Professional Documents
Culture Documents
Engineering Applied Math
Uploaded by
AnAgwgosCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Engineering Applied Math
Uploaded by
AnAgwgosCopyright:
Available Formats
Notes and Exercises in
Engineering Applied
Mathematics
Constantinos V. Chrysikopoulos
Department of Civil and Environmental Engineering
University of California, Irvine, CA 926972175
July, 2002
Corrected and Revised Edition
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS ii
Preface
The objective of this review course in Engineering Applied Mathematics is
to provide the fundamental mathematical background required for problem
solving in the various engineering elds. Emphasis is given on elegant math-
ematical tools usefull for analytical derivations, because the best method
of solution is always the analytical one. The lectures are designed for be-
ginning graduate or advanced undergraduate students in engineering and
applied sciences. It is assumed that the student is familiar with the deriva-
tion of ordinary and partial dierential equations from other courses in
engineering and applied science. As a result, the material is mainly focused
on the solution of these equations. It is also assumed that the student
has a good background in basic calculus and ordinary dierential equations
and has been introduced to linear algebra. Some familiarity with elemen-
tary aspects of partial dierential equations is desirable. Numerous useful
exercises together with complete solutions are presented in each topic.
c.v.c.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS iii
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS iv
Contents
Chapter 1
Introduction . . . . . . . . . . . . . . . . . . . . . 1
1.1 Creation and Solution of Engineering Models . . . . . . . . . . 1
1.2 Denitions . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Dierential Equations . . . . . . . . . . . . . . . . . . . 4
1.2.2 Ordinary Dierential Equations . . . . . . . . . . . . . . 4
1.2.3 Partial Dierential Equations . . . . . . . . . . . . . . . 5
1.2.4 Order . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.5 Linearity and Nonlinearity . . . . . . . . . . . . . . . . 6
1.2.6 Homogeneous Functions . . . . . . . . . . . . . . . . . . 6
1.2.7 Boundary and Initial Conditions . . . . . . . . . . . . . . 7
1.2.8 WellPosedness . . . . . . . . . . . . . . . . . . . . . 7
Chapter 2
Dierential Equations of the First Order . . . . . . . . . 9
2.1 Separable Dierential Equations . . . . . . . . . . . . . . . . 9
2.2 Reduction to Separable Form (Using Change of Variables) . . . 10
2.3 Exact Dierential Equations . . . . . . . . . . . . . . . . 11
2.4 Integrating Factors (I.F.) . . . . . . . . . . . . . . . . . . 14
2.5 The General Solution of a FirstOrder Ordinary
Dierential Equation . . . . . . . . . . . . . . . . . . . . 16
2.6 Bernoullis Equation . . . . . . . . . . . . . . . . . . . . 18
2.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . 20
Chapter 3
Fundamental and Important Properties of Linear
Ordinary Dierential Equations . . . . . . . . . . . . 23
3.1 Linear Dierential Equation of Order n . . . . . . . . . . . . 23
3.2 Superposition Principle . . . . . . . . . . . . . . . . . . . 24
3.3 Existence and Uniqueness Theorem . . . . . . . . . . . . . 24
3.4 Linear Independence . . . . . . . . . . . . . . . . . . . . 25
3.5 The Wronskian . . . . . . . . . . . . . . . . . . . . . . 25
3.6 Dierential Operators . . . . . . . . . . . . . . . . . . . 26
3.7 Fundamental Laws of Operation . . . . . . . . . . . . . . . 28
3.8 General Solution of a Nonhomogeneous Linear Equation
with Constant Coecients . . . . . . . . . . . . . . . . . 29
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS v
3.9 Homogeneous Solution . . . . . . . . . . . . . . . . . . . 29
3.9.1 Case 1: Roots All Real and Distinct . . . . . . . . . . . 29
3.9.2 Case 2: Roots are Complex . . . . . . . . . . . . . . . 30
3.9.3 Case 3: Repeated Roots . . . . . . . . . . . . . . . . . 30
3.10 Particular Solution . . . . . . . . . . . . . . . . . . . . 33
3.10.1 Method of Undetermined Coecients . . . . . . . . . . 33
3.10.2 Lagranges Idea (Introduction to Variation of Parameters) . 36
3.10.3 Variation of Parameters Method . . . . . . . . . . . . 37
3.11 Particular Solution by Inspection . . . . . . . . . . . . . . 42
3.12 Equations with Variable Coecients . . . . . . . . . . . . 43
3.12.1 EulerCauchy Equation . . . . . . . . . . . . . . . . 43
3.12.2 Another Approach . . . . . . . . . . . . . . . . . . 45
3.13 Case where One Solution is Known (Reduction of Order) . . . 47
3.14 Exercises . . . . . . . . . . . . . . . . . . . . . . . . 48
Chapter 4
Series Solutions of Dierential Equations . . . . . . . . . 49
4.1 Properties of Power Series . . . . . . . . . . . . . . . . . 49
4.2 Convergence of Power Series . . . . . . . . . . . . . . . . 50
4.3 Some Series Expansions . . . . . . . . . . . . . . . . . . 51
4.4 Operations on Power Series . . . . . . . . . . . . . . . . . 52
4.4.1 Termwise Dierentiation or Integration . . . . . . . . . . 52
4.4.2 Termwise Addition or Subtraction . . . . . . . . . . . . 52
4.4.3 Termwise Multiplication . . . . . . . . . . . . . . . . 52
4.4.4 Termwise Division . . . . . . . . . . . . . . . . . . . 53
4.5 Illustrative Examples of the Power Series Method . . . . . . . 53
4.6 Regular Points of Linear 2ndOrder Dierential Equations . . . 57
4.7 Method of Frobenius . . . . . . . . . . . . . . . . . . . . 58
4.8 Important 2ndOrder Equations . . . . . . . . . . . . . . . 62
4.9 Legendres Equation . . . . . . . . . . . . . . . . . . . . 63
4.10 Associated Legendres Functions . . . . . . . . . . . . . . 68
4.11 Bessels Equation . . . . . . . . . . . . . . . . . . . . . 68
4.12 Gamma Function . . . . . . . . . . . . . . . . . . . . . 72
4.13 Bessel Functions of the Second Kind . . . . . . . . . . . . 73
4.14 Modied Bessel Functions . . . . . . . . . . . . . . . . . 76
4.15 Useful Formulas . . . . . . . . . . . . . . . . . . . . . 77
4.15.1 Recurrence Relationships Involving J
(x) . . . . . . . . 77
4.15.2 Recurrence Relationships Involving I
(x) . . . . . . . . . 78
4.15.3 Recurrence Relationships Involving K
(x) . . . . . . . . 79
4.15.4 Integral Representations of J
n
(x), I
n
(x) and K
n
(x) . . . . 80
4.15.5 Indenite Integrals of Bessel Functions . . . . . . . . . . 81
4.15.6 Denite Integrals Involving Bessel Functions . . . . . . . 82
4.16 Summary of Bessels Equations . . . . . . . . . . . . . . . 83
4.17 Orthogonal Sets of Functions . . . . . . . . . . . . . . . . 88
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS vi
4.18 SturmLiuville Problem . . . . . . . . . . . . . . . . . . 90
4.19 Important Orthogonal Functions and Polynomials . . . . . . 93
4.19.1 Bessel Functions . . . . . . . . . . . . . . . . . . . 93
4.19.2 Legendre Polynomials . . . . . . . . . . . . . . . . . 94
4.20 Exercises . . . . . . . . . . . . . . . . . . . . . . . . 95
Chapter 5
Laplace Transform . . . . . . . . . . . . . . . . . . 99
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . 99
5.2 Characteristics of Problems Suited for Laplace Transform . . . . 99
5.3 Denition of the Laplace Transform . . . . . . . . . . . . . 99
5.4 References to Tables of Laplace Transforms . . . . . . . . . . 102
5.5 Existence of Laplace Transforms . . . . . . . . . . . . . . . 103
5.5.1 Piecewise Continuity . . . . . . . . . . . . . . . . . . 103
5.5.2 Functions of Exponential Order . . . . . . . . . . . . . 103
5.6 Some Important Properties of Laplace Transforms . . . . . . . 104
5.6.1 Linearity Property . . . . . . . . . . . . . . . . . . . 104
5.6.2 Laplace Transform of Derivatives . . . . . . . . . . . . . 104
5.6.3 Laplace Transform of Integrals . . . . . . . . . . . . . . 105
5.6.4 First Translation or Shifting Property (Shifting on saxis) . 105
5.6.5 Second Translation or Shifting Property (Shifting on taxis) 106
5.6.6 Change of Scale Property . . . . . . . . . . . . . . . . 107
5.6.7 Division by t . . . . . . . . . . . . . . . . . . . . . 107
5.6.8 Multiplication by t
n
. . . . . . . . . . . . . . . . . . 108
5.6.9 Periodic Functions . . . . . . . . . . . . . . . . . . . 108
5.6.10 Behavior of F(s) as s . . . . . . . . . . . . . . . 109
5.7 Methods of Finding Laplace Transforms . . . . . . . . . . . 110
5.8 The Inverse Laplace Transform . . . . . . . . . . . . . . . 110
5.9 Some Important Properties of the Inverse Laplace Transform . . 111
5.9.1 Linearity . . . . . . . . . . . . . . . . . . . . . . . 111
5.9.2 First Translation or Shifting Property . . . . . . . . . . . 111
5.9.3 Second Translation or Shifting Property . . . . . . . . . . 112
5.9.4 Change of Scale Property . . . . . . . . . . . . . . . . 112
5.9.5 Inverse Laplace Transform of Derivatives . . . . . . . . . 112
5.9.6 Inverse Laplace Transform of Integrals . . . . . . . . . . 113
5.9.7 Multiplication by s
n
. . . . . . . . . . . . . . . . . . 113
5.9.8 Division by s . . . . . . . . . . . . . . . . . . . . . 114
5.9.9 Convolution Theorem . . . . . . . . . . . . . . . . . . 114
5.10 Some Methods of Finding Inverse Laplace Transforms . . . . . 115
5.10.1 Partial Fractions Method . . . . . . . . . . . . . . . . 116
5.10.2 Series Method . . . . . . . . . . . . . . . . . . . . 118
5.10.3 The Complex Inversion Formula . . . . . . . . . . . . 119
5.11 Some Special Functions . . . . . . . . . . . . . . . . . . 119
5.11.1 The Error Function . . . . . . . . . . . . . . . . . . 119
5.11.2 The Dirac Delta Function . . . . . . . . . . . . . . . 122
5.12 Exercises . . . . . . . . . . . . . . . . . . . . . . . . 123
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS vii
Chapter 6
Application of Laplace Transforms in the Solution of
Ordinary Dierential Equations . . . . . . . . . . 125
6.1 Methodology . . . . . . . . . . . . . . . . . . . . . . . 125
6.2 Ordinary Dierential Equations with Constant Coecients . . . 125
6.3 Ordinary Dierential Equations with Variable Coecients . . . 128
6.4 Simultaneous Solution of Ordinary Dierential Equations . . . . 130
6.5 Application to Beams . . . . . . . . . . . . . . . . . . . 133
6.6 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . 136
Chapter 7
Linear Algebra . . . . . . . . . . . . . . . . . . . 139
7.1 Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . 139
7.1.1 Laws of Vector Algebra . . . . . . . . . . . . . . . . . 139
7.1.2 Unit Vectors . . . . . . . . . . . . . . . . . . . . . . 139
7.1.3 Components of a Vector . . . . . . . . . . . . . . . . . 139
7.1.4 Dot or Scalar Product . . . . . . . . . . . . . . . . . 140
7.1.5 General Vector Space . . . . . . . . . . . . . . . . . . 140
7.1.6 Gradient and Divergence . . . . . . . . . . . . . . . . 141
7.2 Matrices . . . . . . . . . . . . . . . . . . . . . . . . . 141
7.2.1 Denition of a Matrix . . . . . . . . . . . . . . . . . 141
7.2.2 Some Special Denitions and Operations Involving Matrices 142
7.2.3 Gaussian Elimination (Triangular Factorization) . . . . . . 146
7.2.4 Rank of a Matrix . . . . . . . . . . . . . . . . . . . 147
7.2.5 Inverse of a Matrix . . . . . . . . . . . . . . . . . . . 148
7.2.6 GaussJordan Elimination . . . . . . . . . . . . . . . . 149
7.3 Determinants . . . . . . . . . . . . . . . . . . . . . . . 150
7.3.1 Theorems on Determinants . . . . . . . . . . . . . . . 151
7.3.2 Cramers Rule (Revisit) . . . . . . . . . . . . . . . . . 151
7.3.3 Eigenvalues and Eigenvectors . . . . . . . . . . . . . . 152
7.3.4 Application . . . . . . . . . . . . . . . . . . . . . . 152
7.3.5 Multiple Eigenvalues . . . . . . . . . . . . . . . . . . 156
7.3.6 Complex Eigenvalues . . . . . . . . . . . . . . . . . . 157
7.3.7 Reduction of Matrix to Diagonal Form . . . . . . . . . . 157
7.3.8 Properties of Eigenvalues and Eigenvectors . . . . . . . . 158
7.4 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . 159
Chapter 8
Fourier Series, Fourier Integrals, Fourier Transforms . . . 161
8.1 Periodic Functions . . . . . . . . . . . . . . . . . . . . . 161
8.2 Properties of Periodic Functions . . . . . . . . . . . . . . . 162
8.3 Fourier Series . . . . . . . . . . . . . . . . . . . . . . . 163
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS viii
8.3.1 Orthogonality Relations for Sine and Cosine Functions . . . 163
8.3.2 Evaluation of Fourier Coecients . . . . . . . . . . . . 164
8.3.3 Functions of any Period p = 2L . . . . . . . . . . . . . 167
8.3.4 Even and Odd Functions . . . . . . . . . . . . . . . . 168
8.3.5 Fourier Series of Even and Odd Functions of Period 2L . . . 168
8.3.6 Hidden Symmetry . . . . . . . . . . . . . . . . . . . 169
8.3.7 HalfRange Expansions . . . . . . . . . . . . . . . . . 170
8.4 Fourier Integrals . . . . . . . . . . . . . . . . . . . . . . 172
8.4.1 Fourier Cosine and Sine Integrals . . . . . . . . . . . . . 174
8.4.2 Fourier Transformations . . . . . . . . . . . . . . . . . 176
8.4.3 Fourier Transformation (Complex Form) . . . . . . . . . 179
8.5 Properties of Fourier Transformations . . . . . . . . . . . . 181
8.5.1 Linearity . . . . . . . . . . . . . . . . . . . . . . . 181
8.5.2 Time Shifting . . . . . . . . . . . . . . . . . . . . . 181
8.5.3 Frequency Shifting . . . . . . . . . . . . . . . . . . . 181
8.5.4 Scaling . . . . . . . . . . . . . . . . . . . . . . . . 181
8.5.5 TimeReversal . . . . . . . . . . . . . . . . . . . . . 182
8.5.6 Modulation Theorem . . . . . . . . . . . . . . . . . . 182
8.5.7 Additional Properties when f(t) is Real . . . . . . . . . . 183
8.5.8 Dierentiation and Integration Theorems . . . . . . . . . 185
8.5.9 Multidimensional Fourier Transforms . . . . . . . . . . . 186
8.5.10 Convolution . . . . . . . . . . . . . . . . . . . . . 186
8.5.11 Frequency Convolution . . . . . . . . . . . . . . . . . 187
8.6 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . 187
Chapter 9
Partial Dierential Equations . . . . . . . . . . . . . 189
9.1 Classication of 2ndOrder Partial Dierential Equations . . . . 189
9.2 Method of Separating Variables (Product Method) . . . . . . . 190
9.2.1 Vibration of a String . . . . . . . . . . . . . . . . . . 191
9.2.2 OneDimensional Acoustic Vibrations . . . . . . . . . . 197
9.2.3 Nuclear Reactor Criticality . . . . . . . . . . . . . . . 200
9.3 Laplace Transformation Applied to the Solution of
Partial Dierential Equations . . . . . . . . . . . . . . . . . 203
9.4 Fourier Transformations Applied to the Solution of
Partial Dierential Equations . . . . . . . . . . . . . . . . . 209
9.5 SelfSimilar Solutions . . . . . . . . . . . . . . . . . . . 212
9.5.1 Characteristic Scales and ScaleSimilar Problems . . . . . . 212
9.5.2 SelfSimilarity . . . . . . . . . . . . . . . . . . . . . 213
9.6 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . 219
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS ix
Chapter 10
Solutions to Exercises . . . . . . . . . . . . . . . . 221
10.1 Dierential Equations of the First Order (Chapter 2) . . . . . 221
10.2 Fundamental and Important Properties of Linear Ordinary
Dierential Equations (Chapter 3) . . . . . . . . . . . . . . 231
10.3 Series Solutions of Dierential Equations (Chapter 4) . . . . . 238
10.4 Laplace Transform (Chapter 5) . . . . . . . . . . . . . . . 252
10.5 Application of Laplace Transform in the Solution of
Ordinary Dierential Equations (Chapter 6) . . . . . . . . . . 259
10.6 Linear Algebra (Chapter 7) . . . . . . . . . . . . . . . . 266
10.7 Fourier Series, Integrals and Transforms (Chapter 8) . . . . . 274
10.8 Partial Dierential Equations (Chapter 9) . . . . . . . . . . 282
References . . . . . . . . . . . . . . . . . . . . . 289
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS x
Reality
ODE
PDE
Mathematical Models & Solutions
Power Series
Laplace Transforms
Numeri cal Methods
Fourier Series
Separation of Variables
Numerical Methods
Prediction of Reality via Mathematical
Model Solutions
Chapter 1
Introduction
1.1 Creation and Solution of Engineering Models
The important steps associated with the creation and solution of an engi-
neering mathematical model are:
(1) Begin with a physical problem.
(2) Dene the physics, chemistry and/or biology of the problem in mathe-
matical terms.
(3) Collect mathematical relations into a wellposed problem.
(4) Solve the mathematical problem.
(5) Use the solution to predict, etc.
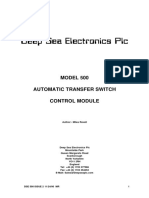
The mathematical development of an engineering model is also schemati-
cally illustrated in Figure 1.1.
Figure 1.1: Pattern for the creation and solution of a physical model. The
abbreviations ODE and PDE represent ordinary and partial
dierential equations, respectively.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 1
Bedr ock
Wate r Table
Flow
TCE
It should be noted that an integral transformation produces from given
functions new functions which depend on a dierent variable and appear
in the form of an integral to be evaluated. These transformations are of
interest mainly as tools in solving ordinary dierential equations, partial
dierential equations and integral equations, and they often also help in
handling and applying special functions. The Laplace transformation is of
this kind and is by far the most important integral transformation in engi-
neering. From the viewpoint of applications the next in order of importance
are perhaps the Fourier transformations, although these are somewhat more
dicult to handle than the Laplace transformation.
Example
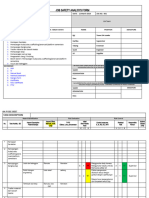
Consider the case of modeling the transient contaminant transport from
nonaqueous phase liquid pool denser than water in a twodimensional ho-
mogeneous porous medium under steadystate uniform ow conditions. A
nonaqueous phase liquid released into the subsurface environment inl-
trates through the vadose zone leaving behind blobs or ganglia which are
no longer connected to the main body of the organic liquid. Upon reaching
the water table, nonaqueous phase liquids heavier than water continue to
migrate downward until they encounter an impermeable layer where a at
pool starts to form (see Figure 1.2). As groundwater ows past a non
aqueous phase liquid pool, a plume of dissolved hydrocarbons is created.
For mathematical simplicity the physical problem illustrated in Figure 1.2
is represented by a conceptual model presented in Figure 1.3.
Figure 1.2: Schematic illustration of the migration in the subsurface of
slightly soluble in water organic liquids which are heavier than
water, such as trichloroethylene (TCE).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 2
x
z
x
l
x
l
xo
l
xo
+l
x
C(t,x ,z)
C
s
Figure 1.3: Prole view of the conceptual model showing the unidirec-
tional groundwater velocity U
x
, the location of a denser than
water nonaqueous phase liquid pool with aqueous saturation
concentration C
s
and length
x
, and the dissolved concentra-
tion in the plume C(t, x, z).
Assuming that the organic solvent is sorbing under local equilibrium con-
ditions, the governing partial dierential equation is given by
R
C
t
= D
x
2
C
x
2
+ D
z
2
C
z
2
U
x
C
x
,
where C(t, x, z) is the liquid phase solute concentration; U
x
is the average
interstitial uid velocity; x, z are the spatial coordinates in the longitudinal
and vertical directions, respectively; R is the dimensionless retardation fac-
tor for linear, reversible, instantaneous sorption; D
x
and D
z
are the longi-
tudinal and vertical hydrodynamic dispersion coecients, respectively; and
t is time. Assuming that the thickness of the pool is insignicant relative to
the thickness of the aquifer, the nonaqueous phase liquid dissolution at the
poolwater interface is described by the following mass transfer relationship
D
e
C(t, x, 0)
z
= k(t, x) [C
s
C(t, x, )] ,
where D
e
= D/
is the eective molecular diusion coecient, D is the
molecular diusion coecient,
is the tortuosity coecient (
1),
k(t, x) is the local mass transfer coecient dependent on time and location
on the poolwater interface, C
s
is the aqueous concentration at the inter-
face and for a pure organic liquid equals the liquids aqueous saturation
(solubility) concentration, and C(t, x, ) 0 corresponds to the contami-
nant concentration outside the boundary layer, the appropriate initial and
boundary conditions for this system are:
C(0, x, z) = 0,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 3
y
y=0
C(t, , z) = 0,
D
e
C(t, x, 0)
z
=
0 0 x
o
,
C
s
k(t, x)
o
< x <
o
+ ,
0 x
o
+ ,
C(t, x, ) = 0.
The solution to the governing partial dierential equation subject to the
prescribed initial and boundary conditions can be obtined by Laplace trans-
form techniques.
1.2 Denitions
1.2.1 Dierential Equations
A dierential equation contains derivatives of an unknown function, which
we call y(x) and which we want to determine from the equation.
1.2.2 Ordinary Dierential Equations
An ordinary dierential equation has only one independent variable and
involves one or several derivatives of y(x). The equation may also involve
y(x) itself, given functions of x, and constants.
Example
The acceleration of a falling stone, as illustrated in Figure 1.4, is equal to
the acceleration of gravity, g, and is described by the following secondorder
ordinary dierential equation
d
2
y
dt
2
= g = constant,
where the dependent variable is the vertical distance, y, and the indepen-
dent variable is time, t.
