You might also like
- Solo Run For MotorsDocument8 pagesSolo Run For MotorsMohamed Haleem100% (1)
- En ACS580 Standard Control Program FW C A5Document440 pagesEn ACS580 Standard Control Program FW C A5joseNo ratings yet
- 11KV Switchgear SA and SBDocument19 pages11KV Switchgear SA and SBVikrant DeshmukhNo ratings yet
- Chloride FP 40r Ds en GL 0616 Rev6Document2 pagesChloride FP 40r Ds en GL 0616 Rev6Tanveer Ahmed100% (1)
- Loop Checking and Field Instrument Testing ProcedureDocument3 pagesLoop Checking and Field Instrument Testing Procedureamirubote4No ratings yet
- DH3-31MA-T-ITP-0001 ITP For Commissioning of Complete-Set Startup of Steam Turbine REV.0Document12 pagesDH3-31MA-T-ITP-0001 ITP For Commissioning of Complete-Set Startup of Steam Turbine REV.0Lan RungNo ratings yet
- Commissioning Standard Test FormatsDocument2 pagesCommissioning Standard Test FormatstajudeenNo ratings yet
- Livening Up NotesDocument1 pageLivening Up NotesAceel FitchNo ratings yet
- PUMP Testing SheetDocument3 pagesPUMP Testing SheetAlan Tan Y RNo ratings yet
- Test Report (Revisi Fat)Document5 pagesTest Report (Revisi Fat)Imamudin BuronanMertua TanpaSadar100% (1)
- ATS Sequence of OperationDocument1 pageATS Sequence of OperationnooruddinkhanNo ratings yet
- ELE - Checklist For Sample DBDocument2 pagesELE - Checklist For Sample DBibrahim680% (1)
- Membrane CleanerDocument2 pagesMembrane CleanerJoselito Cortes100% (1)
- Cpr-3 - Catalouge Rele RubberDocument2 pagesCpr-3 - Catalouge Rele Rubbermanuel100% (1)
- MV Cable Hi-Pot Test ShetDocument1 pageMV Cable Hi-Pot Test ShetAhmad Dagamseh100% (1)
- 11 - SOP For Earthing Pit and EarthingDocument15 pages11 - SOP For Earthing Pit and Earthingtryu frtgeuwNo ratings yet
- Method Statement For Testing & Commissioning of Central Battery SystemDocument6 pagesMethod Statement For Testing & Commissioning of Central Battery SystemBabuNo ratings yet
- Motor Bump Test Record Sheet: Project: Motor Tag No Marker: Starter Type: Rating: EX CertificationDocument6 pagesMotor Bump Test Record Sheet: Project: Motor Tag No Marker: Starter Type: Rating: EX CertificationMuhammad AshfaqueNo ratings yet
- FAT Procedure (En)Document2 pagesFAT Procedure (En)wado11No ratings yet
- ABB UNITROL 1005 1010 1020 EN RevF PDFDocument14 pagesABB UNITROL 1005 1010 1020 EN RevF PDFsrinivasNo ratings yet
- Mechanical Completion Certificate for Export PumpsDocument1 pageMechanical Completion Certificate for Export PumpsDeonNo ratings yet
- Maint - Check List - Oil Filled TransforsDocument2 pagesMaint - Check List - Oil Filled TransforsramNo ratings yet
- Erection Procedure For Control Battery - LatestDocument12 pagesErection Procedure For Control Battery - LatestAnmohieyNo ratings yet
- DG & EB Check ListDocument43 pagesDG & EB Check ListRamesh MariyappaNo ratings yet
- Old LT Panel 400 AmpDocument5 pagesOld LT Panel 400 AmpAbhinav TewariNo ratings yet
- SP0407C01 HV Cable Commissioning Test ReportDocument2 pagesSP0407C01 HV Cable Commissioning Test Reportkajale.shrikantNo ratings yet
- Standard Inspection and Test Plan ITP No: 936 Unit Auxiliary TransformersDocument4 pagesStandard Inspection and Test Plan ITP No: 936 Unit Auxiliary TransformersZaid RNo ratings yet
- 11kV Switchgear SchemesDocument17 pages11kV Switchgear SchemesEdciel EbuenNo ratings yet
- HT Breaker ChecklistDocument1 pageHT Breaker ChecklistElectrial DeptNo ratings yet
- Erection Procedure For 6.6 KV Bus DuctDocument7 pagesErection Procedure For 6.6 KV Bus DuctAnmohieyNo ratings yet
- Motor Electric Test RecordDocument1 pageMotor Electric Test RecordArka HatiNo ratings yet
- Hengxin RF Leaky Cable PDFDocument16 pagesHengxin RF Leaky Cable PDFculeros1No ratings yet
- HJDocument4 pagesHJShajil VazhakkalilNo ratings yet
