You might also like
- MC0074 - Statistical and Numerical Methods Using C++Document14 pagesMC0074 - Statistical and Numerical Methods Using C++Ravish RavindranNo ratings yet
- Computer Vision: Spring 2006 15-385,-685Document58 pagesComputer Vision: Spring 2006 15-385,-685minh_neuNo ratings yet
- Chapter 1Document8 pagesChapter 1hitesh89No ratings yet
- Vtuupdates - Numerical Solution of PDEDocument39 pagesVtuupdates - Numerical Solution of PDEShanthi.VNo ratings yet
- Fourier Transform (For Non-Periodic Signals)Document27 pagesFourier Transform (For Non-Periodic Signals)hamza abdo mohamoudNo ratings yet
- Week 1 Ee518 Winter 2014Document19 pagesWeek 1 Ee518 Winter 2014joe.kurina3194No ratings yet
- SHM Review - SHM Using Differential Equations - Critical DampingDocument18 pagesSHM Review - SHM Using Differential Equations - Critical Dampingaaljuhani123No ratings yet
- X That Makes 0 The Function:: e X X FDocument7 pagesX That Makes 0 The Function:: e X X FJuan RienziNo ratings yet
- Refresher: Perceptron Training AlgorithmDocument12 pagesRefresher: Perceptron Training Algorithmeduardo_quintanill_3No ratings yet
- Closed Form FormDocument14 pagesClosed Form FormManiRoopNo ratings yet
- ChaosDocument9 pagesChaosTim WengenmayrNo ratings yet
- Mamdani FISDocument4 pagesMamdani FISAn Ton-That0% (1)
- Col100 Minor PDFDocument13 pagesCol100 Minor PDFgNo ratings yet
- Motivation For Fourier SeriesDocument18 pagesMotivation For Fourier Serieshamza abdo mohamoudNo ratings yet
- R Numeric ProgrammingDocument124 pagesR Numeric Programmingvsuarezf2732100% (1)
- Ece2610 Chap6Document32 pagesEce2610 Chap6Nurul Fahmi AriefNo ratings yet
- Calculating Fourier SeriesDocument14 pagesCalculating Fourier Seriesapi-3747235No ratings yet
- Solution 4 Ann Weka 2012Document8 pagesSolution 4 Ann Weka 2012Nguyen Tien ThanhNo ratings yet
- Remarks On Input To State StabilizationDocument6 pagesRemarks On Input To State Stabilizationsysbio10No ratings yet
- Perceptons Neural NetworksDocument33 pagesPerceptons Neural Networksvasu_koneti5124No ratings yet
- New Evolutionary Particle Swarm Algorithm (Epso) Applied To Voltage/Var ControlDocument6 pagesNew Evolutionary Particle Swarm Algorithm (Epso) Applied To Voltage/Var ControlTony HomsiNo ratings yet
- Declectures Non Linear EquationsDocument23 pagesDeclectures Non Linear EquationsAdeniji OlusegunNo ratings yet
- Fuzzy Logic and Fuzzy InferenceDocument65 pagesFuzzy Logic and Fuzzy InferencearuchellamNo ratings yet
- HW7 SolDocument6 pagesHW7 Solmetmet476No ratings yet
- PHY250 Lectures1-8 CompleteDocument48 pagesPHY250 Lectures1-8 CompleteawirogoNo ratings yet
- Numerical Methods: y X y X DX DyDocument62 pagesNumerical Methods: y X y X DX DyThammarith LikittheeramethNo ratings yet
- UNIT 1: Simplification of Boolean ExpressionDocument166 pagesUNIT 1: Simplification of Boolean ExpressionHope HerondaleNo ratings yet
- MAT6007 Session4 MP Neuron PerceptronsDocument15 pagesMAT6007 Session4 MP Neuron Perceptronsmanojnaidu yandrapuNo ratings yet
- Stability of Gepp and GecpDocument3 pagesStability of Gepp and Gecpgovawls89No ratings yet
- COMP 4033-2020-21 Question Paper AnswersDocument18 pagesCOMP 4033-2020-21 Question Paper AnswersaaruniversalNo ratings yet
- ModuleDocument25 pagesModuleYogix ThetroubleshooterNo ratings yet
- Random Thoughts On Numerical AnalysisDocument17 pagesRandom Thoughts On Numerical AnalysispsylancerNo ratings yet
- ExamMSE 170122 TEORIEDocument9 pagesExamMSE 170122 TEORIEWolf Andrew 73No ratings yet
