You might also like
- My ThesisDocument125 pagesMy ThesisAjinkya DeshmukhNo ratings yet
- Toeplitz Matrices Review by GrayDocument98 pagesToeplitz Matrices Review by GraysurvinderpalNo ratings yet
- B GL 354 001 Tactical Electronic WarfareDocument165 pagesB GL 354 001 Tactical Electronic WarfareJared A. Lang100% (2)
- Ee263 Course ReaderDocument430 pagesEe263 Course ReadersurvinderpalNo ratings yet
- Use of Machine Learning in Petroleum Production Optimization Under Geological UncertaintyDocument5 pagesUse of Machine Learning in Petroleum Production Optimization Under Geological UncertaintysurvinderpalNo ratings yet
- CS106L From StanfordDocument548 pagesCS106L From StanfordModick BasnetNo ratings yet
- Maximum Entropy DistributionDocument11 pagesMaximum Entropy DistributionsurvinderpalNo ratings yet
- 05 EQS Fiels, Boundary - HausDocument73 pages05 EQS Fiels, Boundary - HausElcan DiogenesNo ratings yet
- 2407 Electronics Technician Volume 4 Radar SystemsDocument86 pages2407 Electronics Technician Volume 4 Radar SystemsBhukya VenkateshNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Gayatri Mantras of Several GodDocument10 pagesGayatri Mantras of Several GodAnup KashyapNo ratings yet
- A Lightweight True Random Number Generator For Root of Trust ApplicationsDocument11 pagesA Lightweight True Random Number Generator For Root of Trust ApplicationsMADDULURI JAYASRINo ratings yet
- Ferrozine Rapid Liquid Method Method 8147 0.009 To 1.400 MG/L Fe Pour-Thru CellDocument6 pagesFerrozine Rapid Liquid Method Method 8147 0.009 To 1.400 MG/L Fe Pour-Thru CellCarlos Andres MedinaNo ratings yet
- Amendment No. 2 To AS 2047-2014 Windows and External Glazed Doors in BuildingsDocument2 pagesAmendment No. 2 To AS 2047-2014 Windows and External Glazed Doors in BuildingsTommy AndersNo ratings yet
- Water Treatment Lecture 4Document34 pagesWater Treatment Lecture 4pramudita nadiahNo ratings yet
- Questions and Answers About Lead in Ceramic Tableware: Contra Costa Health Services / Lead Poisoning Prevention ProjectDocument4 pagesQuestions and Answers About Lead in Ceramic Tableware: Contra Costa Health Services / Lead Poisoning Prevention Projectzorro21072107No ratings yet
- Fighting The Sixth Mass ExtinctionDocument25 pagesFighting The Sixth Mass ExtinctionRichard J. MarksNo ratings yet
- My Ideal Home: Name No. Class Date Mark TeacherDocument5 pagesMy Ideal Home: Name No. Class Date Mark TeacherQuadrado MágicoNo ratings yet
- C.4. Quiz Conservation of BiodiversityDocument2 pagesC.4. Quiz Conservation of Biodiversitylaura pongutaNo ratings yet
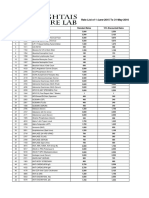
- Rate List of 1-June-2015 To 31-May-2016: S.No Code Test Name Standard Rates 15% Discounted RatesDocument25 pagesRate List of 1-June-2015 To 31-May-2016: S.No Code Test Name Standard Rates 15% Discounted RatesMirza BabarNo ratings yet
- Harrington SOAP NoteDocument5 pagesHarrington SOAP NoteDanielle100% (4)
- Mechanical Smoke Ventilation Calculations For Basement (Car Park)Document7 pagesMechanical Smoke Ventilation Calculations For Basement (Car Park)Mahmoud Abd El-KaderNo ratings yet
- Medical BiotechnologyDocument4 pagesMedical Biotechnologyعمر بن عليNo ratings yet
- Foods 09 01560 PDFDocument10 pagesFoods 09 01560 PDFkim cheNo ratings yet
- Clinical Science of Guilen Barren SyndromeDocument2 pagesClinical Science of Guilen Barren SyndromemanakimanakuNo ratings yet
- 2017 Induction Programme V1Document3 pages2017 Induction Programme V1AL SolmiranoNo ratings yet
- PRICELIST E Katalogs IVD 06042023 INDOPUTRA - PDF TerbaruDocument6 pagesPRICELIST E Katalogs IVD 06042023 INDOPUTRA - PDF Terbaruseksi sspk sarprasNo ratings yet
- Thermal Imaging Tech ResourceDocument20 pagesThermal Imaging Tech Resourceskimav86100% (1)
- MSDS Aradur 2965 PDFDocument9 pagesMSDS Aradur 2965 PDFkamalnandreNo ratings yet
- Ace of Spades + Outlaw 125 2019Document85 pagesAce of Spades + Outlaw 125 2019Nelson RodrigoNo ratings yet
- CR300 Wireless Communication ProtocolDocument130 pagesCR300 Wireless Communication ProtocolHenry Martinez BedoyaNo ratings yet
- Disorders of The Endocrine System and Dental ManagementDocument63 pagesDisorders of The Endocrine System and Dental ManagementSanni FatimaNo ratings yet
- Board of Technical Education Uttar Pradesh Lucknow: CODE 2298Document2 pagesBoard of Technical Education Uttar Pradesh Lucknow: CODE 2298Md Shaaz100% (1)
- Eye Examination: Dr. Seng Serey / Prof .Kenn Freedman Prof - Kong PisethDocument78 pagesEye Examination: Dr. Seng Serey / Prof .Kenn Freedman Prof - Kong PisethSela KHNo ratings yet
- Pharma Iii To Viii PDFDocument57 pagesPharma Iii To Viii PDFRaja PrabhuNo ratings yet
- Text For Number 1-3: How To Make Passion Fruit Juice IngredientsDocument4 pagesText For Number 1-3: How To Make Passion Fruit Juice Ingredientsakmal maulanaNo ratings yet
- Grade 7 Information Writing: The Bulldog: A Dog Like No OtherDocument5 pagesGrade 7 Information Writing: The Bulldog: A Dog Like No Otherapi-202727113No ratings yet
- Zeolites and Ordered Porous Solids - Fundamentals and ApplicationsDocument376 pagesZeolites and Ordered Porous Solids - Fundamentals and ApplicationsHenrique Souza100% (1)
- Version 2 Dog Legged Stair ES EN 1992-1-1 2015Document29 pagesVersion 2 Dog Legged Stair ES EN 1992-1-1 2015Khaja100% (2)
- r315 Quick Start PDFDocument80 pagesr315 Quick Start PDFfdsfasdsfadsNo ratings yet