Figure 1.4: A falling stone.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 4
1.2.3 Partial Dierential Equations
An equation that involves partial derivatives of y of two or more indepen-
dent variables is called partial dierential equation.
Examples
(a) Onedimensional wave equation (hyperbolic)
2
u
t
2
= c
2
2
u
x
2
,
where u(x, t) is the deection of a string, x is the spatial coordinate and t
is time.
(b) Onedimensional heat equation (parabolic)
u
t
= c
2
2
u
x
2
,
where u(x, t) is the temperature and c
2
= / ( is the thermal conduc-
tivity, is the specic heat and is the density).
(c) Twodimensional Laplace equation (elliptic)
2
u
x
2
+
2
u
y
2
= 0.
1.2.4 Order
The order of the highest derivative of the dierential equation is called the
order of the equation.
Examples
y
t
= ky 1st order ODE
2
u
x
2
+
2
u
y
2
= F(x, y) 2nd order PDE (Poisson equation)
d
2
y
dx
2
+ 2b
dy
dx
3
+ y = 0 2nd order ODE
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 5
1.2.5 Linearity and Nonlinearity
A linear equation is one in which the dependent variable and its derivatives
appear only to the rst power, and never in products. Thus, the general
linear equation of order n may be written as follows
b
0
(x)
d
n
y
dx
n
+ b
1
(x)
d
n1
y
dx
n1
+ + b
n1
(x)
dy
dx
+ b
n
(x)y = R(x).
If the righthand side, R(x), is zero for all x, the equation is said to be
homogeneous; otherwise, it is said to be nonhomogeneous:
R(x) = 0 homogeneous,
R(x) = 0 nonhomogeneous.
Examples
d
2
y
dx
2
+
dy
dx
6y = 0 2nd order linear,
dy
dx
+ k
y = 0 1st order nonlinear.
1.2.6 Homogeneous Functions
The function f(x, y) is said to be homogeneous of degree k in x and y if
and only if
f(x, y) =
k
f(x, y),
where and k are constants.
Examples
4x
2
3xy + y
2
homogeneous, k = 2,
e
x
nonhomogeneous,
exp
x
y
homogeneous, k = 0,
y
2
tan
x
y
homogeneous, k = 2,
x
3
xy + y
3
nonhomogeneous.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 6
1.2.7 Boundary and Initial Conditions
In addition to the governing dierential equation one must have an appro-
priate set of boundary and/or initial conditions specied by the physical
system examined.
1.2.8 WellPosedness
If a portion of the needed boundary or initial condition information is miss-
ing, the problem is said to be incompletely posed. If too much information,
or the wrong type of information, is prescribed, the problem is said to be
illposed. It is important to learn to identify when a problem is not well
posed. A good way to do this is to use physical intuition. There are certain
mathematical rules, for simple types of problems, but in dealing with the
problems that typically arise in engineering or applied science one has no
choice but to rely on experience and intuition.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 7
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 8
Chapter 2
Dierential Equations of the First Order
2.1 Separable Dierential Equations
Many rstorder dierential equations can be reduced to the form
g(y)
dy
dx
= f(x)
= g(y) dy = f(x) dx,
that is an equation with separable variables, by integrating on both sides
we obtain
_
g(y) dy =
_
f(x) dx + c.
Example 1
Solve the following rstorder ordinary dierential equation
dy
dt
= ky.
dy
y
= k dt, y = 0
dy
y
= d(lny)
=
_
d(lny) = k
_
dt + C
=ln|y| = kt + C
=y = exp[kt + C]
=y = e
C
e
kt
=y = C
1
e
kt
At t = 0 : y = C
1
= initial value
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 9
Example 2
Solve the following rstorder ordinary dierential equation
dy
dx
=
2y
x
, x > 0, y > 0.
dy
y
=
2
x
dx
=ln|y| = 2 ln|x| + c
=y = exp[2 lnx + c]
=y = e
c
e
2 ln x
=y = C
1
e
ln x
2
=y = C
1
x
2
2.2 Reduction to Separable Form (Using Change of Variables)
For equations of the form
dy
dx
= g
_
y
x
_
(1)
that is homogeneous functions of degree 0, use
y = ux
(or x = uy; it is sometimes easier to substitute for the variable whose
dierential has the simpler coecient)
=dy = u dx + x du (2)
(1) & (2) =u + x
du
dx
= g
_
y
x
_
= g(u)
=
du
g(u) u
=
dx
x
the variables are separable.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 10
Example
Solve the following rstorder ordinary dierential equation
(x
2
xy + y
2
) dx xy dy = 0.
=
dx
dy
=
xy
x
2
xy + y
2
Because the coecients are both homogeneous and of the same degree
(k=2) let
y = ux, dy = u dx + x du
(x
2
x
2
u + x
2
u
2
) dx x
2
u(u dx + x du) = 0 divide by x
2
=(1 u + u
2
) dx u(u dx + x du) = 0
=(1 u) dx ux du = 0 x > 0, u = 1
=
dx
x
+
u du
u 1
= 0
=
dx
x
+
_
1 +
1
u 1
_
du = 0
=ln|x| + u + ln|u 1| = constant = ln|C|
=exp[ln|x| + u + ln|u 1|] = C
=x(u 1)e
u
= C.
In terms of original variables
x
_
y
x
1
_
exp
_
y
x
_
= C
= (y x) exp
_
y
x
_
= C (Family of solutions)
2.3 Exact Dierential Equations
A rstorder dierential equation of the form
M(x, y)dx + N(x, y)dy = 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 11
is exact if a function F exists such that
dF = M dx + N dy,
dF = 0 = F = C.
But, from calculus the total or exact dierential for F(x, y) is given by
dF =
F
x
dx +
F
y
dy.
So, M and N must be
M =
F
x
, N =
F
y
=
M
y
=
2
F
yx
,
N
x
=
2
F
xy
=
M
y
=
N
x
Restrictions: M, N,
M
y
,
N
x
are continuous functions of x and y.
Example 1
Solve the following rstorder ordinary dierential equation
3x(xy 2)
. .
M
dx + (x
3
+ 2y)
. .
N
dy = 0.
M
y
= 3x
2
,
N
x
= 3x
2
Therefore, the governing equation is exact and its solution is F = C.
F
x
= M = 3x
2
y 6x, (1)
F
y
= N = x
3
+ 2y. (2)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 12
Integrating both sides of (1) with respect to x holding y constant, yields
F = x
3
y 3x
2
+ T(y), (3)
where the usual arbitrary constant resulting from the indenite integration
is now necessarily a function T(y). To determine T(y), we use the fact that
the function F of equation (3) must also satisfy equation (2). Hence,
x
3
+
dT(y)
dy
= x
3
+ 2y
=
dT(y)
dy
= 2y.
It should be noted that no arbitrary constant is needed because one is being
introduced on the righthand side of the solution F = C.
_
dT(y) =
_
2y dy
= T(y) = y
2
. (4)
From (3) and (4) = F = x
3
y 3x
2
+ y
2
= x
3
y 3x
2
+ y
2
= C (A set of solutions)
Example 2
Solve the following rstorder ordinary dierential equation
(2x
3
xy
2
2y + 3)
. .
M
dx (x
2
y + 2x)
. .
N
dy = 0.
Because
M
y
= 2xy 2 =
N
x
,
a set of solutions is F = C, where
F
x
= 2x
3
xy
2
2y + 3 = M, (1)
F
y
= x
2
y 2x = N. (2)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 13
Integrating (2) yields
F =
x
2
y
2
2
2xy + Q(x). (3)
Substituting (3) into (1) yields
xy
2
2y +
dQ(x)
dx
= 2x
3
xy
2
2y + 3
=
dQ(x)
dx
= 2x
3
+ 3
= Q(x) =
x
4
2
+ 3x. (4)
Substituting (4) into (3) leads to
F =
x
2
y
2
2
2xy +
x
4
2
+ 3x = C
= x
4
x
2
y
2
4xy + 6x = 2C = C
2.4 Integrating Factors (I.F.)
An inexact ordinary dierential equation can be made exact by multiplying
by some nonzero function u(x) or u(y), known as the integrating factor.
Consider the inexact equation
P(x, y)dx + Q(x, y)dy = 0, ()
assuming that there exists a positive integrating factor u(x). Then, the
following equation is exact
u(x)P(x, y)
. .
M
dx + u(x)Q(x, y)
. .
N
dy = 0.
=
M
y
=
N
x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 14
=
y
[u(x)P(x, y)] =
x
[u(x)Q(x, y)]
= u(x)
P(x, y)
y
=
u(x)
x
Q(x, y) + u(x)
Q(x, y)
x
,
dividing by u(x)Q(x, y) yields
=
1
u(x)
du(x)
dx
=
1
Q(x, y)
_
P(x, y)
y
Q(x, y)
x
_
.
Note that the lefthand side of the preceding expression is only a function of
x. If the righthand side is also a function of x, then () has an integrating
factor u(x), which is obtained by solving the preceding equation:
= u(x) = exp
__
1
Q(x, y)
_
P(x, y)
y
Q(x, y)
x
_
dx
_
.
Similarly, if
1
P(x, y)
_
P(x, y)
y
Q(x, y)
x
_
= f(y),
= u(y) = exp
_
_
1
P(x, y)
_
P(x, y)
y
Q(x, y)
x
_
dy
_
is an integrating factor. Note the negative exponential argument.
Example 1
The following ordinary dierential equation
2y(x
2
y + x)
. .
P
dx + (x
2
2y)
. .
Q
dy = 0,
may be reduced to exact by an integrating factor.
P
y
Q
x
= (2x
2
4y + 2x) 2x = 2x
2
4y,
=
1
Q
_
P
y
Q
x
_
=
2x
2
4y
x
2
2y
= 2 f(x)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 15
An integrating factor is:
u(x) = exp
__
1
Q
_
P
y
Q
x
_
dx
_
= exp
__
2 dx
_
= e
2x
Example 2
Obtain an integrating factor for the following ordinary dierential equation
y
2
..
P
dx + (3xy + y
2
1)
. .
Q
dy = 0.
P
y
Q
x
= 2y 3y = y,
1
P
_
P
y
Q
x
_
=
y
y
2
=
1
y
.
An integrating factor is:
u(y) = exp
_
_
1
P
_
P
y
Q
x
_
dy
_
= exp
__
dy
y
_
= exp{lny} = y
2.5 The General Solution of a Linear FirstOrder Ordinary
Dierential Equation
The general form of a rstorder ordinary dierential equation is given by
dy
dx
+ P(x)y = R(x).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 16
For the moment, suppose that there exists for the preceding equation a
positive integrating factor, u(x) > 0, a function of x alone. Then, the
following equation must be exact
u(x)
_
dy
dx
+ P(x)y
_
= u(x)R(x).
=[u(x)P(x)y u(x)R(x)]
. .
M
dx + u(x)
..
N
dy = 0 (1)
M
y
=
N
x
=u(x)P(x) =
du(x)
dx
=P(x) dx =
du(x)
u(x)
=lnu(x) =
_
P(x) dx
=u(x) = exp
__
P(x) dx
_
. (2)
Substituting (2) into (1) yields
exp[ ] dy + y exp[ ]P(x) dx = exp[ ]R(x) dx
=
d
dx
{y exp[ ]} = exp[ ]R(x)
=y exp[ ] =
_
exp[ ]R(x) dx + c
=y = e
_
P(x) dx
__
e
_
P(x) dx
R(x) dx + c
_
Example
Find the solution to the following ordinary dierential equation
(x
4
+ 2y) dx x dy = 0.
= x
4
+ 2y x
dy
dx
= 0, divide by x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 17
= x
3
2y
x
+
dy
dx
= 0
=
dy
dx
+
_
2
x
_
. .
p(x)
y = x
3
..
R(x)
.
The preceding equation is a linear nonhomogeneous rstorder ordinary
dierential equation with a solution directly given as
y = e
_
2
x
dx
__
e
_
2
x
dx
x
3
dx + c
_
=e
2 ln x
__
e
2 ln x
x
3
dx + c
_
=y = x
2
__
x dx + c
_
=y = x
2
_
x
2
2
+ c
_
2.6 Bernoullis Equation
An equation that can be transformed into a type that we know how to solve
is the following
dy
dx
+ P(x)y = R(x)y
n
.
If n = 1, the variables are separable, so we concentrate on the case n = 1.
y
n
dy + P(x)y
n+1
dx = R(x) dx,
let z = y
n+1
, dz = (1 n)y
n
dy
=
dz
1 n
+ P(x)z dx = R(x) dx
=
dz
dx
+ (1 n)P(x)z = (1 n)R(x)
This transformed equation is a linear equation in the standard form that
can easily be solved by standard techniques.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 18
Example
Find the solution to the following ordinary dierential equation
xy dx +
_
x
2
3y
_
dy = 0.
=xy
dx
dy
+ x
2
3y = 0
=
dx
dy
+
_
1
y
_
x = 3x
1
Bernoulli
s eq. in x
P(y) =
1
y
, R(y) = 3, n = 1,
let z = x
1n
= x
1(1)
= x
2
,
dz = 2x dx dx =
dz
2x
,
=
dz
dy
+ 2
_
1
y
_
z = (2)(3)
=
dz
dy
+
_
2
y
_
z = 6 1st order linear
=z = e
_
2
y
dy
__
e
_
2
y
dy
6 dy + c
_
=z = e
2 ln y
__
6e
2 ln y
dy + c
_
=z =
1
y
2
_
2y
3
+ c
_
=zy
2
= 2y
3
+ c.
Substituting back the original variables leads to
= x
2
y
2
= 2y
3
+ c
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 19
2.7 Exercises
(1) Obtain the general solution of (Separable O.D.E.)
(a) xy
3
dx + e
x
2
dy = 0
(b)
dy
dx
= xy
2
(c) x
2
y
dy
dx
= e
y
(2) Obtain a family of solutions for the following equations (Reduction to
separable form)
(a) xy dx
_
x
2
+ 3y
2
_
dy = 0 Ans. x
2
= 6y
2
ln
y
C
(b) x
2
dy
dx
= 4x
2
+ 7xy + 2y
2
Ans. x
2
(y + 2x) = C(y + x)
(c) (x y)(4x +y)dx +x(5x y)dy = 0 Ans. x(x +y)
2
= C(y 2x)
(3) Test each of the following equations for exactness and solve the equation
(a) (x + 2y)dx + (2x + y)dy = 0
(b) v
_
2uv
2
3
_
du +
_
3u
2
v
2
3u + 4v
_
dv = 0
(c)
_
cos 2y 3x
2
y
2
_
dx +
_
cos 2y 2xsin2y 2x
3
y
_
dy = 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 20
(4) Solve each of the following equations (I.F.):
(a)
_
x
2
+ y
2
+ 1
_
dx + x(x 2y)dy = 0
(b) y(2x y + 1)dx + x(3x 4y + 3)dy = 0
(c) y(4x + y)dx 2
_
x
2
y
_
dy = 0
(5) Find the general solution of the following equations:
(a) y
2
dx +
_
xy + y
2
1
_
dy = 0; when x = 1, y = 1
(b)
dy
dx
= y tanx + cos x
(6) Solve the following equations (Bernoullis):
(a) 2x
3
dy
dx
= y
_
y
2
+ 3x
2
_
(b)
_
2y
3
x
3
_
dx + 3xy
2
dy = 0; when x = 1, y = 1
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 21
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 22
Chapter 3
Fundamental and Important Properties of Linear
Ordinary Dierential Equations
3.1 Linear Dierential Equation of Order n
The general linear dierential equation of order n has the form:
b
0
(x)
d
n
y
dx
n
+ b
1
(x)
d
n1
y
dx
n1
+ + b
n1
(x)
dy
dx
+ b
n
(x)y = R(x). (1)
If R(x) = 0, the preceding equation is said to be linear and homogeneous.
If y
1
and y
2
are solutions of the general homogeneous equation and if
c
1
and c
2
are constants, then
y = c
1
y
1
+ c
2
y
2
is a solution of the general homogeneous equation.
The statement that y
1
and y
2
are solutions of (1) means that
b
0
y
n
1
+ b
1
y
n1
1
+ + b
n1
y
1
+ b
n
y
1
= 0 (2)
b
0
y
n
2
+ b
1
y
n1
2
+ + b
n1
y
2
+ b
n
y
2
= 0 (3)
multiply each member of (2) by c
1
and each member of (3) by c
2
, and add
the results to yield
b
0
_
c
1
y
(n)
1
+ c
2
y
(n)
2
_
+b
1
_
c
1
y
(n1)
1
+ c
2
y
(n1)
2
_
+
+b
n1
(c
1
y
1
+ c
2
y
2
) + b
n
(c
1
y
1
+ c
2
y
2
) = 0. (4)
Because
c
1
y
1
+ c
2
y
2
= (c
1
y
1
+ c
2
y
2
)
,
c
1
y
(n)
1
+ c
2
y
(n)
2
= (c
1
y
1
+ c
2
y
2
)
(n)
,
equation (4) is neither more nor less than the statement that c
1
y
1
+c
2
y
2
is
a solution of equation (1).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 23
f(x)
x
Special Case
If c
2
= 0, for a homogeneous linear equation any constant times a solution
is also a solution. Similarly: if y
i
(i = 1, 2, , k) are solutions of equation
(1), and if c
i
(i = 1, 2, , k) are constants, then any linear combination of
the functions y
1
, y
2
, , y
k
, for example
y = c
1
y
1
+ c
2
y
2
+ + c
k
y
k
,
is a solution of equation (1).
3.2 Superposition Principle
Theorem: Any linear combination of solutions of a linear homogeneous
dierential equation is also a solution.
3.3 Existence and Uniqueness Theorem
If b
0
(x), b
1
(x), , b
n
(x) and R(x) are continuous in the interval a < x <
b, then there exists one and only one solution to (1) which satises the
following initial conditions:
y(x
0
) = y
0
y
(x
0
) = y
0
y
(n1)
(x
0
) = y
(n1)
0
.
A function f(x) is said to be continuous at if lim
x
f(x) = f(). A discon-
tinuous function is shown in Figure 3.1.
Figure 3.1: A function with a discontinuity at x = .
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 24
3.4 Linear Independence
Given the functions f
1
, , f
n
, and
c
1
f
1
(x) + c
2
f
2
(x) + + c
n
f
n
(x) = 0, a x b
then, f
1
, , f
n
are linearly independent when c
1
= c
2
= = c
n
= 0.
If the functions of a set are linearly dependent, at least one of them
is a linear combination of the others; if they are linearly independent, then
none of them is a linear combination of the others.
Example 1
c
1
..
5
f
1
..
_
2e
3x
_
+ c
2
..
2
f
2
..
_
5e
3x
_
+ c
3
..
0
f
3
..
_
e
4x
_
= 0
f
1
, f
2
and f
3
are linearly dependent since c
1
= c
2
= c
3
= 0.
Example 2
The functions f
1
= e
x
and f
2
= xe
x
are linearly independent because
c
1
e
x
+ c
2
xe
x
= 0
only if c
1
= c
2
= 0.
3.5 The Wronskian
Theorem: If, on the interval a < x < b, b
0
, b
1
, , b
n
are continuous, and
y
1
, y
2
, , y
n
are solutions of the following equation
b
0
y
(n)
+ b
1
y
(n1)
+ + b
n1
y
+ b
n
y = 0,
then a necessary and sucient condition that y
1
, y
n
be linearly inde-
pendent is the nonvanishing of the Wronskian of y
1
, , y
n
on the interval
a < x < b. The Wronskian is dened as
W(y
1
, y
n
) =
y
1
(x) y
2
(x) y
n
(x)
y
1
(x) y
2
(x) y
n
(x)
.
.
.
.
.
.
.
.
.
.
.
.
y
(n1)
1
(x) y
(n1)
2
(x) y
(n1)
n
(x)
= 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 25
A nonzero Wronskian implies independence. However, it is important to
note that a Wronskian of zero does not imply dependence of vectors unless
those vectors are known all to be solutions of the same homogeneous linear
vector dierential equation.
Example
The functions y
1
(x) = 1, y
2
(x) = e
3x
, and y
3
(x) = e
3x
are solutions of
d
3
y
dx
3
9
dy
dx
= 0,
show that they are linearly independent
1 e
3x
e
3x
0 3e
3x
3e
3x
0 9e
3x
9e
3x
3e
3x
3e
3x
9e
3x
9e
3x
= 27 (27) = 54 = 0,
therefore the functions are independent
Recall:
D =
11
12
13
21
22
23
31
32
33
=
11
22
23
32
33
21
12
13
32
33
+
31
12
13
22
23
3.6 Dierential Operators
It is sometimes convenient to adopt the following notation
Dy =
dy
dx
,
D
2
y =
d
2
y
dx
2
,
D
k
y =
d
k
y
dx
k
.
The expression
A = b
0
D
n
+ b
1
D
n1
+ + b
n1
D + b
n
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 26
is called a dierential operator of order n, which, when applied to any
function y, yields
Ay = b
0
d
n
y
dx
n
+ b
1
d
n1
y
dx
n1
+ + b
n1
dy
dx
+ b
n
y.
Example
The equation
x
d
2
y
dx
2
+ 3
dy
dx
2xy = sinx
can be written as
_
xD
2
+ 3D 2x
_
y = sinx.
Two operators A and B are said to be equal if, and only if
Ay = By.
The product AB of two operators A and B is that operator which
ABy = A(By).
(Note that the product of two dierential operators always exists and is
a dierential operator).
The sum of two dierential operators is obtained by expressing each in
the form
b
0
D
n
+ b
1
D
n1
+ + b
n1
D + b
n
and adding corresponding coecients.
Example
A = 3D
2
D + x 2,
B = x
2
D
2
+ 4D + 7,
=A + B =
_
3 + x
2
_
D
2
+ 3D + x + 5
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 27
3.7 Fundamental Laws of Operation
Let A, B, and C be any dierential operators. Then, the dierential oper-
ators satisfy the following:
A + B = B + A Commutative law for addition
(A + B) + C = A + (B + C) Associative law for addition
(AB)C = A(BC) Associative law for multiplication
A(B + C) = AB + AC Distributive law of multiplication
with respect to addition
AB = BA Commutative law of multiplication (only
for operators with constant coecients)
D
m
D
n
= D
m+n
If m and n are positive integers
Example 1
A = D + 2,
B = 3D 1,
AB = (D + 2)(3D 1) = 3D
2
D + 6D 2 = 3D
2
+ 5D 2,
BA = (3D 1)(D + 2) = 3D
2
+ 5D 2,
=AB = BA
The commutative law of multiplication holds.
