You might also like
- Notes On Adjoint Methods MITDocument6 pagesNotes On Adjoint Methods MITDudu ZhangNo ratings yet
- Critical Analysis of The Critique of The Claim of Propeller-Assisted Straight-Downwind Land Sailing Faster Than WindDocument19 pagesCritical Analysis of The Critique of The Claim of Propeller-Assisted Straight-Downwind Land Sailing Faster Than WindFavio Alejandro Herrera ZapataNo ratings yet
- Calculating Arakawa JacobianDocument3 pagesCalculating Arakawa Jacobianmak112005gmailNo ratings yet
- Adjoint MethodDocument37 pagesAdjoint MethodAries SattiNo ratings yet
- CFD BasicDocument10 pagesCFD Basicranjith AERONo ratings yet
- Turbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsFrom EverandTurbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsNo ratings yet
- Periodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied FunctionsFrom EverandPeriodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied FunctionsNo ratings yet
- Numerical Grid GenerationDocument336 pagesNumerical Grid Generationjiandong3600100% (2)
- Adaptive Refinement in Vibrational Analysis and Isogemetric AnalysisDocument22 pagesAdaptive Refinement in Vibrational Analysis and Isogemetric AnalysisAbhishek KumarNo ratings yet
- Seismology: Surface Waves and Earth OscillationsFrom EverandSeismology: Surface Waves and Earth OscillationsBruce BoltNo ratings yet
- Numerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970From EverandNumerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Bert HubbardNo ratings yet
- Computational MHDDocument66 pagesComputational MHDverthex20992828No ratings yet
- Airfoil Inverse DesignDocument12 pagesAirfoil Inverse DesignFilip StojkovskiNo ratings yet
- Shock TubeDocument11 pagesShock TubeyoannlegNo ratings yet
- Introduction To Convective Heat Transfer Analysis Chapter 8 PDFDocument84 pagesIntroduction To Convective Heat Transfer Analysis Chapter 8 PDFhenrengNo ratings yet
- Computational Fluid-Structure Interaction: Methods and ApplicationsFrom EverandComputational Fluid-Structure Interaction: Methods and ApplicationsNo ratings yet
- CFD Python The 12 Steps To Navier-Stokes EquationsDocument3 pagesCFD Python The 12 Steps To Navier-Stokes EquationsabhinainNo ratings yet
- Poedts MHD Theory PDFDocument148 pagesPoedts MHD Theory PDFhiren_mistry55No ratings yet
- 312H Project - FinalDocument39 pages312H Project - Finalpmd5102100% (3)
- GMSH TutorialDocument29 pagesGMSH TutorialGuy__FawkesNo ratings yet
- Fundamentals of Computational Fluid DynamicsDocument276 pagesFundamentals of Computational Fluid DynamicsthawminNo ratings yet
- Graphs and Tables of the Mathieu Functions and Their First DerivativesFrom EverandGraphs and Tables of the Mathieu Functions and Their First DerivativesNo ratings yet
- Transition and Turbulence: Proceedings of a Symposium Conducted by the Mathematics Research Center, the University of Wisconsin–Madison, October 13–15, 1980From EverandTransition and Turbulence: Proceedings of a Symposium Conducted by the Mathematics Research Center, the University of Wisconsin–Madison, October 13–15, 1980No ratings yet
- Chapter 8 Navier-Stokes EquationDocument16 pagesChapter 8 Navier-Stokes EquationSyahiran SalehNo ratings yet
- Computational Fluid Dynamics For Naval Engineering ProblemsDocument184 pagesComputational Fluid Dynamics For Naval Engineering ProblemsandevariNo ratings yet
- Wave EquationsDocument41 pagesWave Equationseren-jaegerNo ratings yet
