You might also like
- CS LabReport 1Document9 pagesCS LabReport 1Muhammad AfzaalNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- Design Problem Matlab Project TFDocument19 pagesDesign Problem Matlab Project TFhumayun azizNo ratings yet
- Proportional and Derivative Control DesignDocument5 pagesProportional and Derivative Control Designahmed shahNo ratings yet
- PID Speed Control of DC MotorDocument5 pagesPID Speed Control of DC MotorSunil KumarNo ratings yet
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDocument10 pagesMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNo ratings yet
- 4150 Lab 3Document6 pages4150 Lab 3Tan Nguyen VanNo ratings yet
- Objectives:: Lab ReportDocument7 pagesObjectives:: Lab Reportraheel buttNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument14 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument14 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- PI Controller Design for DC MotorDocument4 pagesPI Controller Design for DC MotorsamielmadssiaNo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- Ee4302 Ca1Document51 pagesEe4302 Ca1Norul Ashikin NorzainNo ratings yet
- Fakultas Teknik Universitas Negeri Yogyakarta Digital Control SystemDocument9 pagesFakultas Teknik Universitas Negeri Yogyakarta Digital Control SystemErmin HamidovicNo ratings yet
- Lab 6Document3 pagesLab 6Vu LeNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- Lab2 UpdatedDocument5 pagesLab2 UpdatedSekar PrasetyaNo ratings yet
- Systems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversDocument6 pagesSystems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversColinSimNo ratings yet
- Higher National Diploma in Engineering: Assessment BriefDocument22 pagesHigher National Diploma in Engineering: Assessment BriefTân NguyễnNo ratings yet
- Experiment 1Document13 pagesExperiment 1Mike QuinteroNo ratings yet
- Ziegler Nichols Matlab PDFDocument8 pagesZiegler Nichols Matlab PDFMarco Arcos100% (2)
- Sample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Document8 pagesSample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Priyesh PandeyNo ratings yet
- Experiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemDocument3 pagesExperiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemSubhaNo ratings yet
- 8.1. Lab ObjectiveDocument6 pages8.1. Lab ObjectiveJang-Suh Justin LeeNo ratings yet
- Feedback and Control Systems Lab ManualDocument72 pagesFeedback and Control Systems Lab Manualmamaw231No ratings yet
- Control SystemsDocument32 pagesControl Systemsselvi0412100% (1)
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDocument8 pagesA Comparative Study of Several Control Techniques Applied To A Boost ConverterSerhat GümüşNo ratings yet
- Modeling and Control For DC Motor Using MatlabDocument15 pagesModeling and Control For DC Motor Using MatlabelneelNo ratings yet
- Pole Placement1Document46 pagesPole Placement1masd100% (1)
- MATLAB and Simulink Analysis of a Control System Transfer FunctionDocument14 pagesMATLAB and Simulink Analysis of a Control System Transfer Functionwanxin leiNo ratings yet
- Carleton University MAE 4500 Assignment A1 Due Oct 1 2010Document3 pagesCarleton University MAE 4500 Assignment A1 Due Oct 1 2010Ronak ChoudharyNo ratings yet
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Example: DC Motor Speed Modeling: Physical Setup and System EquationsDocument18 pagesExample: DC Motor Speed Modeling: Physical Setup and System EquationsĐức SinhNo ratings yet
- Modeling Separately Excited DC Generator & Armature Controlled DC Shunt Motor Transfer FunctionsDocument67 pagesModeling Separately Excited DC Generator & Armature Controlled DC Shunt Motor Transfer FunctionsaniruthNo ratings yet
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlDocument14 pagesMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloNo ratings yet
- Using An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsDocument5 pagesUsing An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsAnuruddha WijerathneNo ratings yet
- Matlab Basics Tutorial: Electrical and Electronic Engineering & Electrical and Communication Engineering StudentsDocument23 pagesMatlab Basics Tutorial: Electrical and Electronic Engineering & Electrical and Communication Engineering StudentssushantnirwanNo ratings yet
- Final Exam Version A-1Document2 pagesFinal Exam Version A-1ahmedabdulkarim554No ratings yet
- Cycle1 ManualDocument24 pagesCycle1 ManualSanthosh krishna. UNo ratings yet
