You might also like
- Stardestroyer 5Document1 pageStardestroyer 5Jessica WilliamsNo ratings yet
- Stardestroyer 2Document1 pageStardestroyer 2Jessica WilliamsNo ratings yet
- Tecsun Pl-660 UserDocument34 pagesTecsun Pl-660 UserCarlos De La Rosa SanchezNo ratings yet
- StarDestroyer5 PDFDocument1 pageStarDestroyer5 PDFJessica WilliamsNo ratings yet
- Tecsun Pl600 ManualDocument19 pagesTecsun Pl600 ManualJessica WilliamsNo ratings yet
- StarDestroyer1 PDFDocument1 pageStarDestroyer1 PDFJessica WilliamsNo ratings yet
- Day2 TheDesignerStarterKit EnglishDocument22 pagesDay2 TheDesignerStarterKit EnglishRolffoTelloNo ratings yet
- ZCXVXC VCDocument1 pageZCXVXC VCJessica WilliamsNo ratings yet
- HGK GFKGJGHNJDGBJGDocument1 pageHGK GFKGJGHNJDGBJGJessica WilliamsNo ratings yet
- VCCBCVBCVBCVGDFG DFH FHF Hgfs G G FG HFDGF GD DHGDocument1 pageVCCBCVBCVBCVGDFG DFH FHF Hgfs G G FG HFDGF GD DHGJessica WilliamsNo ratings yet
- Wwerw CVBCVB CB CVDocument1 pageWwerw CVBCVB CB CVJessica WilliamsNo ratings yet
- The Invention of LyingDocument108 pagesThe Invention of LyingJessica WilliamsNo ratings yet
- ZazazaDocument1 pageZazazaJessica WilliamsNo ratings yet
- FGDGDGDGDGDD D FG DFGDF G FDG DF G DG DF GDFGDGFDDocument1 pageFGDGDGDGDGDD D FG DFGDF G FDG DF G DG DF GDFGDGFDJessica WilliamsNo ratings yet
- DIC Swatch ReadMe PDFDocument23 pagesDIC Swatch ReadMe PDFeduarx100preNo ratings yet
- Readme For SkinnersDocument1 pageReadme For SkinnersJessica WilliamsNo ratings yet
- Nicolae, Colecţia Annales, Editura "Teora", București, 1997Document1 pageNicolae, Colecţia Annales, Editura "Teora", București, 1997Jessica WilliamsNo ratings yet
- Tecsun Pl600 ManualDocument19 pagesTecsun Pl600 ManualJessica WilliamsNo ratings yet
- My InstallationDocument1 pageMy InstallationJessica WilliamsNo ratings yet
- DF Robot SettingsDocument1 pageDF Robot SettingsJessica WilliamsNo ratings yet
- Image TestDocument2 pagesImage TestJessica WilliamsNo ratings yet
- Style Css ReloadedDocument3 pagesStyle Css ReloadedJessica WilliamsNo ratings yet
- Visitbev Liviu 2015-cDocument2 pagesVisitbev Liviu 2015-cJessica WilliamsNo ratings yet
- Eula SilhouetteDocument3 pagesEula SilhouetteJessica WilliamsNo ratings yet
- The Invention of LyingDocument108 pagesThe Invention of LyingJessica WilliamsNo ratings yet
- HTML5 BoilerplateDocument4 pagesHTML5 BoilerplateJessica WilliamsNo ratings yet
- Arheologia În IsraelDocument3 pagesArheologia În IsraelJessica WilliamsNo ratings yet
- HTML5 BoilerplateDocument4 pagesHTML5 BoilerplateJessica WilliamsNo ratings yet
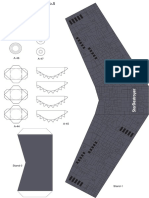
- 3D Paper StructureDocument6 pages3D Paper StructureCorina IcaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ICT Final Exam For Grade 10Document4 pagesICT Final Exam For Grade 10YibeltalNo ratings yet
- Project PACE Design DocumentDocument24 pagesProject PACE Design DocumentSatheesh KumarNo ratings yet
- SD-SDI Quick Start Guide 1.0Document16 pagesSD-SDI Quick Start Guide 1.0Edgar FloresNo ratings yet
- Commonly Used Methods of Component ClassDocument4 pagesCommonly Used Methods of Component ClassSudha MadhuriNo ratings yet
