You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- JSW Toranagallu 24m Gallery DesignDocument5 pagesJSW Toranagallu 24m Gallery DesignvivekNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Lecture Notes On StaticsDocument121 pagesLecture Notes On StaticsМарко Шилобод75% (4)
- WBS-Engineering Project PlanDocument3 pagesWBS-Engineering Project PlanM iqbalNo ratings yet
- NPSHDocument17 pagesNPSHcrazynup100% (2)
- Radiation Detection & Measurement I: Types of DetectorsDocument35 pagesRadiation Detection & Measurement I: Types of Detectorssnoobper100% (1)
- HALCO - Dual PackerDocument86 pagesHALCO - Dual PackerIrwan Januar100% (2)
- Pump Basics1Document34 pagesPump Basics1sambasivammeNo ratings yet
- Nfpa 497 2012Document1 pageNfpa 497 2012Kaka Baba100% (1)
- Approved Suppliers List: SCM DepartmentDocument2 pagesApproved Suppliers List: SCM DepartmentAbdul MueedNo ratings yet
- Dry Van ManualDocument234 pagesDry Van ManualMichael Yoanito Oliviano100% (1)
- PM Installation Method of The M&E WorksDocument27 pagesPM Installation Method of The M&E WorksXozanNo ratings yet
- Mollie ChartDocument15 pagesMollie ChartKriz EarnestNo ratings yet
- Data Sheet - Overhead TravellingDocument4 pagesData Sheet - Overhead TravellingSugiarto SaptomoNo ratings yet
- N74 Engine Technical OverviewDocument51 pagesN74 Engine Technical OverviewChris Ce100% (3)
- EngData 203 Internet PDFDocument16 pagesEngData 203 Internet PDFMiguel MancillaNo ratings yet
- Lecture 11 FaberDocument20 pagesLecture 11 FaberSami SyedNo ratings yet
- LAMINATE CONSTITUTIVE EQUATIONSDocument29 pagesLAMINATE CONSTITUTIVE EQUATIONScrazynupNo ratings yet
- Darcy Weisbach FormulaDocument3 pagesDarcy Weisbach Formulasairam2234No ratings yet
- Stat 471: Lecture 7 Generalized Inverse.: Moo K. Chung Mchung@stat - Wisc.edu September 22, 2003Document1 pageStat 471: Lecture 7 Generalized Inverse.: Moo K. Chung Mchung@stat - Wisc.edu September 22, 2003crazynupNo ratings yet
- Matlab Tutorial 1Document28 pagesMatlab Tutorial 1Saeed Mahmood Gul KhanNo ratings yet
- Singular Value Decomposition SVD (1) : EEM3L1: Numerical and Analytical TechniquesDocument17 pagesSingular Value Decomposition SVD (1) : EEM3L1: Numerical and Analytical TechniquescrazynupNo ratings yet
- Boiling and CondensationDocument16 pagesBoiling and CondensationJunnaid NissarNo ratings yet
- Basics of Turbulent FlowDocument10 pagesBasics of Turbulent FlowlebrixNo ratings yet
- PP 1999 12Document4 pagesPP 1999 12hpmonNo ratings yet
- Notes-2nd Order ODE Pt1Document34 pagesNotes-2nd Order ODE Pt1Phan Vu HuyNo ratings yet
- Vector Spaces N-Dimensional Euclidean SpaceDocument11 pagesVector Spaces N-Dimensional Euclidean SpacecrazynupNo ratings yet
- Factual Topic On Fracture MechanicsDocument88 pagesFactual Topic On Fracture MechanicscrazynupNo ratings yet
- Linear Algebra and Matrix Theory: Part 4 - Eigenvalues and EigenvectorsDocument8 pagesLinear Algebra and Matrix Theory: Part 4 - Eigenvalues and EigenvectorscrazynupNo ratings yet
- Example of Two Dimensional ProblemDocument27 pagesExample of Two Dimensional ProblemCapt RezaNo ratings yet
- Cal 1Document14 pagesCal 1Happy KhanNo ratings yet
- 1 The Generalized Inverse: What Is The Generalized Inverse of A Matrix? Jeff Gill, Jgill@ucdavis - EduDocument4 pages1 The Generalized Inverse: What Is The Generalized Inverse of A Matrix? Jeff Gill, Jgill@ucdavis - EducrazynupNo ratings yet