- lab reportالدردارDocument9 pageslab reportالدردارhadel.adel.abedNo ratings yet
- USE MATLAB/SIMULINK/SCILAB/LABVIEW (Use Any One Tool)Document7 pagesUSE MATLAB/SIMULINK/SCILAB/LABVIEW (Use Any One Tool)SanthoshNo ratings yet
- DC Motor Speed: Digital Controller Design: Eng Mohamed DobaDocument20 pagesDC Motor Speed: Digital Controller Design: Eng Mohamed DobaEng. Ibrahim Abdullah AlruhmiNo ratings yet
- Introduction: PID Controller Design: SystemDocument14 pagesIntroduction: PID Controller Design: SystemRantharu AttanayakeNo ratings yet
- ps3 (1) From MAE 4780Document5 pagesps3 (1) From MAE 4780fooz10No ratings yet
- DCS Lab 8 Report (Zain, Umer, Abdullah)Document14 pagesDCS Lab 8 Report (Zain, Umer, Abdullah)Muhammad UmerNo ratings yet
- Design, Simulation and Experiment of a PID Controller for a Buck ConverterDocument8 pagesDesign, Simulation and Experiment of a PID Controller for a Buck ConverterOdair TrujilloNo ratings yet
- Linear Control Engineering QBDocument11 pagesLinear Control Engineering QBAkizuki TakaoNo ratings yet
- Activity01 (1) CarreonDocument14 pagesActivity01 (1) CarreonHaja Kiev Erenz CarreonNo ratings yet
- Delft: Matlab and Simulink For Modeling and ControlDocument12 pagesDelft: Matlab and Simulink For Modeling and Controlawan_krNo ratings yet
- Lab # 8 Control SystemDocument10 pagesLab # 8 Control SystemZabeehullahmiakhailNo ratings yet
- Lab # 8 SolvedDocument10 pagesLab # 8 SolvedZabeehullahmiakhailNo ratings yet
- Control ReportDocument15 pagesControl ReportKenshow Large50% (2)
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- ABB Logic RelaysDocument24 pagesABB Logic RelaysAndy Meyer0% (1)
- Cm-Pfe: Three-Phase Monitoring RelayDocument8 pagesCm-Pfe: Three-Phase Monitoring RelayAndy MeyerNo ratings yet
- Z TransformationDocument77 pagesZ TransformationAndy MeyerNo ratings yet
- The Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerDocument5 pagesThe Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerAndy MeyerNo ratings yet
- Bosch TrainingDocument17 pagesBosch TrainingAndy MeyerNo ratings yet
- The Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerDocument5 pagesThe Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerAndy MeyerNo ratings yet
- Artificial Neural Networks - : IntroductionDocument31 pagesArtificial Neural Networks - : IntroductionAndy MeyerNo ratings yet
- B Is Am BrochureDocument56 pagesB Is Am BrochureAndy MeyerNo ratings yet
- 4.2 - Risk Assessment ProjectDocument3 pages4.2 - Risk Assessment ProjectDaaim Wasim QureshiNo ratings yet
- Filter TutorialDocument15 pagesFilter TutorialNikitaPrabhuNo ratings yet
- Fuzzy Logic Speed Controllers Using FPGA Technique For Three-Phase Induction Motor DrivesDocument114 pagesFuzzy Logic Speed Controllers Using FPGA Technique For Three-Phase Induction Motor DrivesAndy MeyerNo ratings yet
- An Introduction To Digital Filters - IntersilDocument10 pagesAn Introduction To Digital Filters - IntersilRox AlfaroNo ratings yet
- DC Motor Speed ControlDocument54 pagesDC Motor Speed ControlAndy MeyerNo ratings yet
- The Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerDocument5 pagesThe Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerAndy MeyerNo ratings yet
- Ijetae 0312 50Document5 pagesIjetae 0312 50Andy MeyerNo ratings yet
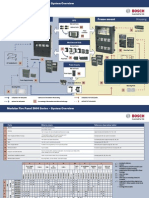
- FPA5000WithFunc Special SystemOverview EnUS T7007212171Document2 pagesFPA5000WithFunc Special SystemOverview EnUS T7007212171Andy MeyerNo ratings yet
- Design and Implementation of Adaptive Fuzzy Controller For Speed Control of Brushless DC MotorsDocument6 pagesDesign and Implementation of Adaptive Fuzzy Controller For Speed Control of Brushless DC MotorsAndy MeyerNo ratings yet
- PanelController InstructionBook EnUS T5537352203Document94 pagesPanelController InstructionBook EnUS T5537352203Andy MeyerNo ratings yet
- Alexander Smart MeterDocument31 pagesAlexander Smart MeterAndy MeyerNo ratings yet
- Chapter04 Z TransformDocument28 pagesChapter04 Z Transformohenri100No ratings yet
- Data Sheet enUS 1229198219Document2 pagesData Sheet enUS 1229198219Andy MeyerNo ratings yet
- Lecture No 1: Introduction to Microprocessors and Von Neumann ArchitectureDocument30 pagesLecture No 1: Introduction to Microprocessors and Von Neumann ArchitectureAndy MeyerNo ratings yet
- Nyquist Stability CriterionDocument20 pagesNyquist Stability CriterionmoosuhaibNo ratings yet