Example 2
G = xD + 2,
H = D 1,
GH = (xD + 2)(D 1)
= x(DD) xD + 2D 2
= xD
2
+ (2 x)D 2,
HG = (D 1)(xD + 2) = D(xD) + 2D xD 2
= D + xD
2
+ (2 x)D 2 = xD
2
+ (3 x)D 2,
_
D(xD) =
d
dx
_
x
d
dx
_
=
d
dx
+ x
d
2
dx
2
_
GH = HG
The commutative law of multiplication does not hold because the coe-
cients are variable.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 28
3.8 General Solution of a Nonhomogeneous Linear Equation
with Constant Coecients
In view of the superposition principle the general solution of a nonhomoge-
neous linear dierential equation can be written as:
y(x) = y
h
(x) + y
p
(x),
where
y
h
= c
1
y
1
(x) + + c
n
y
n
(x)
is the solution of the homogeneous equation, it is also known as comple-
mentary solution; and
y
p
(x)
is a solution of the nonhomogeneous equation, it contains no arbitrary
constants.
3.9 Homogeneous Solution
Assume a trial solution of the form
y = e
x
, = constant,
nd roots to satisfy the dierential equation
_
b
0
D
n
+ b
1
D
n1
+ + b
n
_
y = 0
=
_
b
0
n
+ b
1
n1
+ + b
n
_
e
x
= 0
=b
0
n
+ b
1
n1
+ + b
n
= 0.
The preceding expression is the characteristic equation or auxiliary equation
which has roots
1
,
2
, ,
n
.
3.9.1 Case 1: Roots All Real and Distinct
Then, e
1
x
, e
2
x
, e
n
x
are n linearly independent solutions and the re-
quired solution is
y = c
1
e
1
x
+ c
2
e
2
x
+ + c
n
e
n
x
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 29
Example 1
Solve the following equation
d
2
x
dt
2
4x = 0.
The corresponding characteristic equation is
2
4 = 0,
=( + 2)( 2) = 0,
roots :
1
= 2 and
2
= 2,
=x(t) = c
1
e
2t
+ c
2
e
2t
Example 2
Solve the following equation
d
2
y
dx
2
7
dy
dx
+ 12y = 0.
The corresponding characteristic equation is
2
7 + 12 = 0,
=( 3)( 4) = 0,
roots :
1
= 3 and
2
= 4,
=y(x) = c
1
e
3x
+ c
2
e
4x
3.9.2 Case 2: Roots are complex, i.e.,
1
= + i and
2
= i
y = c
1
e
(+i)x
+ c
2
e
(i)x
,
=y = c
1
e
x
e
ix
+ c
2
e
x
e
ix
,
_
e
ix
= cos x + i sinx
e
ix
= cos x i sinx
_
=y = c
1
e
x
(cos x + i sinx) + c
2
e
x
(cos x i sinx),
=y = (c
1
+ c
2
)e
x
cos x + i(c
1
c
2
)e
x
sinx,
let A = c
1
+ c
2
,
B = i(c
1
c
2
),
=y = Ae
x
cos x + Be
x
sinx.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 30
Example 1
Solve the following equation
d
2
y
dx
2
+ 4y = 0.
The corresponding characteristic equation is
2
+ 4 = 0,
roots :
1
= 2i and
2
= 2i,
=y(x) = Ae
0
cos 2x + Be
0
sin2x,
=y(x) = Acos 2x + B sin2x
Example 2
Solve the following equation
d
3
y
dx
3
3
d
2
y
dx
2
+ 9
dy
dx
+ 13y = 0.
The corresponding characteristic equation is
3
3
2
+ 9 + 13 = 0,
=( + 1)
_
2
4 + 13
_
= 0,
roots :
1
= 1,
2
= 2 + 3i, and
3
= 2 3i
=y(x) = c
1
e
x
+ c
2
e
2x
cos 3x + c
3
e
2x
sin3x
Illustration of Synthetic Division
2
4 2 = ( + 1)
_
2
2 2
_
_
2
2 2
+ 1 |
3
2
4 2
3
+
2
2
2
4
2
2
2
2 2
2 2
0
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 31
3.9.3 Case 3: Repeated Roots
If
1
is a root of multiplicity n (
1
=
2
= =
n
= b) we wish to nd n
linearly independent ys for which
(D b)
n
y = 0.
Then,
y
n
= x
n
e
bx
, n = 0, 1, 2, , (n 1)
are linearly independent, and the required solution is
y = c
1
e
bx
+ c
2
xe
bx
+ + c
n
x
n1
e
bx
Example 1
Solve the following homogeneous dierential equation
(D 1)
4
y = 0.
The corresponding characteristic equation is
( 1)
4
= 0,
roots :
1
=
2
=
3
=
4
= 1
=y(x) = c
1
e
x
+ c
2
xe
x
+ c
3
x
2
e
x
+ c
4
x
3
e
x
Example 2
Solve the following homogeneous dierential equation
(D
2
1)(D 1)
2
(D + 2)
2
y = 0.
The corresponding characteristic equation is
(
2
1)( 1)
2
( + 2)
2
= 0,
=( + 1)( 1)
3
( + 2)
2
= 0,
roots :
1
= 1,
2
=
3
=
4
= 1,
5
=
6
= 2
=y(x) = c
1
e
x
+ c
2
e
x
+ c
3
xe
x
+ c
4
x
2
e
x
+ c
5
e
2x
+ c
6
xe
2x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 32
Example 3
Solve the following homogeneous dierential equation
_
D
4
7D
3
+ 18D
2
20D + 8
_
y = 0.
The corresponding characteristic equation is
4
7
3
+ 18
2
20 + 8 = 0,
=( 1)( 2)
3
= 0,
roots :
1
= 1,
2
=
3
=
4
= 2
=y(x) = c
1
e
x
+
_
c
2
+ c
3
x + c
4
x
2
_
e
2x
Example 4
Solve the following homogeneous dierential equation
d
4
y
dx
4
+ 2
d
3
y
dx
3
+
d
2
y
dx
2
= 0.
The corresponding characteristic equation is
4
+ 2
3
+
2
= 0,
=
2
_
2
+ 2 + 1
_
= 0,
=
2
( + 1)
2
= 0,
roots :
1
=
2
= 0,
3
=
4
= 1
=y(x) = c
1
+ c
2
x + c
3
e
x
+ c
4
xe
x
3.10 Particular Solution
3.10.1 Method of Undetermined Coecients
This method is applicable only for ordinary dierential equations, for which
R(x) itself is a solution of a homogeneous linear equation with constant
coecients. In this method we assume a trial solution containing unknown
constants which are to be determined by substitution in the given equation.
The assumed solution depends on the special form of R(x) as shown in Table
3.1.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 33
Table 3.1: Trial Particular Solutions for Various R(x) Terms.
Term in R(x) Choice for y
p
ke
x
ce
x
kx
n
c
n
x
n
+ c
n1
x
n1
+ + c
1
x + c
0
k cos x Acos x + B sinx
k sinx Acos x + B sinx
ke
ax
cos x e
ax
(Acos x + B sinx)
ke
ax
sinx e
ax
(Acos x + B sinx)
This method holds in case no term in the assumed trial solution appears
in the homogeneous solution, y
h
. If any term of the assumed trial solution
does appear in y
h
, we must multiply this trial solution by the smallest
positive integer power of x which is large enough so that none of the terms
which are then present appear in y
h
.
Example 1
Solve the following nonhomogeneous ordinary dierential equation
d
2
y
dx
2
y = 8xe
x
.
The solution consists of the sum
y = y
h
+ y
p
.
Homogeneous Solution:
d
2
y
dx
2
y = 0,
characteristic equation :
2
1 = 0,
=( + 1)( 1) = 0,
roots :
1
= 1,
2
= 1,
=y
h
= c
1
e
x
+ c
2
e
x
.
Particular Solution: assume a trial solution
y
p
= x(Ae
x
+ Bxe
x
) = Axe
x
+ Bx
2
e
x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 34
Note that we multiply by x so that no terms in y
p
are identical to terms of
the homogeneous solution, y
h
.
dy
p
dx
= Ae
x
+ Axe
x
+ 2Bxe
x
+ Bx
2
e
x
= Ae
x
+ (A + 2B)xe
x
+ Bx
2
e
x
d
2
y
p
dx
2
= Ae
x
+ (A + 2B)e
x
+ (A + 2B)xe
x
+ 2Bxe
x
+ Bx
2
e
x
= (2A + 2B)e
x
+ (A + 4B)xe
x
+ Bx
2
e
x
=
d
2
y
p
dx
2
y
p
= 8xe
x
=(2A + 2B)e
x
+ (A + 4B)xe
x
+ Bx
2
e
x
. .
d
2
y
p
/dx
2
Axe
x
Bx
2
e
x
. .
y
p
= 8xe
x
=(2A + 2B)e
x
+ 4Bxe
x
= 8xe
x
Equating corresponding coecient on both sides yields
2A + 2B = 0, 4B = 8,
=A = 2, B = 2.
=y
p
= 2xe
x
+ 2x
2
e
x
.
=y(x) = c
1
e
x
+ c
2
e
x
2xe
x
+ 2x
2
e
x
Example 2
Solve the following nonhomogeneous ordinary dierential equation
d
2
y
dx
2
+ 2
dy
dx
+ 4y = 8x
2
+ 12e
x
.
The solution consists of the sum
y = y
h
+ y
p
.
Homogeneous Solution:
d
2
y
dx
2
+ 2
dy
dx
+ 4y = 0,
characteristic equation :
2
+ 2 + 4 = 0,
roots :
1
= 1 + i
3,
2
= 1 i
3
=y
h
= c
1
e
x
cos
3x + c
2
e
x
sin
3x.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 35
Particular Solution: assume a trial solution
y
p
= Ax
2
+ Bx + C
. .
8x
2
+De
x
. .
12e
x
.
Substituting y
p
into the governing dierential equation yields
(2A + De
x
) + 2
_
2Ax + B De
x
_
+ 4
_
Ax
2
+ Bx + C + De
x
_
= 8x
2
+ 12e
x
=4Ax
2
+ (4A + 4B)x + (2A + 2B + 4C) + 3De
x
= 8x
2
+ 12e
x
.
Equating corresponding coecient on both sides yields
4A = 8, 4A + 4B = 0, 2A + 2B + 4C = 0, 3D = 12,
=A = 2, B = 2, C = 0, D = 4.
=y
p
= 2x
2
2x + 4e
x
.
=y(x) =
_
c
1
cos
3x + c
2
sin
3x
_
e
x
+ 2x
2
2x + 4e
x
3.10.2 Lagranges Idea (Introduction to Variation of Parameters)
The following nonhomogeneous ordinary dierential equation
y
+ p(x)y
+ q(x)y = R(x), (1)
has a general solution y = y
h
+ y
p
, where
y
h
= c
1
y
1
+ c
2
y
2
,
y
p
= u(x)y
1
+ (x)y
2
. (2)
Dierentiating (2) yields
y
p
= u
y
1
+ uy
1
+
y
2
+ y
2
.
Imposing the arbitrary condition
u
y
1
+
y
2
= 0
leads to
y
p
= uy
1
+ y
2
(3)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 36
=y
p
= u
1
+ uy
1
+
2
+ y
2
. (4)
Substituting (2), (3), and (4) into (1) yields
u(y
1
+ py
1
+ qy
1
)
. .
0
+ (y
2
+ py
2
+ qy
2
)
. .
0
+u
1
+
2
= R.
Recall that y
1
and y
2
are solutions to the homogeneous equation (1),
=u
1
+
2
= R and u
y
1
+
y
2
= 0.
Solving the system of algebraic equations for u
and v
, integrating and
backsubstituting into (2) leads to the following expression
y
p
= y
1
_
y
2
R
W
dx + y
2
_
y
1
R
W
dx,
where W = y
1
y
2
y
1
y
2
is the Wronskian of y
1
and y
2
.
3.10.3 Method of Variation of Parameters
Let y
h
be the homogeneous solution of
b
0
d
n
y
dx
n
+ + b
n1
dy
dx
+ b
n
y = R(x), (1)
y
h
= c
1
y
1
(x) + c
2
y
2
(x) + + c
n
y
n
(x).
Replace the arbitrary constants c
1
, c
2
, , c
n
by functions u
1
(x), u
2
(x), ,
u
n
(x) and determine these so that
y
p
= u
1
(x)y
1
(x) + u
2
(x)y
2
(x) + + u
n
(x)y
n
(x)
is a particular solution of (1). To determine these n functions we must
impose n restrictions on them:
u
1
y
1
+ u
2
y
2
+ + u
n
y
n
= 0
u
1
y
1
+ u
2
y
2
+ + u
n
y
n
= 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
u
1
y
n1
1
+ u
2
y
n1
2
+ + u
n
y
n1
n
= R(x)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 37
The last condition indicates that the given dierential equation is satised.
Obtain u
1
, u
2
, , u
n
by Cramers rule and integrate to get u
1
, u
2
, , u
n
.
Cramers Rule
2
1
2
+ 2
3
= 2,
1
+ 10
2
3
3
= 5,
1
+
2
+
3
= 3,
=D =
2 1 2
1 10 3
1 1 1
= 46,
1
=
1
D
2 1 2
5 10 3
3 1 1
2
=
1
D
2 2 2
1 5 3
1 3 1
3
=
1
D
2 1 2
1 10 5
1 1 3
.
Example 1
Solve the following nonhomogeneous ordinary dierential equation
d
2
y
dx
2
+ y = sec x.
_
_
Recall : tanx =
sinx
cos x
, sec x =
1
cos x
,
cot x =
cos x
sinx
, csc x =
1
sinx
.
_
_
Homogeneous Solution:
d
2
y
dx
2
+ y = 0,
characteristic equation :
2
+ 1 = 0,
roots :
1
= i1,
2
= i1
=y
h
= c
1
cos x + c
2
sinx.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 38
Particular Solution: assume a trial solution
y
p
= u
1
(x) cos x + u
2
(x) sinx.
Restrictions:
u
1
cos x + u
2
sinx = 0
u
1
sinx + u
2
cos x = sec x
_
y
p
+ y
p
= sec x
_
=W =
cos x sinx
sinx cos x
= cos
2
x + sin
2
x = 1
u
1
=
1
W
0 sinx
sec x cos x
= sinxsec x =
sinx
cos x
= tanx,
u
2
=
1
W
cos x 0
sinx sec x
= cos xsec x = 1,
u
1
=
_
tanxdx = (lncos x) + c
= lncos x + c
,
u
2
=
_
dx = x + c
.
=y
p
= cos x(lncos x) + xsinx,
=y = y
h
+ y
p
= c
1
cos x + c
2
sinx + cos x(lncos x) + xsinx,
where c
and c
are incorporated in c
1
and c
2
Example 2 (Same as Example 1 of section 3.10.1)
Solve the following nonhomogeneous ordinary dierential equation
d
2
y
dx
2
y = 8xe
x
.
Homogeneous Solution:
y
h
= c
1
e
x
+ c
2
e
x
.
Particular Solution: assume that
y
p
= u
1
(x)e
x
+ u
2
(x)e
x
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 39
Restrictions:
u
1
e
x
+ u
2
e
x
= 0
u
1
e
x
u
2
e
x
= 8xe
x
_
y
p
y
p
= 8xe
x
_
=W =
e
x
e
x
e
x
e
x
= (1) 1 = 2,
u
1
=
1
2
0 e
x
8xe
x
e
x
=
8x
2
= 4x =u
1
= 2x
2
+ c
,
u
2
=
1
2
e
x
0
e
x
8xe
x
=
8x(e
x
)
2
2
= 4xe
2x
=u
2
= 2xe
2x
+ e
2x
+ c.
_
_
_
xe
2x
dx =
xe
2x
2
_
e
2x
2
dx =
xe
2x
2
e
2x
4
,
Integration by Parts :
_
u dv = uv
_
v du,
u = x, du = dx, dv = e
2x
dx, v =
e
2x
2
.
_
_
=y
p
= 2x
2
e
x
+ e
x
2xe
x
,
=y = y
h
+ y
p
= c
1
e
x
+ c
2
e
x
+ 2x
2
e
x
+ e
x
2xe
x
= c
1
e
x
+ c
2
e
x
2xe
x
+ 2x
2
e
x
Example 3
Solve the following nonhomogeneous ordinary dierential equation
(D
3
+ 4D)y = 4 cot 2x.
_
Recall : cot x =
cos x
sinx
, sec x =
1
cos x
.
_
Homogeneous Solution:
_
D
3
+ 4D
_
y = 0,
characteristic equation :
3
+ 4 = 0 =
_
2
+ 4
_
= 0,
roots :
1
= 0,
2
= 2i,
3
= 2i
=y
h
= c
1
+ c
2
cos 2x + c
3
sin2x.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 40
Particular Solution: assume that
y
p
= u
1
(x) + u
2
(x) cos 2x + u
3
(x) sin2x.
Restrictions:
u
1
+ u
2
cos 2x + u
3
sin2x = 0
0 2u
2
sin2x + 2u
3
cos 2x = 0
0 4u
2
cos 2x 4u
3
sin2x = 4 cot 2x
=W =
1 cos 2x sin2x
0 2 sin2x 2 cos 2x
0 4 cos 2x 4 sin2x
2 sin2x 2 cos 2x
4 cos 2x 4 sin2x
= 8
_
sin
2
2x + cos
2
2x
_
= 8,
u
1
=
1
W
0 cos 2x sin2x
0 2 sin2x 2 cos 2x
4 cot 2x 4 cos 2x 4 sin2x
=
4 cot 2x
8
cos 2x sin2x
2 sin2x 2 cos 2x
= cot 2x,
u
1
=
_
cot 2x dx =
1
2
lnsin2x + c,
u
2
=
1
W
1 0 sin2x
0 0 2 cos 2x
0 4 cot 2x 4 sin2x
= cos 2xcot 2x,
u
2
=
_
cos 2xcot 2x dx =
1
2
ln(csc 2x cot 2x)
1
2
cos 2x + c,
_
_
_
cos 2xcot 2x dx =
_
cos
2
2x
sin2x
dx
=
cos 2x
2
+
_
dx
sin2x
=
cos 2x
2
+
_
csc 2xdx
=
cos 2x
2
+
1
2
ln(csc 2x cot 2x)
_
_
u
3
=
1
W
1 cos 2x 0
0 2 sin2x 0
0 4 cos 2x 4 cot 2x
= sin2xcot 2x = cos 2x,
u
3
=
_
cos 2x dx =
sin2x
2
+ c.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 41
=y
p
=
1
2
lnsin2x
1
2
ln(csc 2x cot 2x) cos 2x
cos
2
2x
2
sin
2
2x
2
. .
1/2
=y = y
h
+ y
p
= c
1
+ c
2
cos 2x + c
3
sin2x +
lnsin2x
2
cos 2x
2
ln(csc 2x cot 2x),
where c
1
= c
1
1/2
3.11 Particular Solution by Inspection
_
b
0
D
n
+ b
1
D
n1
+ + b
n1
D + b
n
_
y = R(x)
If R(x) = R
o
= constant and b
n
= 0, then
y
p
=
R
o
b
n
.
If R(x) = R
o
, b
n
= 0 and D
k
y is the lowestorder derivative in the
ordinary dierential equation, then
y
p
=
R
o
x
k
k! b
nk
.
Note that b
nk
is always the coecient of D
k
y (the lowestorder derivative).
Example 1
Solve the following nonhomogeneous ordinary dierential equation
_
D
2
3D + 2
_
y = (D 1)(D 2)y = 16.
y
h
= c
1
e
x
+ c
2
e
2x
,
y
p
=
R
o
b
n
=
16
2
= 8,
=y = c
1
e
x
+ c
2
e
2x
+ 8
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 42
Example 2
Solve the following nonhomogeneous ordinary dierential equation
d
5
y
dx
5
+ 4
d
3
y
dx
3
= 7.
Homogeneous Solution:
d
5
y
dx
5
+ 4
d
3
y
dx
3
= 0,
characteristic equation :
5
+ 4
3
= 0 =
3
_
2
+ 4
_
= 0,
roots :
1
=
2
=
3
= 0,
4
= 2i,
5
= 2i
=y
h
= c
1
+ c
2
x + c
3
x
2
+ c
4
cos 2x + c
5
sin2x.
Particular Solution: by inspection
y
p
=
R
o
x
k
k!b
nk
=
7x
3
3!4
=
7x
3
24
.
=y = y
h
+ y
p
= c
1
+ c
2
x + c
3
x
2
+ c
4
cos 2x + c
5
sin2x +
7x
3
24
3.12 Equations with Variable Coecients
3.12.1 EulerCauchy Equation
The EulerCauchy equation has the form
_
b
0
x
n
D
n
+ b
1
x
n1
D
n1
+ + b
n1
xD + b
n
_
y = R(x).
Apply the following transformation
x = e
t
dx = e
t
dt
dx
dt
= e
t
,
and use the results
xD = D
t
=
d
dt
x
2
D
2
= D
t
(D
t
1)
x
3
D
3
= D
t
(D
t
1)(D
t
2)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 43
to reduce the equation to one with constant coecients.
Derivation of xD and x
2
D
2
Dy =
dy
dx
=
dy
dt
dt
dx
. .
chain rule
=
dy
dt
_
dx
dt
_
1
=
dy
dt
_
e
t
_
1
= e
t
D
t
y
=x(Dy) = x
_
e
t
D
t
y
_
, x = e
t
=xDy = D
t
y
=xD = D
t
D
2
y =
d
2
y
dx
2
=
d
dx
_
e
t
D
t
y
_
=
d
dt
_
e
t
D
t
y
_
dt
dx
=
_
e
t
D
t
y + e
t
D
2
t
y
_
dt
dx
..
e
t
= e
2t
_
D
2
t
D
t
_
y
=x
2
D
2
y = e
2t
_
e
2t
_
D
2
t
D
t
_
y
=
_
D
2
t
D
t
_
y = D
t
(D
t
1)y
=x
2
D
2
= D
t
(D
t
1)
Example
Solve the following nonhomogeneous ordinary dierential equation
_
x
2
D
2
+ xD 4
_
y = x
3
.
Applying the transformation
x = e
t
xD = D
t
x
2
D
2
= D
t
(D
t
1)
yields the following nonhomogeneous ordinary dierential equation with
constant coecients
[D
t
(D
t
1) + D
t
4] y =
_
e
t
3
=
_
D
2
t
4
_
y = e
3t
.