- An Introduction To An Introduction To Optimization Optimization Using Using Evolutionary Algorithms Evolutionary AlgorithmsDocument45 pagesAn Introduction To An Introduction To Optimization Optimization Using Using Evolutionary Algorithms Evolutionary AlgorithmsSai Naga Sri HarshaNo ratings yet
- BCSL33 AssignmentDocument14 pagesBCSL33 Assignmentsomeone someoneNo ratings yet
- (TailieuVNU - Com) - Slide-Tin-hieu-He-thong-Lesson-2-Introduction-to-systems-Hoang-Gia-Hung-UETDocument16 pages(TailieuVNU - Com) - Slide-Tin-hieu-He-thong-Lesson-2-Introduction-to-systems-Hoang-Gia-Hung-UETPhạm Văn ChiếnNo ratings yet
- Numerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel RaveDocument44 pagesNumerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel Raveanirbanpwd76No ratings yet
- 2015 Preparatory Notes: Australian Chemistry Olympiad (Acho)Document44 pages2015 Preparatory Notes: Australian Chemistry Olympiad (Acho)kevNo ratings yet
- MAE653 Sp10 Lesson06Document9 pagesMAE653 Sp10 Lesson06Edwin MachacaNo ratings yet
- Advanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsDocument4 pagesAdvanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsKasapaNo ratings yet
- Assignment 1 - Dicrete MathDocument9 pagesAssignment 1 - Dicrete MathNguyên VũNo ratings yet
- Whole Digital Communication PPT-libreDocument319 pagesWhole Digital Communication PPT-librePiyush GuptaNo ratings yet
- Chapter 1 - Modelling, Computers and Error AnalysisDocument35 pagesChapter 1 - Modelling, Computers and Error AnalysisAzmiHafifiNo ratings yet
- Chapter 5Document5 pagesChapter 5Dhynelle MuycoNo ratings yet
- Solutions Classical Dynamics of Particles and Systems 5edDocument496 pagesSolutions Classical Dynamics of Particles and Systems 5edRicardo Vega100% (6)
- Csci2100a Estr2102 HWDocument135 pagesCsci2100a Estr2102 HWAsdasd SdasNo ratings yet
- Numerical Programming I (For CSE) : Final ExamDocument8 pagesNumerical Programming I (For CSE) : Final ExamhisuinNo ratings yet
- Chi Square Test in WekaDocument40 pagesChi Square Test in WekaMahiye Ghosh67% (3)
- Linear A L1Document10 pagesLinear A L1O OmNo ratings yet
- 420 ExamclosedandopenbookquestionsDocument26 pages420 ExamclosedandopenbookquestionsJay Tran100% (1)
- State Space Representation Part-1Document47 pagesState Space Representation Part-1SingappuliNo ratings yet
- Some Operation Equation and ApplicationsDocument10 pagesSome Operation Equation and ApplicationsIJMERNo ratings yet
- Fuzzy Sets SystemsDocument87 pagesFuzzy Sets SystemsAnjan DebnathNo ratings yet
- HW 3 SolutionDocument10 pagesHW 3 SolutionEddie Martinez Jr.100% (1)
- Lect7 PDFDocument71 pagesLect7 PDFerjaimin89No ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Zether: Towards Privacy in A Smart Contract WorldDocument49 pagesZether: Towards Privacy in A Smart Contract WorldDung Quoc VanNo ratings yet
- Protocol Whitepaper V1.0: January 2020Document23 pagesProtocol Whitepaper V1.0: January 2020Dung Quoc VanNo ratings yet
- Schedule of Fees: 2020 - 2021 Academic YearDocument2 pagesSchedule of Fees: 2020 - 2021 Academic YearDung Quoc VanNo ratings yet
- 11 FibonacciDocument2 pages11 FibonacciDung Quoc VanNo ratings yet
- Overlays For Live Internet Multimedia Streaming Systems: Supervisor: Dr. Laurent MathyDocument40 pagesOverlays For Live Internet Multimedia Streaming Systems: Supervisor: Dr. Laurent MathyDung Quoc VanNo ratings yet
- Astm - D573.25993Document6 pagesAstm - D573.25993Bryan de BarrosNo ratings yet
