You might also like
- Mechatronics: Designing Intelligent Machines Volume 1: Perception, Cognition and ExecutionFrom EverandMechatronics: Designing Intelligent Machines Volume 1: Perception, Cognition and ExecutionRating: 4.5 out of 5 stars4.5/5 (3)
- Unit 2 Industrial Robotics: Learning ObjectivesDocument42 pagesUnit 2 Industrial Robotics: Learning ObjectivesKontham VivekNo ratings yet
- RoboticsDocument594 pagesRoboticsChristian Halim79% (14)
- 00 Robotics Lec00Document14 pages00 Robotics Lec00Furkan KirmaciNo ratings yet
- RoboticsDocument37 pagesRobotics9944805552No ratings yet
- Lecture 2-2: Robotics Robotics and and Automation AutomationDocument8 pagesLecture 2-2: Robotics Robotics and and Automation Automationharikiran3285No ratings yet
- Robotics ProgrammingDocument32 pagesRobotics ProgrammingDjuraTheHarpYNo ratings yet
- Field RoboticsDocument70 pagesField RoboticsSkanda SwaroopNo ratings yet
- Robotics 2markDocument14 pagesRobotics 2markisirajudeen17No ratings yet
- 2012-1813. DH Representation - ExamplesDocument42 pages2012-1813. DH Representation - Examplesmodisuryaharsha100% (1)
- RObotics and Automation Question Bank AnDocument19 pagesRObotics and Automation Question Bank AnSharmila83No ratings yet
- Industrial RobotsDocument88 pagesIndustrial Robotsdtuc100% (2)
- Inverse Kinematic Analysis of Robot Manipulators PDFDocument336 pagesInverse Kinematic Analysis of Robot Manipulators PDFManuel Caeiro0% (1)
- Robotics Part3Document87 pagesRobotics Part3Dheeraj RajNo ratings yet
- Industrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeDocument73 pagesIndustrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeSiddharth Gupta0% (1)
- Industrial RoboticsDocument77 pagesIndustrial RoboticsIslam Fouad100% (4)
- Chapter 3 C DH Representation For Robotic ManipulatorsDocument88 pagesChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- Robotics Lab Manuals Final PDFDocument38 pagesRobotics Lab Manuals Final PDFravihbti100% (1)
- EncoderDocument44 pagesEncoderdaiduongxanh14113No ratings yet
- Robotics TeachingPlan BoSE&TC KBCDocument2 pagesRobotics TeachingPlan BoSE&TC KBCvydeo100% (1)
- Control of Robot ManipulatorsDocument441 pagesControl of Robot ManipulatorsDomagoj Majstorović100% (1)
- SCARA Robot KinematicsDocument5 pagesSCARA Robot KinematicsPrasanth Kurapati100% (3)
- 2 Marks Question & AnswerDocument9 pages2 Marks Question & AnswerShanmuga PriyaNo ratings yet
- Robot Manual Peter CorkeDocument101 pagesRobot Manual Peter Corkeingenioso23No ratings yet
- ME 2028 ROBOTICS-Questionbank Unit1&2Document2 pagesME 2028 ROBOTICS-Questionbank Unit1&2Karthick RamNo ratings yet
- OIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)Document13 pagesOIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)MICHEL RAJNo ratings yet
- Robotics NotesDocument22 pagesRobotics NotesUpendra020% (1)
- An Introduction To Robotic ManipulatorsDocument29 pagesAn Introduction To Robotic ManipulatorsAyush_Rai_2506No ratings yet
- Introduction To ROBOTICSDocument25 pagesIntroduction To ROBOTICSNyandaMadili MalashiNo ratings yet
- Robot Programming LanguagesDocument22 pagesRobot Programming LanguagesD.Ezhil ArasanNo ratings yet
- Robot ArchitecturesDocument72 pagesRobot ArchitecturesRyder Jhymsen50% (2)
- Robotics Programming and ApplicationsDocument38 pagesRobotics Programming and ApplicationsShanti Lal MeenaNo ratings yet
- RoboticsDocument41 pagesRoboticsMark Jason100% (3)
- Robot Programming - PART1Document48 pagesRobot Programming - PART1Krushnasamy SuramaniyanNo ratings yet
- RoboticsDocument143 pagesRoboticsDr_M_Soliman75% (4)
- Industrial RoboticsDocument30 pagesIndustrial RoboticsKiran VargheseNo ratings yet
