You might also like
- Technical: Engine Blueprinting 101 - Part OneDocument4 pagesTechnical: Engine Blueprinting 101 - Part OneRussell GouldenNo ratings yet
- Formula Michigan 2018 Event GuideDocument76 pagesFormula Michigan 2018 Event GuideGonzaloNo ratings yet
- Puma Race Engines PDFDocument8 pagesPuma Race Engines PDFpichaidvNo ratings yet
- Ducati 1199 Panigale Superquadro Engine - Over Square Design and Huge Power PDFDocument7 pagesDucati 1199 Panigale Superquadro Engine - Over Square Design and Huge Power PDFSarindran RamayesNo ratings yet
- NSF250R PRESS INFORMATIONDocument24 pagesNSF250R PRESS INFORMATIONGuy ProcterNo ratings yet
- Honda's Secret MotoGP Transmission Revealed - Sport Rider Magazine - MobileDocument2 pagesHonda's Secret MotoGP Transmission Revealed - Sport Rider Magazine - Mobilelusso9567No ratings yet
- (Slides) - DESMODROMIC A Distinctiveness of The Ducati EnginesDocument29 pages(Slides) - DESMODROMIC A Distinctiveness of The Ducati EnginesFabio Guedes100% (1)
- Exhaustec FeaturesDocument10 pagesExhaustec Featuresss2mrattriNo ratings yet
- Mikunibsr 42Document13 pagesMikunibsr 42José Sousa100% (1)
- OptimumK Help FileDocument302 pagesOptimumK Help FileRizny Adam LebbeNo ratings yet
- Diagrams of Racing MotorcycleDocument6 pagesDiagrams of Racing MotorcycleRenan AlvesNo ratings yet
- Application of Magic Formula Tire Model To Motorcycle Maneuverability AnalysisDocument6 pagesApplication of Magic Formula Tire Model To Motorcycle Maneuverability AnalysisliezardNo ratings yet
- Toyota Motorsport GMBH - The Home of High PerformanceDocument27 pagesToyota Motorsport GMBH - The Home of High PerformanceMarcos SoarNo ratings yet
- Hub Centres SteeringDocument29 pagesHub Centres SteeringSudheesh Kumar ENo ratings yet
- Retail Catalogue: DunloptyresDocument64 pagesRetail Catalogue: DunloptyresRobertNo ratings yet
- KTM Design and ResearchDocument31 pagesKTM Design and ResearchNandan NandyNo ratings yet
- HRC Manual - Honda NSR250R (MC28)Document48 pagesHRC Manual - Honda NSR250R (MC28)KICKERMAN360No ratings yet
- 7300 Penske ManualDocument26 pages7300 Penske ManualZhi Hou NgNo ratings yet
- 1931 The High Speed Internal Combustion Engine (Ricardo)Document445 pages1931 The High Speed Internal Combustion Engine (Ricardo)anhelo911No ratings yet
- Some Critical Technical Issues On The Steady Flow Testing of Cylinder HeadsDocument16 pagesSome Critical Technical Issues On The Steady Flow Testing of Cylinder HeadsPrateek SinghNo ratings yet
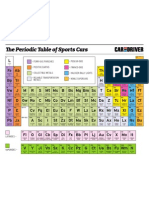
- The Periodic Table of Sports Cars Car and DriverDocument1 pageThe Periodic Table of Sports Cars Car and Drivergaby_munteanNo ratings yet
- RET Bellmouth SeptDocument4 pagesRET Bellmouth SeptPravin RajanNo ratings yet
- Puma Race Engines - Cylinder Head Modifications - Part 1: Valve SeatsDocument4 pagesPuma Race Engines - Cylinder Head Modifications - Part 1: Valve SeatsRobert DennisNo ratings yet
- Penske 7800 Technical ManualDocument12 pagesPenske 7800 Technical ManualgeorgeNo ratings yet
- Yamaha R6 Diagnostic ModeDocument6 pagesYamaha R6 Diagnostic ModeAdrian FernandezNo ratings yet
- Aprilia RS125 Dispelling MythsDocument7 pagesAprilia RS125 Dispelling MythsEdu Cernadas MíguezNo ratings yet
- Ford Intake Ports ReportDocument30 pagesFord Intake Ports ReportgosculptorNo ratings yet
- Dynomation - Users ManualDocument289 pagesDynomation - Users ManualisttNo ratings yet
- SAE Technical Paper FormatDocument2 pagesSAE Technical Paper FormatudaykanthNo ratings yet
- ZF Bro TN 2014 enDocument15 pagesZF Bro TN 2014 enMassahiro FilhoNo ratings yet
- CEV 2013 Technical Rules Moto3Document7 pagesCEV 2013 Technical Rules Moto3Steve DarcyNo ratings yet
- Where The Graphs Come FromDocument7 pagesWhere The Graphs Come FromRajaSekarsajjaNo ratings yet
- How To Emilminate Connecting Rod Failure Circle Track Eprint PDFDocument4 pagesHow To Emilminate Connecting Rod Failure Circle Track Eprint PDFCarlosManuelSilvaCorreiaNo ratings yet
