.
a
n
a
n1
. . . . . a
1
_
_
, H =
_
_
0
0
.
.
.
1
_
_
J. Ramrez y E. Rosero 179 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
Con: K =
_
k
1
k
2
. . . k
n
, el sistema realimentado tiene la matriz
sistema:
GHK =
_
_
0 1 0 . . . . 0
0 0 1 0 . . . 0
.
.
.
a
n
k
1
a
n1
k
2
. . . . . . a
1
k
n
_
_
La ecuaci on caracterstica en red cerrada es:
z
n
+ (a
1
+k
n
) z
n1
+ (a
2
+k
n1
) z
n2
+. . . +(a
n1
+k
2
) z + a
n
+ k
1
= 0
La ecuaci on caracterstica deseada:
z
n
+
1
z
n1
+ . . . +
n1
z +
n
= 0
Igualando coecientes:
a
1
+k
n
=
1
k
n
=
1
a
1
a
2
+k
n1
=
2
k
n1
=
2
a
2
.
.
.
a
n
+k
1
=
n
k
1
=
n
a
n
Si el sistema no se encuentra en la Forma Canonica Controlable, se puede utilizar
una transformaci on lineal:
X(k) = T X (K)
J. Ramrez y E. Rosero 180 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
En donde T es una matriz n x n no singular y X el nuevo estado; as, el sistema:
X(k + 1) = GX(k) +HU(k)
Y (k) = CX(k) +DU(k)
Pasa a ser:
T X (k + 1) = G T X(k) + H U (k)
X (k + 1) = T
1
G T X (k) + T
1
H U(k)
Y (k) = C T X(k) + D U(k)
El sistema transformado tiene las matrices:
G = T
1
GT , H = T
1
H ; C = CT ; D = D
Una transformaci on de este tipo se denomina de similitud ya que el sistema trans-
formado tiene las mismas propiedades dinamicas del sistema original, tales como
la misma ecuaci on caracterstica, funci on de transferencia y vectores propios; en
efecto, la ecuaci on caracterstica del sistema transformado es:
[zI G[ = [zI T
1
GT[ = [z T
1
T T
1
GT[
[T
1
(zT GT)[ = [T
1
(zI G)T[ = [T
1
[[zI G[[T[
[T
1
[[T[
. .
1
[zI G[ = [zI G[
Luego la ecuaci on es la misma y por ende los valores y vectores propios.
La matriz de funciones de transferencia del sistema transformado es:
G(z) = C(zI G)
1
H + D
= CT(zI T
1
GT)
1
.T
1
H + D
= C(zI G)H +D = G(z)
Para obtener G, H en la Forma Can onica Controlable, la transformada T debe ser:
T = MW
J. Ramrez y E. Rosero 181 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
Con: M = [H : GH : . . . : G
n1
: H] de rango n, y:
W =
_
_
a
n1
a
n2
. . . a
1
1
a
n2
a
n3
. . . 1 0
.
.
.
a
1
1 . . . 0 0
1 0 . . . 0 0
_
_
Los a
i
son los coecientes de la ecuacion caracterstica:
z
n
+a
1
z
n1
+... +a
n
= 0
Se puede mostrar que:
T
1
GT =
_
_
0 1 0 . . . 0
.
.
.
a
n
a
n1
. . . . a
1
_
_
, T
1
H =
_
_
0
0
.
.
.
1
_
_
CT = [b
n
a
n
b
0
: b
n1
a
n1
b
0
: . . . : b
1
a
1
b
0
]
b
i
: coecientes del polinomio del numerador de G(z).
Ejemplo
Para el ejemplo anterior, calcular k
1
y k
2
via la Forma Can onica Controlable,
con perodo de muestreo T = 0,1.
Se obtuvo:
G =
_
1 0,1
0 1
_
H =
_
5 10
3
0,1
_
M = [H : GH] =
_
5 10
3
1,5 10
2
0,1 0,1
_
;
J. Ramrez y E. Rosero 182 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
El rango de M es 2, y dene el numero de columnas o las linealmente indepen-
dientes.
[zIG[ =
_
z 1 0,1
0 z 1
_
= (z1)
2
= z
2
2z +1 ; a
1
= 2 , a
2
= 1
W =
_
a
1
1
1 1
_
=
_
2 0
1 0
_
T = MW =
_
5 10
3
5 10
2
0,1 0,1
_
; T
1
=
_
100 5
100 5
_
_
x
1
(k + 1)
x
2
(k + 1)
_
=
_
0 1
1 2
_ _
x
1
(k)
x
2
(k)
_
+
_
0
1
_
U(k)
Donde:
X(k + 1) = T
1
G T X
1
(k) + T
1
u (k)
Si u(k) = K X (k), con la ecuaci on caracterstica deseada: z
2
1,6 z +0,7 = 0
1
= 1,6 ,
2
= 0,7
k
1
=
2
a
2
= 0,7 1 = 0,3
k
2
=
1
a
1
= 1,6 + 2 = 0,4
En las coordenadas originales:
u(K) = K T
1
X (k)
K = K T
1
K =
_
0,3 0,4
_
100 5
100 5
_
=
_
10
..
k
1
3,5
..
k
2
_
Con este procedimiento, lamatriz de realimentacion K puede calcularse directa-
mente de:
K = [
n
a
n
:
n
1 a
n
1 : ...
1
a]T
1
J. Ramrez y E. Rosero 183 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
N otese que el procedimiento es aplicable si T tiene inversa T
1
; esto no sucede
en sistemas donde el control no puede ubicar arbitrariamente todos los estados;
la noci on que describe cuando un sistema puede controlarse completamente es la
Controlabilidad Completa de Estado.
Controlabilidad Completa de Estado
Considerando un sistema de una entrada y una salida:
X((k + 1)T) = GX(kT) +Hu(kT),
X '
n
, u ', u(kT) constante entre muestreos, esto es, para: kT t <
(k +1)T, el sistema es de estado controlable, si existe una se nal de control, con-
stante por secciones u(kT) en un intervalo nito de muestreos 0 kT nT, tal
que, partiendo de cualquier estado inicial, el estado X(kT) puede transferirse a un
estado deseado X
d
en m aximo n perodos de muestreo (si u(kT) no es limitado).
Esta denici on permite obtener una prueba matematica de la controlabilidad
de un sistema; la soluci on de la ecuaci on de estado en el muestreo n es:
X(nT) = G
n
X(0) +
n1
j=0
G
nj1
H u(jT)
X(nT) = G
n
X(0) +G
n1
Hu(0) +G
n2
Hu(T) +... +Hu((n 1)T)
Luego:
X(nT)G
n
X(0) = [
vector columna n1
..
H : GH : . . . : G
n1
H]
. .
Mnn: Matriz de Controlabilidad
_
_
u((n 1)T)
u((n 2)T)
.
.
.
u(0)
_
_
Para que exista soluci on ( unica para sistemas monovariables) para la secuencia
de control que lleva del estado inicial X(0) al X(nT), la matriz de controlabi-
lidad debe ser invertible, o sea de rango n; esto es, los vectores H, GH... deben
ser linealmente independientes. Para un sistema multivariable la condicion es que
M(n nr) sea de rango n, en este caso existen innitas secuencias del vector de
J. Ramrez y E. Rosero 184 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
control que pueden llevar desde el estado inicial al nal en maximo n muestreos.
Ejemplo
El sistema:
_
x
1
(k + 1)
x
2
(k + 1)
_
=
_
0 1
0,16 1
_ _
x
1
(k)
x
2
(k)
_
+
_
1
0,8
_
u(k)
y(k) =
_
1 0
_
x
1
(k)
x
2
(k)
_
Tiene una matriz de controlabilidad:
M = [H : GH] =
_
1 0,8
0,8 0,64
_
; det[M] = 0
M es de rango 1 el sistema no es de estado completamente controlable.
Ejemplo
El sistema:
_
x
1
(k + 1)
x
2
(k + 1)
_
=
_
0,1 0
0 0,2
_ _
x
1
(k)
x
2
(k)
_
+
_
1
0
_
u(k)
Al ser diagonal, los estados estan desacoplados, para ser de estado completamente
controlable, ning un elemento (la para sistemas multivariables) de H debe ser
nulo; en este caso el modo = 0,2 no es controlable; como es estable, el sistema
es Estabilizable.
