You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Issurin Principles and Basics of Advanced Athletic TrainingDocument242 pagesIssurin Principles and Basics of Advanced Athletic Trainingcraig101496% (24)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tailless AircraftDocument17 pagesTailless AircraftVikasVickyNo ratings yet
- Itinerary Receipt: Basic InfoDocument2 pagesItinerary Receipt: Basic Infocraig1014No ratings yet
- Are We Getting Smarter - Rising IQ in The Twenty-First Century (2012)Document326 pagesAre We Getting Smarter - Rising IQ in The Twenty-First Century (2012)ContenderC100% (2)
- Athlete Biological PassportDocument3 pagesAthlete Biological Passportcraig1014No ratings yet
- Aaa 2010 m200m Final Biomechanical AnalysisDocument3 pagesAaa 2010 m200m Final Biomechanical Analysiscraig1014No ratings yet
- Aruba-Coaching 21st Century (Kompatibilitätsmodus)Document44 pagesAruba-Coaching 21st Century (Kompatibilitätsmodus)craig1014No ratings yet
- Gateshead 2010 m200m Final Biomechanical AnalysisDocument3 pagesGateshead 2010 m200m Final Biomechanical Analysiscraig1014No ratings yet
- Strengthtraining 1Document26 pagesStrengthtraining 1craig1014100% (5)
- SovietRunningandHurdling YessisDocument43 pagesSovietRunningandHurdling Yessiscraig1014No ratings yet
- Peak Performance: Spine Mobility WorkoutDocument6 pagesPeak Performance: Spine Mobility Workoutcraig1014No ratings yet
- Sports Nutrition EssentialsDocument36 pagesSports Nutrition Essentialscraig1014No ratings yet
- State PDFDocument13 pagesState PDFcraig1014No ratings yet
- v10n1 23pdfDocument6 pagesv10n1 23pdfcraig1014No ratings yet
- Viru1996 AdaptationsToSportsTrainingDocument308 pagesViru1996 AdaptationsToSportsTrainingcraig1014100% (4)
- Vladimir Issurin - Block PeriodisationDocument41 pagesVladimir Issurin - Block Periodisationcraig1014100% (4)
- d9 VolvoDocument57 pagesd9 Volvofranklin972100% (2)
- Seismic Design & Installation Guide: Suspended Ceiling SystemDocument28 pagesSeismic Design & Installation Guide: Suspended Ceiling SystemhersonNo ratings yet
- SuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09Document2 pagesSuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09igor brocaNo ratings yet
- Limak 2017 Annual ReportDocument122 pagesLimak 2017 Annual Reportorcun_ertNo ratings yet
- Programmable Safety Systems PSS-Range: Service Tool PSS SW QLD, From Version 4.2 Operating Manual Item No. 19 461Document18 pagesProgrammable Safety Systems PSS-Range: Service Tool PSS SW QLD, From Version 4.2 Operating Manual Item No. 19 461MAICK_ITSNo ratings yet
- Synthetic Rubber Proofed/Coated Fuel Pump Diaphragm Fabric-Specification (Document9 pagesSynthetic Rubber Proofed/Coated Fuel Pump Diaphragm Fabric-Specification (Ved PrakashNo ratings yet
- Rheobuild 1100: A High Range Water Reducing Superplasticising Admixture For The Production of Rheoplastic ConcreteDocument3 pagesRheobuild 1100: A High Range Water Reducing Superplasticising Admixture For The Production of Rheoplastic ConcreteFrancois-No ratings yet
- Fm-II Quiz 1 19-20 - Section1 - Set1Document2 pagesFm-II Quiz 1 19-20 - Section1 - Set1nivedithashetty0123No ratings yet
- (TDB) VRF ODU DVM S (R410A, 230V, 60Hz, CO) For LA - Ver.2.0 - 190529Document109 pages(TDB) VRF ODU DVM S (R410A, 230V, 60Hz, CO) For LA - Ver.2.0 - 190529jeffersonNo ratings yet
- Samsung CodesDocument14 pagesSamsung Codesapi-3738581100% (2)
- Cable Ties DatasheetDocument7 pagesCable Ties DatasheetGovind ChaudhariNo ratings yet
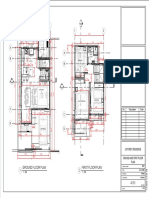
- Floor Plans & ElevationsDocument6 pagesFloor Plans & Elevationsbryan cardonaNo ratings yet
- 2x18 AWG Shielded Fire Alarm and Control Cable - 5M11802103Document2 pages2x18 AWG Shielded Fire Alarm and Control Cable - 5M11802103Alvaro Coy H.No ratings yet
- Testing Report For Pressure Relief Valves: Petrofac International (UAE) LLCDocument1 pageTesting Report For Pressure Relief Valves: Petrofac International (UAE) LLCmurthy challapalliNo ratings yet
- .Preliminary PagesDocument12 pages.Preliminary PagesKimBabNo ratings yet
- Hydraulic Jump - 1Document3 pagesHydraulic Jump - 1Manmohit SinghNo ratings yet
- Brochure FDP - EG 16.08.2021-1-2-2Document3 pagesBrochure FDP - EG 16.08.2021-1-2-2sri sivaNo ratings yet
- Mitsubishi Electric Product OverviewDocument116 pagesMitsubishi Electric Product OverviewPepes HiuuNo ratings yet
- VX-1700 Owners ManualDocument32 pagesVX-1700 Owners ManualVan ThaoNo ratings yet
- ICON Catalog LocationsDocument16 pagesICON Catalog LocationsTools StuffsNo ratings yet
- 3 3 1 Material Sorter Design ChallengeDocument3 pages3 3 1 Material Sorter Design Challengeapi-343534512No ratings yet
- Wear Study On SS316L, Ti-6Al-4V, PEEK, Polyurethane and Alumina Used As Bio-MaterialDocument5 pagesWear Study On SS316L, Ti-6Al-4V, PEEK, Polyurethane and Alumina Used As Bio-MaterialRing MasterNo ratings yet
- REE Copy PDFDocument9 pagesREE Copy PDFJake ZozobradoNo ratings yet
- GYANDOOT SamitiDocument16 pagesGYANDOOT SamitivinaykoolsNo ratings yet
- DO 178 B Brief NotesDocument18 pagesDO 178 B Brief NotesMani Shankar PrasadNo ratings yet
- Phys114 Ps 1Document11 pagesPhys114 Ps 1Reine Amabel JarudaNo ratings yet
- VULCAN Instruction Manual ALL-A4Document94 pagesVULCAN Instruction Manual ALL-A4Ayco DrtNo ratings yet
- Microhydro DirectoryDocument4 pagesMicrohydro Directoryrabei romulusNo ratings yet
- Content Beyond SyllabusDocument3 pagesContent Beyond SyllabusRahul PolNo ratings yet