- Nitto Legends Car SetupDocument111 pagesNitto Legends Car Setupm4rlon_rcNo ratings yet
- Contents:: Name:Veeravalli Sunil Varma ROLL NO:17221A0371Document9 pagesContents:: Name:Veeravalli Sunil Varma ROLL NO:17221A0371Sunil Varma VeeravalliNo ratings yet
- Kart Steering, Physical Forces and Setup - Theory and PracticeDocument6 pagesKart Steering, Physical Forces and Setup - Theory and PracticeFausto TrentiniNo ratings yet
- Honda x8rs Tuning GuideDocument2 pagesHonda x8rs Tuning GuideCarlos Garrido RegateroNo ratings yet
- Damper DynoDocument3 pagesDamper DynoEoin MurrayNo ratings yet
- A Study of Motorcycle Suspension Damping Characteristics - Gordon JenningsDocument12 pagesA Study of Motorcycle Suspension Damping Characteristics - Gordon JenningsGuillermo CondeNo ratings yet
- The Design of Competition EnginesDocument546 pagesThe Design of Competition EnginesJoão Victor Paschoal PoletiNo ratings yet
- DS L275eDocument2 pagesDS L275edespadaNo ratings yet
- Volkswagen FIA World Rally Championship Technology Information Package 2014Document38 pagesVolkswagen FIA World Rally Championship Technology Information Package 2014VWvortexNo ratings yet
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Document34 pagesAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryNo ratings yet
- Dinamica Del Veicolo IDocument87 pagesDinamica Del Veicolo ILe Anh TuanNo ratings yet
- Desmo Drom IDocument5 pagesDesmo Drom IWilliamNo ratings yet
- Balancing of Crankshaft of Four Cylinder Engine, Dynamics of Machine, Ratnesh Raman Pathak, LpuDocument36 pagesBalancing of Crankshaft of Four Cylinder Engine, Dynamics of Machine, Ratnesh Raman Pathak, LpuRatnesh Raman PathakNo ratings yet
- Performance Improvement of Two-Stroke Engine Using Orifice ControlDocument117 pagesPerformance Improvement of Two-Stroke Engine Using Orifice Controlrukmini_ramkiNo ratings yet
- Small Engine Dynamo TestingDocument11 pagesSmall Engine Dynamo TestingKhairil AnuarNo ratings yet
- Minsk Repair ManualDocument60 pagesMinsk Repair ManualDavid Mondragon100% (1)
- Carburettors Mikuni 33Document4 pagesCarburettors Mikuni 33Tegees TegeesovNo ratings yet
- M20 Displacement PDFDocument3 pagesM20 Displacement PDFgowrielNo ratings yet
- EFI Two StrokeDocument6 pagesEFI Two StrokegkarthikeyanNo ratings yet
- Fsae Exhaust ReportDocument8 pagesFsae Exhaust ReportGodwin JerryNo ratings yet
- Tribological Processes in the Valve Train Systems with Lightweight Valves: New Research and ModellingFrom EverandTribological Processes in the Valve Train Systems with Lightweight Valves: New Research and ModellingRating: 1.5 out of 5 stars1.5/5 (2)
- Design of Lightweight Disc Brake Using Finite Element Analysis and Taguschi TechniqueDocument11 pagesDesign of Lightweight Disc Brake Using Finite Element Analysis and Taguschi Techniquerudey18No ratings yet
- An Investigation of Disc Brake Rotor Using FeaDocument12 pagesAn Investigation of Disc Brake Rotor Using Fearudey18No ratings yet
- Crashworthiness Analysis of Fe Truck Chassis Model Using Ls - DynaDocument10 pagesCrashworthiness Analysis of Fe Truck Chassis Model Using Ls - Dynarudey18No ratings yet
- Entry Fee - 2018Document2 pagesEntry Fee - 2018rudey18No ratings yet
- Adams ChassisDocument4 pagesAdams Chassisrudey18100% (1)
- w10g - Passivated Bridge RectifierDocument3 pagesw10g - Passivated Bridge Rectifierrudey18No ratings yet
- Kbpc3504 Full Bridge RectifierDocument2 pagesKbpc3504 Full Bridge Rectifierrudey18No ratings yet
- Pre-Placement Class - Mba - Man TrucksDocument34 pagesPre-Placement Class - Mba - Man Trucksrudey18No ratings yet
- TDA8932B: 1. General DescriptionDocument48 pagesTDA8932B: 1. General Descriptionrudey18No ratings yet
- Br1010 Full Bridge RectifierDocument4 pagesBr1010 Full Bridge Rectifierrudey18No ratings yet
- NASCAR & Chemical Reactions!Document12 pagesNASCAR & Chemical Reactions!rudey18No ratings yet