Controlabilidad en el Plano Z
La condici on de controlabilidad de estado completo se establece en el plano
Z en t erminos de que no ocurran cancelaciones polo-cero en la funcion de trans-
ferencia discreta (sistemas monovariables) o en la matriz de funciones de trans-
ferencia (sistemas multivariables); si ocurren cancelaciones, el sistema sera o no
controlable, o no observable (ver mas adelante) o ambos, dependiendo de como
se denan las variables de estado.
J. Ramrez y E. Rosero 185 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
Ejemplo
El sistema con
G =
_
0 1
0,16 1
_
, H =
_
1
0,8
_
, C =
_
1 0
Tiene:
y(z)
u(z)
= C (zI G)
1
H =
z + 0,2
(z + 0,8)(z + 0,2)
La cancelaci on del polo (z + 0,2) con el cero no permite controlar el modo en
z = 0,2 y el sistema no es de estado completamente controlable, como se verif-
ic o al evaluar
[M[ =
1 0,8
0,8 0,64
= 0
Controlabilidad Completa de Salida
En el dise no de sistemas de control, se puede desear controlar la salida en
lugar del estado del sistema; la controlabilidad del estado no garantiza la contro-
labilidad de la salida.
El sistema:
X((k + 1)T) = GX(kT) +HU(kT)
Y (kT) = CX(kT) +DU(kT)
Con n estados, r entradas y m salidas, se dice que es de salida completamente
controlable (SCC), si es posible construir un vector de control U(kT) no acota-
do, sobre un n umero nito de periodos de muestreos 0 kT nT tal que
empezando desde la salida inicial Y (0), la salida Y (kT) se puede llevar a un
punto arbitrario deseado Y
d
, en m aximo n muestreos. De forma analoga a la con-
trolabilidad completa del estado, se puede mostrar que un sistema es de Salida
Completamente Controlable si y solo si la matriz:
[ D : C H : C G H : ... : C G
n1
H ]
m(n+1)r
es de rango m; note que D y C aportan a la controlabilidad de salida.
J. Ramrez y E. Rosero 186 GICI
5.1. DISE
NO DE LA LEY DE CONTROL
5.1.2. Dise no de K Mediante la F ormula de Ackermann
Ackermann us o el teorema de Carley - Hamilton (Una matriz G satisface su
propia ecuaci on caracterstica) para sistemas monovariables, lo que lleva a una
f ormula directa para calcular K:
K = [0 0 0 . . . 1] [M]
1
d
(G)
Donde
d
(G) es
d
(z) el polinomio caraterstico deseado reemplazando z por
G. (Ver Ogata [1998] para la demostracion).
Ejemplo
Para el sistema doble integrador, calcular K va la f ormula de Ackermann.
G =
_
1 0,1
0 1
_
, H =
_
5 10
3
0,1
_
Ecuaci on caracterstica deseada: z
2
1,6 z + 0,7 = 0; se calcul o
M =
_
5 10
3
1,5 10
2
0,1 0,1
_
M
1
=
_
100 15
100 5
_
d
(G) =
_
1 0,1
0 1
_
2
+ 1,6
_
1 0,1
0 1
_
+ 0,7
_
1 0
0 1
_
d
(G) =
_
0,1 0,04
0 0,1
_
K =
_
0 1
_
100 15
100 5
_ _
0,1 0,04
0 0,1
_
K = [10 3,5]
El mismo K obtenido con anterioridad.
J. Ramrez y E. Rosero 187 GICI
5.2. DISE
NO DEL OBSERVADOR
5.2. Dise no del Observador
Como no todos los estados son medibles, se requiere de algoritmos que los
reconstruyan a partir de las medidas del sistema y del control aplicado; con el
estado calculado x(k) se aplica la ley de control u (k) = K x(k), como se
ilustra en la gura.
u(k)
+
+
x(k + 1)
Z
1
I
G
Observador
x(k)
C
y(k)
H
de estados
K
x(k)
Figura 5.2: Observador de Estado.
5.2.1. Observador de Predicci on
Una forma de estimar los estados es construir un modelo de la planta:
X(k + 1) = G
X(k) + HU(k)
X es la estimaci on del estado X(k); como G, H y U(k) son conocidos, el esti-
mador funciona si se puede obtener el correcto
X(0) ajustado a X(0); la gura
5.2.1 ilustra el diagrama de bloques del estimador.
Se desea que el error de observacion: e(k) = X(k)
X(k) tienda asint oticamente
a cero; la din amica del error de observacion la calculamos evaluando e(k + 1) en
funci on de e(k):
e(k + 1) = X(k + 1)
X(k + 1) = GX(k) +HU(k) G
X(k) HU(K)
e(k + 1) = G e(k)
Se observa que la dinamica del error es igual a la de la planta sin control; si la
planta es estable, la dinamica del error sera estable y
X X pero a una ve-
locidad de convergencia inadecuada pues normalmente el control busca mejorar
la velocidad de la planta G; si G inestable el error no converge a cero.
J. Ramrez y E. Rosero 188 GICI
5.2. DISE
NO DEL OBSERVADOR
u(k)
x(0)
x(0)
x(k)
y(k)
x(k)
y(k)
Planta G,H
Modelo G,H
Estimador
Observador de
Lazo Abierto
C
C
Figura 5.3: Estimador de Estados.
Se puede usar la salida Y (k) disponible, para mejorar el comportamiento dinami-
co del error, tomando la diferencia (Y (k)
Y (k)), con
Y (k) = C
X(k) y usando
esta diferencia para disminuir el error e(k):
X(k + 1) = G
X(k) +HU(k)
. .
planta
+ K
o
[Y (k) C
X(k)]
. .
error de estimacion
K
o
: Matriz de peso para ajustar la dinamica del observador.
u(k)
x(k)
y(k)
K
0
x(k)
y(k)
+
C
C
Planta G,H
Modelo G,H
Observador de prediccion estima x(k + 1) a partir del valor presente Y (k)
Figura 5.4: Observador de Predicci on.
J. Ramrez y E. Rosero 189 GICI
5.2. DISE
NO DEL OBSERVADOR
Reordenando:
X(k+1) = [ G K
o
C ]
. .
sus valores propios son los polos del observador
X(k) + HU(k) + K
o
Y (k)
. .
entradas al observador
La din amica del error e(k) = X(k)
X(k) es ahora:
e (k + 1) = (G K
o
C) e (k)
Los polos de (G K
o
C) denen la din amica del error; se deben escoger lo su-
cientemente r apidos para no afectar la respuesta del sistema en lazo cerrado; por
lo menos 4 veces mas r apido que los modos dominantes de lazo cerrado.
5.2.2. Observabilidad del Estado
La matriz K
o
se calcula de la misma forma que se calcula la matriz de reali-
mentaci on K; nos preguntamos si siempre existira una matriz K
o
que nos ajuste
los modos desedados para el observador? la respuesta a esta pregunta es la nocion
de observabilidad; un sistema no es observable si tiene modos que no aparecen
en sus salidas; por ejemplo, si en un sistema de control de posicion solo se mide
la velocidad, no es posible calcular la posicion inicial.
Para el an alisis consideremos el sistema:
X(kT +T) = GX(kT)
Y (kT) = CX(kT)
con n estados y msalidas; diremos que el sistema es completamente observable,
si conocida la salida Y (kT) en un n umero nito de muestreos, es posible calcular
el vector de estado inicial X(0); solo consideramos el sistema no-forzado pues:
Y (kT) = CG
k
X(0) +
k1
j=0
CG
kj1
HU(jT) +DU(kT),
y como G, H, C, D y U(kT) son conocidos, los t erminos de la sumatoria depen-
dientes de la entrada son terminos conocidos y pueden restarse a Y (kT).
Para el sistema considerado:
Y ( KT ) = C G
k
X(0)
J. Ramrez y E. Rosero 190 GICI
5.2. DISE
NO DEL OBSERVADOR
Conocidos los vectores de salida en los perodos de muestreo: Y (0), Y (T), Y (2T),
. . . , se debe poder calcular el vector de estado inicial: x
1
(0), x
2
(0), . . ., x
n
(0);
como son n inc ognitas, bastar an solo n datos de Y (kT), as:
Y (0) = C X (0),
Y (T) = C G X (0),
.
