You might also like
- ApplicationDocument1 pageApplicationDhondiram Maruthi KakreNo ratings yet
- TransNum - Aug 04 - 095317 - Bank Statement PDFDocument5 pagesTransNum - Aug 04 - 095317 - Bank Statement PDFDhondiram Maruthi KakreNo ratings yet
- Paper 15Document3 pagesPaper 15Dhondiram Maruthi KakreNo ratings yet
- Class: SE: VPCOE, Baramati First Term Attendance Report 2015-2016 Department of Electrical EngineeringDocument16 pagesClass: SE: VPCOE, Baramati First Term Attendance Report 2015-2016 Department of Electrical EngineeringDhondiram Maruthi KakreNo ratings yet
- India'S Three Stage Nuclear ProgrammeDocument5 pagesIndia'S Three Stage Nuclear ProgrammeDhondiram Maruthi KakreNo ratings yet
- Sandip Randive Open PDFDocument1 pageSandip Randive Open PDFDhondiram Maruthi KakreNo ratings yet
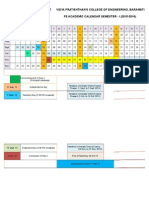
- Vidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Document4 pagesVidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Dhondiram Maruthi KakreNo ratings yet
- 2070 201505 PDFDocument1 page2070 201505 PDFDhondiram Maruthi KakreNo ratings yet
- Roll Call ListDocument21 pagesRoll Call ListDhondiram Maruthi KakreNo ratings yet
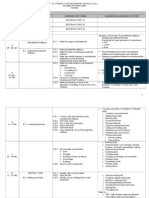
- Vidya Pratishthan'S College of Engineering, Baramati: Course PlanDocument2 pagesVidya Pratishthan'S College of Engineering, Baramati: Course PlanDhondiram Maruthi KakreNo ratings yet
- 2070 201506 PDFDocument1 page2070 201506 PDFDhondiram Maruthi KakreNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Test Bank Ais Accounting Information System Test Bank - Compress MCQ LangDocument15 pagesTest Bank Ais Accounting Information System Test Bank - Compress MCQ LangSharmaine LiasosNo ratings yet
- Marketing Final Project Blackberry Vs IphoneDocument18 pagesMarketing Final Project Blackberry Vs IphoneSalman MughalNo ratings yet
- Current Mode Bandgap ReferenceDocument22 pagesCurrent Mode Bandgap ReferenceSovan GhoshNo ratings yet
- Java Code Examples Org - Springframework.batch - Core.launch - Joblauncher.runDocument12 pagesJava Code Examples Org - Springframework.batch - Core.launch - Joblauncher.runBala KulandaiNo ratings yet
- Ch05 Architecture ToCDocument2 pagesCh05 Architecture ToCharishkodeNo ratings yet
- Book Name Authors Publisher Amazon LinkDocument2 pagesBook Name Authors Publisher Amazon LinkOmar ShahidNo ratings yet
- Hoewerkthet EngelsDocument10 pagesHoewerkthet EngelsLubna SubhanNo ratings yet
- PHP MySQLDocument85 pagesPHP MySQLDevendraNo ratings yet
- Departmental Models 641a UpgradeDocument13 pagesDepartmental Models 641a UpgradeKrish NarajNo ratings yet
- JNTUA B Tech 2018 3 1 Sup R15 ECE 15A04502 Digital Communication SystemsDocument1 pageJNTUA B Tech 2018 3 1 Sup R15 ECE 15A04502 Digital Communication SystemsHarsha NerlapalleNo ratings yet
- Advanced Scan I21no2Document29 pagesAdvanced Scan I21no2Jaiber SosaNo ratings yet
- IC Social Media Marketing Plan Template 8957Document5 pagesIC Social Media Marketing Plan Template 8957JamesNo ratings yet
- New Features Marvelous Designer 4Document45 pagesNew Features Marvelous Designer 4tiff4ne1100% (1)
- Hololens - Presentation With VideoDocument23 pagesHololens - Presentation With VideoAkshit GuptaNo ratings yet
- Ict Form 2Document12 pagesIct Form 2farah7No ratings yet
- IDOCs (For Functional Consultants - Set Up & Trouble Shooting)Document33 pagesIDOCs (For Functional Consultants - Set Up & Trouble Shooting)Rajat Kapoor100% (1)
- Introduction To Data Mining - Rev PDFDocument1 pageIntroduction To Data Mining - Rev PDFlhy20283No ratings yet
- Creating Quiz in Google ClassroomDocument39 pagesCreating Quiz in Google ClassroomPyin Nyar Aung MyayNo ratings yet
- JSON and XML EditorDocument3 pagesJSON and XML EditorAmira JilaliNo ratings yet
- Smith 1997Document5 pagesSmith 1997Lucas SantosNo ratings yet
- ShockLog Essentials v10 4Document79 pagesShockLog Essentials v10 4William Rubio AvilaNo ratings yet
- Datasheet D7050 B6 Data Sheet enUS 2706872715Document2 pagesDatasheet D7050 B6 Data Sheet enUS 2706872715Waldemar Alvares RezendeNo ratings yet
- 00 IntroductionDocument4 pages00 Introductionv_doina20023873No ratings yet
- DES NumericalDocument14 pagesDES NumericalAshish SharmaNo ratings yet
- PV CalculatorDocument18 pagesPV CalculatorHaroon RasheedNo ratings yet
- 45-53.8 11063344 PDFDocument40 pages45-53.8 11063344 PDFeng13No ratings yet
- MclustDocument57 pagesMclustfilip_nenadicNo ratings yet
- ISDN User PartDocument7 pagesISDN User Partomjaijagdish.raiNo ratings yet
- Effects of Social Media PDFDocument39 pagesEffects of Social Media PDFNur AdlinaNo ratings yet
- Online Photography Management System 1Document4 pagesOnline Photography Management System 1kamalshrish100% (1)