Homogeneous Solution:
_
D
2
t
4
_
y = 0,
characteristic equation :
2
4 = 0,
roots :
1
= 2,
2
= 2
=y
h
= c
1
e
2t
+ c
2
e
2t
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 44
Particular Solution: assume a trial solution
y
p
= Ae
3t
,
dy
p
dt
= 3Ae
3t
,
d
2
y
p
dt
2
= 9Ae
3t
=
_
D
2
t
4
_
y
p
= e
3t
=9Ae
3t
4Ae
3t
= e
3t
=5A = 1 =A =
1
5
=y
p
=
e
3t
5
.
y = y
h
+ y
p
= c
1
e
2t
+ c
2
e
2t
+
e
3t
5
x = e
t
=y = c
1
x
2
+ c
2
x
2
+
x
3
5
3.12.2 Another Approach
Ordinary dierential equations with variable coecients in the form of the
EulerCauchy equation can also be solved by employing the following trial
solution
y = x
p
and then solving for p. Revisiting the previous example:
_
x
2
D
2
+ xD 4
_
y = x
3
Dy = px
p1
, D
2
y = p(p 1)x
p2
=x
2
_
p(p 1)x
p2
+ xpx
p1
4x
p
= x
3
.
Homogeneous Solution:
p(p 1)x
p
+ px
p
4x
p
= 0,
characteristic equation : p(p 1) + p 4 = 0
=p
2
4 = 0
roots : p = 2 (y
h
= x
p
)
=y
h
= c
1
x
2
+ c
2
x
2
.
Particular Solution: y
p
is obtained as shown in the previous section
y
p
=
e
3t
5
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 45
Case of Complex Roots
p = i
y
h
= c
1
x
(+i)
+ c
2
x
(i)
= x
_
c
1
x
i
+ c
2
x
i
_
x
i
= e
i ln x
= cos( lnx) + i sin( lnx)
x
i
= e
i ln x
= cos( lnx) i sin( lnx)
=y
h
= x
[(c
1
+ c
2
) cos( lnx) + i(c
1
c
2
) sin( lnx)]
= x
[Acos( lnx) + B sin( lnx)] ,
where A = c
1
+ c
2
, B = i(c
1
c
2
).
Case of Double Root
y
1
= x
p
,
y
2
= (lnx)x
p
.
Example
Consider the following ordinary dierential equation
_
x
2
D
2
3xD + 4
_
y = 0.
Apply the transformation
y = x
p
=x
2
_
p(p 1)x
p2
3xpx
p1
+ 4x
p
= 0
=p(p 1)x
p
3px
p
+ 4x
p
= 0
=p
2
4p + 4 = 0
=(p 2)
2
= 0
roots : p
1
= p
2
= 2 (double root)
solutions : y
1
= x
2
, y
2
= (lnx)x
2
=y = c
1
x
2
+ c
2
(lnx)x
2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 46
3.13 Case where One Solution is Known (Reduction of Order)
If one solution y
1
= f(x) of g(D)y = R(x) is known, then the substitution
y = u(x)f(x)
transforms the dierential equation into one of order n 1 in u
(x).
Example
Solve the following dierential equation, given that y
1
= x
_
1 x
2
_
d
2
y
dx
2
2x
dy
dx
+ 2y = 0.
Assume that
y
2
= u(x)x,
dy
2
dx
= u + u
x,
d
2
y
2
dx
2
= 2u
+ u
x
=
_
1 x
2
_
(2u
+ u
x) 2x(u + u
x) + 2ux = 0
=
_
x x
3
_
u
+
_
2 4x
2
_
u
= 0 (rst order in u
)
=
du
+
2 4x
2
x x
3
dx = 0
_
2 4x
2
x x
3
=
2
_
1 x
2
_
2x
2
x(1 x
2
)
_
=
_
du
+
_ _
2
x
2x
1 x
2
_
dx = c
=lnu
+ 2 lnx + ln
_
1 x
2
_
= c
=u
x
2
_
1 x
2
_
= e
c
= c
1
=u
=
c
1
x
2
(1 x
2
)
= c
1
_
1
x
2
+
1
1 x
2
_
_
1
1 x
2
=
1
2
_
1
x + 1
+
1
1 x
__
=u = c
1
_
1
x
+
1
2
ln
_
1 + x
1 x
__
+ c
2
=y
2
= ux = c
1
_
x
2
ln
_
1 + x
1 x
_
1
_
+ c
2
x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 47
3.14 Exercises
(1) Obtain the Wronskian of the functions 1, x, x
2
, . . ., x
n1
for n > 1.
(2) Show that the operators D 2 and xD + 1 are not commutative with
respect to multiplication.
(3) Show that the functions cos 2x, sin
2
x, cos
2
x are linearly dependent.
(4) Let y
1
(x), y
2
(x) be solutions of
y
+ p(x)y
+ q(x)y = 0.
Prove that the Wronskian is
W = y
1
y
2
y
2
y
1
= C exp
_
_
pdx
_
.
(5) Solve the following equations:
(a)
_
D
3
D
2
4D + 4
_
y = 0
(b)
_
6D
4
+ 23D
3
+ 28D
2
+ 13D + 2
_
y = 0
(c)
_
D
4
5D
2
6D 2
_
y = 0
(d)
_
D
4
+ 2D
3
+ 10D
2
_
y = 0
(e)
_
D
6
+ 9D
4
+ 24D
2
+ 16
_
y = 0
(6) Use the method of undetermined coecients to obtain the general so-
lution of
_
D
2
+ D
_
y = sinx.
(7) Use the method of variation of parameters to obtain the general solution
of
_
D
2
4D + 4
_
y = exp[x].
(8) Find the general solution of the following equations:
(a)
_
x
2
D
2
2
_
y = 3x
2
(b)
_
x
2
D
2
+ xD 1
_
y = 4
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 48
Chapter 4
Series Solutions of Dierential Equations
4.1 Properties of Power Series
A large class of ordinary dierential equations possesses solutions express-
ible, over a certain interval, in terms of power series and related series.
Before investigating methods of obtaining such solutions, we review with-
out proof certain useful properties of power series. An expression of the
form
a
0
+ a
1
(x x
0
) + + a
n
(x x
0
)
n
+ =
n=0
a
n
(x x
0
)
n
(1)
is called power series, where a
0
, a
1
, , a
n
, are the coecients of the
series, and x
0
is a constant known as the center of the series. The expression
S
n
(x) = a
0
+ a
1
(x x
0
) + + a
n
(x x
0
)
n
is the nth partial sum, and
R
n
(x) = a
n+1
(x x
0
)
n+1
+ a
n+2
(x x
0
)
n+2
+
is the remainder. A power series is dened as the limit
lim
N
N
n=0
a
n
(x x
0
)
n
or lim
N
S
n
(x)
for those values of x for which the limit exists. For such values of x the
series is said to converge.
To determine for what values of x the series (1) converges, we may
make use of the ratio test:
= lim
n
n+1
|x x
0
| = L|x x
0
|,
where
L = lim
n
n+1
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 49
It follows that (1) converges when
|x x
0
| <
1
L
,
diverges when
|x x
0
| >
1
L
,
and the interval of converge is
_
x
0
1
L
, x
0
+
1
L
_
.
The distance R =
1
L
is the radius of convergence.
4.2 Convergence of Power Series
Theorem: If
n=0
n
x
n
is a power series, then either
(a) The series converges absolutely for all x; or
(b) The series converges only when x = 0; or
(c) There exists a number R > 0 such that the series converges absolutely
if |x| < R and diverges if |x| > R.
Example
Find the interval of convergence of
n=1
x
n
n 3
n
.
L = lim
n
n+1
= lim
n
1/([n + 1] 3
n+1
)
1/(n 3
n
)
= lim
n
n
3(n + 1)
=
1
3
.
Therefore, the interval of convergence is [-3, 3). If |x| < 3 the series con-
verges; however, if |x| > 3 the series diverges. Note that when x = 3 we
have the divergent harmonic series
1
n
, and when x = 3, the convergent
alternating series
(1)
n
n
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 50
4.3 Some Series Expansions
e
x
= 1 + x +
x
2
2!
+
x
3
3!
+
x
4
4!
+ +
x
n
n!
+ =
i=0
x
i
i!
sin x = x
x
3
3!
+
x
5
5!
x
7
7!
+
x
9
9!
+ (1)
i+1
x
2i+1
(2i + 1)!
+
=
i=0
(1)
i+1
x
2i+1
(2i + 1)!
cos x = 1
x
2
2!
+
x
4
4!
x
6
6!
+
x
8
8!
+ + (1)
i
x
2i
(2i)!
+
=
i=0
(1)
i
x
2i
(2i)!
sinh x = x +
x
3
3!
+
x
5
5!
+
x
7
7!
+
x
9
9!
+ +
x
2i+1
(2i + 1)!
+
=
i=0
x
2i+1
(2i + 1)!
cosh x = 1 +
x
2
2!
+
x
4
4!
+
x
6
6!
+
x
8
8!
+ +
x
2i
(2i)!
+ =
i=0
x
2i
(2i)!
e
x
= 1 x +
x
2
2!
x
3
3!
+
x
4
4!
x
5
5!
+ + (1)
n
x
n
n!
+
=
i=0
(1)
i
x
i
i!
e
x
2
= 1 + x
2
+
x
4
2!
+
x
6
3!
+
x
8
4!
+
x
10
5!
+ +
x
2n
n!
+ =
i=0
x
2i
i!
ln(1 + x) = x
x
2
2
+
x
3
3
=
n=1
(1)
n+1
x
n
n
for |x| < 1
1
1 x
= 1 + x + x
2
+ =
n=0
x
n
for |x| < 1
(1 + x)
p
= 1 + px +
p(p 1)x
2
2
+
p(p 1)(p 2)x
3
3!
+ for |x| < 1
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 51
4.4 Operations on Power Series
Convergent power series can be treated, for many purposes, in the same
way as polynomials.
4.4.1 Termwise Dierentiation or Integration
Inside its interval of convergence, a power series represents a continuous
function of x with continuous derivatives of all orders. Inside this interval,
a power series can be integrated or dierentiated term by term, and the
resultant series will converge in the same interval. For example consider
the dierentiation of y(x):
y(x) =
m=0
a
m
(x x
0
)
m
y
(x) =
m=1
ma
m
(x x
0
)
m1
.
4.4.2 Termwise Addition or Subtraction
Consider the following two power series
f(x) =
m=0
a
m
(x x
0
)
m
R
f
,
g(x) =
m=0
b
m
(x x
0
)
m
R
g
,
f(x) + g(x) =
m=0
(a
m
+ b
m
)(x x
0
)
m
.
Note that the radius of convergence of f(x) + g(x) is at least equal to the
smaller of R
f
and R
g
.
4.4.3 Termwise Multiplication
f(x) g(x) =
m=0
a
m
(x x
0
)
m
n=0
b
n
(x x
0
)
n
=
k=0
c
k
(x x
0
)
k
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 52
where
c
k
= a
0
b
k
+ a
1
b
k1
+ + a
k
b
0
=
k
m=0
a
m
b
km
,
and the resulting series converges at least for |x| < min(R
f
, R
g
).
4.4.4 Termwise Division
f(x)
g(x)
=
m=0
a
m
(x x
0
)
m
n=0
b
n
(x x
0
)
n
=
k=0
d
k
(x x
0
)
k
,
where the ds are to be determined by the following expressions
a
m
=
m
k=0
b
mk
d
k
(m = 0, 1, 2, ),
a
0
= b
0
d
0
,
a
1
= b
1
d
0
+ b
0
d
1
,
a
2
= b
2
d
0
+ b
1
d
1
+ b
0
d
2
.
4.5 Illustrative Examples of the Power Series Method
Example 1 (Hildebrand, 1976, p. 122)
Consider the ordinary dierential equation
d
2
y
dx
2
y = 0.
Assume a solution in the form
y = a
0
+ a
1
x + a
2
x
2
+ a
3
x
3
+ a
4
x
4
+ a
5
x
5
+
and that the series converges in an interval including x = 0. Dierentiating
twice term by term the proposed solution y yields
d
2
y
dx
2
= 2a
2
+ 6a
3
x + 12a
4
x
2
+ 20a
5
x
3
+
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 53
Substituting back into the original ordinary dierential equation yields
d
2
y
dx
2
y = (2a
2
a
0
)+(6a
3
a
1
)x+(12a
4
a
2
)x
2
+(20a
5
a
3
)x
3
+ = 0.
In order for this equation to be valid over an interval, it is necessary that
the coecients of all powers of x vanish independently. Therefore,
2a
2
= a
0
, a
2
=
a
0
2
,
6a
3
= a
1
, a
3
=
a
1
6
,
12a
4
= a
2
, a
4
=
a
2
12
=
a
0
24
,
20a
5
= a
3
, a
5
=
a
3
20
=
a
1
120
.
=y = a
0
_
1 +
x
2
2
+
x
4
24
+
_
. .
cosh x
+a
1
_
x +
x
3
6
+
x
5
120
+
_
. .
sinh x
=y = a
0
cosh x + a
1
sinhx
Note that the expected solution is of the form
y = a
0
e
x
+ a
1
e
x
,
however, both forms are identical because
sinh =
e
x
e
x
2
, cosh =
e
x
+ e
x
2
.
A More Compact Procedure
y =
k=0
a
k
x
k
,
d
2
y
dx
2
=
k=0
k(k 1)a
k
x
k2
,
=
d
2
y
dx
2
y =
k=0
k(k 1)a
k
x
k2
k=0
a
k
x
k
= 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 54
It should be noted that
k=0
a
k
x
k
=
k2=0
a
k2
x
k2
=
k=2
a
k2
x
k2
,
=
k=0
k(k 1)a
k
x
k2
k=2
a
k2
x
k2
= 0.
The rst two terms (k = 0, 1) of the rst summation in the preceding
equation are zero, thus it may be written as
k=2
[k(k 1)a
k
a
k2
]x
k2
= 0.
By equating to zero the coecients of all powers yields the following ex-
pression known as the Recurrence Formula for a
k
k(k 1)a
k
= a
k2
(k = 2, 3, ).
Example 2
Consider the following ordinary dierential equation
Ly = x
2
d
2
y
dx
2
+
_
x
2
+ x
_
dy
dx
y = 0.
Assuming a solution of the form
y =
k=0
a
k
x
k
,
dy
dx
=
k=0
ka
k
x
k1
,
d
2
y
dx
2
=
k=0
k(k 1)a
k
x
k2
.
=Ly =
k=0
k(k 1)a
k
x
k
+
k=0
ka
k
x
k+1
+
k=0
ka
k
x
k
k=0
a
k
x
k
= 0.
Combining the 1st, 3rd and 4th summations yields
k=0
[k(k 1) +k 1]a
k
x
k
+
k=0
ka
k
x
k+1
= 0,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 55
replacing k by k 1 in the second summation in the preceding expression
yields
k=0
(k
2
1)a
k
x
k
+
k=1
(k 1)a
k1
x
k
= 0
=a
0
+
k=1
[(k
2
1)a
k
+ (k 1)a
k1
]x
k
= 0.
The constant term, as well as the coecients of the successive powers of x
must vanish independently. Therefore
a
0
= 0,
(k 1) [(k + 1)a
k
+ a
k1
] = 0 (k = 1, 2, 3, ) Recurrence Formula.
The temptation to cancel the common factor k1 before setting k = 1 in the
recurrence formula must be resisted. The recurrence formula is identically
satised when k = 1.
For k 2, a
k
=
a
k1
k + 1
(k = 2, 3, 4, )
a
2
=
a
1
3
,
a
3
=
a
2
4
=
a
1
3 4
,
a
4
=
a
3
5
=
a
1
3 4 5
.
Note that for this example a
0
= 0 and a
1
= arbitrary. The solution is
expressed as follows:
y = a
1
_
x
x
2
3
+
x
3
3 4
x
4
3 4 5
+
_
=
2a
1
x
_
x
2
2!
x
3
3!
+
x
4
4!
x
5
5!
+
_
=
2a
1
x
_
1 + x +
_
1
x
1!
+
x
2
2!
x
3
3!
+
x
4
4!
x
5
5!
+
__
=y = c
_
e
x
1 + x
x
_
,
where c = 2a
1
. It should be noted that for this case only one solution is
obtained. This fact indicates that any linear independent solution cannot
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 56
be expanded in power series near x = 0, that is, it is not regular at x = 0.
A second solution can be obtained by the method of reduction of order.
Example 3
Using the power series method obtain the general solution to the following
2ndorder ordinary dierential equation
Ly = x
3
d
2
y
dx
2
+ y = 0.
Assume a solution of the form
y =
k=0
a
k
x
k
,
=Ly =
k=0
k(k 1)a
k
x
k+1
+
k=0
a
k
x
k
= 0.
Replacing k by k 1 in the rst summation yields
k=1
(k 1)(k 2)a
k1
x
k
+
k=0
a
k
x
k
= 0
=a
0
+
k=1
[a
k
+ (k 1)(k 2)a
k1
]x
k
= 0
a
0
= 0,
a
k
= (k 1)(k 2)a
k1
(k = 1, 2, 3, ) Recurrence Formula
a
1
= a
2
= a
3
= = 0
=y = 0
Thus, it follows that the equation possesses no nontrivial solutions which
are regular at x = 0.
4.6 Regular Points of Linear 2ndOrder Dierential Equations
The standard form of a 2ndorder ordinary dierential equation is:
d
2
y
dx
2
+ p(x)
dy
dx
+ q(x)y = 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 57
The behavior of solutions of the equation near a point x = x
0
depends upon
the behavior of the coecients p(x) and q(x) near x = x
0
.
Regular (or ordinary) point: if p(x) and q(x) are regular or analytic at
x = x
0
, that is, if p(x) and q(x) can be expanded in power series in an
interval including x = x
0
.
Singular point: otherwise.
Regular singular point: if the products (x x
0
)p(x) and (x x
0
)
2
q(x) are
both regular at x = x
0
.
Irregular singular point: otherwise.
If x = x
0
is a regular point, then there are two linearly independent solu-
tions which are regular at x = x
0
, and hence are both expressible in the
form
y =
k=0
a
k
(x x
0
)
k
.
If x = x
0
is a regular singular point, the equation doesnt necessarily possess
any nontrivial solution which is regular near x = x
0
, but that at least one
solution exists of the form
y = (x x
0
)
r
k=0
a
k
(x x
0
)
k
.
Such solution is regular at x = x
0
only if r is zero or a positive integer. If
x = x
0
is an irregular singular point, a nontrivial solution may or may not
exist and the equation cannot have two independent solutions of this type.
4.7 Method of Frobenius
Consider the following 2ndorder dierential equation
x
2
y
+ xb(x)y
+ c(x)y = 0.
Reducing the equation to standard form yields
y
+
b(x)
x
y
+
c(x)
x
2
y = 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 58
Note that x = 0 is a singular point, and b(x), c(x) are analytic. Therefore,
one solution of the form
y(x) = x
r
m=0
a
m
x
m
= x
r
_
a
0
+ a
1
x + a
2
x
2
+
_
a
0
= 0,
y
(x) =
m=0
(m + r)a
m
x
m+r1
,
y
(x) =
m=0
(m + r)(m + r 1)a
m
x
m+r2
.
Note that r may be any real or complex number. Then, assuming that we
can expand b(x) and c(x) as follows
b(x) = b
0
+ b
1
x + b
2
x
2
+ ,
c(x) = c
0
+ c
1
x + c
2
x
2
+ ,
the original ordinary dierential equation can be written as
m=0
(m + r)(m + r 1)a
m
x
m+r
+ (b
0
+ b
1
x + )
m=0
(m + r)a
m
x
m+r
+
+ (c
0
+ c
1
x + )
m=0
a
m
x
m+r
= 0.
This expression must vanish identically, in the sense that the coecients of
all powers of x must vanish identically.
For x
r
:
[r(r 1) +b
0
r + c
0
]a
0
= 0,
a
0
= 0,
r
2
+ (b
0
1)r + c
0
= 0, Indicial Equation.
Case1: Distinct Roots (r
1
, r
2
)
y
1
(x) = x
r
1
m=0
a
m
x
m
, y
2
(x) = x
r
2
m=0
A
m
x
m
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 59
Case 2: Double Root
y
1
(x) = x
r
m=0
a
m
x
m
, y
2
(x) = y
1
(x) lnx + x
r
m=1
A
m
x
m
.
Case 3: Roots Diering by an Integer k
y
1
(x) = x
r
1
m=0
a
m
x
m
, y
2
(x) = ky
1
(x) lnx + x
r
2
m=0
A
m
x
m
.
Example
Solve the following dierential equation by the method of Frobenius
x(1 x)y
+
_
3
2
7x
2
_
y
3y
2
= 0.
Assume a solution of the form
y = x
r
m=0
a
m
x
m
,
y
m=0
(m + r)a
m
x
m+r1
,
y
m=0
(m + r)(m +r 1)a
m
x
m+r2
.
The original equation can be written as follows
m=0
(m + r)(m + r 1)a
m
x
m+r1
m=0
(m + r)(m + r 1)a
m
x
m+r
+
3
2
m=0
(m + r)a
m
x
m+r1
7
2
m=0
(m + r)a
m
x
m+r
3
2
m=0
a
m
x
m+r
= 0.
Combining the 1st and 3rd summations, as well as the 2nd, 4th and 5th
summations yields
m=0
_
(m + r)(m + r 1) +
3
2
(m + r)
_
a
m
x
m+r1
m=0
_
(m + r)(m + r 1) +
7
2
(m + r) +
3
2
_
a
m
x
m+r
= 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 60
Shifting the 1st summation leads to
m+1=0
_
(m + 1 +r)(m + r) +
3
2
(m + 1 +r)
_
a
m+1
x
m+r
m=0
_
(m + r)(m + r 1) +
7
2
(m + r) +
3
2
_
a
m
x
m+r
= 0
=
_
r(r 1) +
3r
2
_
a
0
x
r1
+
m=0
_
(m + 1 +r)
_
m + r +
3
2
_
a
m+1
_
(m + r)
_
m + r +
5
2
_
+
3
2
_
a
m
_
x
m+r
= 0.
x
r1
terms:
r(r 1) +
3r
2
= 0 =r
2
r +
3r
2
= 0 =r
2
+
r
2
= 0 =r
_
r +
1
2
_
= 0
= Two distinct roots : r
1
=
1
2
, r
2
= 0.
x
m+r
terms:
a
m+1
=
(m + r)
_
m + r +
5
2
_
+
3
2
(m + 1 +r)
_
m + r +
3
2
_ a
m
(a) r
1
=
1
2
a
m+1
=
_
m
1
2
_
(m + 2) +
3
2
_
m +
1
2
_
(m + 1)
a
m
=
m
2
+
3
2
m +
1
2
m
2
+
3
2
m +
1
2
a
m
= a
m
= a
0
.