.
.
Y ((n 1)T) = C G
n1
X (0)
_
_
nm ecuaciones que
incluyen a
x
1
(0), x
2
(0), . . . , x
n
(0)
entre las nm ecuaciones, se debe poder escoger n ecuaciones linealmente inde-
pendientes, esto exige que la matriz de observabilidad N
nmm
:
N =
_
_
C
C G
.
.
.
C G
n1
_
_
debe ser de rango n; como el rango de una matriz es igual al de su transpuesta
conjugada, la observabilidad se puede evaluar de:
RangoC
: G
: . . . (G
)
n1
C
= n
Si G y C son reales: C
= C
T
, G
= G
T
.
De manera dual al caso de controlabilidad para un sistema desacoplado, la ob-
servabilidad se garantiza, si no hay ninguna columna de C nula, pues de serlo, el
estado correspondiente no aparece en la salida y no puede determinarse su valor
inicial a partir de Y (kT); igualmente, en el plano Z si no existen cancelaciones
polo-cero en la matriz de transferencia del sistema, se garantiza la observabilidad.
Ejemplo
Consideremos el sistema doble integrador, con salida de velocidad:
t
1
s
1
s
J. Ramrez y E. Rosero 191 GICI
5.2. DISE
NO DEL OBSERVADOR
G =
_
1 0,1
0 1
_
, H =
_
5 10
3
0,1
_
, C =
_
0 1
N
T
= [C
T
: G
T
C
T
] =
_
0 [
1 [
_
1 0
0,1 1
_ _
0
1
_
_
=
_
0 0
1 1
_
det[N
T
] = 0, rango=1 el sistema no es observable.
Ejemplo
El sistema:
G =
_
_
0,1 0 0 0
0 0,2 0 0
0 0 0,3 0
0 0 0 0,4
_
_
, H =
_
_
1
1
0
0
_
_
, C =
_
1 0 1 0
, D = 0
Por ser G diagonal, se pueden evaluar las condiciones de observabilidad y contro-
labilidad de los estados por inspeccion: x
1
: C y O; x
2
: C y NO; x
3
: NC y O; x
4
:
NC y NO. Usando una descomposici on de la funci on de transferencia discreta en
fracciones parciales, se obtiene el diagrama:
u(k) x
1
(k + 1)
x
2
(k + 1)
x
1
(k)
x
2
(k)
x
3
(k)
x
4
(k)
y(k) +
+
x
3
(k + 1)
x
4
(k + 1)
1
z0.1
1
z0.2
1
z0.3
1
z0.4
C,O
C,NO
NC,O
NC,NO
J. Ramrez y E. Rosero 192 GICI
5.2. DISE
NO DEL OBSERVADOR
La funci on de transferencia controlable y observable es:
Y (z)
U(z)
=
1
z 0,1
La funci on de transferencia discreta del sistema es:
Y (z)
U(z)
= C(zI G)
1
H =
(z 0,2)(z 0,3)(z 0,4)
(z 0,1)(z 0,2)(z 0,3)(z 0,4)
Tiene 3 cancelaciones polo-cero.
Por lo tanto, si el sistema se modela con una funcion de transferencia de orden
mnimosin cancelacion polo-cero, se asegura que el sistema es controlable y ob-
servable independientemente de como se obtenga el modelo en variables de esta-
do; en el caso de existir cancelacion polo-cero, las propiedades de controlabilidad
y observabilidad dependeran de la elecci on de las variables de estado.
Ejemplo
Sea:
Y (z)
U(z)
=
z+2
(z+1)(z+2)
; por descomposici on directa, se obtiene la Forma Canonica
Controlable:
G =
_
0 1
2 3
_
, H =
_
0
1
_
, C =
_
1 1
Como se pudo llegar a la Forma Canonica Controlable, tenemos garanta de que
el par [G , H] es controlable.
La matriz de observabilidad es: N =
_
C
CG
_
=
_
1 1
2 2
_
como es
singular, el par [G, C] no es observable.
Si los estados se toman para obtener la Forma Canonica Observable:
G =
_
0 2
1 3
_
, H =
_
1
1
_
, C
_
0 1
,
El sistema es observable, pero la matriz de controlabilidad:
M = [H GH] =
_
1 2
1 2
_
, es singular y el sistema no es controlable.
J. Ramrez y E. Rosero 193 GICI
5.2. DISE
NO DEL OBSERVADOR
5.2.3. Controlabilidad y Observabilidad para Sistemas Con-
tinuos
Las nociones de controlabilidad y observabilidad para los sistemas de tiempo
continuo son equivalentes a las vistas para los sistemas discretos; as, diremos que
el sistema de tiempo continuo:
X(t) = A X(t) + B U(t)
Y (t) = C X(t) + D U(t)
Es de estado completamente controlable, si y solo si la matriz:
[B : AB : . . . : A
n1
B]
(nnr)
es de rango n.
Es completamente controlable de salida, si y solo si la matriz:
[D : CB : CAB : CA
2
B : . . . : CA
n1
B]
(m(n+1)r)
es de rango m.
Es completamente observable, si y solo si la matriz:
[C
: A
: . . . : (A
)
n1
C
]
(nmm)
es de rango n.
5.2.4. Efecto de la discretizaci onsobre la Observabilidady Con-
trolabilidad
Un sistema continuo con polos complejos puede tener cancelaciones polo-cero
al discretizarlo; un sistema continuo observable y controlable sera observable y
controlable al discretizarse, si y solo si, para un par de polos conjugados comple-
jos, su parte imaginaria w
d
es diferente de:
n
T
, n = 1, 2, ...
Ejemplo
El sistema de tiempo continuo:
_
x
1
x
2
_
=
_
0 1
1 0
_ _
x
1
x
2
_
+
_
0
1
_
u , y =
_
1 0
_
x
1
x
2
_
[B : AB] =
_
0 1
1 0
_
: rango = 2 Controlable
J. Ramrez y E. Rosero 194 GICI
5.2. DISE
NO DEL OBSERVADOR
[C
T
: A
T
B
T
] =
_
1 0
0 1
_
: rango = 2 Observable
El sistema tiene valores propios
12
= j; al discretizarlo, se obtiene:
_
x
1
[(k + 1)T]
x
2
[(k + 1)T]
_
=
_
cos(T) sen(T)
sen(T) cos(T)
_ _
x
1
(kT)
x
2
(kT)
_
+
_
1 cos(T)
sen(T)
_
u(kT)
y(kT) = [1 0] =
_
x
1
(kT)
x
2
(kT)
_
M = [H : GH] =
_
1 cos(T) cos(T) + 1 2cos
2
(T)
sen(T) sen(T) + 2cos(T)sen(T)
_
El rango de M es 2 si y solo si, T ,= n, n = 1, 2, . . .
N
T
= [C
T
: G
T
C
T
] =
_
1 cos(T)
0 sen(T)
_
N tiene rango 2 si y solo si T ,= n.
Se debe escoger el perodo de muestreo, sucientemente pequeno con relaci on
a la din amica m as r apida de la planta, y diferente a
n
w
d
.
5.2.5. C alculo de la Matriz de Realimentaci on del Observador
K
o
Ilustraremos este calculo con un ejemplo.
Ejemplo
Para el sistema doble integrador, disenar un observador de forma que el vector
de error tenga una respuesta sin oscilacion deadbeat.
G =
_
1 0,1
0 1
_
H =
_
5 10
3
0,1
_
C =
_
1 0
J. Ramrez y E. Rosero 195 GICI
5.2. DISE
NO DEL OBSERVADOR
Veamos si es completamente observable:
N
T
= [C
T
: G
T
C
T
] =
_
1 1
0 0,1
_
det (N
T
) = 0,1 ,= 0 rango = 2, es observable.
La ecuaci on caracterstica del sistema es: det (zI G) = z
2
2z + 1 = 0.
Para una respuesta sin oscilacion, se debe alcanzar el valor nal en el menor
n umero de perodos de muestreo; como el sistema es de segundo orden, en 2
muestreos.
