You might also like
- Using Modbus With Mach3Document14 pagesUsing Modbus With Mach3rafaeldesouzamartinsNo ratings yet
- Biesse Rover Gold 1232 - 2013 - enDocument9 pagesBiesse Rover Gold 1232 - 2013 - enetors11No ratings yet
- Mach3 JoyPad Plugin User ManualDocument18 pagesMach3 JoyPad Plugin User ManualnelusabieNo ratings yet
- AXBB E ManualDocument29 pagesAXBB E ManualKenny HebertNo ratings yet
- User Manual-MACH3-MKX-V1.0Document40 pagesUser Manual-MACH3-MKX-V1.0Daniel NituNo ratings yet
- Telxon Symbol PTC 960xDocument74 pagesTelxon Symbol PTC 960xEube BoxNo ratings yet
- Design and Analysis Mini CNC Plotter Machine: Faculty of Engineering Department of Computer EngineeringDocument46 pagesDesign and Analysis Mini CNC Plotter Machine: Faculty of Engineering Department of Computer EngineeringOmar S. ArabiyatNo ratings yet
- PluginTutorial V01Document92 pagesPluginTutorial V01Vincenzo PaternòNo ratings yet
- Setting Up Your Tool ChangerDocument16 pagesSetting Up Your Tool ChangerSenad GluhačevićNo ratings yet
- Ermaksan Epl-PlasmaDocument19 pagesErmaksan Epl-PlasmaMurat KayaNo ratings yet
- CNC Plasma Torch ConstructionDocument2 pagesCNC Plasma Torch ConstructionMariane MottaNo ratings yet
- Aqua Flo XP Series Pump Components p234Document1 pageAqua Flo XP Series Pump Components p234agent6512No ratings yet
- Mach3 Software Installation GuideDocument9 pagesMach3 Software Installation Guidegabrieldromano1No ratings yet
- G100 Set Up Guide Rev.1 9-19-07Document34 pagesG100 Set Up Guide Rev.1 9-19-07Milton MarinNo ratings yet
- 5AXISMAKER Gcode Generator Manual V0.1 2Document17 pages5AXISMAKER Gcode Generator Manual V0.1 2widyaNo ratings yet
- M330VF Combination Lathe Mill Machine MAXNOVODocument3 pagesM330VF Combination Lathe Mill Machine MAXNOVOHeryanto SyamNo ratings yet
- EC300 User Manual V2-NvcncDocument24 pagesEC300 User Manual V2-NvcncJacpro Automation SacNo ratings yet
- Probe Mach3Document1 pageProbe Mach3Paulo TeixeiraNo ratings yet
- Mach3 VBDocument9 pagesMach3 VBjavedpakNo ratings yet
- CNC Usb ControllerDocument153 pagesCNC Usb ControllerValentin Banica0% (1)
- Developer's Quick Start Manual: Power PMAC-NC16Document30 pagesDeveloper's Quick Start Manual: Power PMAC-NC16ИгорьNo ratings yet
- Eurotech B700 SeriesDocument4 pagesEurotech B700 SeriesCNC SYSTEMSNo ratings yet
- 1361 Robot Arm PDFDocument82 pages1361 Robot Arm PDFMahayudin SaadNo ratings yet
- Tehnoloski Podaci Za Glodanje Na Emco Mill 55Document5 pagesTehnoloski Podaci Za Glodanje Na Emco Mill 55programiranjecncNo ratings yet
- CNC by SourabhDocument7 pagesCNC by SourabhsaurabhNo ratings yet
- CNC Controller RZNC 0901 User Manual RuDocument34 pagesCNC Controller RZNC 0901 User Manual RuEmill CncNo ratings yet
- ST-V2 Mach3 Board PDFDocument12 pagesST-V2 Mach3 Board PDFCaraiane CatalinNo ratings yet
- Velleman k8200 Printer ManualDocument16 pagesVelleman k8200 Printer ManualbillyboyclydeNo ratings yet
- LCD12864-COG LCD Module User ManualDocument14 pagesLCD12864-COG LCD Module User ManualSriyanjanNo ratings yet
- CNC Usb Controller MK 3Document20 pagesCNC Usb Controller MK 3Antonio Jiménez100% (1)
- Realized By:: Class: Internship PeriodDocument24 pagesRealized By:: Class: Internship Periodabir bzNo ratings yet