=y
1
= x
1/2
m=0
a
0
x
m
=y
1
=
a
0
x
1/2
1 x
for |x| < 1,
m=0
x
m
=
1
1 x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 61
(b) r
2
= 0
A
m+1
=
m
_
m +
5
2
_
+
3
2
(m + 1)
_
m +
3
2
_ A
m
=
m
2
+
5
2
m +
3
2
m
2
+
5
2
m +
3
2
A
m
= A
m
= A
0
=y
2
=
m=0
A
0
x
m
= A
0
1
1 x
The desired solution is
y =
a
0
1 x
x
1/2
+
A
0
1 x
4.8 Important 2ndOrder Equations
Bessels equation:
x
2
d
2
y
dx
2
+ x
dy
dx
+
_
x
2
2
_
y = 0.
Legendres equation:
_
1 x
2
_
d
2
y
dx
2
2x
dy
dx
+ n(n + 1)y = 0.
Gausss equation:
x(1 x)
d
2
y
dx
2
+ [ ( + + 1)x]
dy
dx
y = 0.
Other notable equations:
(1) x
d
2
y
dx
2
+ (c x)
dy
dx
+ ay = 0,
satised by the conuent hypergeometric function of Kummer
y = M(a, c, x).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 62
If c = 1 and a = n (where n is a positive integer or zero) one solution is
the nth Laguerre polynomial
y = L
n
(x).
(2)
d
2
y
dx
2
2x
dy
dx
+ 2ny = 0,
satised by the nth Hermite polynomial
y = H
n
(x).
(3)
_
1 x
2
_
d
2
y
dx
2
x
dy
dx
+ n
2
y = 0,
satised by the nth Chebyshev polynomial
y = T
n
(x).
(4) x(1 x)
d
2
y
dx
2
+ [a (1 +b)x]
dy
dx
+ n(b +n)y = 0,
satised by the nth Jacobi polynomial
y = J
n
(a, b, x).
4.9 Legendres Equation
Solutions of the following dierential equation
_
1 x
2
_
d
2
y
dx
2
2x
dy
dx
+ n(n + 1)y = 0,
or equivalently
d
dx
_
_
1 x
2
_
dy
dx
_
+ n(n + 1)y = 0,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 63
are known as Legendre functions of order n, where n is assumed here to be
real and nonnegative. They are of particular use in the solution of potential
problems involving spherical boundaries.
Since the coecients of this equation are analytic at x = 0, we may
apply the power series method. Substituting
y =
m=0
a
m
x
m
,
y
m=0
ma
m
x
m1
, y
m=0
m(m1)a
m
x
m2
,
into the governing dierential equation and letting k = n(n + 1) yields
m=0
m(m1)a
m
x
m2
m=0
m(m1)a
m
x
m
2
m=0
ma
m
x
m
+ k
m=0
a
m
x
m
= 0
=
m+2=0
(m + 2)(m + 1)a
m+2
x
m
m=0
[m(m1) + 2mk]a
m
x
m
= 0
=
m=0
{(m + 2)(m + 1)a
m+2
[m(m1) + 2mk]a
m
}x
m
= 0.
Coecients of x
0
:
2a
2
+ ka
0
= 0.
Coecients of x
1
:
6a
3
(2 k)a
1
= 0.
Coecients of x
m
(m 2):
a
m+2
=
m
2
+ mk
(m + 2)(m + 1)
a
m
, k = n(n + 1)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 64
a
2
=
n(n + 1)
2!
a
0
,
a
3
=
2 n(n + 1)
6
a
1
=
(n 1)(n + 2)
3!
a
1
,
a
4
=
6 n(n + 1)
4 3
a
2
=
(n 2)n(n + 1)(n + 3)
4!
a
0
,
a
5
=
(n 3)(n + 4)
5 4
a
3
=
(n 3)(n 1)(n + 2)(n + 4)
5!
a
1
.
Therefore, the desired solution is of the form
y = a
0
U
n
(x) +a
1
V
n
(x),
where
U
n
(x) = 1
n(n + 1)
2!
x
2
+
(n 2)n(n + 1)(n + 3)
4!
x
4
+
V
n
(x) = x
(n 1)(n + 2)
3!
x
3
+
(n 3)(n 1)(n + 2)(n + 4)
5!
x
5
+
Note that these series converge for |x| < 1. Since U
n
contains even powers
of x only, while V
n
contains odd powers of x only, the ratio U
n
/V
n
is
not a constant so that U
n
and V
n
are not proportional and thus linearly
independent solutions.
If n is even, then U
n
is a polynomial of degree n, and V
n
is an innite series.
If n is odd, then U
n
is an innite series, and V
n
is a polynomial of degree n.
Conventional Terminology
The multiple of the polynomial of degree n which has the value unity when
x = 1 is called the nth Legendre polynomial and is denoted by P
n
(x).
P
n
(x) =
U
n
(x)
U
n
(1)
n is even
P
n
(x) =
V
n
(x)
V
n
(1)
n is odd
The rst six Legendre polynomials are:
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 65
-1
-0.5
0
0.5
1
P
n
(x)
-1 -0.5 0 0.5 1
x
P
0
P
1
P
2
P
3
P
4
P
5
Figure 4.1: Plot of the rst six Legendre polynomials as a function of x.
P
0
(x) = 1,
P
1
(x) = x,
P
2
(x) =
1
2
_
3x
2
1
_
,
P
3
(x) =
1
2
_
5x
3
3x
_
,
P
4
(x) =
1
8
_
35x
4
30x
2
+ 3
_
,
P
5
(x) =
1
8
_
63x
5
70x
3
+ 15x
_
.
These Legendre polynomials are graphically presented in Figure 4.1, where
it can be seen that:
All the zeros of P
n
(x) are real and unrepeated,
All the zeros lie in the interval 1 < x < 1,
In the interval 1 x 1 the magnitude of each P
n
(x) is maximum at
the end points, so that |P
n
(x)| 1 when |x| 1,
Outside the interval (-1,1), P
n
(x) increases or decreases steadily without
maxima or minima or turning points.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 66
Suitable multiples of U
n
(x) and V
n
(x) are called Legendre Functions of the
Second Kind and are denoted by Q
n
(x). It is conventional to take
Q
n
(x) =
_
_
_
V
n
(1)U
n
(x) n odd,
U
n
(1)V
n
(x) n even.
Thus the general solution is written in the form
y = c
1
P
n
(x) +c
2
Q
n
(x).
Rodrigues formula: The Legendre polynomials can also be expressed by
P
n
(x) =
1
2
n
n!
d
n
dx
n
_
x
2
1
_
n
.
Note that:
U
0
(1) = 1, U
n
(1) = (1)
n
2
2 4 6 n
1 3 5 (n 1)
(n = 2, 4, 6, ),
V
1
(1) = 1, V
n
(1) = (1)
n1
2
2 4 6 (n 1)
1 3 5 n
(n = 3, 5, 7, ).
Recurrence formulas:
P
n+1
(x) =
2n + 1
n + 1
xP
n
(x)
n
n + 1
P
n1
(x),
P
n+1
(x) P
n1
(x) = (2n + 1)P
n
(x).
Generating function:
1
1 2xt + t
2
=
n=0
P
n
(x)t
n
.
Examples
Given that P
0
(x) = 1, P
1
(x) = x. Find (a) P
2
(x) and (b) P
3
(x).
(a) using the recurrence formula with n = 1
P
2
(x) =
3
2
xP
1
(x)
1
2
P
0
(x)
=
3
2
x
2
1
2
=
1
2
_
3x
2
1
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 67
(b) using the recurrence formula with n = 2
P
3
(x) =
5
3
xP
2
(x)
2
3
P
1
(x)
=
5
3
x
_
3x
2
1
2
_
2
3
x
=
5x
3
2
5x
6
2x
3
=
1
2
_
5x
3
3x
_
4.10 Associated Legendre Functions
The following dierential equation
_
1 x
2
_
d
2
y
dx
2
2x
dy
dx
+
_
n(n + 1)
m
2
1 x
2
_
y = 0,
diers from Legendres equation only in the presence of the term involving
m. This equation has a solution of the form
y = c
1
P
m
n
(x) +c
2
Q
m
n
(x),
where
P
m
n
(x) =
_
1 x
2
_m
2
d
m
P
n
(x)
dx
m
,
Q
m
n
(x) =
_
1 x
2
_m
2
d
m
Q
n
(x)
dx
m
.
4.11 Bessels Equation
One of the most important dierential equations in applied mathematics is
x
2
d
2
y
dx
2
+ x
dy
dx
+
_
x
2
2
_
y = 0,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 68
where is a given real, nonnegative number. Bessels equation has a regular
singular point at x = 0, hence it has solutions of the form
y(x) = x
r
m=0
a
m
x
m
,
y
(x) =
m=0
(m + r)a
m
x
m+r1
,
y
(x) =
m=0
(m + r)(m + r 1)a
m
x
m+r2
.
Substituting the trial solution into Bessels equation yields
m=0
(m + r)(m + r 1)a
m
x
m+r
+
m=0
(m + r)a
m
x
m+r
+
+
m=0
a
m
x
m+r+2
m=0
a
m
x
m+r
= 0
m=0
_
(m + r)(m + r 1) + (m + r)
2
a
m
x
m+r
+
m=0
a
m
x
m+r+2
= 0,
shifting the rst summation by 2 leads to
m+2=0
_
(m + r + 2)(m + r + 1) + (m + r + 2)
2
a
m+2
x
m+r+2
+
+
m=0
a
m
x
m+r+2
= 0,
expanding the rst two terms (m = 2 and m = 1) and combining the
summations yields
m=0
__
(m + r + 2)(m + r + 1) + (m + r + 2)
2
a
m+2
+ a
m
_
x
m+r+2
+
+
_
r(r 1) +r
2
a
0
x
r
+
_
(r + 1)r + (r + 1)
2
a
1
x
r+1
= 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 69
x
r
terms:
_
r(r 1) +r
2
a
0
= 0 =(r + )(r ) = 0,
roots : r
1
= ,
r
2
= .
x
r+1
terms:
_
(r + 1)
2
a
1
= 0. ()
x
m+r+2
terms:
_
(m +r + 2)
2
a
m+2
+ a
m
= 0 (m = 0, 1, 2, 3, ). ()
For r = :
()
_
( + 1)
2
a
1
= 0 =[1 + 2]a
1
= 0,
recall that is real nonnegative number ( 0), thus
a
1
= 0,
()
_
(m + + 2)
2
a
m+2
+ a
m
= 0
given that a
1
= 0 and 0
a
3
= a
5
= = 0,
=a
m+2
=
a
m
(m + 2 + 2)(m + 2)
(m = 0, 2, 4, ).
The coecient a
0
is arbitrary and it is customary to let
a
0
=
1
2
( + 1)
,
where ( + 1) is the Gamma function.
a
2
=
a
0
2
2
( + 1)
=
1
2
2+
( + 1) ( + 1)
=
1
2
2+
1! ( + 2)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 70
a
4
=
a
2
2
2
2 ( + 2)
=
1
2
4+
2! ( + 2) ( + 2)
=
1
2
4+
2! ( + 3)
=a
2m
=
(1)
m
2
2m+
m! ( + m + 1)
(m = 1, 2, ).
Given these coecients, the rst solution corresponding to r = can be
expressed as
J
(x) = x
m=0
(1)
m
x
2m
2
2m+
m! ( + m + 1)
, 0.
The preceding expression is known as Bessel Function of the First Kind
and Order . The series converges for all x. If = n = integer,
J
n
(x) = x
n
m=0
(1)
m
x
2m
2
2m+n
m! (n + m)!
, n = integer.
Note that the following relationship was employed for the derivation of the
preceding expression
(n + m + 1) = (n + m)! n + m = integer.
For r
2
= the solution can be obtained by replacing by in J
(x)
J
(x) = x
m=0
(1)
m
x
2m
2
2m
m! (m + 1)
, 0.
Therefore, the solution to Bessels equation can also be written as
y(x) = C
1
J
(x) +C
2
J
(x),
where is real and nonnegative, and C
1
, C
2
are constants. However,
J
n
(x) = (1)
n
J
n
(x).
Hence, J
n
(x) and J
n
(x) are linearly dependent, so they do not form a
basis of solutions.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 71
Proof:
Replace with n in the expression for J
(x)
J
n
(x) = x
n
m=0
(1)
m
x
2m
2
2mn
m! (mn + 1)
.
Note that 1/ = 0 for m n (the gamma function becomes innite for the
rst n terms). Consequently, the summation begins with m = n
J
n
(x) =
m=n
(1)
m
x
2mn
2
2mn
m! (mn)!
=
s=0
(1)
n+s
x
2s+n
2
2s+n
(n +s)! s!
= (1)
n
x
n
s=0
(1)
s
x
2s
2
2s+n
s! (n + s)
= (1)
n
J
n
(x).
4.12 Gamma Function
The gamma function is dened as follows:
(a) =
_
0
e
t
t
a1
dt.
The gamma function is graphically illustrated in Figure 2. Note that 1/(x)
is a continuous function, which makes it easier to work with. Some impor-
tant properties of the gamma function are:
(a + 1) = a(a)
(1) = 1,
(2) = (1) = 1!, =(k + 1) = k! (k = 0, 1, ),
(3) = 2(2) = 2!,
1
(0)
= 0,
(1/2) =
,
(x) (1 x) =
sinx
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 72
-5
-4
-3
-2
-1
0
1
2
3
4
5
-4 -3 -2 -1 0 1 2 3 4
(x)
(x)
1
(
x
)
,
(
x
)
1
x
Figure 4.2: Plot of (x) and (x)
1
as a function of x.
4.13 Bessel Functions of the Second Kind
The second solution to Bessels equation is dened dierently, depending on
whether the order is an integer. To provide uniformity of formalism and
numerical tabulation, it is desirable to adopt a form of the second solution
that is valid for all values of the order.
When n = 0, Bessels equation can be written as
x
d
2
y
dx
2
+
dy
dx
+ xy = 0.
Following the procedure outlined for the solution of Bessels equation, the
indicial equation resulting from the x
r
terms is given by
r
2
a
0
= 0,
=r
2
= 0 r
1
= r
2
= 0, double root.
Therefore, according to the Frobenius method a solution is of the form
y
2
(x) = J
0
(x) lnx +
m=1
A
m
x
m
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 73
y
2
= J
0
lnx +
J
0
x
+
m=1
mA
m
x
m1
,
y
2
= J
0
lnx +
2J
0
x
J
0
x
2
+
m=1
m(m1)A
m
x
m2
.
Substituting into the governing dierential equation yields
xJ
0
lnx + 2J
J
0
x
+
m=1
m(m1)A
m
x
m1
+J
0
lnx +
J
0
x
+
+
m=1
mA
m
x
m1
+ xJ
0
lnx +
m=1
A
m
x
m+1
= 0.
It should be noted that J
0
is a solution to Bessels equation. Consequently,
[xJ
0
+ J
0
+xJ
0
]
. .
0
lnx = 0.
=2J
0
+
m=1
m(m1)A
m
x
m1
+
m=1
mA
m
x
m1
+
m=1
A
m
x
m+1
= 0
=2J
0
+
m=1
m
2
A
m
x
m1
+
m=1
A
m
x
m+1
= 0.
Recall that
J
0
(x) =
m=0
(1)
m
x
2m
2
2m
(m!)
2
, J
0
(x) =
m=1
(1)
m
x
2m1
2
2m1
m! (m1)!
.
=
m=1
(1)
m
x
2m1
2
2m2
m! (m1)!
+
m=1
m
2
A
m
x
m1
+
m=1
A
m
x
m+1
= 0.
x
0
terms: (2nd sum with m = 1)
A
1
x
0
= 0 A
1
= 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 74
x
2
terms: (2nd sum with m = 3 + 3rd sum with m = 1)
[9A
3
+ A
1
]x
2
= 0,
=A
3
= 0.
A
1
= 0,
Similarly, we can show that
A
5
= A
7
= = 0.
x terms: (1st sum with m = 1 + 2nd sum with m = 2)
[1 + 4A
2
]x = 0 =A
2
=
1
4
.
x
3
terms: (1st sum with m = 2 + 2nd with m = 4 + 3rd with m = 2)
_
1
8
+ 16A
4
+ A
2
_
x
3
= 0,
A
2
=
1
4
, =A
4
=
3
128
.
In general
A
2m
=
(1)
m1
2
2m
(m!)
2
_
1 +
1
2
+
1
3
+ +
1
m
_
. .
h
m
, (m = 1, 2, 3, ).
=y
2
(x) = J
0
(x) lnx +
m=1
(1)
m1
h
m
x
2m
2
2m
(m!)
2
.
Note that y
1
= J
0
and y
2
are linearly independent, consequently
y
1
= J
0
, and y
2
= a(y
2
+ bJ
0
) a = 0,
are also linearly independent. Customarily we choose
a =
2
, b = ln2,
where
= 0.577215 Euler constant.
We dene the Bessel Function of the Second Kind and Order Zero as follows
Y
0
(x) =
2
_
J
0
(x)
_
ln
x
2
+
_
+
m=1
(1)
m1
h
m
x
2m
2
2m
(m!)
2
_
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 75
Similarly, we can obtain a second solution for = n = 1, 2,
Y
n
(x) =
2
_
ln
_
x
2
_
+
_
J
n
(x) +
x
n
m=0
(1)
m1
[h
m
+ h
m+n
] x
2m
2
2m+n
m! (m + n)!
x
n
n1
m=0
(n m1)! x
2m
2
2mn
m!
.
Therefore, the general complete solution for the case where = n is given
by
y(x) = C
1
J
n
(x) +C
2
Y
n
(x).
A couple of useful relationships of Bessel functions of the second kind are:
Y
n
(x) = lim
n
Y
(x),
Y
(x) =
J
(x) cos J
(x)
sin
.
4.14 Modied Bessel Functions
The following secondorder dierential equation is known as the modied
Bessels equation
x
2
d
2
y
dx
2
+ x
dy
dx
_
x
2
+
2
_
y = 0.
The general solution of this dierential equation is
y = c
1
J
(ix) +c
2
J
(ix), 0, real,
y = c
1
J
n
(ix) +c
2
Y
n
(ix) n = 0, 1, 2,
Given the following relationships
I
(x) = i
(ix) =
m=0
_
x
2
_
2m+
m! (m + n)!
,
I
n
(x) = I
n
(x),
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 76
it is clear that the two solutions are dependent. Therefore, we introduce
the following relationships
K
(x) =
2
I
(x) I
(x)
2 sin
,
K
n
(x) =
2
i
n+1
[J
n
(ix) +iY
n
(ix)].
The solution to modied Bessels equation can be expressed as follows:
y = c
1
I
(x) +c
2
I
(x),
y = c
1
I
n
(x) +c
2
K
n
(x),
where I
is the modied Bessel function of the rst kind of order ;
I
n
is the modied Bessel function of the rst kind of order n;
K
n
is the modied Bessel function of the second kind of order n.
4.15 Useful Formulas
4.15.1 Recurrence Relationships Involving J
(x)
Valid for all values of as well as when replacing J
(x) for Y
(x).
(1) J
2
(x) =
2
x
J
1
(x) J
0
(x)
(2) J
0
(x) = J
1
(x)
(3) J
+1
(x) =
2
x
J
(x) J
1
(x)
(4) J
(x) =
1
2
[J
1
(x) J
+1
(x)]
(5) xJ
(x) = J
(x) xJ
+1
(x)
(6) xJ
(x) = xJ
1
(x) J
(x)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 77
(7)
d
dx
[x
(x)] = x
J
1
(x)
(8)
d
dx
_
x
(x)
= x
J
+1
(x)
(9)
_
1
x
d
dx
_
m
[x
(x)] = x
m
J
m
(x)
(10)
_
1
x
d
dx
_
m
_
x
(x)
= (1)
m
x
m
J
+m
(x)
(11) J
n
(x) = (1)
n
J
n
(x)
(12)
d
dx
[x
n
J
n
(x)] = x
n
J
n1
(x)
4.15.2 Recurrence Relationships Involving I
(x)
(1) xI
1
(x) xI
+1
(x) = 2I
(x)
(2) I
1
(x) +I
+1
(x) = 2I
(x)
(3) xI
(x) +I
(x) = xI
1
(x)
(4) xI
(x) I
(x) = xI
+1
(x)
(5)
_
1
x
d
dx
_
m
[x
(x)] = x
m
I
m
(x)
(6)
_
1
x
d
dx
_
m
_
x
(x)
= x
m
I
+m
(x)
(7) I
n
(x) = I
n
(x)
(8) I
2
(x) =
2
x
I
1
(x) +I
0
(x)
(9) I
0
(x) = I
1
(x)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 78
4.15.3 Recurrence Relationships Involving K
(x)
(1) xK
n1
(x) xK
n+1
(x) = 2nK
n
(x)
(2) K
n1
(x) +K
n+1
(x) = 2K
n
(x)
(3) xK
n
(x) +nK
n
(x) = xK
n1
(x)
(4) xK
(x) nK
n
(x) = xK
n+1
(x)
(5)
_
1
x
d
dx
_
m
[x
n
K
n
(x)] = (1)
m
x
nm
K
nm
(x)
(6)
_
1
x
d
dx
_
m
_
x
n
K
n
(x)
= (1)
m
x
nm
K
n+m
(x)
(7) K
(x) = K
(x)
(8) K
2
(x) =
2
x
K
1
(x) +K
0
(x)
(9) K
0
(x) = K
1
(x)
(10) K
n
(x) = K
n
(x)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 79
4.15.4 Integral Representations of J
n
(x), I
n
(x) and K
n
(x)
(1) J
0
(x) =
2
_
/2
0
cos(x cos ) d
(2) J
1
(x) =
2
_
/2
0
sin(x cos ) cos d
(3) J
n
(x) =
1
_
0
cos(x sin n) d
(4) J
n
(x) =
1
_
0
cos(x sin) cos n d (n = 0, 2, 4, . . .)
(5) J
n
(x) =
1
_
0
sin(x sin) sinn d (n = 1, 3, 5, . . .)