- Performanceparameters 130314093018 Phpapp01Document19 pagesPerformanceparameters 130314093018 Phpapp01rudey18No ratings yet
- Mini Baja Lga340Document12 pagesMini Baja Lga340rudey18No ratings yet
- Sponsorship Booklet 2005Document9 pagesSponsorship Booklet 2005rudey18No ratings yet
- Academic Calendar 2014-15-15Document13 pagesAcademic Calendar 2014-15-15rudey18No ratings yet
- Classification of BusesDocument4 pagesClassification of Busesrudey18No ratings yet
- Brochure PT NVH 2014Document2 pagesBrochure PT NVH 2014rudey18No ratings yet
- University of Illinois at Chicago SAE Proposal 2007Document5 pagesUniversity of Illinois at Chicago SAE Proposal 2007rudey18No ratings yet
- Centrifugal Force Accelerate Apex Driver: Lateral AccelerationDocument2 pagesCentrifugal Force Accelerate Apex Driver: Lateral Accelerationrudey18No ratings yet
- Heritage CatalogDocument44 pagesHeritage CatalogHaitem FarganiNo ratings yet
- LDW 502 PDFDocument106 pagesLDW 502 PDFSashaNo ratings yet
- Abs Wabco HabsDocument20 pagesAbs Wabco HabsBom_Jovi_681No ratings yet
- Perkins 6.3544 and T6.3544 Diesel EnginesDocument40 pagesPerkins 6.3544 and T6.3544 Diesel EnginesArmando Orta75% (4)
- Sym Fiddle125 Service ManualDocument182 pagesSym Fiddle125 Service Manualdanielaat100% (1)
- Tfbrk-We-1211th 1st WSMW 120 TF Tis 12tfDocument271 pagesTfbrk-We-1211th 1st WSMW 120 TF Tis 12tfFamilia Avila FuentesNo ratings yet
- KTA50Document7 pagesKTA50Claudesson Nascimento RodriguesNo ratings yet
- BC15 18S-5 20SC-5 (Sb1087e09) PDFDocument260 pagesBC15 18S-5 20SC-5 (Sb1087e09) PDFGORDNo ratings yet
- Classification of Steam Engines: by ConstructionDocument22 pagesClassification of Steam Engines: by ConstructionI AM NOT CHINESENo ratings yet
- LTM 1030-2.1Document16 pagesLTM 1030-2.1김남균No ratings yet
- HD465 - 605-7 Vs CAT 773E - 777C ComparisonDocument29 pagesHD465 - 605-7 Vs CAT 773E - 777C ComparisonJokoNo ratings yet
- Cavalier ManualDocument108 pagesCavalier ManualHernandez Eduardo Daniel0% (1)
- Superb BrochureDocument10 pagesSuperb BrochuregoaltechNo ratings yet
- Samand: Service ManualDocument63 pagesSamand: Service ManualДмитрий ДимкаNo ratings yet
- Hudson-Essex: 1927 SupplementDocument24 pagesHudson-Essex: 1927 Supplementgume pesaNo ratings yet
- Stihl FS25-4 Service ManualDocument45 pagesStihl FS25-4 Service ManualJoshua RoyNo ratings yet
- Service Specifications Toyota ProboxDocument85 pagesService Specifications Toyota ProboxSimon Mwangi kabauNo ratings yet
- Camiones MACKDocument4 pagesCamiones MACKstevecabreraNo ratings yet
- SK81 Service Manual Left20170511Document1,141 pagesSK81 Service Manual Left20170511Johanns Sebastián100% (1)
- Epica Ecu 2 Conectores Diag Motor - Pag3Document42 pagesEpica Ecu 2 Conectores Diag Motor - Pag3luis gncco67% (6)
- Bajaj BM150 CatalogueDocument7 pagesBajaj BM150 CatalogueMK AutoNo ratings yet
- DDEC Fault CodesDocument5 pagesDDEC Fault CodesWalter100% (1)
- P2002 JF&Sierra - Parts CatalogueDocument128 pagesP2002 JF&Sierra - Parts Catalogueairsor100% (1)
- PC14R-3 S/N F40003 and UpDocument573 pagesPC14R-3 S/N F40003 and UpRAMON TEIXIDORNo ratings yet
- Lot Details For Lot 13-131: Description Product # Old Part # LOT Cond QTYDocument2 pagesLot Details For Lot 13-131: Description Product # Old Part # LOT Cond QTYpgm900No ratings yet
- Vehicle MaintenanceDocument5 pagesVehicle MaintenancevigneshkannaganesanNo ratings yet
- Volvo FM 420 4x2 TractorDocument8 pagesVolvo FM 420 4x2 TractorsaurabhNo ratings yet
- Meritor WABCO Hydraulic Anti-Lock Braking Systems (HABS) For Medium-Duty Trucks, Buses, and Motor Home ChassisDocument8 pagesMeritor WABCO Hydraulic Anti-Lock Braking Systems (HABS) For Medium-Duty Trucks, Buses, and Motor Home ChassisDieselkNo ratings yet
- Turbo Troubleshooting: & Damage AnalysisDocument1 pageTurbo Troubleshooting: & Damage AnalysisRooffNo ratings yet
- 3) 20 Interactive Questions On Engine CyclesDocument72 pages3) 20 Interactive Questions On Engine CyclesRowan WilsonNo ratings yet