- Pac8000 Controllers Ds Gfa1831Document2 pagesPac8000 Controllers Ds Gfa1831mealysrNo ratings yet
- Stepper Motor & Drivers - USB MACH3 4 Axis Controller - PENTING!Document6 pagesStepper Motor & Drivers - USB MACH3 4 Axis Controller - PENTING!FalahNo ratings yet
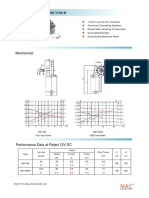
- Wiper Motor - : MechanicalDocument8 pagesWiper Motor - : MechanicalAnonymous ytZsBOVNo ratings yet
- Bobine D'allumage TondeuseDocument15 pagesBobine D'allumage TondeuseThierry AvikianNo ratings yet
- AG-95L Two-Finger Gripper Quick Start GuideDocument20 pagesAG-95L Two-Finger Gripper Quick Start GuidejamesNo ratings yet
- Features:: Mach3 USB Card Installation ManualDocument42 pagesFeatures:: Mach3 USB Card Installation ManualAndronic SebastianNo ratings yet
- Triple CNC MachineDocument27 pagesTriple CNC MachineLeonardo Nicolas Paez100% (1)
- Veichi sd700 Manual v1.0Document289 pagesVeichi sd700 Manual v1.0ronaldoNo ratings yet
- Milling Attachment For Lathe: SynopsisDocument4 pagesMilling Attachment For Lathe: SynopsisAVINASH BHUSARENo ratings yet
- LinuxCNC IntegratorDocument21 pagesLinuxCNC IntegratormilknaniNo ratings yet
- USB MACH3 -5AXIS CARD GUIDEDocument15 pagesUSB MACH3 -5AXIS CARD GUIDELâm Cẩm ĐứcNo ratings yet
- mf70 PKGDocument19 pagesmf70 PKGCarlos RamirezNo ratings yet
- 12v To 18v ConverterDocument7 pages12v To 18v ConverterLuis Paulo100% (1)
- 3 Eksen Mach3 Usb CNC Kontrol Kart - AKZ250 v1.17 PDFDocument41 pages3 Eksen Mach3 Usb CNC Kontrol Kart - AKZ250 v1.17 PDFErol KalfaoğluNo ratings yet
- DDR3 Write and Read Leveling MechanismDocument3 pagesDDR3 Write and Read Leveling MechanismDavid FongNo ratings yet
- VCR Engine ControlDocument71 pagesVCR Engine Controlvlad_paladeNo ratings yet
- ATmega328 DatasheetDocument567 pagesATmega328 DatasheetEthan Carlisle Couto ArchibaldNo ratings yet
- Training Exercises: Machine SimulationDocument113 pagesTraining Exercises: Machine SimulationAmjad PervazNo ratings yet
- Application Note 1Document7 pagesApplication Note 1hossam_fadeel2560No ratings yet
- AT89S8252 In-System ProgrammingDocument38 pagesAT89S8252 In-System ProgrammingPramod JainNo ratings yet
- Debug TCP Performance with Bulk and AIMD PatchDocument2 pagesDebug TCP Performance with Bulk and AIMD PatchMohamed AhmadNo ratings yet
- Click PLC CommunicationDocument30 pagesClick PLC CommunicationHemesh Jain SuranaNo ratings yet
- rs2gprs enDocument11 pagesrs2gprs enftonelloNo ratings yet
- mDACS User Manual for RRC3 and RTx GPSDocument18 pagesmDACS User Manual for RRC3 and RTx GPSSantiagoNo ratings yet
- Modbus Scanner Configuration Overview: Configuring Modbus RTU Master and Modbus/TCP Client OperationDocument1 pageModbus Scanner Configuration Overview: Configuring Modbus RTU Master and Modbus/TCP Client OperationKenawy MohammedNo ratings yet
- Mtech Super PDFDocument12 pagesMtech Super PDFkrrishNo ratings yet
- DNP3 DataSheet V013Document2 pagesDNP3 DataSheet V013sanjayswtNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- B UCSM GUI Storage Management Guide 3 1 Chapter 010101Document16 pagesB UCSM GUI Storage Management Guide 3 1 Chapter 010101vijay kumarNo ratings yet
- SQL Server NotesDocument396 pagesSQL Server NotesPrasad ReddNo ratings yet