La ecuaci on car acterstica deseada para el observador sera: z
2
= 0
K
o
=
_
k
1
k
2
_
; G K
o
C =
_
1 0,1
0 1
_
_
k
1
k
2
_
_
1 0
G K
o
C =
_
1 k
1
0,1
k
2
1
_
det [zI (G K
o
C)] = det
_
z 1 + k
1
0,1
k
2
z 1
_
Este determinante nos da la ecuacion caracterstica del observador:
(z 1 +k
1
)(z 1) + 0,1k
2
= 0
z
2
+ (k
1
2)z + 1 k
1
+ 0,1k
2
= 0
Igualando coecientes con la ecuacion caracterstica deseada: z
2
= 0, se obtiene:
k
1
= 2, k
2
= 10
J. Ramrez y E. Rosero 196 GICI
5.2. DISE
NO DEL OBSERVADOR
Dise no de K
o
a partir de la Forma Can onica Observable
La matriz de realimentacion del observador K
o
se puede obtener llevando el
sistema a la forma canonica observable, mediante la transformacion:
X(k) = Q
X(k), donde Q = (WN)
1
y W es igual al caso de la Forma Canonica
Controlable.
Para el sistema:
X(k + 1) = GX(k) +HU(k)
Y (k) = CX(k),
con [zI G[ = z
n
+a
1
z
n1
+ ... +a
n
= 0, se obtiene:
X(k + 1) = Q
1
GQ
X(k) +Q
1
HU(k)
Y (k) = CQ
X(k)
G = Q
1
GQ =
_
_
0 0 0 . . . a
n
1 0 0 . . . a
n1
0 1 0 . . . a
n2
.
.
.
0 0 0 . . 1 a
1
_
C = CQ = [0 0 . . . 1]
Para el Ejemplo:
N
T
=
_
1 1
0 0,1
_
, W =
_
a
1
1
1 0
_
=
_
2 1
1 0
_
Q = ( WN )
1
=
_
_
2 1
1 0
_ _
1 0
1 0,1
_
_
1
=
_
0 1
10 10
_
G =
_
0 1
1 2
_
C =
_
0 1
G
K
0
C =
_
0 1
1 2
_
_
k
1
k
2
_
_
0 1
=
_
0 1
k
1
1 2
k
2
_
J. Ramrez y E. Rosero 197 GICI
5.2. DISE
NO DEL OBSERVADOR
det (z I
G +
K
0
C) = z
2
+ (2 +
k
2
) z + 1 +
k
1
= z
2
k
1
= 1
k
2
= 2
K
o
= Q
K
o
=
_
0 1
10 10
_ _
1
2
_
=
_
2
10
_
k
1
= 2 ; k
2
= 10
El procedimiento anterior se reduce a:
K
o
= Q
_
n
a
n
n1
a
n1
.
.
.
1
a
1
_
_
Donde los
i
son los coecientes deseados de la ecuacion caracterstica y los a
i
son los coecientes de la ecuacion caracterstica.
Dise no de K
o
a partir de la F ormula de Ackermann
Para el c alculo de la matriz de reralimentacion del observador, tambien pode-
mos usar la formula de Ackermann para observadores:
K
o
=
o
(G)N
1
_
_
0
0
.
.
.
1
_
o
(G) : Polinomio caracterstico del observador, con z = G.
J. Ramrez y E. Rosero 198 GICI
5.2. DISE
NO DEL OBSERVADOR
Para el Ejemplo:
K
o
=
o
(G)
_
_
C
. . .
CG
_
_
1
_
0
1
_
o
(G) = G
2
=
_
1 0,2
0 1
_
K
o
=
_
1 0,2
0 1
_ _
1 0
0 0,1
_
1
_
0
1
_
=
_
2
10
_
Matriz K
o
igual a la obtenida en los ejemplos anteriores.
5.2.6. Observador Corriente
La ley de control U(k) = K
X(k) , usando el observador de prediccion:
X(K) =
prediccion
..
G
X(k 1) + HU(k 1) +K
o
correccion de la estimacion
..
[Y (k 1) C
X(k 1)],
no utiliza la medida de la salida en el instante k, Y (k) as el control U(k) no de-
pende del error de estimacion (Y (k)
Y (k)), lo que genera error de observacion
particularmente importante en sistemas r apidos con tiempos de calculo elevados.
Esto se puede evitar separando la prediccion de estado de la correccion de la esti-
maci on, usando para la correccion de la estimaci on la medida Y (k), as se obtiene
el Observador Corriente:
V (k) = G
X(k 1) +HU(k 1)
_
aproximacion de
X(k)
a partir de
X y U en (k 1)
X(k) = V (k) +K
o
[Y (k) CV (k)
. .
]
Correccion de la estimacion V (k) con la medicion de Y (k)
En la pr actica, el observador no se puede implementar exactamente por los re-
tardos de tiempo de calculo, pero el error de observacion es menor que con el
J. Ramrez y E. Rosero 199 GICI
5.2. DISE
NO DEL OBSERVADOR
observador de predicc on. Se puede mostrar que la ecuacion del error del obser-
vador es:
e(k) = X(k)
X(k)
e(k + 1) = [G K
o
C G] e (k)
Por tanto, K
o
se obtiene de la misma forma que con el observador de prediccion,
reemplazando C por CG; de esta forma, la condicion de observabilidad es que
NG sea de rango n.
K
o
a partir de de la f ormula de Ackermann es:
K
o
=
o
(G)(NG)
1
_
_
0
0
.
.
.
1
_
_
5.2.7. Observador de Orden Reducido
Los observadores anteriores reconstruyen todo el vector de estados, pero pueden
existir estados que se miden directamente y no se requiera estimarlos, o bien, en
general si hay m salidas, ellas son combinacion lineal de los estados y por tan-
to, no es necesario estimar m de los estados, sino s olo n m estados, usando
un observador de orden reducido; sin embargo, con ruido fuerte en la medida,
el observador de orden completo se desempena mejor que el reducido, debido a
que equivale a una compensacion de m as alto orden, lo que genera mayor aten-
uaci on en las altas frecuencias del ruido; por otro lado la implementacion del
observador reducido exige particionar el vector de estados entre los medidos y los
no-medidos, lo que la hace mas compleja; por todo lo anterior, los observadores de
orden reducido no son muy usados en la pr actica; para los detalles de su diseno,ver
[Ogata [1998]].
Ejemplo
Observadores predictor y corriente para el doble integrador.
J. Ramrez y E. Rosero 200 GICI
5.2. DISE
NO DEL OBSERVADOR
Observador Predictor:
La ecuaci on caracterstica del sistema en lazo cerrado fue:
z
2
1,6z + 0,7 = 0 con polos en z = 0,8 j0,25; ello corresponda a
unos polos equivalentes en el plano S con = 0,5 y w
n
= 3,6.
Se pueden ubicar los polos del observador con cercano a 0.5 y con w
n
mu-
cho mayor, para que la dinamica del observador sea mucho mas r apida que
la del sistema en lazo cerrado; con frecuencia natural para el observador de
3,6 3 se obtienen los polos deseados para el observador en z = 0,4 j0,4
y la ecuaci on caracterstica del observador es: z
2
0,8z + 0,32 = 0. Por lo
tanto:
det[zI G+K
o
C] = det
_
_
z 0
0 z
_
_
1 0,1
0 1
_
+
_
k
1
k
2
_
_
1 0
_
z
2
+ (k
1
2) z + 1 k
1
+ 0,1 k
2
= z
2
0,8 z + 0,32 = 0
k
1
2 = 0,8 k
1
= 1,2
1 k
1
+ 0,1 k
2
= 0,32 k
2
= 5,2
Las ecuaciones del estimador son:
x
1
(k + 1) = x
1
(k) + 0,1 x
2
(k) + 0,005u(k) + 1,2[y(k) x
1
(k)]
x
2
(k + 1) = x
2
(k) + 0,1u(k) + 5,2 [y(k) x
1
(k)]
La gura siguente muestra los errores de estimacion para el observador cor-
riente y el de prediccion, donde x
1p
, x
2p
son los estados del observador
predictor y x
1c
, x
2c
son los estados del observador corriente.