- Information Theory and Coding: Linear Block CodesDocument38 pagesInformation Theory and Coding: Linear Block CodesAndy MeyerNo ratings yet
- Radiation Meters EMR-200, EMR-300Document4 pagesRadiation Meters EMR-200, EMR-300Andy MeyerNo ratings yet
- An Example of Ipv6 Necessity in An Example of Ipv6 Necessity in The Greek School NetworkDocument11 pagesAn Example of Ipv6 Necessity in An Example of Ipv6 Necessity in The Greek School NetworkAndy MeyerNo ratings yet
- What Is A Data LoggerDocument2 pagesWhat Is A Data LoggerParthiban ThirunaNo ratings yet
- Router ConfigurationDocument25 pagesRouter ConfigurationVim AlNo ratings yet
- Qdoc - Tips Select Readings 2nd Pre IntermediateDocument178 pagesQdoc - Tips Select Readings 2nd Pre IntermediateFarzana BatoolNo ratings yet
- Quality Policy Nestle PDFDocument6 pagesQuality Policy Nestle PDFJonathan KacouNo ratings yet
- Physics Collision Lesson PlanDocument4 pagesPhysics Collision Lesson PlanLuna Imud50% (4)
- The Benefits of Radio Broadcasting As Perceived by The People in Rural AreasDocument10 pagesThe Benefits of Radio Broadcasting As Perceived by The People in Rural AreasMaeNo ratings yet
- Audit of Organizational Communication NetworksDocument17 pagesAudit of Organizational Communication NetworksLissette ObleaNo ratings yet
- Cricket Bat Thesis - 2006 SymesDocument297 pagesCricket Bat Thesis - 2006 SymesAnonymous unj3NHW82vNo ratings yet
- Motenergy Me1507 Technical DrawingDocument1 pageMotenergy Me1507 Technical DrawingHilioNo ratings yet
- USAF Electronic Warfare (1945-5)Document295 pagesUSAF Electronic Warfare (1945-5)CAP History LibraryNo ratings yet
- IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. COM-34, NO. 5 , MAY 1986A BPSK/QPSK Timing-Error DetectorDocument7 pagesIEEE TRANSACTIONS ON COMMUNICATIONS, VOL. COM-34, NO. 5 , MAY 1986A BPSK/QPSK Timing-Error DetectorFahmi MuradNo ratings yet
- Learning OrganizationDocument104 pagesLearning Organizationanandita28100% (2)
- Summary and RecommendationsDocument68 pagesSummary and Recommendationssivabharathamurthy100% (2)
- SEM GuideDocument98 pagesSEM GuideMustaque AliNo ratings yet
- Notes On Unit - 4 - Employees Roles in Service MarketingDocument3 pagesNotes On Unit - 4 - Employees Roles in Service MarketingSridhar Gowda67% (3)
- Question 1: Bezier Quadratic Curve Successive Linear Interpolation EquationDocument4 pagesQuestion 1: Bezier Quadratic Curve Successive Linear Interpolation Equationaushad3mNo ratings yet
- Syllabus in Study and Thinking SkillsDocument5 pagesSyllabus in Study and Thinking SkillsEnrique Magalay0% (1)
- Handbook Fof Social MobilizationDocument32 pagesHandbook Fof Social MobilizationAnith BaylisNo ratings yet
- SPM Literature in English Tips + AdviseDocument2 pagesSPM Literature in English Tips + AdviseJessica NgNo ratings yet
- Electric Submersible Pumps For The Petroleum IndustryDocument20 pagesElectric Submersible Pumps For The Petroleum Industrysouthli100% (1)
- Propagating Trees and Fruit Trees: Sonny V. Matias TLE - EA - TeacherDocument20 pagesPropagating Trees and Fruit Trees: Sonny V. Matias TLE - EA - TeacherSonny MatiasNo ratings yet
- U.S. Copyright Renewals, 1962 January - June by U.S. Copyright OfficeDocument471 pagesU.S. Copyright Renewals, 1962 January - June by U.S. Copyright OfficeGutenberg.orgNo ratings yet
- AbDocument13 pagesAbSk.Abdul NaveedNo ratings yet
- SplunkCloud-6 6 3-SearchTutorial PDFDocument103 pagesSplunkCloud-6 6 3-SearchTutorial PDFanonymous_9888No ratings yet
- Scheduling BODS Jobs Sequentially and ConditionDocument10 pagesScheduling BODS Jobs Sequentially and ConditionwicvalNo ratings yet
- Methods of Data Collection: Primary, Secondary, Observation, Interview & QuestionnaireDocument19 pagesMethods of Data Collection: Primary, Secondary, Observation, Interview & QuestionnairePraveen Nair100% (2)
- MATHMATICAL Physics Book Career EndaevourDocument293 pagesMATHMATICAL Physics Book Career EndaevourSwashy Yadav100% (1)
- Vblock® Systems Password ManagementDocument22 pagesVblock® Systems Password ManagementVakul BhattNo ratings yet
- Work From Home Policy LeadsquaredDocument5 pagesWork From Home Policy LeadsquaredAnthonyNo ratings yet
- SQ3R Is A Reading Strategy Formed From Its LettersDocument9 pagesSQ3R Is A Reading Strategy Formed From Its Letterschatura1989No ratings yet
- Thinking Maps in Writing Project in English For Taiwanese Elementary School StudentsDocument22 pagesThinking Maps in Writing Project in English For Taiwanese Elementary School StudentsThilagam MohanNo ratings yet