- Factory and site testing of electrical switchgearDocument2 pagesFactory and site testing of electrical switchgearAlla Naveen KumarNo ratings yet
- Testing Procedure For Earth Leakage RelayDocument1 pageTesting Procedure For Earth Leakage RelaySujintharan Nair100% (2)
- A1Z5L2 - Appendix VI - Valve Commissioning Checklist - USDocument1 pageA1Z5L2 - Appendix VI - Valve Commissioning Checklist - USAlpesh PatelNo ratings yet
- NTPC Telangana: Standard ChecklistDocument3 pagesNTPC Telangana: Standard ChecklistVikrant Deshmukh100% (1)
- 34 - hs-78004 - Bringing Plant and Apparatus Under The Safety RulesDocument7 pages34 - hs-78004 - Bringing Plant and Apparatus Under The Safety Rulesrony_lesbt100% (1)
- CM Battery Charger ChecklistDocument2 pagesCM Battery Charger ChecklistVatsavai Appala Narasimha RajuNo ratings yet
- Variable Speed DriveDocument1 pageVariable Speed DriveKrishna JashaNo ratings yet
- Method Statement FOR Testing and Commissioning: Grounding SystemDocument3 pagesMethod Statement FOR Testing and Commissioning: Grounding SystemNon Etabas Gadnatam100% (1)
- Sa P 030Document4 pagesSa P 030Haleem Ur Rashid BangashNo ratings yet
- MODIFY ESDV TO GPFCUDocument2 pagesMODIFY ESDV TO GPFCUMohammed AbdallaNo ratings yet
- Factory Acceptance Test Procedure For DCS - Part 6Document1 pageFactory Acceptance Test Procedure For DCS - Part 6kapsarcNo ratings yet
- Install Cable Tray SupportsDocument3 pagesInstall Cable Tray SupportsMohammad Fazal Khan100% (1)
- ChecklistDocument14 pagesChecklistInstrument SCINo ratings yet
- J1525-HW1-010 SAT Procedure - Rev ADocument16 pagesJ1525-HW1-010 SAT Procedure - Rev Aluis HernandezNo ratings yet
- HT MotorDocument25 pagesHT MotorgaladrialNo ratings yet
- Commissioning Observation and Testing Report: 1. General Project InformationDocument1 pageCommissioning Observation and Testing Report: 1. General Project InformationHumaid ShaikhNo ratings yet
- Procedure of Maintenance of 415V BUSDocument2 pagesProcedure of Maintenance of 415V BUSVatsavai Appala Narasimha Raju100% (1)
- MQP of PanelDocument1 pageMQP of Panelrahulchitrakoot123No ratings yet
- Inspection Test Plan (ITP) Procedure-DigabungkanDocument9 pagesInspection Test Plan (ITP) Procedure-Digabungkanpankrasius herbudiNo ratings yet
- ZLAC8015 Servo Driver ManualDocument9 pagesZLAC8015 Servo Driver ManualTHANAWATNo ratings yet
- Preventive Maintenance of Diesel Generator Sets Daily:: Specimen Check-List ForDocument2 pagesPreventive Maintenance of Diesel Generator Sets Daily:: Specimen Check-List ForAndrewNo ratings yet
- DCI JK5 Fire Protection Site Acceptance TestDocument14 pagesDCI JK5 Fire Protection Site Acceptance TestAwaludin Angga WNo ratings yet
- Method Statement For Cable Laying, Glanding and TerminationDocument12 pagesMethod Statement For Cable Laying, Glanding and TerminationSajid Raza100% (1)
- Pre-Commissioning Tests AC Equipment ListDocument5 pagesPre-Commissioning Tests AC Equipment ListnagarajanNo ratings yet
- 3.1 Testing - and - Commissioning - Procedure - For - MotorsDocument7 pages3.1 Testing - and - Commissioning - Procedure - For - MotorsEdison EstrellaNo ratings yet
- Testing and Commissioning Procedure For MotorsDocument7 pagesTesting and Commissioning Procedure For MotorsPraful Supekar100% (1)
- Testing and Commissioning Procedure For Electric MotorsDocument7 pagesTesting and Commissioning Procedure For Electric MotorsJoel AlcantaraNo ratings yet
- CII - Building A Low-Carbon Indian Economy PDFDocument139 pagesCII - Building A Low-Carbon Indian Economy PDFmaveryqNo ratings yet
- Faults On Electrical SystemDocument21 pagesFaults On Electrical Systemjosh bradley100% (3)
- Electric MotorsDocument25 pagesElectric Motorsnikorn123No ratings yet