- Exact Solutions To The Navier-Stokes EquationsDocument7 pagesExact Solutions To The Navier-Stokes EquationsMohamad KhairNo ratings yet
- The ERCOFTAC Centrifugal Pump OpenFOAM Case-StudyDocument10 pagesThe ERCOFTAC Centrifugal Pump OpenFOAM Case-Studymtl0612No ratings yet
- Automatic DifferentiationDocument22 pagesAutomatic Differentiationgorot1No ratings yet
- Report RoelofsDocument98 pagesReport RoelofsjhnNo ratings yet
- Nuclear Spectroscopy and Reactions 40-CFrom EverandNuclear Spectroscopy and Reactions 40-CJoseph CernyNo ratings yet
- Solitons IntroDocument8 pagesSolitons Intromexicanu99No ratings yet
- Seismic Migration: Imaging of Acoustic Energy by Wave Field Extrapolation..: Imaging of Acoustic Energy by Wave Field ExtrapolationFrom EverandSeismic Migration: Imaging of Acoustic Energy by Wave Field Extrapolation..: Imaging of Acoustic Energy by Wave Field ExtrapolationNo ratings yet
- Mechanics Hydro StatisticsDocument328 pagesMechanics Hydro StatisticsDhanushka BandaraNo ratings yet
- Predicting Pressure Distributions Using CFDDocument177 pagesPredicting Pressure Distributions Using CFDdedysusila100% (5)
- Introduction To Type and Resource SafetyDocument19 pagesIntroduction To Type and Resource Safetyair_bugz100% (1)
- Kittel Kroemer Thermal PhysicsDocument40 pagesKittel Kroemer Thermal PhysicscarlnigNo ratings yet
- Mechanics of Liquids and Gases: International Series of Monographs in Aeronautics and Astronautics: Division II: AerodynamicsFrom EverandMechanics of Liquids and Gases: International Series of Monographs in Aeronautics and Astronautics: Division II: AerodynamicsNo ratings yet
- Practical Finite Element Modeling in Earth Science using MatlabFrom EverandPractical Finite Element Modeling in Earth Science using MatlabNo ratings yet
- Applications of The Discrete Element Method in Mechanical EngineeringDocument14 pagesApplications of The Discrete Element Method in Mechanical Engineeringandylei_23No ratings yet
- CFD LectureDocument82 pagesCFD LectureLong DoanNo ratings yet
- 16 Higher Order Schemes - ADocument24 pages16 Higher Order Schemes - Aalagarg137691No ratings yet
- EML 222/2 Engineering Lab Ii: Experiment ReportDocument14 pagesEML 222/2 Engineering Lab Ii: Experiment ReportPurawin Subramaniam100% (1)
- 2D Euler Riemann RoeDocument72 pages2D Euler Riemann RoeJRNo ratings yet
- Implementation of Level Set Method Based On OpenFOAM For Capturing The Free Interface in in Compressible Fluid FlowsDocument10 pagesImplementation of Level Set Method Based On OpenFOAM For Capturing The Free Interface in in Compressible Fluid FlowsAghajaniNo ratings yet
- Richard FeynmanDocument2 pagesRichard Feynmanmuzammalsafdar100% (1)
- Higgs BundlesDocument125 pagesHiggs BundlesIsmail KhanNo ratings yet
- E The Master of AllDocument12 pagesE The Master of AllchungNo ratings yet
- Deformation Vibration 1-8Document88 pagesDeformation Vibration 1-8Juancho Villa Mitre LocuraNo ratings yet
- Numerical Modeling of Neutron TransportDocument120 pagesNumerical Modeling of Neutron TransportAndrea SpinelliNo ratings yet
- Geostatistical Interpolation: Kriging and The Fukushima DataDocument57 pagesGeostatistical Interpolation: Kriging and The Fukushima DataPeter AngeloNo ratings yet
- 2014 Article 130Document11 pages2014 Article 130Peter AngeloNo ratings yet
- Spatial Location Radiation PDFDocument15 pagesSpatial Location Radiation PDFPeter AngeloNo ratings yet