- Examples of Balancing Method - Four-Run and Least-Squares Influence CoefficientsDocument44 pagesExamples of Balancing Method - Four-Run and Least-Squares Influence CoefficientsNguyen Anh TuNo ratings yet
- Teaching and Learning Plan (TLP) : S. P. Mandali'S Prin L. N. Welingkar Institute of Management Development & ResearchDocument6 pagesTeaching and Learning Plan (TLP) : S. P. Mandali'S Prin L. N. Welingkar Institute of Management Development & ResearchBhagath VarenyaNo ratings yet
- Solution Manual For Investment Science by David LuenbergerDocument94 pagesSolution Manual For Investment Science by David Luenbergerkoenajax96% (28)
- IFoA Directory of Actuarial Employers 2016-17-14102016Document22 pagesIFoA Directory of Actuarial Employers 2016-17-14102016Mian BialNo ratings yet
- Ata 34 Navigation 2Document69 pagesAta 34 Navigation 2omarmasaquizaNo ratings yet
- Gps Vehicle Tracker User Manual: PrefaceDocument13 pagesGps Vehicle Tracker User Manual: PrefaceFedericoNo ratings yet
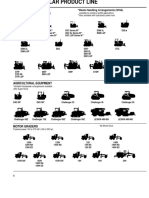
- Caterpillar Product Line 13Document7 pagesCaterpillar Product Line 13GenneraalNo ratings yet
- Awards Gold Medals Grade VIDocument11 pagesAwards Gold Medals Grade VIBernadeth Escosora DolorNo ratings yet
- Air Conditioner: Owner'S ManualDocument80 pagesAir Conditioner: Owner'S Manualfred MaxNo ratings yet
- QPT Charts BarDocument8 pagesQPT Charts BarKacak BergayaNo ratings yet
- PLX7100A Digital Mobile C-Arm X-Ray Machine: 1. Technical SpecificationDocument3 pagesPLX7100A Digital Mobile C-Arm X-Ray Machine: 1. Technical SpecificationAbdalhakeem AlturkyNo ratings yet
- 6100 SQ Lcms Data SheetDocument4 pages6100 SQ Lcms Data Sheet王皓No ratings yet
- Creative Computing v06 n12 1980 DecemberDocument232 pagesCreative Computing v06 n12 1980 Decemberdarkstar314No ratings yet
- Photo Luminescence of Surfaces and InterfacesDocument25 pagesPhoto Luminescence of Surfaces and InterfacesNick KellerNo ratings yet
- Study of Padmanabhapuram Palace TrivandrumDocument14 pagesStudy of Padmanabhapuram Palace Trivandrumcrustybubbles100% (2)
- BSS - Report - Effect of Heat in A Building DemonstratorDocument15 pagesBSS - Report - Effect of Heat in A Building DemonstratorAh Mok100% (1)
- API ISCAN-LITE ScannerDocument4 pagesAPI ISCAN-LITE Scannergrg_greNo ratings yet
- Customer DemandDocument42 pagesCustomer Demandtulika_ajwaniNo ratings yet
- Course 4 EDocument45 pagesCourse 4 ESzabolcs KovacsNo ratings yet
- DIO 1000 v1.1 - EN Op ManualDocument25 pagesDIO 1000 v1.1 - EN Op ManualMiguel Ángel Pérez FuentesNo ratings yet
- Evoked Potential Practice Exam - ProProfs QuizDocument23 pagesEvoked Potential Practice Exam - ProProfs QuizAnonymous 9lmlWQoDm8No ratings yet
- Ims PrecalDocument10 pagesIms PrecalRhea GlipoNo ratings yet
- SAT Practice Book 2009 2010Document204 pagesSAT Practice Book 2009 2010Fedrick Tharun T100% (1)
- 7.GSM ChannelsDocument24 pages7.GSM Channelsmanthasaikarthik100% (1)
- Origin and Structure of The EarthDocument8 pagesOrigin and Structure of The EarthRobin Suarez ViladoNo ratings yet
- RCC-DI-AC PipeDocument10 pagesRCC-DI-AC PipeNaveen NagisettiNo ratings yet
- Sci - Short Circuit IsolatorDocument2 pagesSci - Short Circuit IsolatorVictor MoraesNo ratings yet
- Solved Worksheet-Cell and Specialized Cells 3Document3 pagesSolved Worksheet-Cell and Specialized Cells 3Everything Everything100% (1)
- C V RamanDocument8 pagesC V RamanJayesh KomalwarNo ratings yet