La velocidad del transitorio se puede aumentar, con mayores ganancias en
K
o
(con k
2
= 10, la duraci on del transitorio baja a dos muestreos) pero x
1
y x
2
ser an m as sensibles al ruido de medida; este transitorio inicial de error
de estimaci on no es muy importante, comparado con el funcionamiento en
largos perodos de tiempo de un sistema de regulacion en presencia de rui-
do de medida; si los disturbios en la planta son pequenos, polos lentos del
observador dan errores peque nos de estimaci on ante el ruido en la medicion.
J. Ramrez y E. Rosero 201 GICI
5.2. DISE
NO DEL OBSERVADOR
Error inicial en X2
(velocidad)
Error inicial en X1
(posicion)=0
X
1P
X
2C
X
1C
X
2P
} 1
-1
0.5 1
0
Figura 5.5: Respuesta de los Observadores Predictor y Corriente.
Observador Corriente:
Ubicando los polos tambien en z = 0,4 j0,4.
det[zIG+K
o
CG)] = det
_
_
z 0
0 z
_
_
1 0,1
0 1
_
+
_
k
1
k
2
_
_
1 0
_
1 0,1
0 1
_
_
z
2
+ (k
1
+ 0,1k
2
2)z + 1 k
1
= z
2
0,8z + 0,32
k
1
= 0,68 ; k
2
= 5,2
Para implementar las ecuaciones del observador:
V (k) =
_
1 0,1
0 1
_
X (k 1) +
_
0,005
0,1
_
u(k 1)
X(k) = V (k) +
_
0,68
5,2
_
[Y (k) [1 0] V (k)]
de forma que se reduzca el tiempo de calculo al m aximo, se calcula antes
del muestreo:
v
1
(k) = x
1
(k 1) + 0,1 x
2
(k 1) + 0,005 u(k 1)
v
2
(k) = x
2
(k 1) + 0,1 u(k 1)
x
1
= (1 0,68) v
1
(k)
J. Ramrez y E. Rosero 202 GICI
5.2. DISE
NO DEL OBSERVADOR
x
2
= ( 5,2) v
1
(k) + v
2
(k)
En las dos ultimas ecuaciones se ha calculado el termino:
X
(k) = V (k)
_
k
1
k
2
_
[1 0]V (k) de la ecuaci on de correcci on de esti-
maci on del observador.
Despu es de muestrear el valor de y(k), se calcula:
x
1
(k) = x
1
+ 0,68 y(k); x
2
(k) = x
2
+ 5,2 y(k) (5.2)
Luego se calculara el control u(k). Como se puede observar en la gura
5.5, la respuesta del observador corriente es un muestreo mas r apida que la
del predictor.
Si el tiempo de calculo de ( ecuacion 5.2) es elevado hay un retardo no
considerado en el dise no, el cual puede incrementar el amortiguamiento
con relaci on a los polos dise nados; en tal caso, se deben reubicar los polos
deseados del observador o bien incluir el retardo de tiempo de calculo en el
modelo del sistema.
5.2.8. Efecto del Observador en el Lazo Cerrado
Veamos el efecto de tomar el estado estimado
X(k) en lugar de X(k) en la ley
de control, sobre el desempeno de todo el sistema en red cerrada.
Si el sistema: X (k + 1) = G X(k) + H U(k); Y (k) = C X(k)
Se realimenta mediante: U(k) = K
c
X (k)
X (k + 1) = G X(k) H K
c
X (k)
= (G H K
c
) X (k) + H K
c
[ X (k)
X (k) ]
Para el observador predictor se obtuvo: e (k + 1) = (G K
o
C) e (k),
donde e (k) = X (k)
X (k).
La combinaci on de estas dos ecuaciones acopladas da la dinamica completa de
J. Ramrez y E. Rosero 203 GICI
5.3. DISE
NO DE SERVOSISTEMAS
la planta + ley de control + observador:
_
X
(
k + 1)
e
(
k + 1)
_
=
_
G H K
c
H K
c
0 G K
o
C
_ _
X(k)
e(k)
_
La ecuaci on caracterstica es:
det
_
_
zI (G HK
c
) HK
c
0 zI [GK
o
C]
_
_
= det
_
[zI (G HK
c
)][zI (GK
o
C)]
_
La ecuaci on caracterstica es:
c
(z)
o
(z) = 0
Esto se conoce como el Principio de Separaci on: la din amica total es la suma de la
din amica del control con la dinamica del observador y es lo que permite el diseno
independiente de la observacion y el control.
5.3. Dise no de Servosistemas
En los apartados anteriores se resolvio el problema del observador donde no
hay entradas de comandos; en los servosistemas el objetivo es seguir lo mejor
posible una entrada variante; en estos casos (tambien aplica al regulador), para
eliminar el error permanente, se introduce un integrador despues de la diferencia
entre el comando r(k) y la salida y(k):
K
1
z
1
I
H Z
1
I C
G
K
2
r(k)
V (k 1)
V (k) U(k) X(k) Y (k)
Se asume que la planta es de estado compleamente controlable y observable;
las ecuaciones dinamicas de la planta son:
X(k + 1) = GX(k) +HU(k) (5.3)
J. Ramrez y E. Rosero 204 GICI
5.3. DISE
NO DE SERVOSISTEMAS
Y (k) = CX(k) (5.4)
con n estados, mentradas, msalidas. La ecuaci on de estado del integrador es:
V (k) = V (k 1) +r(k) Y (k)
donde V : vector de error actuante (orden m), r: vector de entradas de comando.
La ecuaci on se puede reescribir:
V (k + 1) = V (k) +r(k + 1) Y (k + 1)
V (k + 1) = V (k) +V (k + 1) C[GX(k) +HU(k)]
V (k + 1) = CGX(k) +V (k) CHU(k) +r(k + 1)
El vector de control U(k) es:
U(k) = K
2
X(k) +K
1
V (k)
K
1
, K
2
: matrices de parametros de dise no.
U(k + 1) = K
2
X(k + 1) +K
1
V (k + 1)
U(k+1) = K
2
GX(k)K
2
HU(k)K
1
CGX(k)+K
1
V (k)K
1
CHU(k)+K
1
r(k+1)
Reemplazando en esta ecuacion: K
1
V (k) = U(k) +K
2
X(k), se obtiene:
U(k+1) = (K
2
K
2
GK
1
CG)X(k)+(I
m
K
2
HK
1
CH)U(k)+K
1
r(k+1)
Como U(k) es una combinaci on lineal de los vectores de estado X(k) y V (k),
entonces se puede denir el nuevo vector de estado con X(k) y U(k):
_
X(k + 1)
U(k + 1)
_
=
Ar
..
_
G H
K
2
K
2
G K
1
CG I
m
K
2
H K
1
CH
_ _
X(k)
U(k)
_
+
_
0
K
1
_
r(k + 1)
La ecuaci on de salida es:
Y (k)
_
C 0
_
X(k)
U(k)
_
J. Ramrez y E. Rosero 205 GICI
5.3. DISE
NO DE SERVOSISTEMAS
En este modelo de estado, se puede aplicar la tecnica de ubicacion de polos; si
r(k) es un escal on r(k) = r entonces:
_
X(k + 1)
U(k + 1)
_
= A
r
_
X(k)
U(k)
_
+
_
0
K
1
r
_
En estado estable, por la accion integral: Y () = r, se obtiene:
_
X()
U()
_
= A
r
_
X()
U()
_
+
_
0
K
1
r
_
Deniendo los vectores de error:
X
e
(k) = X(k) X() y V
e
(k) = U(k) U(), se obtiene:
_
X
e
(k + 1)
U
e
(k + 1)
_
= A
r
_
X
e
(k)
U
e
(k)
_
que equivale a:
_
X
e
(k + 1)
U
e
(k + 1)
_
=
_
G H
0 0
_ _
X
e
(k)
U
e
(k)
_
+
_
0
I
m
_
W(k)
Donde:
W(k)
_
K
2
K
2
GK
1
CG : I
m
K
2
H K
1
CH
_
X
e
(k)
U
e
(k)
_
Deniendo:
X
_
X
e
(k)
U
e
(k)
_
(m+n)
G
_
G H
0 0
_
(n+m)m
H
_
0
I
m
_
(n+m)m
K
_
K
2
K
2
G K
1
CG : I
m
K
2
H K
1
CH
m(n+m)
Se obtiene:
X(k + 1) =
G
X(k) +
HW(k)
J. Ramrez y E. Rosero 206 GICI
5.3. DISE
NO DE SERVOSISTEMAS
W(k) =
K
X(k)
La matriz de controlabilidad es:
M
_
H :
G
H : ... :
G
n+m1
H
(n+m)m(n+m)
cuyo rango es n + m, luego el sistema es completamente controlable; se puede
probar (ver [Ogata [1998]]) que una vez calculada
K, K
1
y K
2
se obtienen de:
_
K
2
: K
1
=
_
K + [0 : I
m
]
_
GI
n
H
CG CH
_
1
Ejemplo
Para la planta
Y (z)
U(z)
=
z
2
+ 0,5z
3
1 z
1
+ 0,01z
2
+ 0,12z
3
se desea determinar K
1
y K
2
, bajo la estructura planteada, para obtener una res-
puesta deadbeat.
