You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Imo Signs: Safety Officer's GuideDocument60 pagesImo Signs: Safety Officer's Guidemarko nežićNo ratings yet
- Cochlear Implant Brand Comparison Latest Models OnlyDocument26 pagesCochlear Implant Brand Comparison Latest Models OnlyCorina Ruiz ParedesNo ratings yet
- Kelley Frontiers of History Historical Inquiry in The Twentieth Century PDFDocument311 pagesKelley Frontiers of History Historical Inquiry in The Twentieth Century PDFElias Jose PaltiNo ratings yet
- Chapter 5.2 Solutions - Numerical Analysis 9th EditionDocument1 pageChapter 5.2 Solutions - Numerical Analysis 9th EditionAmn RaheNo ratings yet
- Protect-RCS-O&M Manual PDFDocument53 pagesProtect-RCS-O&M Manual PDFsureshnfcl0% (1)
- 02-RF Electronics Kikkert Index PDFDocument5 pages02-RF Electronics Kikkert Index PDFkuazuNo ratings yet
- How To Set Control Voltage in An Application Circuit: PG2250T5NDocument3 pagesHow To Set Control Voltage in An Application Circuit: PG2250T5NkuazuNo ratings yet
- An 1030Document8 pagesAn 1030kuazuNo ratings yet
- Ansi 1005Document5 pagesAnsi 1005kuazuNo ratings yet
- An 1037Document4 pagesAn 1037kuazuNo ratings yet
- California Eastern Laboratories: Effects of Parasitics in Circuit SimulationsDocument5 pagesCalifornia Eastern Laboratories: Effects of Parasitics in Circuit SimulationskuazuNo ratings yet
- An 1026Document6 pagesAn 1026kuazuNo ratings yet
- An1022 PDFDocument12 pagesAn1022 PDFkuazuNo ratings yet
- An 1044Document16 pagesAn 1044kuazuNo ratings yet
- An1028 PDFDocument2 pagesAn1028 PDFkuazu100% (1)
- California Eastern LaboratoriesDocument10 pagesCalifornia Eastern LaboratorieskuazuNo ratings yet
- Upg2314T5N HBT Pa Ic For Bluetooth and Zigbee: California Eastern LaboratoriesDocument5 pagesUpg2314T5N HBT Pa Ic For Bluetooth and Zigbee: California Eastern LaboratorieskuazuNo ratings yet
- California Eastern Laboratories: Low Cost, High Performance Receiver For Wireless ApplicationsDocument4 pagesCalifornia Eastern Laboratories: Low Cost, High Performance Receiver For Wireless ApplicationskuazuNo ratings yet
- GVA62Document5 pagesGVA62kuazuNo ratings yet
- California Eastern Laboratories: Low Cost, High Performance Receiver For Wireless ApplicationsDocument4 pagesCalifornia Eastern Laboratories: Low Cost, High Performance Receiver For Wireless ApplicationskuazuNo ratings yet
- But You Shouldn't Effect An Affect - That's ActingDocument2 pagesBut You Shouldn't Effect An Affect - That's ActingAlex WhiteNo ratings yet
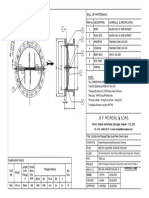
- Dual Plate 800 NB-ModelDocument1 pageDual Plate 800 NB-ModelTanmoy DuttaNo ratings yet
- SR5 TOOL Adept Powers List + Description, CompiledDocument5 pagesSR5 TOOL Adept Powers List + Description, Compiledvwp09705No ratings yet
- A Systematic Review of The Clinical Effectiveness and Cost-Effectiveness of Sensory, Psychological and Behavioural Interventions For Managing Agitation in Older Adults With DementiaDocument256 pagesA Systematic Review of The Clinical Effectiveness and Cost-Effectiveness of Sensory, Psychological and Behavioural Interventions For Managing Agitation in Older Adults With DementiaastrogliaNo ratings yet
- Asm International: Fall / Winter 2019 - 2020 CATALOGDocument32 pagesAsm International: Fall / Winter 2019 - 2020 CATALOGChoice OrganoNo ratings yet
- Lab Manual.15 PDFDocument34 pagesLab Manual.15 PDFBoovarahan ChakravarthyNo ratings yet
- 1 s2.0 S2214785321082912 MainDocument8 pages1 s2.0 S2214785321082912 MainAlex CaparóNo ratings yet
- How To Kill It at Law School - Harshil Vijayvargiya-Pages-8-15Document8 pagesHow To Kill It at Law School - Harshil Vijayvargiya-Pages-8-15VANSH CHOUHANNo ratings yet
- Scope and Sequence: Let's Start With ArtDocument4 pagesScope and Sequence: Let's Start With ArtPhương MaiNo ratings yet
- The Classical Theory of Distribution and Ricardian Rent: VIII: p.278-9)Document7 pagesThe Classical Theory of Distribution and Ricardian Rent: VIII: p.278-9)sandeep949No ratings yet
- 1 © 2008/2009 Pagan MoonbeamsDocument41 pages1 © 2008/2009 Pagan MoonbeamsRaven RinNo ratings yet
- Group Assignment Golden RatioDocument4 pagesGroup Assignment Golden RatioRIFAH FIDZDIANI AIN BINTI RIFKIY FS21110415No ratings yet
- New Product Development ProcessDocument12 pagesNew Product Development ProcessAyushi SinghNo ratings yet
- 985 AIME ProblemsDocument10 pages985 AIME ProblemsSarah Joy ManimtimNo ratings yet
- GulfSea Turbine Oil Series PDFDocument2 pagesGulfSea Turbine Oil Series PDFObydur RahmanNo ratings yet
- Installation Manual MaldivesDocument23 pagesInstallation Manual MaldivesutaiuliancatalinNo ratings yet
- Chapter-One: Signal and Systems 1. SignalsDocument437 pagesChapter-One: Signal and Systems 1. SignalsayadmanNo ratings yet
- BS 598-106Document7 pagesBS 598-106muhammad iqbalNo ratings yet
- Smart Speaker Synopsis For 6th SemDocument16 pagesSmart Speaker Synopsis For 6th SemSaurav MehtoNo ratings yet
- 27.M.E. Applied EleDocument47 pages27.M.E. Applied ElekalaiNo ratings yet
- No Flange Barometric Relief Damper: Application & DesignDocument3 pagesNo Flange Barometric Relief Damper: Application & DesignEduhar Jesus Vasquez FernandezNo ratings yet
- Regenerative Desiccant Dryers: KAD, KED and KBD SeriesDocument10 pagesRegenerative Desiccant Dryers: KAD, KED and KBD SeriesNaveen KumarNo ratings yet
- HFO HomeworkDocument2 pagesHFO HomeworkAna May Durante BaldelomarNo ratings yet
- The Valuation of Olive Orchards: A Case Study For TurkeyDocument4 pagesThe Valuation of Olive Orchards: A Case Study For TurkeyShailendra RajanNo ratings yet
- Color BookDocument24 pagesColor Booksd02No ratings yet