- Teoría Básica de Transformada de Laplace PDFDocument127 pagesTeoría Básica de Transformada de Laplace PDFDoris Giovanna MitreNo ratings yet
- Reactor Plant For The Nervous and SymbioticDocument32 pagesReactor Plant For The Nervous and SymbioticcrazynupNo ratings yet
- Ov Notes MetalDocument27 pagesOv Notes MetalcrazynupNo ratings yet
- Advance em For The Effect of Postive Coeff of AnswerDocument16 pagesAdvance em For The Effect of Postive Coeff of AnswercrazynupNo ratings yet
- NWaste For The Record of KeepDocument40 pagesNWaste For The Record of KeepcrazynupNo ratings yet
- Sodium Hydride HandlingDocument9 pagesSodium Hydride HandlingAdamNo ratings yet
- Saes M 005Document25 pagesSaes M 005SKEPT.OMENOSNo ratings yet
- Mohenjo-daro's Planned City LayoutDocument7 pagesMohenjo-daro's Planned City LayoutAarti YadavNo ratings yet
- Saudi Arabian Oil Company: SECTION 15060 Chilled Water PipingDocument10 pagesSaudi Arabian Oil Company: SECTION 15060 Chilled Water Pipingthahar ali syedNo ratings yet
- Matias, Kyle F. - Assignment#3Document4 pagesMatias, Kyle F. - Assignment#3Kyle MatiasNo ratings yet
- Water-Cement Ratio and Concrete StrengthDocument3 pagesWater-Cement Ratio and Concrete StrengthDeep DebnathNo ratings yet
- A Script File For Mix Design of Structural Lightweight ConcreteDocument10 pagesA Script File For Mix Design of Structural Lightweight ConcreteMohamed Elshahat OudaNo ratings yet
- Triton RFET: Multi-Channel NDT System for Tube InspectionDocument2 pagesTriton RFET: Multi-Channel NDT System for Tube InspectionElyel GonzalezNo ratings yet
- Sanitary installation materials for university classroomDocument37 pagesSanitary installation materials for university classroomMikuNo ratings yet
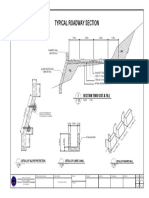
- Typical Roadway SectionDocument1 pageTypical Roadway SectionCarmela Ayessa PiguerraNo ratings yet
- Method Statement: Scope of WorkDocument8 pagesMethod Statement: Scope of WorkHaitham M A BecharaNo ratings yet
- Manufacturers DI Pipe in India, Ductile Iron Pipe Sector, India HDPE Pipe Manufacturing Cost-Ken ResearchDocument24 pagesManufacturers DI Pipe in India, Ductile Iron Pipe Sector, India HDPE Pipe Manufacturing Cost-Ken Researchkenresearch12No ratings yet
- Krone 4 Category 6Document18 pagesKrone 4 Category 6jose carlosNo ratings yet
- rr312404 Design of Machine ElementsDocument8 pagesrr312404 Design of Machine ElementsSRINIVASA RAO GANTANo ratings yet
- Designing A Wave Spring For Your Application: Sponsored byDocument2 pagesDesigning A Wave Spring For Your Application: Sponsored byJocaNo ratings yet
- ASTM A36 Carbon Structural Steel Plate SpecificatDocument1 pageASTM A36 Carbon Structural Steel Plate SpecificatAri sofyanNo ratings yet
- 17017R2 - Tampines N8C32 Precast PBUDocument3 pages17017R2 - Tampines N8C32 Precast PBURajuNo ratings yet
- QueryDocument2 pagesQueryTu PhamNo ratings yet
- Pressure Vessels Lectures 87Document1 pagePressure Vessels Lectures 87Adeel NizamiNo ratings yet
- Understanding Boat Design 101 PDFDocument1 pageUnderstanding Boat Design 101 PDFŁukasz ZygielNo ratings yet
- Plumbing Materials and FittingsDocument14 pagesPlumbing Materials and FittingsMarc PajaritoNo ratings yet
- Megapower's Extensive Range of PVC Conduit Fittings and Wiring AccessoriesDocument8 pagesMegapower's Extensive Range of PVC Conduit Fittings and Wiring AccessoriesChia Woon LimNo ratings yet
- Example 6.1 - Slab-Simply Supported (One-Way) PDFDocument5 pagesExample 6.1 - Slab-Simply Supported (One-Way) PDFnur100% (1)