La representaci on de estado en la forma canonica controlable es:
_
_
x
1
(k + 1)
x
2
(k + 1)
x
3
(k + 1)
_
_
_
_
0 1 0
0 0 1
0,12 0,01 1
_
_
_
_
x
1
(k)
x
2
(k)
x
3
(k)
_
_
+
_
_
0
0
1
_
_
u(k)
y(k) =
_
0,5 1 0
_
_
x
1
(k)
x
2
(k)
x
3
(k)
_
_
El sistema en lazo cerrado tiene:
G
_
G H
0 0
_
_
_
0 1 0 : 0
0 0 1 : 0
0,12 0,01 1 : 1
.. .. .. : ..
0 0 0 : 0
_
H
_
_
0
0
0
..
1
_
_
J. Ramrez y E. Rosero 207 GICI
5.3. DISE
NO DE SERVOSISTEMAS
La ecuaci on caracterstica deseada es: z
4
= 0. Con la f ormula de Ackermann se
tiene:
K
_
0 0 0 1
_
H
G
H
G
2
H
G
3
H
G
4
K
_
0 0 0 1
_
0 0 0 1
0 0 1 1
0 1 1 0,99
1 0 0 0
_
_
1
_
_
0 1 0 0
0 0 1 0
0,12 0,01 1 1
0 0 0 0
_
_
4
=
_
0,12 0,13 0,99 1
Finalmente:
_
K
2
K
1
_
K + [0 : 1]
_
GI
3
H
CG CH
_
1
_
K
2
K
1
_
0,12 0,13 0,99 : 2
_
1 1 0 : 0
0 1 1 : 0
0,12 0,01 0 : 1
.. .. .. : ..
0 0,5 1 : 0
_
_
1
_
K
2
: K
1
_
0,12 0,323 2 : 0,66
Por lo tanto:
k
1
= 0,66
K
2
=
_
0,12 0,323 2
Ejercicios propuestos
Control por realimentacion de estados
Para:
X(k + 1) = GX(k) +HU(k)
Y (k) = CX(k)
U(k) = K
c
X(k)
1. Con
G =
_
1 1
0 1
_
J. Ramrez y E. Rosero 208 GICI
5.3. DISE
NO DE SERVOSISTEMAS
H =
_
1
2
1
_
C =
_
1 0
Calcule K
c
para obtener polos de red cerrada en z = 0,1 j0,1.
Obtenga las ecuaciones del observador predictor y corriente para polos
deseados en z = 0,6 J0,3
2. Con
G =
_
1 T
0 1
_
H =
_
T
2
2
T
_
Calcule la transformacion T, tal que si X = TX las ecuaciones en X estan
en la forma can onica controlable; calcule K para obtener una ecuacion car-
acterstica
c
(z) = z
2
1,6z +0,7. Si se aplica el control u = KX, calcule
la K correspondiente con X como estado.
3. Con
G =
_
1 1
0 1
_
H =
_
1
2
1
_
Verique si el sistema es observable para:
a)
C =
_
0 1
b)
C =
_
1 0
por que hay p erdida de la observabilidad?
4. Para el sistema de la gura, calcule k
1
y k
2
de forma que la respuesta a un
escal on en r(k), sea con oscilaciones muertas (deadbeat).
J. Ramrez y E. Rosero 209 GICI
5.3. DISE
NO DE SERVOSISTEMAS
k
1
z
1
Z
1
0.5
k
2
r(k)
Y (k)
Resumen
En este captulo se analiz o la controlabilidad y la observabilidad de los sis-
temas de control lineales e invariantes en el tiempo. Se revisaron las transfor-
maciones utiles para el analisis y dise no en el espacio de estados; como metodo
b asicos de dise no en el espacio de estados, se presento el m etodo de ubicaci on de
polos, asumiendo que todas las variables de estado se pueden medir. Se realizo el
dise no de los observadores de estado, que estiman las variables que no son medi-
bles; su estimaci on se basa en las mediciones de las senales de salida y de control
de la planta. Al nal se analizo y se dise n o un control con acci on integral para los
sistemas de control de seguimiento de referencia.
Actividades de aprendizaje
1. Realice:
Una lectura reexiva y crtica del material del curso.
2. Desarrolle los ejercicios propuestos de este captulo.
3. Para el sistema:
x
1
(k + 1) = x
1
(k) +x
2
(k) u(k)
x
2
(k + 1) = x
2
(k) +u(k)
y(k) = x
1
(k)
u: entrada; y: salida; x
1
, x
2
: estados
J. Ramrez y E. Rosero 210 GICI
5.3. DISE
NO DE SERVOSISTEMAS
Verique que el sistema es controlable y/o observable.
Dise ne una ley de realimentacion de estados de forma que el sistema
tenga una din amica en lazo cerrado, de respuesta con oscilaciones
muertas.
4. (Evaluaci on de Enero 24 de 2003) Para el sistema de la gura 5.6:
+
-
r(k)
+
+
z
1
k
1
+
-
+
+
z
1
0.5
k
c2
k
c1
+
+
z
1
0.5
+
+
u(k)
x
2
(k)
x
1
(k) = y(k)
Planta
Figura 5.6: Sistema de control digital de seguimiento.
La representaci on de estado de la planta es:
x(k + 1) =
_
0,5 1
0 0,5
_
x(k) +
_
0
1
_
u(k)
y(k) =
_
1 0
x(k)
con
x(k) =
_
x
1
(k)
x
2
(k)
_
Determine la ganancia de la trayectoria directa k
1
y las ganancias de
realimentaci on k
c1
, k
c2
, de forma que la respuesta a una secuencia es-
cal on unitario en r(k) sea con oscilaciones muertas.
J. Ramrez y E. Rosero 211 GICI
5.3. DISE
NO DE SERVOSISTEMAS
Si x
2
(k) no es medible, se requiere usar un observador para la reali-
mentaci on de estados; obtenga las ecuaciones de un observador pre-
dictor, de forma que la respuesta al error de observacion inicial, sea
con oscilaciones muertas.
Lecturas complementarias
OGATA KATSUSHITO, Sistemas de Control en Tiempo Discreto. P.H.H,
M ex. 1996. Captulo 5: an alisis en el espacio de estado y captulo 6: an alisis
y dise no en el espacio de estado.
Referencias
KUO BENJAMIN, Sistemas de Control Autom atico, Prentice Hall 1997.
OGATA KATSUSHITO, Ingenier a de Control Moderno, P.H.H. 3 edicion,
1998.
OGATA KATSUSHITO, Sistemas de Control en Tiempo Discreto. P.H.H,
M ex. 1996.
J. Ramrez y E. Rosero 212 GICI
Bibliografa
R. Dorf. Sistemas Modernos de Control. Addison Wesley Iberoamericana, 2da.
Edici on, 1989.
Benjamin. Kuo. Sistemas de Control Autom atico. Prentice Hall-
Hispanoamericana, 1996.
K. Ogata. Ingeniera de Control Moderna. Prentice Hall Hispanoamericana, 3a.
Edici on, 1998.