- Trajectory Tracking For SCARA Robots With Compliant Transmissions: A Technique To Improve The Positioning PrecisionDocument3 pagesTrajectory Tracking For SCARA Robots With Compliant Transmissions: A Technique To Improve The Positioning PrecisionChandan KanuNo ratings yet
- CCCCCCCCCCC C C C C CCCCCCC CCCCCCCCCCCCCCCCCCCP P PDocument21 pagesCCCCCCCCCCC C C C C CCCCCCC CCCCCCCCCCCCCCCCCCCP P PPreethish GuhaNo ratings yet
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyDocument30 pagesAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Robotics: Faculty of Engineering Computer Engineering Department Subject: Robotics / Grade 4Document14 pagesRobotics: Faculty of Engineering Computer Engineering Department Subject: Robotics / Grade 4Aalaa HasanNo ratings yet
- Robotics and Control by MittalDocument186 pagesRobotics and Control by Mittalsujay nayakNo ratings yet
- IC6003-Principles of RoboticsDocument15 pagesIC6003-Principles of Roboticsrajemtech100% (1)
- Robotics Toolbox For MATLAB Rel6Document6 pagesRobotics Toolbox For MATLAB Rel6Eduardo RodríguezNo ratings yet
- Serial & Parallel Robot Manipulators - KucukDocument468 pagesSerial & Parallel Robot Manipulators - KucukPepe FCNo ratings yet
- Robotics Handouts-Part1 PDFDocument25 pagesRobotics Handouts-Part1 PDFCarmela FranchescaNo ratings yet
- IAE Robotics Course DescriptionDocument6 pagesIAE Robotics Course Descriptionsatheesh kumarNo ratings yet
- Robotics Notes1Document19 pagesRobotics Notes1Prince PavanNo ratings yet
- Industrial RoboticsDocument30 pagesIndustrial RoboticssoniyagoyalNo ratings yet
- Fundamentals of Robotics: Chapter TopicsDocument19 pagesFundamentals of Robotics: Chapter TopicsGodfrey KayomboNo ratings yet
- Chapter 2Document18 pagesChapter 2Princes OfattackerNo ratings yet
- Parts of A Robot, DOF, Classifying Robots PDFDocument71 pagesParts of A Robot, DOF, Classifying Robots PDFAswath SridharNo ratings yet
- Lecture Robotics1Document33 pagesLecture Robotics1N MNo ratings yet
- Manipulator Dynamics:: Appendix ADocument12 pagesManipulator Dynamics:: Appendix AAnonymous Ia9LPzNo ratings yet
- AMS 328 CH 2Document27 pagesAMS 328 CH 2dnew507033No ratings yet
- Seminar Presentation On Controllers, Actuators and Control SystemsDocument30 pagesSeminar Presentation On Controllers, Actuators and Control SystemsOdinma AzuonwuNo ratings yet
- S7beme22a9 RoboticsDocument38 pagesS7beme22a9 Robotics976593274No ratings yet
- 2 Scsa1406 PDFDocument107 pages2 Scsa1406 PDFKIran MohanNo ratings yet
- Mechanical Structural Analysis AND Design Optimization: OF Industrial RobotsDocument29 pagesMechanical Structural Analysis AND Design Optimization: OF Industrial RobotsAhsan AmjadNo ratings yet
- 5-2-Robotics - AbkDocument43 pages5-2-Robotics - Abkfree0332hNo ratings yet
- Lect 1Document38 pagesLect 1Chilton FernandesNo ratings yet
- Birthday Stories: Translation Rights Sold by Haruki MurakamiDocument1 pageBirthday Stories: Translation Rights Sold by Haruki MurakamidharshanirymondNo ratings yet
- 127 812.8 R127.0 102 152 356 177.8 R12 Typ: Isometric View SCALE 1:15Document2 pages127 812.8 R127.0 102 152 356 177.8 R12 Typ: Isometric View SCALE 1:15dharshanirymondNo ratings yet
- PH D Information Brochure (18032013)Document17 pagesPH D Information Brochure (18032013)dharshanirymondNo ratings yet
- Module 9 - RoboticsDocument20 pagesModule 9 - RoboticsdharshanirymondNo ratings yet
- TRB Syllabus For EEEDocument2 pagesTRB Syllabus For EEEdharshanirymondNo ratings yet
- Electrical 2013 PDFDocument5 pagesElectrical 2013 PDFdharshanirymondNo ratings yet
- Masoneilan Control Valve Sizing PDFDocument32 pagesMasoneilan Control Valve Sizing PDFOwen Hennessy100% (1)
- PSP 328Document2 pagesPSP 328dharshanirymondNo ratings yet
- Position Applied For in The Department ofDocument2 pagesPosition Applied For in The Department ofdharshanirymondNo ratings yet
