You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 1 Chapter1 Introduction V5.5a1Document13 pages1 Chapter1 Introduction V5.5a1Alejandro LaraNo ratings yet
- Tank TacticsDocument241 pagesTank TacticsSlobodan Petrovic100% (1)
- Coomaraswamy, SarpabandhaDocument3 pagesCoomaraswamy, SarpabandhakamakarmaNo ratings yet
- Lector: Aleksandar Karamfilov Skype: Sanders - Kar E-Mail: Aleksandar - Karamfilov@Pragmatic - BG Linkedin: 2013 - 2014Document19 pagesLector: Aleksandar Karamfilov Skype: Sanders - Kar E-Mail: Aleksandar - Karamfilov@Pragmatic - BG Linkedin: 2013 - 2014Diana DikovaNo ratings yet
- 2501 Solid Drawn Copper Tubes For General Engineering PurposesDocument8 pages2501 Solid Drawn Copper Tubes For General Engineering PurposesKaushik SenguptaNo ratings yet
- The Impact of Internet Use For StudentsDocument8 pagesThe Impact of Internet Use For StudentsCharlesNo ratings yet
- RS232STATUSMONDocument1 pageRS232STATUSMONashish.boradNo ratings yet
- Lab 7Document12 pagesLab 7api-25252422380% (5)
- d350 Taper Lock End Anchor Tech Data SheetDocument2 pagesd350 Taper Lock End Anchor Tech Data SheetEdsantadNo ratings yet
- View/Update Profile Apply For STC: Upload Sponsorship STC Applied Download Certificate Change PasswordDocument2 pagesView/Update Profile Apply For STC: Upload Sponsorship STC Applied Download Certificate Change PasswordlakshmilavanyaNo ratings yet
- Brochure A35g A40g t4f en 22 20050840 DDocument20 pagesBrochure A35g A40g t4f en 22 20050840 DRengga PratamaNo ratings yet
- Oracle Secure BackupDocument294 pagesOracle Secure BackupCarlos ValderramaNo ratings yet
- Surge Arresters PP 7Document9 pagesSurge Arresters PP 7gabriela69sNo ratings yet
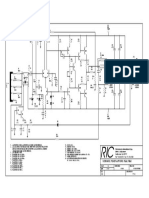
- Ric RG90 y RG60Document1 pageRic RG90 y RG60GabrielConsentidoNo ratings yet
- ASSA ABLOY - Digital Cam LocksDocument12 pagesASSA ABLOY - Digital Cam LocksSales Project 2 VCPNo ratings yet
- Sixthsense: - Sanjana Sukumar 3Rd YearDocument2 pagesSixthsense: - Sanjana Sukumar 3Rd YearSanjana SukumarNo ratings yet
- HTTP Download - Yamaha.com API Asset File Language En&site Au - YamahaDocument5 pagesHTTP Download - Yamaha.com API Asset File Language En&site Au - Yamahaericwc123456No ratings yet
- INDUSTRIAL LUBRICANTS-misr Petroleum PDFDocument17 pagesINDUSTRIAL LUBRICANTS-misr Petroleum PDFIslam FawzyNo ratings yet
- DH Xvr4b16Document3 pagesDH Xvr4b16Jumar JumadiaoNo ratings yet
- Bill of Materials SampleDocument31 pagesBill of Materials SampleOcsi YeahNo ratings yet
- p20 PDFDocument12 pagesp20 PDFpraphul gamangoNo ratings yet
- Standards For Rolling Stock CablesDocument9 pagesStandards For Rolling Stock CablesNathathonNo ratings yet
- ProductBrochure A35F A40F en 30A1006561Document24 pagesProductBrochure A35F A40F en 30A1006561Ji UvexNo ratings yet
- Dr. Ambedkar Institute of Technology: Mandatory Non-Credit NSS Course (22NSN310) Bachelor of Engineering inDocument4 pagesDr. Ambedkar Institute of Technology: Mandatory Non-Credit NSS Course (22NSN310) Bachelor of Engineering inshamalac2004No ratings yet
- Sports Collection CatalogueDocument31 pagesSports Collection CataloguesitarazmiNo ratings yet
- Documents - The New Ostpolitik and German-German Relations: Permanent LegationsDocument5 pagesDocuments - The New Ostpolitik and German-German Relations: Permanent LegationsKhairun Nisa JNo ratings yet
- Product Responsibilities in RA 03-2017Document2 pagesProduct Responsibilities in RA 03-2017claudedNo ratings yet
- Java - Informatica Scenario Based Interview Questions (Convert Columns Into Rows)Document6 pagesJava - Informatica Scenario Based Interview Questions (Convert Columns Into Rows)Sri Kanth SriNo ratings yet
- Bhopal Gas TragedyDocument25 pagesBhopal Gas TragedyHarry AroraNo ratings yet
- The Role of Social Media and Its Implication On Economic Growth On Society in IndiaDocument3 pagesThe Role of Social Media and Its Implication On Economic Growth On Society in IndiaSara EmamiNo ratings yet