213
You might also like
- Prácticas de Laboratorio de Sistemas de Control Avanzado PDFDocument38 pagesPrácticas de Laboratorio de Sistemas de Control Avanzado PDFEduardohrdz HernandezNo ratings yet
- Manual de WinCC Flexible 2008Document33 pagesManual de WinCC Flexible 2008nathan_allgrenNo ratings yet
- Analisis Temporal y Estabilidad MatlabDocument7 pagesAnalisis Temporal y Estabilidad MatlabJulian AvilaNo ratings yet
- Curso PidDocument39 pagesCurso PidJesus Enrique Alfonzo RiveroNo ratings yet
- Control P.D: Sp≤4.32%, Ts≤4sDocument2 pagesControl P.D: Sp≤4.32%, Ts≤4ssamirpcNo ratings yet
- 1 Sistemas de Control en Tiempo Discreto 2a Ed - Katsuhiko OgataDocument757 pages1 Sistemas de Control en Tiempo Discreto 2a Ed - Katsuhiko OgataAlexandra RomeroNo ratings yet
- Teoria de Control Electronico 2Document11 pagesTeoria de Control Electronico 2Juan Pablo García Flores100% (1)
- Sistema Ball and Beam Modelado y Simulación PresentacionDocument18 pagesSistema Ball and Beam Modelado y Simulación PresentacionGregory Cárdenas-MansillaNo ratings yet
- Acondicionadores de Señal PDFDocument58 pagesAcondicionadores de Señal PDFSthefaniia Garzon OliiverosNo ratings yet
- Presentación 1.1 - Introduccion Sistemas de Control DigitalDocument26 pagesPresentación 1.1 - Introduccion Sistemas de Control DigitalKady Gisselle GomézNo ratings yet
- Informe Control Digital Control de VelocidadDocument14 pagesInforme Control Digital Control de VelocidadMarcelo Alejandro Alvarez LunaNo ratings yet
- Asignacion de PolosDocument12 pagesAsignacion de PolosMarlon Avila TarrilloNo ratings yet
- Proyectos de LabviewDocument80 pagesProyectos de LabviewalexyaniNo ratings yet
- Examenes Rae 0708Document40 pagesExamenes Rae 0708Milton Fonseca ZuritaNo ratings yet
- Control PID Un Enfoque DescriptivoDocument46 pagesControl PID Un Enfoque Descriptivodeja_vu82460No ratings yet
- SINTONIZAcion Ziegler NicholsDocument13 pagesSINTONIZAcion Ziegler NicholsAnonymous YDxuBwNo ratings yet
- Diseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.Document12 pagesDiseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.hhryc7100% (3)
- Logica Difusa - ToolboxDocument9 pagesLogica Difusa - ToolboxEdwin Ivan Arismendi RiveraNo ratings yet
- El Lugar Geométrico de Las Raíces Es Un Poderoso Método de Análisis y Diseño para La Estabilidad y Respuesta Transitoria de Un Sistema de ControlDocument2 pagesEl Lugar Geométrico de Las Raíces Es Un Poderoso Método de Análisis y Diseño para La Estabilidad y Respuesta Transitoria de Un Sistema de Controljavierone xporNo ratings yet
- Clase 1 - Intro Matlab PDFDocument61 pagesClase 1 - Intro Matlab PDFMateo Felipe Ramirez ArbelaezNo ratings yet
- 3 - Perceptron Multicapa PDFDocument18 pages3 - Perceptron Multicapa PDFDiego J RubioNo ratings yet
- Curso de PLCDocument29 pagesCurso de PLCRolandito Anchapuri CNo ratings yet
- Diseño lógica secuencial GRAFCETDocument30 pagesDiseño lógica secuencial GRAFCETrockbertovgNo ratings yet
- Control PI-Fuzzy BienDocument10 pagesControl PI-Fuzzy Bienivette chikisNo ratings yet
- Diseno de Un PID para Control de VelocidadDocument38 pagesDiseno de Un PID para Control de VelocidadMario Vasquez A.No ratings yet
- Unit 2 - Clasificacion Por Estructura PLCDocument26 pagesUnit 2 - Clasificacion Por Estructura PLCJaret GarciaNo ratings yet
- Dinámica de Sistemas y Control Masa, Resorte AmortiguadorDocument17 pagesDinámica de Sistemas y Control Masa, Resorte AmortiguadorOmar LSNo ratings yet
- Cuadernillo de Control Digital ITSMotulDocument65 pagesCuadernillo de Control Digital ITSMotulSean EllisNo ratings yet
- Modelado Matemático de Sistemas FísicosDocument44 pagesModelado Matemático de Sistemas FísicosRicardoSntiagoNo ratings yet
- Métodos de Sintonización de ControladoresDocument8 pagesMétodos de Sintonización de Controladoreskevintk15No ratings yet
- Diseño de Lazoz Pid Por Polos y CerosDocument19 pagesDiseño de Lazoz Pid Por Polos y Cerosavengers vengadorNo ratings yet
- Paper Articulo Automatisa 2015 Submission 22 Automatización de Una Torre de Destilación en Una Planta de Operaciones Unitarias.Document5 pagesPaper Articulo Automatisa 2015 Submission 22 Automatización de Una Torre de Destilación en Una Planta de Operaciones Unitarias.CM35No ratings yet
- Control Predictivo MPC de un sistema de doble integradorDocument5 pagesControl Predictivo MPC de un sistema de doble integradorROGER EDIBERTO LLOCLLA ESCOBARNo ratings yet
- Tesis PLCDocument100 pagesTesis PLCArmando Alcalá100% (1)
- Selectividad 3Document24 pagesSelectividad 3robert_rjcNo ratings yet
- Control basado en pasividad: una introducciónDocument32 pagesControl basado en pasividad: una introducciónRaul Roque Yujra100% (2)
- Compensación RF usando métodos de respuesta en frecuenciaDocument12 pagesCompensación RF usando métodos de respuesta en frecuenciaMatias Gabriel TurinNo ratings yet
- Controlador PIDDocument9 pagesControlador PIDIsmael PeñaNo ratings yet
- Control de posición con PID y motor de CDDocument43 pagesControl de posición con PID y motor de CDA Omar RodriguezNo ratings yet
- Reconocimiento de Imágenes Con Redes NeuronalesDocument5 pagesReconocimiento de Imágenes Con Redes NeuronalesDannyLópezNo ratings yet
- 05 - Respuesta en El Tiempo de Un Sistema de Control ELTDocument19 pages05 - Respuesta en El Tiempo de Un Sistema de Control ELTanderdaNo ratings yet
- Respuesta TemporalDocument56 pagesRespuesta TemporalFrank Luis Pérez ÁlvarezNo ratings yet
- Teoria de Control Electronico. HOSTETTERDocument378 pagesTeoria de Control Electronico. HOSTETTERJeremiah MartinezNo ratings yet
- Guia Practica 3 S7-1200 VirtualDocument3 pagesGuia Practica 3 S7-1200 VirtualErwin RojasNo ratings yet
- Sistemas de Control IIDocument214 pagesSistemas de Control IIChristian Camilo MoralesNo ratings yet
- Apuntes Ingenieria Control Cuarto IngenieroIndustrialDocument300 pagesApuntes Ingenieria Control Cuarto IngenieroIndustrialpepe juanNo ratings yet
- Apuntes Ingenieria Control Cuarto IngenieroIndustrial PDFDocument300 pagesApuntes Ingenieria Control Cuarto IngenieroIndustrial PDFoscar100% (1)
- Notas de Clase Control PDFDocument155 pagesNotas de Clase Control PDFsergiopuyo9184No ratings yet
- Ldesc2e PDFDocument318 pagesLdesc2e PDFCR RaulNo ratings yet
- Teoría de control análogoDocument301 pagesTeoría de control análogoArmandoAguirre100% (1)
- Sistemas de Control IDocument226 pagesSistemas de Control IChristian Camilo Morales100% (1)