- WST Macros Add-In InstructionsDocument3 pagesWST Macros Add-In InstructionsTrader CatNo ratings yet
- Copia de ABB NPCU-01Document4 pagesCopia de ABB NPCU-01Abraham GalvánNo ratings yet
- IBM Cell Broadband EngineDocument81 pagesIBM Cell Broadband EngineVidya JanarthanamNo ratings yet
- ModemLog - ZTE Proprietary USB ModemDocument4 pagesModemLog - ZTE Proprietary USB ModemcrisvodaNo ratings yet
- OBT75+OBS40+OBT70-ATool A4-StudentDocument6 pagesOBT75+OBS40+OBT70-ATool A4-Studentgenji bautistaNo ratings yet
- Tvl-Ict-Css: Quarter 2 - Module 1-4: Setting Up Computer ServersDocument22 pagesTvl-Ict-Css: Quarter 2 - Module 1-4: Setting Up Computer ServersRina Dimayuga100% (2)
- Manual OmniDrive USB2 CF V1-21EDocument2 pagesManual OmniDrive USB2 CF V1-21EJuan RiosNo ratings yet
- Java EnvSetupDocument18 pagesJava EnvSetupmyth.superkingNo ratings yet
- Red Hat Enterprise Linux 6 Installation Guide FR FRDocument617 pagesRed Hat Enterprise Linux 6 Installation Guide FR FRYoussef AddiNo ratings yet
- h14377 Emc Vnxe1600 Block Storage System SsDocument7 pagesh14377 Emc Vnxe1600 Block Storage System Sscanche_xNo ratings yet
- NetPlanner 18-9-0 Installation InstructionsDocument29 pagesNetPlanner 18-9-0 Installation InstructionsShyjin IPNo ratings yet
- College Document SharingDocument2 pagesCollege Document SharingsamuelNo ratings yet
- Millis For ArduinoDocument13 pagesMillis For Arduinogsvijay57100% (1)
- Interview Preparation and Questions DevopsDocument65 pagesInterview Preparation and Questions Devopstran quoc to tran quoc toNo ratings yet
- 2.4.3.4 Packet TracerDocument11 pages2.4.3.4 Packet TracercoleparksNo ratings yet
- FabricFlow RN v12.x.x.x Rev09 Published 01072022Document130 pagesFabricFlow RN v12.x.x.x Rev09 Published 01072022m_homossaniNo ratings yet
- IVC1 Series PLC Manual Seccion I PDFDocument99 pagesIVC1 Series PLC Manual Seccion I PDFIng. Nahum Cesar Hernandez SorianoNo ratings yet
- Fiber Optic Communication and Networks (ECE4005)Document64 pagesFiber Optic Communication and Networks (ECE4005)sai KarthikNo ratings yet
- Sensinode Reference Nanostack v1.0.1Document11 pagesSensinode Reference Nanostack v1.0.1Fida KhattakNo ratings yet
- 15.python OS ModuleDocument14 pages15.python OS Moduledasarajubhavani05No ratings yet
- Everything You Need to Know About Ferroelectric RAM (FRAMDocument23 pagesEverything You Need to Know About Ferroelectric RAM (FRAMNidhin MangodeNo ratings yet
- Hpwja Install Guide enDocument38 pagesHpwja Install Guide enJumping JackNo ratings yet
- C09-Transport ProtocolsDocument18 pagesC09-Transport ProtocolsArul JothiNo ratings yet
- DevNet Associate Version 1 0 DevNet Associate 1 0 Final Exam AnswersDocument32 pagesDevNet Associate Version 1 0 DevNet Associate 1 0 Final Exam AnswersOlga BradyNo ratings yet
- Volte - Voice Over Lte: 3.1. Ims - Ip Multimedia SubsystemDocument12 pagesVolte - Voice Over Lte: 3.1. Ims - Ip Multimedia SubsystemMiguel Angel Mamani ChahuaraNo ratings yet
- NUST SEECS EE-357 ExamDocument3 pagesNUST SEECS EE-357 ExamNayab TajvedNo ratings yet
- SkyLIGHT VCX Controller v1.1.x User ManualDocument172 pagesSkyLIGHT VCX Controller v1.1.x User Manualjaka TingTongNo ratings yet
- Grade 1 ComputerDocument72 pagesGrade 1 Computerkem erlinaNo ratings yet