You might also like
- Mathematical Theory of Connecting Networks and Telephone TrafficFrom EverandMathematical Theory of Connecting Networks and Telephone TrafficNo ratings yet
- CH 16 - DC MachinesDocument55 pagesCH 16 - DC MachinesDaoodNo ratings yet
- S. R Filonovich-The Greatest Speed (Science For Everyone) - Mir Publishers (1986) PDFDocument288 pagesS. R Filonovich-The Greatest Speed (Science For Everyone) - Mir Publishers (1986) PDFMLalli5340No ratings yet
- AN-556 Introduction To Power Supplies: Application ReportDocument11 pagesAN-556 Introduction To Power Supplies: Application ReportDhanyasriNo ratings yet
- L2-3 - M3 Electrotech - Physics - EN PDFDocument12 pagesL2-3 - M3 Electrotech - Physics - EN PDFAnnemarija KalninaNo ratings yet
- Electro-Pneumatics: Module EP-5: Sensors in Electro-Pneumatics (Proximity Switches and Pressure Switches)Document36 pagesElectro-Pneumatics: Module EP-5: Sensors in Electro-Pneumatics (Proximity Switches and Pressure Switches)Joesun LizardoNo ratings yet
- Resistivity in Simple Way PDFDocument43 pagesResistivity in Simple Way PDFAsem Ahmed100% (1)
- Maglev Train PosterDocument1 pageMaglev Train PosterJoseph TaylorNo ratings yet
- Single-Electron Transistors: Physics World ArchiveDocument7 pagesSingle-Electron Transistors: Physics World ArchiveDebopam DattaNo ratings yet
- Thermionic Energy Conversion SystemDocument15 pagesThermionic Energy Conversion SystemJan BenedictNo ratings yet
- ArticleDocument135 pagesArticlefarhan rajib100% (1)
- Blocking Oscillator: Resistor Transformer Transistor Duty-Cycle Leds Red-Eye EffectDocument5 pagesBlocking Oscillator: Resistor Transformer Transistor Duty-Cycle Leds Red-Eye EffectArul RajNo ratings yet
- Threaded Fasteners CH 10Document37 pagesThreaded Fasteners CH 10sarath6725No ratings yet
- Earth InductorDocument42 pagesEarth InductorKhan AaghaNo ratings yet
- Dimensional AnalysisDocument16 pagesDimensional AnalysishigginscribdNo ratings yet
- Betalight Tritium Illumination DevicesDocument28 pagesBetalight Tritium Illumination DevicesGautam NatrajanNo ratings yet
- GE Industrial Tube Manual 45 To 58Document813 pagesGE Industrial Tube Manual 45 To 58Pablo Oddone100% (3)
- Philips Mosfet Class AbDocument9 pagesPhilips Mosfet Class AbAnthony Fernandez MendezNo ratings yet
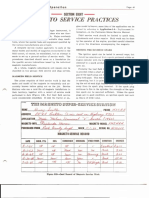
- Magneto Service Practices (49-64)Document16 pagesMagneto Service Practices (49-64)TIMNo ratings yet
- Chapter 01 DC CircuitsDocument42 pagesChapter 01 DC CircuitsRAJANo ratings yet
- Robotic Arm DesignDocument15 pagesRobotic Arm DesignOreoluwa AdediwuraNo ratings yet
- Tesla Coil by SteffanDocument109 pagesTesla Coil by Steffanban bekasNo ratings yet
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- 0702 Pnuematic Component Symbols - ASCO PDFDocument2 pages0702 Pnuematic Component Symbols - ASCO PDFShilpa Kamath100% (1)
- 1962 Belevitch Summary of The History of Circuit TheoryDocument8 pages1962 Belevitch Summary of The History of Circuit Theorywahlgren9483No ratings yet
- Contra Wound CoilsDocument26 pagesContra Wound CoilsmiguelteixeiramaNo ratings yet
- Power Supply Unit For An Electric Discharge MachineDocument6 pagesPower Supply Unit For An Electric Discharge MachineAhmed ShadeedNo ratings yet
- Main Parts of Capstan Lathe and Turret LatheDocument8 pagesMain Parts of Capstan Lathe and Turret LatheShuvoVatt0% (1)
- Implementation of Autonomous Control System of The Chain Wheel Robot Using The Backpropagation Artificial Neural Network (ANN) MethodsDocument6 pagesImplementation of Autonomous Control System of The Chain Wheel Robot Using The Backpropagation Artificial Neural Network (ANN) MethodsInternational Journal of Innovative Science and Research Technology100% (1)
- Magnetic ReconnectionDocument62 pagesMagnetic Reconnectionjburleson11100% (2)