- Measuring AC Voltage and Current Using Moving Iron InstrumentsDocument4 pagesMeasuring AC Voltage and Current Using Moving Iron InstrumentsDeepak Jha KashyapNo ratings yet
- Stepper Motor Advantages and TypesDocument4 pagesStepper Motor Advantages and TypesDeepak Jha KashyapNo ratings yet
- SEMIKRON Technical Explanation SEMITOP® Classic EN 2021-07-30 Rev-06Document20 pagesSEMIKRON Technical Explanation SEMITOP® Classic EN 2021-07-30 Rev-06carlosmitecNo ratings yet
- Tutorial 2Document2 pagesTutorial 2sakinah azizanNo ratings yet
- 20367e04-Weld Code For Welding Procedure and ExaminationDocument9 pages20367e04-Weld Code For Welding Procedure and ExaminationPhilip OjugohNo ratings yet
- Gas Well Testing TypesDocument19 pagesGas Well Testing TypesKhalidNo ratings yet
- Lesson Plan Che463Document3 pagesLesson Plan Che463Rafiqah RahimNo ratings yet
- PSA Cast-In Plates - Technical Data SheetDocument7 pagesPSA Cast-In Plates - Technical Data SheetGnansabesan JathurschanNo ratings yet
- 2021 - February 19Document11 pages2021 - February 19jeffNo ratings yet
- BS 1474-1987Document31 pagesBS 1474-1987raftipdo0aNo ratings yet
- STULZ CyberOne EC DX Engineering ManualDocument30 pagesSTULZ CyberOne EC DX Engineering ManualBùi LinhNo ratings yet
- BPDSC-1 Mechanics - FinalDocument196 pagesBPDSC-1 Mechanics - FinalHemanth N vNo ratings yet
- EqwerqwDocument3 pagesEqwerqwRonald TessénNo ratings yet
- Updated PPT of Types of Laser and HolographyDocument27 pagesUpdated PPT of Types of Laser and HolographyTejo KanthNo ratings yet
- HYDRAULICS EXAMDocument4 pagesHYDRAULICS EXAMPrince VinceNo ratings yet
- Review Jurnal ALD - Adella Fahdarina P-02511740000046Document4 pagesReview Jurnal ALD - Adella Fahdarina P-02511740000046Samuel ArelianoNo ratings yet
- Basic GreaseDocument20 pagesBasic Greasefahreez100% (3)
- NR13HELPPT - RTF Page 1 of 17: Help BrainDocument17 pagesNR13HELPPT - RTF Page 1 of 17: Help BrainXuân Hòa NguyễnNo ratings yet
- Vibration and Shock Isolation-Advanced Antivibration ComponentsDocument55 pagesVibration and Shock Isolation-Advanced Antivibration Componentshiginio.moro6182No ratings yet
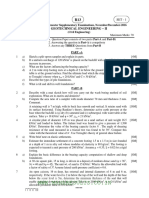
- WWW - Manaresults.Co - In: Geotechnical Engineering - IiDocument1 pageWWW - Manaresults.Co - In: Geotechnical Engineering - IimaheshNo ratings yet
- Api RP 578 Exam - Latest QuestionsDocument3 pagesApi RP 578 Exam - Latest QuestionsMohammad Zaky SapieeNo ratings yet
- Checklist Pekerjaan Spun PileDocument1 pageChecklist Pekerjaan Spun PileBudhi Kurniawan100% (1)
- Measurement of Interfacial Fracture Energy in MicroelectronicDocument13 pagesMeasurement of Interfacial Fracture Energy in MicroelectronicEnriqe PuentesNo ratings yet
- Paulo Correa and Alexandra Correa - Experimental Aetherometry Volume IIA IntroductionDocument9 pagesPaulo Correa and Alexandra Correa - Experimental Aetherometry Volume IIA IntroductionSonyRed100% (1)
- Astm D3350 - 06 PDFDocument7 pagesAstm D3350 - 06 PDFRaul Humberto Mora VillamizarNo ratings yet
- Grade - 3 WaterDocument4 pagesGrade - 3 WaterANOOP TAINANNo ratings yet
- Biot Response SpectrumDocument10 pagesBiot Response SpectrumMacNo ratings yet
- Plate Tectonics Theory ExplainedDocument10 pagesPlate Tectonics Theory ExplainedTourism ColumbioNo ratings yet
- Fundamentals of Petroleum Lec. 5Document10 pagesFundamentals of Petroleum Lec. 5Marco PlaysNo ratings yet
- 5000 Series Brochure - V1.1Document12 pages5000 Series Brochure - V1.1Yelena ObyazovaNo ratings yet
- Ebook t357 Block1 Part3-4 E2i1 n9780749252670 l1Document96 pagesEbook t357 Block1 Part3-4 E2i1 n9780749252670 l1Bobby extramoneyguyNo ratings yet
- 5054 w16 QP 11 PDFDocument20 pages5054 w16 QP 11 PDFMuhammad SaifNo ratings yet