- NKS 390Document66 pagesNKS 390Peter AngeloNo ratings yet
- Theory of Branching ProcessesDocument244 pagesTheory of Branching ProcessesPeter AngeloNo ratings yet
- Heu Leu Reactors SgsDocument16 pagesHeu Leu Reactors SgsPeter AngeloNo ratings yet
- Naval Reactor Handbook Vol 3Document523 pagesNaval Reactor Handbook Vol 3Peter AngeloNo ratings yet
- Enrichment, Page 2 - Nuclear Safeguards Education PortalDocument1 pageEnrichment, Page 2 - Nuclear Safeguards Education PortalPeter AngeloNo ratings yet
- An Overview of Gas Centrifuges and Their Modern ImplicationsDocument3 pagesAn Overview of Gas Centrifuges and Their Modern ImplicationsPeter AngeloNo ratings yet
- Naval Reactor Handbook Vol 1Document1,562 pagesNaval Reactor Handbook Vol 1Peter AngeloNo ratings yet
- EnrichDocument55 pagesEnrichPeter AngeloNo ratings yet
- Mathematical Modeling and Computer Simulation of Transient Flow in Centrifuge Cascade Pipe Network With Optimizing TechniquesDocument3 pagesMathematical Modeling and Computer Simulation of Transient Flow in Centrifuge Cascade Pipe Network With Optimizing TechniquesPeter AngeloNo ratings yet
- Atomic Powered Submarine Design Chapter 8 V M BukalovDocument52 pagesAtomic Powered Submarine Design Chapter 8 V M BukalovPeter AngeloNo ratings yet
- Handbook of Acoustic Noise ControlDocument271 pagesHandbook of Acoustic Noise ControlPeter Angelo0% (1)
- IAEA-SM-346/113 Regional Safeguards Arrangements: The Argentina-Brazil ExperienceDocument13 pagesIAEA-SM-346/113 Regional Safeguards Arrangements: The Argentina-Brazil ExperiencePeter AngeloNo ratings yet
- CentrifugeDocument5 pagesCentrifugePeter AngeloNo ratings yet
- EnrichDocument55 pagesEnrichPeter AngeloNo ratings yet
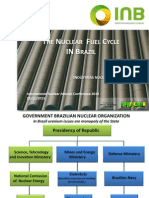
- Brazilian Fuel CycleDocument22 pagesBrazilian Fuel CyclePeter AngeloNo ratings yet
- Brazilian Fuel CycleDocument22 pagesBrazilian Fuel CyclePeter AngeloNo ratings yet
- T2 I 72 0937Document7 pagesT2 I 72 0937Peter AngeloNo ratings yet
- The American Gas Centrifuge Past, Present, and Future: A Paper Presented To The SPLG Workshop October 13, 2003Document10 pagesThe American Gas Centrifuge Past, Present, and Future: A Paper Presented To The SPLG Workshop October 13, 2003Peter AngeloNo ratings yet
- The American Gas Centrifuge Past, Present, and Future: A Paper Presented To The SPLG Workshop October 13, 2003Document10 pagesThe American Gas Centrifuge Past, Present, and Future: A Paper Presented To The SPLG Workshop October 13, 2003Peter AngeloNo ratings yet
- 2008aglaser Sgsvol16Document25 pages2008aglaser Sgsvol16Peter AngeloNo ratings yet
- Numerical Modeling of Neutron TransportDocument120 pagesNumerical Modeling of Neutron TransportAndrea SpinelliNo ratings yet
- Multivariate Data Analysis 7th EditionDocument761 pagesMultivariate Data Analysis 7th EditionPeter Angelo92% (25)
- Dissertation MDDDocument107 pagesDissertation MDDPeter AngeloNo ratings yet
- BrckaDocument7 pagesBrckaPeter AngeloNo ratings yet
- Numerical Modeling of Neutron TransportDocument120 pagesNumerical Modeling of Neutron TransportAndrea SpinelliNo ratings yet
- NuclearForensics Role Stateoftheart ProgramneedsDocument57 pagesNuclearForensics Role Stateoftheart ProgramneedsPeter AngeloNo ratings yet
- A Review On The Inverse of Symmetric Tridiagonal and Block Tridiagonal MatricesDocument22 pagesA Review On The Inverse of Symmetric Tridiagonal and Block Tridiagonal MatricesTadiyos Hailemichael MamoNo ratings yet