- Neural Network Based Model Reference Adaptive Control For Ship Steering SystemDocument8 pagesNeural Network Based Model Reference Adaptive Control For Ship Steering SystemdharshanirymondNo ratings yet
- Cooling Tower SolutionDocument38 pagesCooling Tower SolutionThabangNo ratings yet
- Common Rail System Diesel Engine Technology PDFDocument26 pagesCommon Rail System Diesel Engine Technology PDFFedima100% (1)
- Suction Pile SpecDocument33 pagesSuction Pile Specriaz16shaik100% (1)
- Section 32150 - Bonded Epoxy LiningDocument11 pagesSection 32150 - Bonded Epoxy LininghelalsolimanNo ratings yet
- Example 2a: All-Round Fillet Weld Connection Between I Beam and Plate (Simple)Document6 pagesExample 2a: All-Round Fillet Weld Connection Between I Beam and Plate (Simple)Imran SaikatNo ratings yet
- 2.0 MZR-CD Engine Lubrication SystemDocument20 pages2.0 MZR-CD Engine Lubrication SystemPablo De Miguel GonzálezNo ratings yet
- Deformacao AxialDocument31 pagesDeformacao AxialANTONIONo ratings yet
- TacheuchiTB1140 S51400007 - ServiceDocument652 pagesTacheuchiTB1140 S51400007 - ServiceStelian CrisanNo ratings yet
- Measuring InstrumentsDocument10 pagesMeasuring Instrumentsmohsin931No ratings yet
- Test ValueDocument2 pagesTest Valueคุณชายธวัชชัย เจริญสุข100% (2)
- 5f9accc0f3f8f455bebc45f3 - 94 Shkolnik, Alexander - Final PaperDocument13 pages5f9accc0f3f8f455bebc45f3 - 94 Shkolnik, Alexander - Final PaperpeterNo ratings yet
- PROBLEM 17.137: SolutionDocument7 pagesPROBLEM 17.137: SolutiontaNo ratings yet
- Technical Specifications For ValvesDocument32 pagesTechnical Specifications For ValvesEr Hussain GhadialiNo ratings yet
- SwissDocument8 pagesSwissRajaram RamanNo ratings yet
- Air Cleaner and Air Intake Parts Models With Turbocharged EngineDocument2 pagesAir Cleaner and Air Intake Parts Models With Turbocharged EngineNeftali FuentesNo ratings yet
- Eccentric ConnecctionsDocument41 pagesEccentric ConnecctionsShyam Suryawanshi100% (1)
- Fluids and LubricantsDocument2 pagesFluids and LubricantsRUN GONo ratings yet
- Data Base BaruDocument102 pagesData Base BaruAfif PrstyoNo ratings yet
- CEN TOOL Standard Padeyes V4 Rollup Padeye SheaveDocument5 pagesCEN TOOL Standard Padeyes V4 Rollup Padeye SheaveMarvan100% (1)
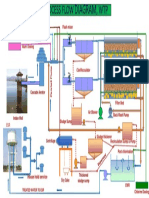
- WTP Process DiagramDocument1 pageWTP Process DiagramKumar AbhishekNo ratings yet
- Installation, Operation, Maintenance, Repair and Troubleshooting Instructions For THE ZSE Fire PumpDocument119 pagesInstallation, Operation, Maintenance, Repair and Troubleshooting Instructions For THE ZSE Fire PumpKashif MasudNo ratings yet
- Grundfosliterature 6014937 PDFDocument8 pagesGrundfosliterature 6014937 PDFIbrahima BANo ratings yet
- Revision Status: Details Accepted Prepared Rev Date Rev NRDocument49 pagesRevision Status: Details Accepted Prepared Rev Date Rev NRRupam BaruahNo ratings yet
- PC2 - Practice Exam WorkedDocument12 pagesPC2 - Practice Exam WorkednomsyNo ratings yet
- Schwing SP 500 EnglishDocument222 pagesSchwing SP 500 EnglishManuel Andres Manrique Lopez92% (12)
- The Laws of Motion: Physics Experiment Project Lab ReportDocument18 pagesThe Laws of Motion: Physics Experiment Project Lab Reportapi-335646206No ratings yet
- Determination of Blockage Correction in Open-Jet Wind TunnelDocument6 pagesDetermination of Blockage Correction in Open-Jet Wind Tunnelmoro1381100% (1)
- General Purpose Butterfly ValvesDocument2 pagesGeneral Purpose Butterfly Valvesphe zenNo ratings yet
- Hoja Técnica Roto Xtend Duty Fluid PDFDocument2 pagesHoja Técnica Roto Xtend Duty Fluid PDFFederico Liaudat100% (2)
- Wiring Layout For Dta EcuDocument5 pagesWiring Layout For Dta EcuJay Daffurn100% (3)