(6) J
n
(x) =
2
(n +
1
2
)
_
x
2
_
n
_
/2
0
cos(x sin) (cos )
2n
d
(7) J
n
(x) =
2
(n +
1
2
)
_
x
2
_
n
_
/2
0
cos(x sin) (sin)
2n
d
(8) I
n
(x) =
2
(n +
1
2
)
_
x
2
_
n
_
/2
0
cosh(x sin) (cos )
2n
d
(9) I
n
(x) =
2
(n +
1
2
)
_
x
2
_
n
_
/2
0
cosh(x sin) (sin)
2n
d
(10) K
n
(x) = e
x
_
2x
_1
2 1
(n +
1
2
)
_
0
e
u
u
n
1
2
_
1 +
u
2x
_
n
1
2
du
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 80
4.15.5 Indenite Integrals of Bessel Functions
Also applicable when replacing J
(x) for Y
(x).
(1)
_
xJ
0
(ax) dx =
x
a
J
1
(ax)
(2)
_
x
2
J
0
(ax) dx =
x
2
a
J
1
(ax) +
x
a
2
J
0
(ax)
1
a
2
_
J
0
(ax) dx
(3)
_
J
0
(ax)
x
2
dx = aJ
1
(ax)
J
0
(ax)
x
a
2
_
J
0
(ax) dx
(4)
_
J
1
(ax) dx =
1
a
J
0
(ax)
(5)
_
xJ
1
(ax) dx =
x
a
J
0
(ax) +
1
a
_
J
0
(ax) dx
(6)
_
J
1
(ax)
x
dx = J
1
(ax) +a
_
J
0
(ax) dx
(7)
_
xJ
n
(ax)J
n
(bx) dx =
x[aJ
n
(bx)J
n
(ax) bJ
n
(ax)J
n
(bx)]
b
2
a
2
(a = b)
(8)
_
xJ
2
n
(ax) dx =
x
2
2
[J
n
(ax)]
2
+
x
2
2
_
1
n
2
a
2
x
2
_
[J
n
(ax)]
2
(9)
_
x
n
J
n1
(ax) dx =
x
n
a
J
n
(ax)
(10)
_
x
n
J
n+1
(ax) dx =
x
n
a
J
n
(ax)
(11)
_
x
n
I
n1
(ax) dx =
x
n
a
I
n
(ax)
(12)
_
x
n
I
n+1
(ax) dx =
x
n
a
I
n
(ax)
(13)
_
x
n
K
n1
(ax) dx =
x
n
a
K
n
(ax)
(14)
_
x
n
K
n+1
(ax) dx =
x
n
a
K
n
(ax)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 81
4.15.6 Denite Integrals Involving Bessel Functions
(1)
_
a
0
J
1
(x) dx = 1 J
0
(a) (a > 0)
(2)
_
a
J
1
(x) dx = J
0
(a) (a > 0)
(3)
_
0
J
n
(ax) dx =
1
a
(n > 1, a > 0)
(4)
_
0
J
n
(ax)
x
dx =
1
n
(n = 1, 2, . . .)
(5)
_
1
0
xJ
n
(ax)J
n
(bx) dx =
_
_
0, a = b,
a = b,
1
2
[J
n+1
(a)]
2
, J
n
(a) = 0,
J
n
(b) = 0.
(n > 1)
(6)
_
0
e
ax
J
0
(bx) dx =
1
a
2
+ b
2
(7)
_
0
e
ax
J
n
(bx) dx =
1
a
2
+ b
2
_
_
(a
2
+ b
2
) a
b
_
n
(a > 0, n 0)
(8)
_
0
J
n
(ax) sin(bx) dx =
_
_
sin[nsin
1
(b/a)]
a
2
b
2
, 0 < b < a,
a
n
cos(n/2)
b
2
a
2
(b+
b
2
a
2
)
n , 0 < a < b,
(n > 2)
(9)
_
0
J
n
(ax) cos(bx) dx =
_
_
cos[ncos
1
(b/a)]
a
2
b
2
, 0 < b < a,
a
n
sin(n/2)
b
2
a
2
(b+
b
2
a
2
)
n , 0 < a < b,
(n > 2)
(10)
_
0
J
m
(x)J
n
(x)
x
dx =
_
_
_
2
(m
2
n
2
)
sin
(mn)
2
, m = n,
1
2m
, m = n,
(m+n > 0)
(11)
_
0
J
0
(ax)J
1
(bx) dx =
_
_
_
1/b, b
2
> a
2
,
0, b
2
< a
2
,
(12)
_
0
J
0
(ax)J
1
(ax) dx =
1
2a
(a > 0)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 82
-0.5
0
0.5
1
J
n
(x)
0 2.5 5 7.5 10
x
J
0
J
1
( a )
-0.5
-0.3
-0.1
0.1
0.3
0.5
Y
n
(x)
0 2.5 5 7.5 10
x
Y
0
Y
1
( b )
0
20
40
60
80
100
0 1 2 3 4 5
x
I
0
100K
0
( c )
K
n
(
x
)
,
I
n
(
x
)
4.16 Summary of Bessels Equations
Bessel Function Modied Bessel Function
x
2
y
+ xy
+
_
x
2
2
_
y = 0 x
2
y
+ xy
_
x
2
+
2
_
y = 0
y = C
1
J
(x) +C
2
J
(x) y = C
1
I
(x) +C
2
I
(x) Real
y = C
1
J
n
(x) +C
2
Y
n
(x) y = C
1
I
n
(x) +C
2
K
n
(x) Integer
Figure 4.3: Plot of (a) J
0
, J
1
, (b) Y
0
, Y
1
, and (c) K
0
, I
0
as a function of x.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 83
Example 1
There are various dierential equations which can be reduced to Bessels
equation. For example consider the following dierential equation
x
d
2
y
dx
2
+
dy
dx
+
1
4
y = 0.
Make the substitution
x = z x = z
2
,
dz
dx
=
1
2
x
1
2
,
dy
dx
=
dy
dz
dz
dx
=
dy
dz
_
1
2
x
1
2
_
,
d
2
y
dx
2
=
d
dx
_
dy
dx
_
=
d
dx
_
dy
dz
_
1
2
x
1
2
__
=
dy
dz
_
1
4
x
3
2
_
+
_
1
2
x
1
2
_
d
dz
_
dy
dz
__
dz
dx
_
=
dy
dz
_
1
4
x
3
2
_
+
d
2
y
dz
2
_
1
2
x
1
2
_
2
=
dy
dz
_
1
4
x
3
2
_
+
d
2
y
dz
2
_
1
4x
_
.
Substituting into the original equation yields
z
2
_
dy
dz
_
1
4
x
3
2
_
+
d
2
y
dz
2
_
1
4x
__
+
dy
dz
_
1
2
x
1
2
_
+
y
4
= 0
=
1
4
d
2
y
dz
2
1
4z
dy
dz
+
1
2z
dy
dz
+
y
4
= 0
=
d
2
y
dz
2
+
1
z
dy
dz
+ y = 0
=z
2
d
2
y
dz
2
+ z
dy
dz
+
_
z
2
0
_
y = 0, Bessel
s Equation.
Therefore, the solution to the transformed dierential equation is
y(z) = AJ
0
(z) +BY
0
(z).
Backsubstitution of the original variables z =
x yields
=y(x) = AJ
0
_
x
_
+ BY
0
_
x
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 84
Example 2
Prove that
y =
xJ1
4
_
kx
2
2
_
and y =
xY1
4
_
kx
2
2
_
are solutions of the following secondorder ordinary dierential equation
d
2
y
dx
2
+ k
2
x
2
y = 0. ()
Let
z =
kx
2
2
=
dz
dx
= kx,
dy
dx
=
dy
dz
dz
dx
= kx
dy
dz
,
d
2
y
dx
2
=
d
dx
dy
dx
=
d
dx
_
kx
dy
dz
_
= k
dy
dz
+ kx
d
dz
_
dy
dz
_
dz
dx
= k
dy
dz
+ (kx)
2
d
2
y
dz
2
.
Substituting into the dierential equation (*) yields
k
dy
dz
+ (kx)
2
d
2
y
dz
2
+ 2kzy = 0
=kx
2
d
2
y
dz
2
+
dy
dz
+ 2zy = 0
=2z
d
2
y
dz
2
+
dy
dz
+ 2zy = 0
=z
2
d
2
y
dz
2
+
z
2
dy
dz
+ z
2
y = 0. ()
The preceding is a dierential equation with a new independent variable.
At this stage let
y = uz
1
4
,
y
= u
z
1
4
+
1
4
uz
3
4
,
y
= u
z
1
4
+
1
4
u
3
4
+
1
4
u
3
4
3
16
uz
7
4
= u
z
1
4
+
1
2
u
3
4
3
16
uz
7
4
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 85
Substituting into into (**) yields
z
2
_
d
2
u
dz
2
z
1
4
+
1
2
du
dz
z
3
4
3
16
uz
7
4
_
+
z
2
_
du
dz
z
1
4
+
1
4
uz
3
4
_
+ z
2
_
uz
1
4
_
= 0
=z
9
4
d
2
u
dz
2
+ z
5
4
du
dz
+
_
z
9
4
z
1
4
16
_
u = 0, divide by z
1
4
=z
2
d
2
u
dz
2
+ z
du
dz
+
_
z
2
1
16
_
u = 0, Bessel
s equation with =
1
4
.
The solution to the preceding Bessels equation can be presented either in
terms of J1
4
and J
1
4
or more generally in terms of J1
4
and Y1
4
u(z) = AJ1
4
(z) +BY1
4
(z), u =
y
z
1
4
=y(z) = Az
1
4
J1
4
(z) +Bz
1
4
Y1
4
(z), z =
kx
2
2
=y(x) = A
_
kx
2
2
_
1
4
J1
4
_
kx
2
2
_
+ B
_
kx
2
2
_
1
4
Y1
4
_
kx
2
2
_
= A
x J1
4
_
kx
2
2
_
+ B
x Y1
4
_
kx
2
2
_
,
where
A
= A
_
k
2
_1
4
, B
= B
_
k
2
_1
4
.
It should be noted that because 1/4 is not an integer we can also have a
solution of the form:
y(x) = A
x J1
4
_
kx
2
2
_
+ B
x J
1
4
_
kx
2
2
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 86
Example 3
Obtain the general solution of the following secondorder ordinary dier-
ential equation
d
2
y
dx
2
+
1
x
dy
dx
y
4y
x
2
= 0.
Rearranging yields
d
2
y
dx
2
+
1
x
dy
dx
_
1 +
4
x
2
_
y = 0
= x
2
d
2
y
dx
2
+ x
dy
dx
_
x
2
+ 4
_
y = 0.
This is the modied Bessels equation with = 2 with a general solution
of the form
y(x) = A I
2
[x] +B K
2
[x]
Examples: Gamma Functions
Evaluate the following:
(a)
_
0
e
x
x dx.
Recall the denition of the gamma function
(a) =
_
0
e
t
t
a1
dt,
and let a 1 =
1
2
a =
3
2
in order to obtain the following relationship
=
_
0
e
x
x
3
2
1
dx =
_
3
2
_
(n + 1) = n(n)
=
_
3
2
_
=
_
1
2
+ 1
_
=
1
2
_
1
2
_
_
1
2
_
=
=
_
0
e
x
x dx =
2
(b)
_
5
2
_
=
_
3
2
+ 1
_
=
3
2
_
3
2
_
=
3
2
_
2
_
=
3
4
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 87
(c) (2.5) (n + 1) = n(n) =(n) =
(n + 1)
n
=(2.5) =
(1.5)
(2.5)
=
(0.5)
(2.5)(1.5)
=
(0.5)
(2.5)(1.5)(0.5)
=
1.875
4.17 Orthogonal Sets of Functions
Two functions g
m
(x) and g
n
(x) are said to be orthogonal on the interval
(a, b) if the integral of the product g
m
(x)g
n
(x) over that interval vanishes
(g
m
, g
n
) =
_
b
a
g
m
(x)g
n
(x) dx = 0, Orthogonal.
The nonnegative square root of (g
m
, g
m
) is called the norm of g
m
||g
m
|| =
_
(g
m
, g
m
) =
_
b
a
g
2
m
(x) dx.
Two functions g
m
(x) and g
n
(x) are said to be orthonormal if
(g
m
, g
n
) =
_
b
a
g
m
(x)g
n
(x) dx =
_
0 m = n,
1 m = n,
or equivalently we may write
(g
m
, g
n
) =
mn
, Kronecker Delta,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 88
where
mn
=
_
0 m = n,
1 m = n.
From an orthogonal set we may obtain an orthonormal set by dividing each
function by its norm.
Orthogonality with Respect to a Weight Function
Two functions g
m
(x) and g
n
(x) are said to be orthogonal with respect to a
weighting function p(x) on the interval (a, b) if
_
b
a
p(x)g
m
(x)g
n
(x) dx = 0, n = m.
The norm of g
m
is now dened as
||g
m
|| =
_
b
a
p(x) g
2
m
(x) dx.
If the norm of each function g
m
is 1, the set is said to be orthonormal on
that interval with respect to p(x).
Example
Show that the following set is orthogonal on the interval 0 x 2 and
determine the corresponding orthonormal set
1, cos x, cos 2x, cos 3x, , 0 x 2.
The general term is cos nx (n = 0, 1, 2, 3, )
(g
m
, g
n
) =
_
2
0
cos mx cos nx dx = 0,
and recall cos xcos y =
1
2
[cos(x + y) + cos(x y)],
=(g
m
, g
n
) =
1
2
_
2
0
cos(m + n)x dx +
1
2
_
2
0
cos(mn)x dx
=
sin(m + n)x
2(m + n)
2
0
+
sin(mn)x
2(mn)
2
0
= 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 89
Therefore, the set
cos nx, n = 0, 1, 2, 3, is orthogonal
To obtain the norm of each function evaluate
||g
0
||
2
= (g
0
, g
0
) =
_
2
0
(1 1) dx = x
2
0
= 2,
=||g
0
|| =
2,
||g
m
|| =
_
(g
m
, g
m
), m = 1, 2, 3,
(g
m
, g
m
) =
_
2
0
cos
2
mx dx
=
1
2
_
2
0
(1 + cos 2mx) dx
=
1
2
_
x +
sin2mx
2m
_
2
0
= ,
=||g
m
|| =
.
The corresponding orthonormal set is:
1
2
,
cos x
,
cos 2x
,
cos 3x
,
4.18 SturmLiouville Problem
A boundaryvalue problem having the form
d
dx
_
r(x)
dy
dx
_
+ [q(x) +p(x)]y = 0, a x b,
replace if r(a) = r(b)
k
1
y(a) +k
2
y
(a) = 0, remove if r(a) = 0 y(a) = y(b)
1
y(b) +
2
y
(b) = 0, remove if r(b) = 0 y
(a) = y
(b)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 90
where k
1
, k
2
,
1
,
2
are given constants; r(x), q(x), p(x) are given functions
which we shall assume to be dierentiable; and is an unspecied param-
eter independent of x, is called a SturmLiouville boundaryvalue problem
or SturmLiouville system.
A nontrivial solution of this system (one which is not identically zero,
y = 0) exists in general only for a particular set of values of the parameter
. These values are called the characteristic values, or more often eigen-
values of the system. The corresponding solutions are called characteristic
functions or eigenfunctions of the system.
Orthogonality of Eigenfunctions
If y
m
(x) and y
n
(x) are eigenfunctions of a SturmLiouville problem, which
correspond to dierent eigenvalues
m
and
n
, then y
m
, y
n
are orthogonal
on that interval with respect to the weight factor p(x); consequently,
_
b
a
p(x) y
m
y
n
dx = 0.
If p(x) is positive in the interval a x b, the
n
s are real.
Example 1
Find the eigenvalues and eigenfunctions of the following SturmLiouville
problem
d
2
y
dx
2
+ y = 0, y(0) = 0, y() = 0.
The characteristic equation of the secondorder ordinary dierential equa-
tion is
r
2
+ = 0 = r = i
=y(x) = Acos
x + Bsin
x.
bc1 : y(0) = A + 0 = 0 = A = 0,
y() = 0 = Acos
+ Bsin
bc2 :
=Bsin
= 0, B = 0 because A = 0
=sin
= 0
=
= n, (n = 0, 1, 2, )
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 91
=
n
= n
2
, (n = 1, 2, 3, ) Eigenvalues
Note that the eigenvalue = 0 is excluded because for = 0 the solution
is y(x) = Bsin(0) = 0. Consequently, the eigenfunctions are given by
y(x) = Bsinnx, (n = 1, 2, 3, ) Eigenfunctions
Also, we may let B = 1.
Example 2
Find the eigenvalues and eigenfunctions of the following SturmLiouvile
problem
d
2
y
dx
2
+ y = 0, y(0) = 0,
dy(L)
dx
= 0.
The characteristic equation of the secondorder ordinary dierential equa-
tion is
r
2
+ = 0 = r = i
=y(x) = Acos
x + Bsin
x
bc1 : y(0) = A + 0 = 0 = A = 0,
bc2 :
dy
dx
=
Asin
x +
Bcos
x
=
dy(L)
dx
= 0 =
Bcos
L
=cos
L = 0
=
L =
_
2n + 1
2
_
, (n = 0, 1, 2, )
=
n
=
_
(2n + 1)
2L
_
2
, (n = 0, 1, 2, ) Eigenvalues
=y
n
(x) = Bsin
_
(2n + 1)x
2L
_
Eigenfunctions
Also, we may let B = 1.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 92
4.19 Important Orthogonal Functions and Polynomials
4.19.1 Bessel Functions
Recall Bessels equation and the corresponding general solution
x
2
d
2
y
dx
2
+x
dy
dx
+
_
x
2
2
_
y = 0, (0 x R),
y = AJ
(x) +BY
(x).
The following dierential equation
x
2
d
2
dx
2
J
[x] +x
d
dx
J
[x] +
_
x
2
2
_
J
[x] = 0 ()
is satised because J
is a solution to Bessels equation. Furthermore, let
x = s =
ds
dx
=
1
,
dJ[x]
dx
=
dJ[x]
ds
ds
dx
=
1
dJ[s]
ds
,
d
2
J[x]
dx
2
=
d
dx
_
dJ[x]
dx
_
=
d
dx
_
1
dJ[s]
ds
_
=
d
ds
_
1
dJ[s]
ds
_
ds
dx
=
1
2
d
2
J[s]
ds
2
.
Substituting into (*) yields
=s
2
d
2
ds
2
J
[s] +s
d
ds
J
[s] +
_
2
s
2
2
_
J
[s] = 0,
divide by s
=
d
ds
_
s
dJ
[s]
ds
_
+
_
2
s
+
2
s
_
J
[s] = 0, (0 s R
). ()
This is a SturmLiouville problem with
2
instead of , and
r(s) = s, q(s) =
2
s
, p(s) = s.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 93
Note that r(0) = 0, then the rst boundary condition of the SturmLiouville
problem is dropped and we only have to satisfy the second condition,
namely
1
J
[R
] +
2
J
[R
] = 0,
or just the relationship
J
[R
] = 0. ( )
Let
R
= a
mn
= =
mn
=
a
mn
R
.
Then, the solutions of (**) which satisfy (***) form an orthogonal set on
that interval with respect to the weight function p(s) = s; consequently,
_
R
0
s J
[
mn
s] J
[
kn
s] ds = 0, k = m.
4.19.2 Legendre Polynomials
Recall Legendres equation
_
1 x
2
_
d
2
y
dx
2
2x
dy
dx
+ n(n + 1)y = 0, (1 x 1),
and let = n(n + 1) to obtain the following ordinary dierential equation
d
dx
_
_
1 x
2
_
dy
dx
_
+ y = 0.
This is a SturmLiouville problem with
r(x) =
_
1 x
2
_
, q(x) = 0, p(x) = 1.
Note that r(a) = r(1) = 0 and r(b) = r(1) = 0; therefore, no bound-
ary conditions are needed to form a SturmLiouville problem. We know
that, for n = 0, 1, , the Legendre polynomials P
n
(x) are solutions of the
problem. Hence, these are eigenfunctions and they are orthogonal on that
interval with respect to p(x) = 1; consequently,
_
1
1
P
m
(x) P
n
(x) dx = 0, m = n.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 94
4.20 Exercises
(1) Determine the interval of convergence for each of the following series,
including consideration of the behavior of the series at each end point
(a)
n=1
(1)
n
(x 2)
n
(4
n
)
n
,
(b)
n=0
2
n
x
n
n!
.
(2) For each of the following dierential equations, obtain the most general
solution which is representable by a Maclaurin series (Apply the power
series method: y =
k=0
a
k
x
k
)
(a) x
2
d
2
y
dx
2
dy
dx
+ y = 0,
(b) x
2
d
2
y
dx
2
dy
dx
= 0,
(c)
dy
dx
+ x
dy
dx
= y.
(3) Show the relation between m, p, and s
m=2
m(m1)a
m
x
m2
=
p=1
p(p+1)a
p+1
x
p1
=
s=0
(s+2)(s+1)a
s+2
x
s
.
(4) Use the method of Frobenius to obtain the general solution of the fol-
lowing dierential equation, valid near x = 0:
x
d
2
y
dx
2
+ 2
dy
dx
+ xy = 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 95
(5) Find P
6
(x).
(6) Obtain the associated Legendre functions
(a) P
1
2
(x),
(b) P
2
3
(x),
(c) P
3
2
(x).
(7) By making an appropriate change of variables, obtain the general solu-
tion of the dierential equation
(Ax + B)
d
2
y
dx
2
+ A
dy
dx
+ A
2
(Ax + B)y = 0.
(8) Using the series denition
J
n
[x] =
m=0
(1)
m
_
x
2
_
2m+n
m! (n + m)!
prove that
d
dx
_
x
n
J
n
[ax]
_
= ax
n
J
n+1
[ax].
(9) Prove that
y
1
=
x J
1/4
_
x
2
2
_
and y
2
=
x Y
1/4
_
x
2
2
_
are solutions of
d
2
y
dx
2
+ x
2
y = 0.
Hint: let z =
1
2
x
2
and then y = uz
1
4
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 96
(10) Find the eigenvalues and the eigenfunctions of the following Sturm
Liouville problems:
(a)
d
dx
_
x
dy
dx
_
+
x
y = 0, y(1) = 0,
dy(e)
dx
= 0,
_
let x = e
t
_
.
(b)
d
2
y
dx
2
+ y = 0, y(0) = y(),
dy(0)
dx
=
dy()
dx
.
(11) Show that the following set is orthogonal on the interval 1 x
1, and determine the corresponding orthonormal set; sinx, sin2x,
sin3x, . . .
(12) Prove that
1
_
1
P
m
(x) P
n
(x) dx = 0, if m = n.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 97
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 98
Chapter 5
Laplace Transform
5.1 Introduction
The Laplace transform is a method for solving dierential equations and
corresponding initial value and boundary problems.
Laplace transform reduces an ordinary dierential equation to an alge-
braic equation.