- Persuasive Technology 8th International Conference PERSUASIVE 2013 Sydney NSW Australia April 3-5-2013 ProceedingsDocument277 pagesPersuasive Technology 8th International Conference PERSUASIVE 2013 Sydney NSW Australia April 3-5-2013 ProceedingsDBICA TUDOR100% (1)
- Apache TomcatDocument18 pagesApache Tomcatshashwat2010No ratings yet
- Managing The Oracle Table Reorganization Online or OfflineDocument11 pagesManaging The Oracle Table Reorganization Online or OfflineMahesh KumarNo ratings yet
- Adapting Musical Activities For Persons With DisabilitiesDocument5 pagesAdapting Musical Activities For Persons With DisabilitiesMinas TheodorakisNo ratings yet
- FDOC SIT MasteringPhysics ENG1004-22Document15 pagesFDOC SIT MasteringPhysics ENG1004-22Foo Fang Ming AnthonyNo ratings yet
- Data Structures Through C++Document2 pagesData Structures Through C++Mighty ITNo ratings yet
- Win SKDocument8 pagesWin SKDipan SahooNo ratings yet
- MuseScore enDocument222 pagesMuseScore enMarios MaroliasNo ratings yet
- Information Technology in Education InstitutionsDocument19 pagesInformation Technology in Education InstitutionsSaurabh Arya100% (1)
- الأطعمة المحللة والمحرمةDocument39 pagesالأطعمة المحللة والمحرمةIni FarhanNo ratings yet
- How To Generate GSAK Stats and Automatically Upload To ProfileDocument11 pagesHow To Generate GSAK Stats and Automatically Upload To ProfileMiguelNo ratings yet
- IBM Lotus Symphony Developer's GuideDocument150 pagesIBM Lotus Symphony Developer's GuideRakesh KumarNo ratings yet
- Com 411 PHPDocument6 pagesCom 411 PHPOkunola David AyomideNo ratings yet
- Principles of Information Security 6th Edition Whitman Solutions ManualDocument25 pagesPrinciples of Information Security 6th Edition Whitman Solutions ManualDavidBishopsryz98% (51)
- Uploading BSP Application To Gateway Server (Using Eclipse)Document8 pagesUploading BSP Application To Gateway Server (Using Eclipse)karan.wizardNo ratings yet
- DBMS - Old Q&A For 10 and 5 MarksDocument19 pagesDBMS - Old Q&A For 10 and 5 MarksRoshanNo ratings yet
- Vspaero Gui Tutorial - AdvancedDocument20 pagesVspaero Gui Tutorial - Advancedparamaguru vNo ratings yet
- Solano UserGuide enDocument23 pagesSolano UserGuide enTuan-Anh VoNo ratings yet
- Swiftautoid SA T9680 Black Series 2D Imager Andriod Industrial TabletDocument2 pagesSwiftautoid SA T9680 Black Series 2D Imager Andriod Industrial TabletAirul MutaqinNo ratings yet
- 03.03.2017 Resume - Quazi Rased IqbalDocument2 pages03.03.2017 Resume - Quazi Rased IqbalAnonymous yZSq9a69QNo ratings yet
- Thesis Loan Management SystemDocument4 pagesThesis Loan Management Systemrobynchampagnemanchester100% (2)
- Lecture 1 Introduction To CAD-CAMDocument4 pagesLecture 1 Introduction To CAD-CAMabbas6063No ratings yet
- @vtucode - In-Dd&c0 Question Bank With SolutionDocument31 pages@vtucode - In-Dd&c0 Question Bank With SolutionPraneethNo ratings yet
- DT Midterm ReviewerDocument13 pagesDT Midterm ReviewerMarcos JeremyNo ratings yet
- GuideDocument37 pagesGuidewetaxo4451No ratings yet
- Method 2: Automatically Start A VNC Session Via A Systemd Service ScriptDocument2 pagesMethod 2: Automatically Start A VNC Session Via A Systemd Service ScriptjoNo ratings yet