- Introduction To Linear Algebra For Science and Engineering 1st EdDocument550 pagesIntroduction To Linear Algebra For Science and Engineering 1st EdJoe92% (51)
- Bridge Course Meterial OriginalDocument83 pagesBridge Course Meterial OriginalAswin Thangaraju0% (1)
- CCS Module 1Document127 pagesCCS Module 1ADLURI SRIKARNo ratings yet
- Scipy Cheat Sheet Python For Data Science: Linear AlgebraDocument1 pageScipy Cheat Sheet Python For Data Science: Linear AlgebraLourdes Victoria UrrutiaNo ratings yet
- MA7158-Applied Mathematics For Communication Engineers PDFDocument21 pagesMA7158-Applied Mathematics For Communication Engineers PDFasuNo ratings yet
- Time and Motion: Dr. Hasan SajidDocument33 pagesTime and Motion: Dr. Hasan SajidTalha YousufNo ratings yet
- 8.6.2 An Analysis On The Location and Type of Index Crimes in The Philippines - 0Document9 pages8.6.2 An Analysis On The Location and Type of Index Crimes in The Philippines - 0MESOMAE DULAYNo ratings yet
- Slides - 2 5 HandoutDocument25 pagesSlides - 2 5 Handoutestifanos.sefiw.17No ratings yet
- C++ For FinanceDocument264 pagesC++ For FinanceKaran MalhotraNo ratings yet
- Linear Algebra - Assignment 2 - : Unit 4 - Week 2Document4 pagesLinear Algebra - Assignment 2 - : Unit 4 - Week 2cse_julieNo ratings yet
- General Relativity - What Is The Best Way To Imagine The Difference Between Vectors and One-Forms? - Physics Stack ExchangeDocument6 pagesGeneral Relativity - What Is The Best Way To Imagine The Difference Between Vectors and One-Forms? - Physics Stack ExchangeKurt PatzikNo ratings yet
- DETERMINANTDocument3 pagesDETERMINANTPratyush PatilNo ratings yet
- Smith McMillan FormsDocument10 pagesSmith McMillan FormsjaganathapandianNo ratings yet
- V. QuadraticDocument17 pagesV. QuadratickankirajeshNo ratings yet
- Kuvempu. UniverseDocument73 pagesKuvempu. UniverseRtgghNo ratings yet
- 21b Text PDFDocument47 pages21b Text PDFyoeluruNo ratings yet
- QMF Lectures 2013-14Document196 pagesQMF Lectures 2013-14XiaoouNo ratings yet
- Robust and Optimal Control PDFDocument7 pagesRobust and Optimal Control PDFShivam YadavNo ratings yet
- Geometry of CRBDocument4 pagesGeometry of CRBUma MageshwariNo ratings yet
- Quiz 05inp Lagrange SolutionDocument8 pagesQuiz 05inp Lagrange SolutionSalman AhmadNo ratings yet
- Kinematics Analysis OF Robots (Part 4)Document27 pagesKinematics Analysis OF Robots (Part 4)engrodeNo ratings yet
- Madanapalle Institute of Technology & Science: Madanapalle (Ugc-Autonomous) WWW - Mits.ac - inDocument41 pagesMadanapalle Institute of Technology & Science: Madanapalle (Ugc-Autonomous) WWW - Mits.ac - inShanmuga KumarNo ratings yet
- Inverse of A Matrix Using Elementary Row Operations (Gauss-Jordan)Document3 pagesInverse of A Matrix Using Elementary Row Operations (Gauss-Jordan)ronald5123No ratings yet
- GROUPS, Subgroups and Cyclic GroupsDocument84 pagesGROUPS, Subgroups and Cyclic GroupsCristine Castulo PreguntaNo ratings yet
- Matrices and DeterminantsDocument16 pagesMatrices and DeterminantsOrestes MendozaNo ratings yet
- A+B A-B B AB A: Homework 1Document3 pagesA+B A-B B AB A: Homework 1diana.alyNo ratings yet
- Proof of The Cofactor Expansion Theorem 1Document13 pagesProof of The Cofactor Expansion Theorem 1pasomagaNo ratings yet
- Journal of Physics A Mathematical and General 2002 Vol. 35 (14) p3245Document20 pagesJournal of Physics A Mathematical and General 2002 Vol. 35 (14) p3245Héctor F BonillaNo ratings yet