- Three Phase Transformer Connections and Basics PDFDocument13 pagesThree Phase Transformer Connections and Basics PDFDAYA LAHARENo ratings yet
- The History of Ceramic FilterDocument7 pagesThe History of Ceramic FilterLuiz059No ratings yet
- Rocketry HistoryDocument37 pagesRocketry HistoryGhouse ShaikNo ratings yet
- 507 Mechanical Movemets PDFDocument132 pages507 Mechanical Movemets PDFDario_ScribNo ratings yet
- Thermocouple Table - IPTS68 PDFDocument418 pagesThermocouple Table - IPTS68 PDFspurscouk100% (1)
- Atmospheric Boundary Layer Flows PDFDocument304 pagesAtmospheric Boundary Layer Flows PDFkarolinesuellyNo ratings yet
- Muse 117Document6 pagesMuse 117Eternal12No ratings yet
- GalvanometerDocument6 pagesGalvanometermohamed hemdanNo ratings yet
- Miniature Piezoelectric Mobile Robot Driven by StandingWaveDocument6 pagesMiniature Piezoelectric Mobile Robot Driven by StandingWaveHassan HaririNo ratings yet
- Beach Wheelchair ProjectDocument180 pagesBeach Wheelchair ProjectMichela França100% (1)
- A Simple TestDocument3 pagesA Simple Testkipkoech_rotichNo ratings yet
- Antique Mechanic Al Computers (Byte 1978)Document27 pagesAntique Mechanic Al Computers (Byte 1978)Peeters GuyNo ratings yet
- Nitinol Industrial Applications SMST00Document9 pagesNitinol Industrial Applications SMST00Kumar Saheb100% (1)
- Introduction To Mechanism of MachineryDocument31 pagesIntroduction To Mechanism of Machinerydaniel hambissaNo ratings yet
- A Spark Erosion Apparatus - MikesworkshopDocument15 pagesA Spark Erosion Apparatus - MikesworkshopjrnelsonNo ratings yet
- File 190911141756Document2 pagesFile 190911141756Dario ValidžićNo ratings yet
- Feeling Comfortable With Logic Analyzers PDFDocument24 pagesFeeling Comfortable With Logic Analyzers PDFJ dosherNo ratings yet
- Analysis of Current Propulsion Technologies For Interplanetary Transit With High Mass PayloadsDocument68 pagesAnalysis of Current Propulsion Technologies For Interplanetary Transit With High Mass Payloadsapi-220413855No ratings yet
- Benchtop PhotolithographyDocument2 pagesBenchtop PhotolithographyPaola VegaNo ratings yet
- Handbook of Vacuum Arc Science and TechnologyDocument772 pagesHandbook of Vacuum Arc Science and TechnologynguyenthanhhopNo ratings yet
- Parametric ExcitationDocument14 pagesParametric ExcitationSolomanTrismosinNo ratings yet
- Exp2 Magnetic AmplifierDocument20 pagesExp2 Magnetic AmplifierNikhil Aggarwal50% (2)
- d882p PDFDocument3 pagesd882p PDFdiego rotpeNo ratings yet
- The Transit: Navigation Satellite SystemDocument85 pagesThe Transit: Navigation Satellite Systemjtek01No ratings yet
- SolenoidDocument8 pagesSolenoidVadim GoykhmanNo ratings yet
- The Modified Roschin Godin Searl Generators: (M-RG-Searl-G) Mahmoud E. YousifDocument8 pagesThe Modified Roschin Godin Searl Generators: (M-RG-Searl-G) Mahmoud E. YousifJohnsro LiktroNo ratings yet
- Handbook of Magnetic PDFDocument572 pagesHandbook of Magnetic PDFQassem MohaidatNo ratings yet
- ECSS E ST 50 15C (1may2015)Document97 pagesECSS E ST 50 15C (1may2015)jsadachiNo ratings yet
- An Electronic Control Unit Design For A Miniature Jet Engine PDFDocument157 pagesAn Electronic Control Unit Design For A Miniature Jet Engine PDFSỹ RonNo ratings yet
- Laundrymachine - Program Chart PDFDocument2 pagesLaundrymachine - Program Chart PDFAnonymous pmzFB6jcNo ratings yet
- Doyle: Lot No 249Document20 pagesDoyle: Lot No 249watevaidNo ratings yet
- Max Neuhaus: Drive in MusicDocument4 pagesMax Neuhaus: Drive in MusicwatevaidNo ratings yet
- Toute La Memoire Du Monde (International Festival of Restored Films 2012)Document64 pagesToute La Memoire Du Monde (International Festival of Restored Films 2012)watevaidNo ratings yet
- Daniels - Sending and ReceivingDocument6 pagesDaniels - Sending and ReceivingwatevaidNo ratings yet
