You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Questions & Answers On Capacitance and CapacitorsDocument113 pagesQuestions & Answers On Capacitance and Capacitorskibrom atsbha71% (14)
- Electricity From WalkingDocument8 pagesElectricity From WalkingSanthosh100% (6)
- ECG Peak DetectionDocument7 pagesECG Peak DetectionAmarnath M DamodaranNo ratings yet
- Digital Sensor I/O DriverDocument12 pagesDigital Sensor I/O DriverAmarnath M DamodaranNo ratings yet
- CAN Bus ESD Protection Diode (PESD2CAN)Document13 pagesCAN Bus ESD Protection Diode (PESD2CAN)Amarnath M Damodaran100% (1)
- System Level ESD Protection FAQDocument7 pagesSystem Level ESD Protection FAQAmarnath M DamodaranNo ratings yet
- AVR415: RC5 IR Remote Control Transmitter: 8-Bit Microcontroller Application NoteDocument8 pagesAVR415: RC5 IR Remote Control Transmitter: 8-Bit Microcontroller Application NoteØrova RaihanNo ratings yet
- CPR (Cardio Pulmonary Resuscitation)Document3 pagesCPR (Cardio Pulmonary Resuscitation)Amarnath M DamodaranNo ratings yet
- Unidirectional and Bidirectional TVS DevicesDocument2 pagesUnidirectional and Bidirectional TVS DevicesAmarnath M Damodaran100% (2)
- AVR Hardware Design ConsiderationsDocument14 pagesAVR Hardware Design ConsiderationsAmarnath M Damodaran100% (1)
- Decap PaperDocument4 pagesDecap PaperTanmoy RoyNo ratings yet
- Interfacing DDR SDRAM With Cyclone DevicesDocument42 pagesInterfacing DDR SDRAM With Cyclone DevicesAmarnath M DamodaranNo ratings yet
- Technical Note: TN-46-07 Ddr333 Design Guide For Two-Dimm SystemsDocument21 pagesTechnical Note: TN-46-07 Ddr333 Design Guide For Two-Dimm SystemsAmarnath M DamodaranNo ratings yet
- Uc 3909Document14 pagesUc 3909Amarnath M DamodaranNo ratings yet
- Photoelectric SensorDocument3 pagesPhotoelectric SensorAmarnath M DamodaranNo ratings yet
- Phantom GravityDocument41 pagesPhantom GravityAmarnath M DamodaranNo ratings yet
- Phantom GravityDocument41 pagesPhantom GravityAmarnath M DamodaranNo ratings yet
- Red GuideDocument33 pagesRed GuideAmarnath M DamodaranNo ratings yet
- Shark2 Operators Manual GenDocument88 pagesShark2 Operators Manual GenAmarnath M DamodaranNo ratings yet
- Manual Sharkv3.94Document86 pagesManual Sharkv3.94Amarnath M DamodaranNo ratings yet
- Chapter 2, Traffic Detector Handbook - Third Edition-Volume I - FHWA-HRT-06-108Document45 pagesChapter 2, Traffic Detector Handbook - Third Edition-Volume I - FHWA-HRT-06-108Amarnath M Damodaran100% (1)
- VFD Fundamentals & TroubleshootingDocument28 pagesVFD Fundamentals & TroubleshootingPrashanthi Balamurugan67% (3)
- MT 222Document3 pagesMT 222Amarnath M DamodaranNo ratings yet
- 17 99 1 PBDocument5 pages17 99 1 PBAmarnath M DamodaranNo ratings yet
- LMH 6611Document42 pagesLMH 6611Amarnath M DamodaranNo ratings yet
- Ilb Ilbb EnoteDocument5 pagesIlb Ilbb EnoteAmarnath M DamodaranNo ratings yet
- PanavisionSVI ELIS 1024A Datasheet PDS0004RevJDocument13 pagesPanavisionSVI ELIS 1024A Datasheet PDS0004RevJAmarnath M DamodaranNo ratings yet
- 185Document4 pages185Amarnath M DamodaranNo ratings yet
- MSP 430 F 2011Document93 pagesMSP 430 F 2011Amarnath M DamodaranNo ratings yet
- ADP1614Document20 pagesADP1614Amarnath M DamodaranNo ratings yet
- Single Ended Primary Inductor ConverterDocument4 pagesSingle Ended Primary Inductor ConverterAmarnath M DamodaranNo ratings yet