- Control de Proceso SV 10Document314 pagesControl de Proceso SV 10Andrea del Pilar Obeso TantapomaNo ratings yet
- Notas de ControlDocument283 pagesNotas de ControlManuelete1994No ratings yet
- Control de Procesos 2019Document158 pagesControl de Procesos 2019aaaa aaaaNo ratings yet
- Control de ProcesoDocument262 pagesControl de ProcesoMauricio Mallma100% (1)
- Control de Sistemas DiscretosDocument174 pagesControl de Sistemas Discretosflores floresNo ratings yet
- ControlDeProcesosV10 Arturo RojasDocument314 pagesControlDeProcesosV10 Arturo RojasZeroNo ratings yet
- Ramirez J. - Sistemas de Control IDocument226 pagesRamirez J. - Sistemas de Control IAndrés F ArciniegasNo ratings yet
- Notas Clase Sistema de Control 1 PDFDocument226 pagesNotas Clase Sistema de Control 1 PDFcristian_carvajal_5100% (1)
- Guia Ilac g24 2007 OhaDocument3 pagesGuia Ilac g24 2007 OhaAlex GuevaraNo ratings yet
- Taller de ProbabilidadDocument2 pagesTaller de ProbabilidadAlex GuevaraNo ratings yet
- PENSEE WebManual Spa-00 20171221.0Document53 pagesPENSEE WebManual Spa-00 20171221.0Alex GuevaraNo ratings yet
- Guia Ilac g24 2007 Oha-Intervalos de Calibración Inst. MediciónDocument13 pagesGuia Ilac g24 2007 Oha-Intervalos de Calibración Inst. MediciónIsmael Morales Puente100% (1)
- Manual Instalación Herramientas Sistemas EmbebidosDocument29 pagesManual Instalación Herramientas Sistemas EmbebidosJean Briham Pardo BaqueroNo ratings yet
- Diseño y Construcción de Un Gaussimetro PDFDocument9 pagesDiseño y Construcción de Un Gaussimetro PDFcharwins100% (1)
- Hoja Datos Pce MFM 3000 v2 - 854531Document2 pagesHoja Datos Pce MFM 3000 v2 - 854531Alex GuevaraNo ratings yet
- Introducción a la Evaluación del RiesgoDocument12 pagesIntroducción a la Evaluación del RiesgoJohn BedoyaNo ratings yet
- ILAC Guia de Intervalos de Calibración PDFDocument3 pagesILAC Guia de Intervalos de Calibración PDFJuan Camilo PachiNo ratings yet
- Guia EMCDocument76 pagesGuia EMCTull Riaño FernándezNo ratings yet
- Compatibilidad Electromagnetica ExplicacionDocument78 pagesCompatibilidad Electromagnetica ExplicacionKazu Ueji MonterrubioNo ratings yet
- Cdio PDFDocument27 pagesCdio PDFAlex GuevaraNo ratings yet
- Interferencia Electromagnetica en Equipos MedicosDocument11 pagesInterferencia Electromagnetica en Equipos MedicosherbertamayaNo ratings yet
- Cdio PDFDocument27 pagesCdio PDFAlex GuevaraNo ratings yet
- Prac Lab ELPO UNAL - 2015 01 PDFDocument21 pagesPrac Lab ELPO UNAL - 2015 01 PDFAlex GuevaraNo ratings yet
- 3-2 Circuitos DisparoDocument28 pages3-2 Circuitos DisparoAdrian BedollaNo ratings yet
- Info 3 PotenciaDocument14 pagesInfo 3 PotenciaAlex GuevaraNo ratings yet
- Como Instalar Ubuntu 1004 2Document40 pagesComo Instalar Ubuntu 1004 2Carolina ParraNo ratings yet
- Práctica 1Document8 pagesPráctica 1Alex GuevaraNo ratings yet
- Guía OrcadDocument19 pagesGuía OrcadAlex GuevaraNo ratings yet
- Informe Práctica # 2Document4 pagesInforme Práctica # 2Alex GuevaraNo ratings yet
- Manual Cas CXDocument708 pagesManual Cas CXIrisDmedia Cuerda100% (2)
- Norma INV E-302-07Document13 pagesNorma INV E-302-07Jorge Luis Trujillo VanegasNo ratings yet
- Distancia Entre Dos PuntosDocument11 pagesDistancia Entre Dos PuntosNevy Alvarez TinajeroNo ratings yet
- HERRAMIENTAS INTERACTIVA AficheDocument16 pagesHERRAMIENTAS INTERACTIVA Aficherubisabel_00No ratings yet
- Ejercicio Clase #11.xlsxpractica en ClaseDocument105 pagesEjercicio Clase #11.xlsxpractica en ClaseDARIO RIVASNo ratings yet
- AREASDocument5 pagesAREASlilisabepachecoNo ratings yet
- ConsecuenciaDocument6 pagesConsecuenciaAlvaro M. ApazaNo ratings yet
- Superposición e Interferencia de OndasDocument3 pagesSuperposición e Interferencia de OndasGerson Chavez Vasquez100% (2)
- E Práctica#2Document10 pagesE Práctica#2Sofia Coppiano GarciaNo ratings yet
- ProblemasDocument7 pagesProblemasJoseph Sucso BenavidesNo ratings yet
- S9-Metalografia Por ReplicaDocument56 pagesS9-Metalografia Por ReplicaJose JoseNo ratings yet
- Centrifugation Operating-Manual Centrifuge-5425Document70 pagesCentrifugation Operating-Manual Centrifuge-5425Sofia GonzalezNo ratings yet
- Problemas de Progresiones Aritmeticas y GeometricasDocument3 pagesProblemas de Progresiones Aritmeticas y Geometricastheundertaker00100% (1)
- 1020149863Document179 pages1020149863fernando1018No ratings yet
- CONALEP Curso Mantenimiento de Sistemas de Aire Acondicionado AutomotrizDocument221 pagesCONALEP Curso Mantenimiento de Sistemas de Aire Acondicionado AutomotrizNiss MkiNo ratings yet
- Practica PandeoDocument4 pagesPractica PandeoMar RodriguezNo ratings yet
- DATOS Tabla Periodica DEFINITVADocument7 pagesDATOS Tabla Periodica DEFINITVAGerardo Gabriel Calderas CortésNo ratings yet
- 12-Jul. 2013 Cálculo de Dimensiones de ESPESADORESA-RLV y CC 850TMSDDocument19 pages12-Jul. 2013 Cálculo de Dimensiones de ESPESADORESA-RLV y CC 850TMSDMax Alva SolisNo ratings yet
- Cuestionario S7Document3 pagesCuestionario S7Victor Daniel Rascon MarquezNo ratings yet
- Cap 4 Fluidos de PerforaciónDocument38 pagesCap 4 Fluidos de PerforaciónXavoerNo ratings yet
- Manual Bioquímica I 2018Document41 pagesManual Bioquímica I 2018MELANY ELIZABETH MONROY CRUZNo ratings yet
- Diagrama de Conexion Puntos Calientes Logo Seidorf OKDocument1 pageDiagrama de Conexion Puntos Calientes Logo Seidorf OKFernando TamayoNo ratings yet
- Sem 1 - Programacion Lineal EnteraDocument57 pagesSem 1 - Programacion Lineal EnteraMaykol ChávezNo ratings yet
- Matrices - Sistema ecuacionesDocument3 pagesMatrices - Sistema ecuacionesNilia Robles RamirezNo ratings yet
- Dossier Informativo MATEMATICAS 2017 PDFDocument16 pagesDossier Informativo MATEMATICAS 2017 PDFviromNo ratings yet
- CONEXION EN PARALELO de Transformadores TrifasiosDocument5 pagesCONEXION EN PARALELO de Transformadores TrifasiosJohanna Belen Pilco DominguezNo ratings yet
- Características de Huawei Y7Document6 pagesCaracterísticas de Huawei Y7Kevin Alef Enciso GomesNo ratings yet
- Números enteros y operaciones: Trabajo práctico N° 5Document4 pagesNúmeros enteros y operaciones: Trabajo práctico N° 5Luis LopezNo ratings yet
- Circuito SerieDocument7 pagesCircuito Seriemonicaliliana100% (4)
- La Circulación y TransporteDocument22 pagesLa Circulación y TransporteMelany Paola Mancilla BerrocalNo ratings yet
- Ejercicios de OperacionesDocument6 pagesEjercicios de OperacionesVALENTINA MONA PEREA100% (1)