- Canada National Archives - McLuhanDocument509 pagesCanada National Archives - McLuhanDavo Lo Schiavo100% (1)
- Fiedler Cross The Border Bridge The Gap Playboy 1969 BWDocument13 pagesFiedler Cross The Border Bridge The Gap Playboy 1969 BWwatevaid100% (1)
- Fiedler Cross The Border Bridge The Gap Playboy 1969 BWDocument13 pagesFiedler Cross The Border Bridge The Gap Playboy 1969 BWwatevaid100% (1)
- Installation and Operation Manual For Omega Series Amplifiers 3-3-2008Document114 pagesInstallation and Operation Manual For Omega Series Amplifiers 3-3-2008berebgrNo ratings yet
- Applied Hydraulics & PneumaticsDocument281 pagesApplied Hydraulics & PneumaticsAnonymous p8bHAAxNo ratings yet
- 1746-HSRV SLC Servo Control ModuleDocument12 pages1746-HSRV SLC Servo Control ModuleAnonymous L7XrxpeI1zNo ratings yet
- "Smart Dustbin Using Arduino": Maharashtra State Board of Technical Education, MumbaiDocument22 pages"Smart Dustbin Using Arduino": Maharashtra State Board of Technical Education, MumbaiEr Dinesh TambeNo ratings yet
- Orion ORN CatalogueDocument90 pagesOrion ORN Catalogueesau hernandezNo ratings yet
- E - Gizmo Kits & ModulesDocument19 pagesE - Gizmo Kits & ModulesMjoyce TejeroNo ratings yet
- Encoder 7055Document4 pagesEncoder 7055danilo_1724013365No ratings yet
- ST Ep DR 86a 1Document2 pagesST Ep DR 86a 1Sergio Trujillo CerroNo ratings yet
- Gsk983t-h Version Tv3.0ab-8 PLC User ManualDocument28 pagesGsk983t-h Version Tv3.0ab-8 PLC User ManualCarlos FCNo ratings yet
- Global 3 Servogun Setup Users Manual PDFDocument125 pagesGlobal 3 Servogun Setup Users Manual PDFDeyler Saquetto0% (1)
- Servo Motors and Drives: SDA Series 100W 3.5KWDocument22 pagesServo Motors and Drives: SDA Series 100W 3.5KWWan Aida NatasyaNo ratings yet
- Human Following Robot-2 PDFDocument7 pagesHuman Following Robot-2 PDFSUDEEPTA CHANDRA PAULNo ratings yet
- Worldskills Mobile Robotics: FeaturesDocument2 pagesWorldskills Mobile Robotics: FeaturesJorge CastañoNo ratings yet
- Doppler Speed LogDocument16 pagesDoppler Speed LogCodruţ ErașcuNo ratings yet
- Sensors and ActuatorsDocument29 pagesSensors and ActuatorstimothydpaulNo ratings yet
- Obstacle Avoidance Robot Using Arduino IJERTCONV6IS13197Document4 pagesObstacle Avoidance Robot Using Arduino IJERTCONV6IS13197Xaf FarNo ratings yet
- Diagnostic r0111-401Document23 pagesDiagnostic r0111-401M Farhan100% (2)
- LS TunnelDocument14 pagesLS Tunnel17 7003 Abirami DNo ratings yet
- ParameterDocument342 pagesParameterirving lopezNo ratings yet
- Adjustable Speed Induction Motor DriveDocument20 pagesAdjustable Speed Induction Motor DrivePathum SudasingheNo ratings yet
- Hk401b ManualDocument1 pageHk401b ManualTee JcNo ratings yet
- Advanced Motion Controls Dq111ee15a40nacDocument7 pagesAdvanced Motion Controls Dq111ee15a40nacElectromateNo ratings yet
- Pavc Complete Hy28 2662 CDDocument46 pagesPavc Complete Hy28 2662 CDMoein Emani100% (1)
- Servo Motor Speed and Direction ControlDocument7 pagesServo Motor Speed and Direction Controltazeb100% (1)
- Automatic Sorting MachineDocument5 pagesAutomatic Sorting MachineJournal 4 ResearchNo ratings yet
- Erhardt + Leimer DC5500 Digital ControllerDocument64 pagesErhardt + Leimer DC5500 Digital ControllerUlises PCNo ratings yet
- Product Manual 54052 (Revision B) : PG-PL Governor InstallationDocument14 pagesProduct Manual 54052 (Revision B) : PG-PL Governor InstallationAndreaGentileNo ratings yet
- User Guide: Supermarine Spitfire MK XVIDocument17 pagesUser Guide: Supermarine Spitfire MK XVIPedro ValdezNo ratings yet
- Pen PlotterDocument24 pagesPen PlotterMridul SethiNo ratings yet
- The Dynamics of A Simple Servomechanism For Angular Position ControlDocument2 pagesThe Dynamics of A Simple Servomechanism For Angular Position ControlHaroune DjemaiouneNo ratings yet