It solves problems directly
Initial value problems are solved without rst determining a general so-
lution.
Nonhomogeneous equations are solved without rst solving the corre-
sponding homogeneous equation.
PDE = ODE = Algebraic
5.2 Characteristics of Problems Suited for Laplace Tranform
(a) The dierential equation is linear (necessary).
(b) The equation has constant coecients (highly desirable).
(c) At least one independent variable has the range 0 to (highly desirable).
(d) There are appropriate initial conditions involving the independent vari-
able in (c) above (desirable).
5.3 Denition of the Laplace Transform
Let f(t) be a function of t specied for t > 0. Then, the Laplace transform
of f(t), denoted by L{f(t)}, is dened by
L{f(t)} = F(s) =
_
0
e
st
f(t) dt,
where we assume at present that the parameter s is real and large enough
(sometimes it is useful to consider s complex).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 99
Notation
Original functions: lowercase letters (i.e., f(t), g(t), y(t)). Their transforms:
same letters in capitals (i.e., F(s), G(s), Y (s)).
t s,
(real space) (Laplace space).
In other cases, a tilde can be used to denote the Laplace transform. Thus,
for example, the Laplace transform of u(t) is u(s). It should be noted,
however, that some authors use opposite notation: F(t) f(s).
Examples
L{1} =
_
0
e
st
(1) dt =
e
st
s
0
=
1
s
(a)
L{a} =
a
s
, a is a constant
L{t} =
_
0
e
st
t dt =
e
st
t
s
0
+
1
s
_
0
e
st
dt (b)
= 0
e
st
s
2
0
=
1
s
2
_
_
Integration by Parts :
_
u dv = uv
_
v du,
u = t, du = dt, dv = e
st
dt, v =
e
st
s
.
_
_
L{at} =
a
s
2
L{t
n
} =
_
0
e
st
t
n
dt (n = 0, 1, 2, 3, ) (c)
=
_
t
n
_
e
st
s
__
0
+
_
0
n
s
e
st
t
n1
dt
_
_
Integration by Parts :
_
u dv = uv
_
v du,
u = t
n
, du = nt
n1
dt, dv = e
st
dt, v =
e
st
s
.
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 100
y
t
y = t
n
t
y y = e
-st
y = t
n
e
-st
y
t
Figure 5.1: An illustration of a function for which a Laplace transform
exists.
We assume that s is large enough that e
st
diminishes more quickly than
t
n
can increase, so that as t , t
n
e
st
0 (see Figure 5.1).
= L{t
n
} =
n
s
_
0
e
st
t
n1
dt.
Note that A
n1
=
_
0
e
st
t
n1
dt is the same as
A
n
=
_
0
e
st
t
n
dt except that n n 1
A
n
=
n
s
A
n1
=
n
s
_
n 1
s
_
A
n2
=
n
s
_
n 1
s
__
n 2
s
_
A
n3
=
n
s
_
n 1
s
__
n 2
s
_
n (n 1)
s
A
0
=
n(n 1)(n 2) 3 2 1
s
n+1
=
n!
s
n+1
,
because A
0
=
_
0
e
st
(1) dt =
1
s
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 101
= L{t
n
} =
n!
s
n+1
This is not the easiest approach but shows some aspects of s which lead to
the existence of Laplace transforms.
Another Way of Obtaining the Previous Laplace Transform:
L{t
a
} =
_
0
e
st
t
a
dt, let x = st dt =
dx
s
=L{t
a
} =
_
0
e
x
_
x
s
_
a
dx
s
=
1
s
a+1
_
0
e
x
x
a
dx
L{t
a
} =
(a + 1)
s
a+1
, a = real
L{t
n
} =
n!
s
n+1
a = n = integer
_
_
() =
_
0
e
z
z
1
dz, Gamma function,
(n + 1) = n!
_
_
So we can form a table of Laplace transforms.
5.4 References to Tables of Laplace Transforms
Day, W. D., Tables of Laplace Transforms, London Ilie Books LTD, Eng-
land, 1966.
Erdelyi, A. (Editor), Tables of Integral Transforms, Vol. I, McGrawHill,
1954.
Nixon, F. E., Handbook of Laplace Transformation, Prentice Hall, 1960.
Oberhettinger, F. and L. Badii, Tables of Laplace Transforms, Springer
Verlag, New York, 428pp., 1973.
Roberts, G.E. and H. Kaufman, Table of Laplace transforms, W. B. Saun-
ders Co., Philadelphia, 367pp., 1966.
Sneddon, I. N., The Use of Integral Transform, McGrawHill, 1972.
Widder, D. V., An Introduction to Transform Theory, Academic Press,
1971.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 102
f(t)
a t
1
t
2
t
3
b
t
5.5 Existence of Laplace Transforms
Theorem: If f(t) is sectional or piecewise continuous in every nite interval
0 t N and of exponential order for t > N, then its Laplace transform
F(s) exists for all s > .
5.5.1 Piecewise Continuity
A function is called piecewise continuous in an interval t if the
interval can be subdivided into a nite number of intervals in each of which
the function is continuous and has nite right and left hand limits.
Figure 5.2: Illustration of a piecewise continuous function having discon-
tinuities at t
1
, t
2
and t
3
.
Note that in Figure 5.2 the right and left hand limits at t
2
, for example,
are represented by
lim
0
f(t
2
+ ) = f(t
2
+ 0) = f(t
2
+) (right hand limit),
lim
0
f(t
2
) = f(t
2
0) = f(t
2
) (left hand limit).
5.5.2 Functions of Exponential Order
If real constants M > 0 and exist such that for all t > N,
e
t
f(t)
< M or |f(t)| < Me
t
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 103
we say that f(t) is a function of exponential order as t or, briey,
is of exponential order.
Example 1
f(t) = t
2
is of exponential order (i.e., = 3), because |t
2
| = t
2
< e
3t
for all
t > 0 (let M = 1).
Example 2
f(t) = e
t
3
is not of exponential order because
e
t
e
t
3
e
t
3
t
< M can
be made larger than any given constant by increasing t.
5.6 Some Important Properties of Laplace Transforms
5.6.1 Linearity Property
The Laplace transformation is a linear operator
L{af(t) + bg(t)} = aL{f(t)} + bL{g(t)} = aF(s) + bG(s)
Example
L
_
4t
2
3 cos 2t + 5e
t
_
= 4L
_
t
2
_
3L{cos 2t} + 5L
_
e
t
_
= 4
_
2!
s
3
_
3
_
s
s
2
+ 2
2
_
+ 5
_
1
s (1)
_
=
8
s
3
3s
s
2
+ 4
+
5
s + 1
Where the appropriate Laplace transforms were obtained from Table 6.1 of
Kreyszig, 1993, p.265.
5.6.2 Laplace Transform of Derivatives
Assuming that the function f(t) is continuous and of exponential order,
and f
(n)
is sectionally continuous, then
L{f
(t)} = sF(s) f(0)
L{f
(t)} = s
2
F(s) sf(0) f
(0)
L{f
(n)
(t)} = s
n
F(s) s
n1
f(0) s
n2
f
(0) f
(n1)
(0)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 104
Example 1
L{f
(t)} = ? for f(t) = cos 3t
L{cos 3t} = F(s) =
s
s
2
+ 3
2
=
s
s
2
+ 9
(see Table 6.1 [Kreyszig, 1993])
L{f
(t)} = sF(s) f(0) = s
_
s
s
2
+ 9
_
cos(0)
=
s
2
s
2
+ 9
1 =
9
s
2
+ 9
Example 2
Another way of obtaining the transforms of given functions.
Let f(t) = e
at
f
(t) = ae
at
, f(0) = 1
L{f
(t)} = sF(s) f(0) = L
_
ae
at
_
= sL
_
e
at
_
1
= aL
_
e
at
_
= sL
_
e
at
_
1
= 1 = (s a)L
_
e
at
_
= L
_
e
at
_
=
1
s a
5.6.3 Laplace Transform of Integrals
L
__
t
0
f() d
_
=
1
s
L{f(t)} =
F(s)
s
Example
L
__
t
0
sin 2 d
_
=
1
s
L{f(t)} =
1
s
_
2
s
2
+ 2
2
_
=
2
s(s
2
+ 4)
5.6.4 First Translation or Shifting Property (Shifting on saxis)
L{e
at
f(t)} = F(s a) =
_
0
e
(sa)t
f(t) dt
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 105
a
F(s) F(s-a)
s
1
a
u(t-a)
1
u(t)
(t) (t)
Figure 5.3: Illustration of shifting on the s axis (here, a > 0).
Example 1
L
_
e
t
cos 2t
_
= F(s + 1) =
s + 1
(s + 1)
2
+ 4
=
s + 1
s
2
+ 2s + 5
_
Since F(s) = L{cos 2t} =
s
s
2
+ 4
_
Example 2
L
_
e
4t
t
_
= F(s a) = F(s + 4) =
1
(s + 4)
2
_
Since F(s) = L{t} =
1
s
2
_
5.6.5 Second Translation or Shifting Property (Shifting on taxis)
L{f(t a)u(t a)} = e
as
F(s),
where u(t a) =
_
0 t < a,
1 t > a.
is the Heaviside function.
Figure 5.4: Schematic representation of u(t a).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 106
Example 1
L
_
(t 2)
3
u(t 2)
_
= e
2s
_
6
s
4
_
_
_
_
Since F(s) = L
_
t
3
_
=
3!
s
4
=
6
s
4
,
a = 2.
_
_
_
Example 2
L{u(t 5)} = e
5s
_
1
s
_
_
_
f(t) = f(t 5) = 1,
F(s) = L{1} =
1
s
,
a = 5.
_
_
5.6.6 Change of Scale Property
L{f(at)} =
1
a
F
_
s
a
_
Example
L{sin nt} =
1
n
_
1
(
s
n
)
2
+ 1
_
=
n
s
2
+ n
2
_
_
_
F(s) = L{sin t} =
1
s
2
+ 1
,
a = n.
_
_
_
5.6.7 Division by t
Provided that the limit lim
t0
f(t)
t
exists
L
_
f(t)
t
_
=
_
s
F( s) d s
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 107
Example
L
_
sint
t
_
=
_
s
d s
s
2
+ 1
= tan
1
s
s
=
2
tan
1
s
=
2
_
2
tan
1
_
1
s
__
= tan
1
_
1
s
_
_
_
F(s) = L{sin t} =
1
s
2
+ 1
,
lim
t0
sin t
t
= 1,
tan
1
x =
2
tan
1
_
1
x
_
from CRC p.171.
_
_
5.6.8 Multiplication by t
n
L
_
t
n
f(t)
_
= (1)
n
d
n
ds
n
F(s) = (1)
n
F
(n)
(s)
Example
L{e
2t
} =
1
s 2
,
L{te
2t
} =
d
ds
_
1
s 2
_
=
1
(s 2)
2
L{t
2
e
2t
} =
d
2
ds
2
_
1
s 2
_
=
d
ds
_
1
(s 2)
2
_
=
2
(s 2)
3
5.6.9 Periodic Functions
Let f(t) have a period p > 0 so that f(t + p) = f(t) then
L{f(t)} =
1
1 e
ps
_
p
0
e
st
f(t) dt.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 108
f(t)
t
k
-k
a 2a 3a
Figure 5.5: Illustration of a periodic function with period p = 2a.
Example Obtain the Laplace transform of the function shown in Figure 5.5.
L{f(t)} =
1
1 e
2as
_
_
a
0
e
st
(k) dt +
_
2a
a
e
st
(k) dt
_
=
1
1 e
2as
_
k
s
e
st
a
0
+
k
s
e
st
2a
a
_
=
k/s
(1 e
as
)(1 + e
as
)
_
e
2as
2e
as
+ 1
. .
(1e
as
)
2
_
=
k
s
_
1 e
as
1 + e
as
_
5.6.10 Behavior of F(s) as s
If L{f(t)} = F(s),
then lim
s
F(s) = 0.
Final value : lim
s0
sF(s) = lim
t
f(t)
Initial value : lim
s
sF(s) = lim
t0
f(t)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 109
Example
f(t) = at
L{at} = F(s) =
a
s
2
= lim
s
F(s) = 0
5.7 Methods of Finding Laplace Transforms
(a) Direct method (use of denition)
(b) Series method: If f(t) has a power series expansion given by
f(t) = a
0
+ a
1
t + a
2
t
2
+ =
n=0
a
n
t
n
,
its Laplace transform can be obtained by taking the sum of the Laplace
transforms of each term in the series. Thus,
L{f(t)} =
a
0
s
+
a
1
s
2
+
2!a
2
s
3
+ =
n=0
n!a
n
s
n+1
.
(c) Use of tables
(d) Miscellaneous
5.8 The Inverse Laplace Transform
If the Laplace transform of f(t) is F(s) or
L{f(t)} = F(s),
then f(t) is the inverse Laplace transform of F(s) or
f(t) = L
1
{F(s)},
where L
1
is called the inverse Laplace transformation operator.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 110
Uniqueness of Inverse Laplace Transforms
Theorem: If we restrict ourselves to functions f(t) which are sectionally
continuous in every nite interval 0 t N and of exponential order, then
the inverse Laplace transform of F(s), i.e., L
1
{F(s)} = f(t) is unique.
5.9 Some Important Properties of Inverse Laplace Transforms
5.9.1 Linearity
L
1
{c
1
F
1
(s) + c
2
F
2
(s)} = c
1
L
1
{F
1
(s)} + c
2
L
1
{F
2
(s)}
= c
1
f
1
(t) + c
2
f
2
(t)
Example
L
1
_
4
s 2
3s
s
2
+ 16
+
5
s
2
+ 4
_
=
= 4L
1
_
1
s 2
_
3L
1
_
s
s
2
+ 16
_
+ 5L
1
_
1
s
2
+ 4
_
= 4e
2t
3 cos 4t +
5
2
sin 2t
_
Since L{sin at} =
a
s
2
+ a
2
_
5.9.2 First Translation or Shifting Property
If L
1
{F(s)} = f(t), then L
1
{F(s a)} = e
at
f(t).
Example
L
1
_
1
s
2
2s + 5
_
= L
1
_
1
(s 1)
2
+ 4
_
=
e
t
2
sin 2t
_
Since L
1
_
1
s
2
+ 4
_
=
1
2
sin 2t
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 111
5.9.3 Second Translation or Shifting Property
L
1
{e
as
F(s)} = f(t a) u(t a),
where u(t a) =
_
0 t < a,
1 t > a.
Example
L
1
_
e
s
3
s
2
+ 1
_
= sin
_
t
3
_
u
_
t
3
_
=
_
_
_
sin (t
3
) t >
3
,
0 t <
3
.
_
Since L
1
_
1
s
2
+ 1
_
= sin t
_
5.9.4 Change of Scale Property
L
1
{F(ks)} =
1
k
f
_
t
k
_
Example
L
1
_
2s
4s
2
+ 16
_
= L
1
_
2s
(2s)
2
+ 16
_
=
1
2
cos
_
4t
2
_
=
cos 2t
2
_
Since L
1
_
s
s
2
+ 16
_
= cos 4t
_
5.9.5 Inverse Laplace Transform of Derivatives
L
1
{F
(n)
(s)} = L
1
_
d
n
ds
n
F(s)
_
= (1)
n
t
n
f(t)
Example
L
1
_
2s
(s
2
+ 1)
2
_
= L
1
_
d
ds
_
1
s
2
+ 1
__
= (1)t f(t) = t sin t
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 112
_
_
Since L
1
_
1
s
2
+ 1
_
= sin t = f(t),
and
d
ds
_
1
s
2
+ 1
_
=
2s
(s
2
+ 1)
2
.
_
_
5.9.6 Inverse Laplace Transform of Integrals
L
1
__
s
F( s) d s
_
=
f(t)
t
Example
L
1
_
_
s
_
1
s
1
s + 1
_
d s
_
=
f(t)
t
=
1 e
t
t
_
Since L
1
_
1
s
1
s + 1
_
= 1 e
t
_
5.9.7 Multiplication by s
If L
1
{F(s)} = f(t), and f(0) = 0, then
L
1
{sF(s)} = f
(t).
If f(0) = 0, then
L
1
{sF(s) f(0)} = f
(t).
Thus multiplication by s has the eect of dierentiating f(t).
Example
L
1
_
s
s
2
+ 1
_
=
d
dt
sin t
. .
f
(t)
= cos t
_
_
_
Since L
1
_
1
s
2
+ 1
_
= sin t,
and sin 0 = 0.
_
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 113
5.9.8 Division by s
L
1
_
F(s)
s
_
=
_
t
0
f() d
Thus division by s (or multiplication by 1/s) has the eect of intergrating
f(t) from 0 to t.
Example
L
1
_
1
s(s
2
+ 4)
_
=
_
t
0
_
sin 2
2
_
. .
f()
d =
cos 2
4
t
0
=
1 cos 2t
4
_
Since L
1
_
1
s
2
+ 4
_
=
sin 2t
2
_
5.9.9 Convolution Theorem
The convolution of f(t) and g(t) is written as
f(t) g(t) =
_
t
0
f()g(t ) d
Properties:
f(t) g(t) = g(t) f(t)
f(t) [g
1
(t) + g
2
(t)] = f(t) g
1
(t) + f(t) g
2
(t)
[f(t) g(t)] u(t) = f(t) [g(t) u(t)]
f(t) 0 = 0
L
1
{F(s)G(s)} = f(t) g(t) =
_
t
0
f()g(t ) d
Example 1
L
1
_
1
(s 1)(s 2)
_
= e
t
e
2t
=
_
t
0
e
e
2(t)
d =
_
t
0
e
2t
e
d
= e
2t
t
0
= e
t
+ e
2t
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 114
_
_
Since L
1
_
1
s 1
_
= e
t
,
and L
1
_
1
s 2
_
= e
2t
.
_
_
Example 2
L
1
_
1
(s
2
+ a
2
)
2
_
=
_
sinat
a
_
_
sinat
a
_
=
_
t
0
_
sina
a
__
sina(t )
a
_
d
=
1
a
2
_
t
0
sina sina(t ) d
=
1
2a
2
_
t
0
_
cos a(2 t) cos at
d
=
1
2a
2
_
sina(2 t)
2a
cos at
_
t
0
=
1
2a
2
_
sinat
2a
sin(at)
2a
t cos at + 0
_
=
1
2a
2
_
sinat
a
t cos at
_
=
1
2a
3
_
sinat at cos at
_
Since L
1
_
1
s
2
+ a
2
_
=
sinat
a
_
5.10 Methods of Finding Inverse Laplace Transforms
(a) Partial fractions method
(b) Series method
(c) Miscellaneous methods using the L
1
{} theorems
(d) Use of tables
(e) The complex inversion formula
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 115
5.10.1 Partial Fractions Method
Rules of Partial Fractions
(a) The numerator must be of lower degree than the denominator. If it is
not, rst divide out.
(b) Factorize the denominator into its prime factors. These factors deter-
mine the shapes of the partial fractions.
(c) A repeated factor (s + a)
2
leads to the following partial fraction
A
s + a
+
B
(s + a)
2
,
and a factor (s + a)
3
leads to
A
s + a
+
B
(s + a)
2
+
C
(s + a)
3
.
(d) A quadratic factor (s
2
+ ps + q) leads to the following partial fraction
As + B
s
2
+ ps + q
,
and the factor (s
2
+ ps + q)
2
leads to
As + B
s
2
+ ps + q
+
Cs + D
(s
2
+ ps + q)
2
.
Example 1
L
1
_
2s 8
s
2
8s + 15
_
= L
1
_
2s 8
(s 3)(s 5)
_
= L
1
_
1
s 3
_
+L
1
_
1
s 5
_
= e
3t
+ e
5t
_
2s 8
(s 3)(s 5)
=
A
s 3
+
B
s 5
, [multiply by (s 3)(s 5)]
= 2s 8 = A(s 5) + B(s 3)
= s(A + B) 5A3B
= 2 = A + B and 8 = 5A + 3B
= A = 1 and B = 1
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 116
Example 2
L
1
_
s
2
2s + 3
(s 2)
3
_
= L
1
_
1
s 2
+
2
(s 2)
2
+
3
(s 2)
3
_
= e
2t
_
1 + 2t +
3t
2
2
_
_
_
s
2
2s + 3
(s 2)
3
=
A
s 2
+
B
(s 2)
2
+
C
(s 2)
3
,
_
multiply by (s 2)
3
_
= s
2
2s + 3 = A(s 2)
2
+ B(s 2) + C
= As
2
+ s(B 4A) + 4A2B + C
= A = 1, B 4A = 2, and 4A2B + C = 3
= A = 1, B = 2, and C = 3
_
_
_
_
L
1
_
1
s 2
_
= e
2t
,
L
1
_
2
(s 2)
2
_
= 2e
2t
t,
L
1
_
3
(s 2)
3
_
= 3e
2t
_
t
2
2
_
,
Translation or shifting : L
1
_
F(s a)
_
= e
at
f(t)
L
1
_
1
s
2
_
= t,
L
1
_
1
s
3
_
=
t
2
2
_
_
Example 3
L
1
_
s
2
+ 2s + 3
(s
2
+ 2s + 2)(s
2
+ 2s + 5)
_
= L
1
_
1/3
s
2
+ 2s + 2
+
2/3
s
2
+ 2s + 5
_
=
1
3
L
1
_
1
(s + 1)
2
+ 1
_
+
2
3
L
1
_
1
(s + 1)
2
+ 4
_
=
1
3
e
t
sint +
_
2
3
__
1
2
_
e
t
sin2t
=
e
t
3
_
sint + sin2t
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 117
_
_
s
2
+ 2s + 3
(s
2
+ 2s + 2)(s
2
+ 2s + 5)
=
As + B
s
2
+ 2s + 2
+
Cs + D
s
2
+ 2s + 5
= s
2
+ 2s + 3 = (As + B)(s
2
+ 2s + 5) + (Cs + D)(s
2
+ 2s + 2)
= (A + C)s
3
+ (2A + B + 2C + d)s
2
+
+ (5A + 2B + 2C + 2D)s + 5B + 2
= A + C = 0, 2A + B + 2C + D = 1,
5A + 2B + 2C + 2D = 2, and 5B + 2D = 3
= A = 0, B =
1
3
, C = 0, and D =
2
3
_
_
_
_
First Translation : L
1
{F(s a)} = e
at
f(t),
L
1
_
1
(s + 1)
2
+ 1
_
= e
t
L
1
_
1
s
2
+ 1
_
= e
t
sint,
L
1
_
1
(s + 1)
2
+ 4
_
= e
t
L
1
_
1
s
2
+ 2
2
_
= e
t
sin2t
2
_
_
5.10.2 Series Method
If F(s) has a series expansion in inverse powers of s given by
F(s) =
a
0
s
+
a
1
s
2
+
a
2
s
3
+
a
3
s
4
+
then
f(t) = a
0
+ a
1
t +
a
2
t
2
2!