- Subsection 15 6 5 PDFDocument4 pagesSubsection 15 6 5 PDFAmarnath M DamodaranNo ratings yet
- PLL 565Document6 pagesPLL 565Dinesh Kumar MehraNo ratings yet
- SEMIKRONPowerSemiconductors PDFDocument466 pagesSEMIKRONPowerSemiconductors PDFasccorreaNo ratings yet
- TL 072 PDFDocument9 pagesTL 072 PDFJose M PeresNo ratings yet
- Chapter 3 - Semiconductor PN Junction Diode: Series Diode Configuration With DC InputsDocument4 pagesChapter 3 - Semiconductor PN Junction Diode: Series Diode Configuration With DC InputsVince Lester DP. De CastroNo ratings yet
- Rif 1 PDFDocument17 pagesRif 1 PDFNelson Naval CabingasNo ratings yet
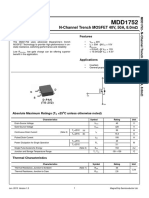
- MDD1752Document7 pagesMDD1752Homer Sadych Henao MarinNo ratings yet
- Capacitor Tantalio SMT 1206KEM T2005 T491Document24 pagesCapacitor Tantalio SMT 1206KEM T2005 T491Jeziel Vazquez NavaNo ratings yet
- Design and Implementation of A Discrete Controller For Soft Switching DC - DC ConverterDocument8 pagesDesign and Implementation of A Discrete Controller For Soft Switching DC - DC ConverterfoufouNo ratings yet
- 5101 Motor DriverDocument11 pages5101 Motor DriverMoise CristinaNo ratings yet
- TestDocument25 pagesTestsubha4studyNo ratings yet
- Operation Principles of Bi-Directional Full-Bridge DCDC Converter With Unified Soft-Switching Scheme and Soft-Starting CapabilityDocument8 pagesOperation Principles of Bi-Directional Full-Bridge DCDC Converter With Unified Soft-Switching Scheme and Soft-Starting CapabilityJie99No ratings yet
- VLSI C - V CharacteristicsDocument24 pagesVLSI C - V CharacteristicsMALATHI .LNo ratings yet
- Using TC74 Temp SensorDocument13 pagesUsing TC74 Temp SensorGaneshVenkatachalamNo ratings yet
- Irfz34, Sihfz34: Features Product SummaryDocument7 pagesIrfz34, Sihfz34: Features Product SummarySamia TouffaNo ratings yet
- Variable Frecuency Drives For Fans PDFDocument15 pagesVariable Frecuency Drives For Fans PDFReyes SanchezNo ratings yet
- DC SlidesDocument9 pagesDC SlidesMarlon BoucaudNo ratings yet
- XSTR Equivalentes PDFDocument62 pagesXSTR Equivalentes PDFReginaldoNo ratings yet
- Topics ElecDocument8 pagesTopics Elecmahum jamil100% (1)
- Reactive Power Compensation Using A Voltage Source GeneratorDocument10 pagesReactive Power Compensation Using A Voltage Source GeneratorkubikNo ratings yet
- Remote CodesDocument21 pagesRemote CodesBhavya .tNo ratings yet
- Decibels PDFDocument4 pagesDecibels PDFMarina CzuprynaNo ratings yet
- Samsung Mx-c630d Xer SMDocument62 pagesSamsung Mx-c630d Xer SMEdu Kees Morello100% (1)
- Test and MeasurementsDocument16 pagesTest and MeasurementsKimberly TaboraNo ratings yet
- WG B5.37 - Protection PDFDocument199 pagesWG B5.37 - Protection PDFnitinatp1978No ratings yet
- Report On Power SupplyDocument14 pagesReport On Power SupplyBhavesh MaheshwariNo ratings yet
- Unit 1 Notes TopperDocument33 pagesUnit 1 Notes TopperShashank BakshiNo ratings yet
- GKDocument48 pagesGKOmkar SheteNo ratings yet
- Soft-Error-Aware Read-Stability-Enhanced Low-Power 12T SRAM With Multi-Node Upset Recoverability For Aerospace ApplicationsDocument11 pagesSoft-Error-Aware Read-Stability-Enhanced Low-Power 12T SRAM With Multi-Node Upset Recoverability For Aerospace ApplicationsZhongpeng LiangNo ratings yet