+
a
3
t
3
3!
+ .
Example
L
1
_
e
1/s
s
_
= 1 t +
t
2
(2!)
2
t
3
(3!)
2
+
= 1
_
2t
1/2
_
2
2
2
(1!)
2
+
_
2t
1/2
_
4
2
4
(2!)
2
_
2t
1/2
_
6
2
6
(3!)
2
+
= J
0
_
2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 118
B
A
J
K
L
R
+i
i
0
x
y
_
_
1
s
e
1/s
=
1
s
_
1
1
s
+
1
2!s
2
1
3!s
3
+
_
=
1
s
1
s
2
+
1
2!s
3
1
3!s
4
+ ,
L
_
t
n
_
=
n!
s
n+1
,
J
0
[x] = 1
x
2
2
2
(1!)
2
+
x
4
2
4
(2!)
2
+.
_
_
5.10.3 The Complex Inversion Formula
If F(s) = L{f(t)}, then f(t) =
1
2i
_
c
e
st
F(s) ds
Figure 5.6: The Bromwich contour composed by a line AB and the arc
BJKLA of a circle of radius R with center at the origin 0.
5.11 Some Special Functions
5.11.1 The Error Function
The error function as well as the complimentary error function appears
frequently in solutions to heat and mass transfer problems. The functions
are graphically presented in Figure 5.7 and their numerical values for a wide
range of the argument x are tabulated in Table 5.1.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 119
-1
0
1
2
-2 -1 0 1 2 3
er f ( x)
er f c( x)
x
e
r
f
(
x
)
&
e
r
f
c
(
x
)
Figure 5.7: Illustration of erf(x) and erfc(x) as a function of x.
erf(x) =
2
_
x
0
e
u
2
du,
erf(x) = erf(x),
erf(0) = 0,
erf() =
2
_
0
e
u
2
du =
2
2
= 1,
Table 5.1: Values of erf(x) and erfc(x) for various values of x.
x erf(x) erfc(x) x erf(x) erfc(x)
0.1 0.11246 0.88754 1.6 0.97635 0.02365
0.2 0.22270 0.77730 1.7 0.98379 0.01621
0.3 0.32863 0.67137 1.8 0.98909 0.01091
0.4 0.42839 0.57161 1.9 0.99279 0.00721
0.5 0.52050 0.47950 2 0 0.99532 0.00468
0.6 0.60386 0.39614 2.1 0.99702 0.00298
0.7 0.67780 0.32220 2.2 0.99814 0.00186
0.8 0.74210 0.25790 2.3 0.99886 0.00114
0.9 0.79691 0.20309 2.4 0.99931 0.00069
1 0 0.84270 0.15730 2.5 0.99959 0.00041
1.1 0.88021 0.11979 2.6 0.99976 0.00024
1.2 0.91031 0.08969 2.7 0.99987 0.00013
1.3 0.93401 0.06599 2.8 0.99992 0.00008
1.4 0.95229 0.04771 2.9 0.99996 0.00004
1.5 0.96611 0.03389 3 0 0.99998 0.00002
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 120
erf(ix) =
2i
_
x
0
e
u
2
du,
erfc(x) = 1 erf(x) =
2
_
x
e
u
2
du,
L
_
erf(t)
_
=
e
s
2
/4
s
erfc
_
s
2
_
.
Power Series Representation
erf(x) =
2
_
x
x
3
3
+
x
5
10
x
7
42
+
x
9
216
_
=
2
k=0
(1)
k
x
2k+1
k!(2k + 1)
.
Asymptotic Expansion (x >> 0)
erf(x) 1
e
x
2
x
_
1
1
2x
2
+
1 3
2
2
x
4
1 3 5
2
3
x
6
+ +
(1)
n
(2n)!
n!2
2n
x
2n
_
+ R
n
,
where the remainder (error) term R
n
is less than the magnitude of the rst
term to be neglected in the asymptotic expansion and of the same sign, for
x >> 0.
Integrals Expressible in Terms of erf(x)
_
0
e
t
2 sin2tx
t
dt =
2
erf(x),
_
0
e
t
2
sin2tx dx =
e
x
2
2
erf(x).
Derivatives of erf(x)
d
dx
[erf(x)] =
2
e
x
2
,
d
2
dx
2
[erf(x)] =
4
xe
x
2
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 121
d
3
dx
3
[erf(x)] =
1
_
8x
2
4
_
e
x
2
,
d
4
dx
4
[erf(x)] =
8
_
3 2x
2
_
xe
x
2
.
Integrals of erfc(x)
i
n
erfc(x) =
_
x
i
n1
erfc(t) dt (n = 0, 1, 2, . . .),
i
1
erfc(x) =
2
e
x
2
and i
0
erfc(x) = erfc(x),
i erfc(x) =
1
e
x
2
x erfc(x),
i
2
erfc(x) =
1
4
[erfc(x) 2xi erfc(x)] .
Integral and Power Series Representation of ierfc(x)
i
n
erfc(x) =
2
_
x
(t x)
2
n!
e
t
2
dt,
i
n
erfc(x) =
k=0
(1)
k
x
k
2
nk
k!
_
1 +
n k
2
_.
5.11.2 The Dirac Delta Function
The Dirac delta function shown in Figure 5.8 is a mathematical tool and
can only be dened at the limit as k 0. The Dirac delta function is
denoted by
(t a) =
_
t = a,
0 otherwise.
Some very important properties of the Dirac delta function are:
_
0
(t a) dt = 1
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 122
1/k
Area = 1
a a+k
_
0
(t a)f(t) dt = f(a)
L{(t a)} =
_
0
e
st
(t a) dt = e
as
L{(t)} =
_
0
e
st
(t) dt = 1
Figure 5.8: Schematic illustration of Dirac delta function, dened at the
limit k 0.
5.12 Exercises
(1) Find the following Laplace transform
L
_
cos
t
_
_
Hint : L
_
sin
t
_
=
2s
3/2
exp
_
1
4s
__
.
(2) Find L
_
f(t)
_
where
f(t) =
_
sint 0 < t < ,
0 < t < 2.
(3) Evaluate each of the following
(a) L
_
e
3t
cos 2t
_
(b) L
_
e
t
t
2
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 123
(c) L
_
4e
2t
sint
_
(d) L
_
J
0
(t)
_
(e) L
_
J
0
(at)
_
(4) Evaluate each of the following by use of inverse Laplace transform the-
orems
(a) L
1
_
4s + 12
s
2
+ 8s + 16
_
(b) L
1
_
3s + 7
s
2
2s 3
_
(c) L
1
_
se
4s/5
s
2
+ 25
_
(d) L
1
_
s + 1
s
2
+ s + 1
_
(e) L
1
_
4s 2
(s
2
+ 1)
2
_
(f) L
1
_
1
(s
2
+ 1)
3
_
(g) L
1
_
3s + 1
(s 1)(s
2
+ 1)
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 124
O.D.E.
t-space
Algebraic eq.
s-space
Solution
s-space
Semianalytical
solution
Solution
t-space
L
L
-1
Solve
Numerical
inversion
Chapter 6
Application of Laplace Transforms in the Solution of
Ordinary Dierential Equations
6.1 Methodology
The procedure for the solution of an ordinary dierential equation by
Laplace transform techniques is illustrated in Figure 6.1.
Figure 6.1: Outline of the Laplace transform procedure for the solution
of ordinary dierential equations.
6.2 Ordinary Dierential Equations with Constant Coecients
Example 1
d
2
y
dt
2
3
dy
dt
+ 2y = 2e
t
, y(0) = 2,
dy(0)
dt
= 1.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 125
Take Laplace transforms of each term of the ODE with respect to time
variable t
_
s
2
y(s) sy(0) y
(0)
3[s y(s) y(0)] + 2 y(s) = 2
_
1
s + 1
_
,
_
_
L{f
(t)} = sF(s) f(0),
L{f
(t)} = s
2
F(s) sf(0) f
(0),
L
_
e
t
_
=
1
s + 1
.
_
_
employ the boundary conditions
[s
2
y(s) 2s + 1] 3[s y(s) 2] + 2 y(s) =
2
s + 1
= y(s)
_
s
2
3s + 2
2s + 7 =
2
s + 1
= y(s)
_
s
2
3s + 2
=
2s
2
5s 5
s + 1
= y(s) =
2s
2
5s 5
(s + 1)(s 1)(s 2)
y(t) = L
1
{ y(s)} = L
1
_
1/3
s + 1
+
4
s 1
+
7/3
s 2
_
=
1
3
e
t
+ 4e
t
7
3
e
2t
_
2s
2
5s 5
(s + 1)(s 1)(s 2)
=
A
s + 1
+
B
s 1
+
C
s 2
,
=2s
2
5s 5 = A(s 1)(s 2) + B(s + 1)(s 2)
+ C(s + 1)(s 1)
= s
2
(A + B + C) s(3A + B) + 2A2B C,
=A + B + C = 2, 3A + B = 5, 2A2B C = 5,
=A =
1
3
, B = 4, C =
7
3
.
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 126
Example 2
d
3
y
dt
3
3
d
2
y
dt
2
+ 3
dy
dt
y = t
2
e
t
, y(0) = 1, y
(0) = 0, y
(0) = 2.
Take Laplace transforms of each term of the ODE with respect to time
variable t
_
s
3
y(s) s
2
y(0) sy
(0) y
(0)
3
_
s
2
y(s) sy(0) y
(0)
+
+ 3[s y(s) y(0)] y(s) =
2
(s 1)
3
_
_
L
_
f
n
(t)
_
= s
n
F(s) s
n1
f(0) s
n2
f
(0) f
(n1)
(0),
L{e
at
f(t)} = F(s a) (First translation theorem),
L{t
2
} =
2
s
3
.
_
_
= y(s)
_
s
3
3s
2
+ 3s 1
. .
(s1)
3
s
2
+ 3s 1 =
2
(s 1)
3
= y(s) =
s
2
3s + 1
(s 1)
3
+
2
(s 1)
6
=
s
2
2s + 1 s
(s 1)
3
+
2
(s 1)
6
=
(s 1)
2
(s 1) 1
(s 1)
3
+
2
(s 1)
6
=
1
s 1
1
(s 1)
2
1
(s 1)
3
+
2
(s 1)
6
=y(t) = L
1
_
1
s 1
1
(s 1)
2
1
(s 1)
3
+
2
(s 1)
6
_
= e
t
te
t
t
2
e
t
2
+ 2
t
5
e
t
5!
= e
t
_
1 t
t
2
2
+
t
5
60
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 127
6.3 Ordinary Dierential Equations with Variable Coecients
Example 1
t
d
2
y
dt
2
+
dy
dt
+ 4ty = 0, y(0) = 3,
dy(0)
dt
= 0.
Take Laplace transforms of each term of the ODE with respect to time
variable t
_
_
_
Recall the multiplication by t
n
theorem :
L
_
t
n
f(t)
_
= (1)
n
d
n
ds
n
F(s).
_
_
_
=
d
ds
_
s
2
y(s) sy(0)
dy(0)
dt
_
+
_
s y(s) y(0)
4
d
ds
_
y(s)
= 0
=2s y(s) s
2
d y(s)
ds
+ 3 + s y(s) 3 4
d y(s)
ds
= 0
=(s
2
+ 4)
d y(s)
ds
+ s y(s) = 0
=
d y(s)
y(s)
+
s ds
s
2
+ 4
= 0 integration yields
=ln y(s) +
1
2
ln(s
2
+ 4) = C
= y(s) =
e
c
s
2
+ 4
=y(t) = L
1
_
C
s
2
+ 4
_
= C
J
0
(2t)
_
_
_
Laplace transform relationship No. 31, Kreyszig (1993, p.319 )
L
_
J
0
(at)
_
=
1
s
2
+ a
2
_
_
_
To determine C
note that:
J
o
(0) = 1,
y(0) = C
J
0
(0) = 3 =C
= 3
=y(t) = 3J
0
(2t)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 128
t
a
n
(
x
)
2
x
0
0
5
- 5
Example 2
t
d
2
y
dt
2
+ 2
dy
dt
+ ty = 0, y(0) = 1,
dy(0)
dt
= C.
Take Laplace transforms of each term of the ODE with respect to time
variable t, and make use of the multiplication by t
n
theorem.
=
d
ds
_
s
2
y(s) sy(0)
dy(0)
dt
_
+ 2
_
s y(s) y(0)
d
ds
_
y(s)
= 0
=2s y(s) s
2
d y(s)
ds
+ 1 + 0 + 2s y(s) 2
d y(s)
ds
= 0
=(s
2
+ 1)
d y(s)
ds
= 1
=
d y(s)
ds
=
1
s
2
+ 1
= y(s) = tan
1
s + A
From Figure 6.2 it is evident that as s ,
tan
1
(s)
2
.
Furthermore, recall that the behavior of F(s) as s is as follows,
lim
s
F(s) = 0.
Figure 6.2: Plot of tan x as a function of x.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 129
Therefore,
A =
2
.
= y(s) =
2
tan
1
s = tan
1
_
1
s
_
=y(t) = L
1
_
y(s)
_
= L
1
_
tan
1
_
1
s
__
=y(t) =
sint
t
_
_
tan
1
_
1
x
_
=
2
tan
1
x (CRC, p. 171),
From example presented in the Division by t section
recall the relationship : L
_
sint
t
_
= tan
1
_
1
s
_
.
_
_
6.4 Simultaneous Solution of Ordinary Dierential Equations
Example 1
Solve the following system of ordinary dierential equations:
dx
dt
= 2x 3y,
dy
dt
= y 2x,
subject to the conditions x(0) = 8, y(0) = 3.
Taking Laplace transform with respect to time variable t yields
[s x(s) x(0)] = 2 x(s) 3 y(s)
[s y(s) y(0)] = y(s) 2 x(s)
Apply the initial conditions
_
s x(s) 8 = 2 x(s) 3 y(s)
s y(s) 3 = y(s) 2 x(s)
_
=
_
(s 2) x(s) + 3 y(s) = 8
2 x(s) + (s 1) y(s) = 3
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 130
Employ Cramers rule to solve for x(s) and y(s)
x(s) =
8 3
3 (s 1)
(s 2) 3
2 (s 1)
=
8(s 1) 9
(s 2)(s 1) 6
=
8s 17
s
2
3s 4
=
8s 17
(s + 1)(s 4)
=
5
s + 1
+
3
s 4
y(s) =
(s 2) 8
2 3
(s + 1)(s 4)
=
3s 22
(s + 1)(s 4)
=
5
s + 1
2
s 4
Then,
x(t) = L
1
_
5
s + 1
+
3
s 4
_
= 5e
t
+ 3e
4t
y(t) = L
1
_
5
s + 1
2
s 4
_
= 5e
t
2e
4t
Example 2 (From Kreyszig [1993, p. 307])
Solve the following system of ordinary dierential equations governing the
displacements of two masses on springs (see Figure 6.3):
d
2
y
1
dt
2
= k(y
2
2y
1
)
d
2
y
2
dt
2
= k(y
1
2y
2
)
subject to
y
1
(0) = 1, y
2
(0) = 1,
dy
1
(0)
dt
=
3k,
dy
2
(0)
dt
=
3k,
where k is the spring modulus and y
1
, y
2
are the displacements of the
masses from their positions of static equilibrum.
Taking Laplace transform with respect to time variable t yields
[s
2
y
1
(s) sy
1
(0)
dy
1
(0)
dt
] = k y
2
(s) 2k y
1
(s)
[s
2
y
2
(s) sy
2
(0)
dy
2
(0)
dt
] = k y
1
(s) 2k y
2
(s)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 131
1
1= 1
2
= 1
2
Figure 6.3: Schematic illustration of a mechanical system consisting of
two masses on three springs.
Apply the initial conditions
s
2
y
1
(s) s
3k = k y
2
(s) 2k y
1
(s)
s
2
y
2
(s) s +
3k = k y
1
(s) 2k y
2
(s)
=
(s
2
+ 2k) y
1
(s) k y
2
(s) = s +
3k
k y
1
(s) + (s
2
+ 2k) y
2
(s) = s
3k
Employ Cramers rule to solve for y
1
(s) and y
2
(s)
y
1
(s) =
s +
3k k
s
3k (s
2
+ 2k)
(s
2
+ 2k) k
k (s
2
+ 2k)
=
s
3
+ 3sk + s
2
3k + k
3k
(s
2
+ 2k)
2
k
2
=
s(s
2
+ 3k) +
3k(s
2
+ k)
(s
2
+ 3k)(s
2
+ k)
=
s
s
2
+ k
+
3k
s
2
+ 3k
y
2
(s) =
(s
2
+ 2k) s +
3k
k s
3k
(s
2
+ 3k)(s
2
+ k)
=
s
3
+ 3sk s
2
3k k
3k
(s
2
+ 3k)
2
(s
2
+ k)
=
s
s
2
+ k
3k
s
2
+ 3k
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 132
o
Then,
y
1
(t) = L
1
_
s
s
2
+ k
_
+L
1
_
3k
s
2
+ 3k
_
= cos
kt + sin
3kt
y
2
(t) = L
1
{ y
2
(s)} = cos
kt sin
3kt
6.5 Applications to Beams
Example 1
The beam shown in Figure 6.4 is hinged at its ends x = 0, x = and carries
a uniform load W
0
per unit length. Find the deection at any point.
Figure 6.4: Schematic illustration of a beam hinged at its ends carrying
a uniform load per unit length.
The appropriate dierential equation and boundary conditions are:
d
4
y
dx
4
=
W
0
EI
0 < x <
y(0) = 0, y() = 0, y
(0) = 0, y
() = 0,
where E is the modulus of elasticity of material of the beam; I is the second
moment of the crosssectional area of the beam. Taking Laplace transforms
with respect to x yields
s
4
y(s) s
3
y(0) s
2
y
(0) sy
(0) y
(0) =
W
0
EI
_
1
s
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 133
Using the boundary conditions, and replacing the unknown conditions by
the following constants y
(0) = c
1
, y
(0) = c
2
yields
y(s) =
c
1
s
2
+
c
2
s
4
+
W
0
EI
_
1
s
5
_
y(x) = L
1
_
c
1
s
2
_
+L
1
_
c
2
s
4
_
+
W
0
EI
L
1
_
1
s
5
_
= c
1
x +
c
2
3!
x
3
+
W
0
EI
x
4
4!
= c
1
x + c
2
x
3
6
+
W
0
EI
x
4
24
_
Note that : L{t
n
} =
n!
s
n+1
_
y() = 0 = c
1
+
c
2
3
6
+
W
0
EI
4
24
y
() = 0 = c
2
+
W
0
EI
2
2
=
c
1
=
W
0
3
24EI
,
c
2
=
W
0
2EI
.
=y(x) =
W
0
24EI
_
3
x 2x
3
+ x
4
_
Example 2
The cantilever beam shown in Figure 6.5 is clamped at the end x = 0 and
is free at the end x = . Find the deection for the case where the beam
carries a load per unit length given by
W(x) =
_
W
0
0 < x < /2,
0 /2 < x < .
The appropriate dierential equation and boundary conditions are:
d
4
y
dx
4
=
W(x)
EI
0 < x <
y(0) = 0, y
(0) = 0, y
() = 0, y
() = 0.
Using the denition of the Heaviside function
u(t a) =
_
0 t < a
1 t > a
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 134
o
/2
Figure 6.5: Schematic illustration of a cantilever beam with uniform load
covering only the rst half of the beam.
the load distribution can be expressed as
W(x) = W
0
_
u(x) u
_
x
2
__
Taking Laplace transforms of each term of the governing ordinary dieren-
tial equation with respect to time variable t yields
s
4
y(s) s
3
y(0) s
2
y
(0) sy
(0) y
(0) =
W
0
EI
_
1 e
s/2
s
_
_
_
L{f(t a)u(t a)} = e
as
F(s),
L
_
W
0
EI
u(x)
_
=
W
0
EI
1
s
,
L
_
W
0
EI
u
_
x
2
__
=
W
0
EI
e
s/2
s
.
_
_
Using the boundary conditions, and replacing the unknown conditions by
the following constants y
(0) = c
1
, y
(0) = c
2
yields
y(s) =
c
1
s
3
+
c
2
s
4
+
W
0
EIs
5
_
1 e
s/2
=y(x) = L
1
_
c
1
s
3
_
+L
1
_
c
2
s
4
_
+
W
0
EI
L
1
_
1
s
5
_
W
0
EI
L
1
_
e
s/2
s
5
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 135
=
c
1
2!
x
2
+
c
2
3!
x
3
+
W
0
4!EI
x
4
W
0
4!EI
_
x
2
_
4
u
_
x
2
_
=y(x) =
_
_
c
1
x
2
2
+
c
2
x
3
6
+
W
0
x
4
24EI
0 < x <
l
2
c
1
x
2
2
+
c
2
x
3
6
+
W
0
x
4
24EI
W
0
24EI
_
x
2
_
4
x >
2
Now use the conditions at x = to obtain the constants c
1
and c
2
_
_
y
(l) = 0 = c
1
+ c
2
+
W
0
2
2EI
W
0
2EI
_
2
_
2
= c
1
+ c
2
+
3W
0
2
8EI
y
(l) = 0 = c
2
+
W
0
EI
W
0
EI
_
2
_
= c
2
+
W
0
2EI
=c
1
=
W
0
2
8EI
, c
2
=
W
0
2EI
,
y(x) =
_
_
W
0
2
16EI
x
2
W
0
12EI
x
3
+
W
0
24EI
x
4
0 < x <
2
W
0
2
16EI
x
2
W
0
12EI
x
3
+
W
0
24EI
x
4
W
0
24EI
_
x
2
_
4
2
< x <
6.6 Exercises
Use Laplace transforms to solve the following:
(1) y
(t) + y(t) = 1 given y(0) = 1 and y
(0) = 0.
(2) 2x
(t) + 3x(t) = e
4t
given x(0) = 5.
(3) y
(t) + y(t) = t given y(0) = 1 and y
(0) = 2.
(4) x
(t) 3x(t) = te
2t
given x(0) = 0.
(5) y
(t) 3y
(t) + 2y(t) = 4e
2t
given y(0) = 3 and y
(0) = 5.
(6) y
IV
(t) +2y
(t) +y(t) = sint given y(0) = 1, y
(0) = 2, y
(0) = 3,
and y
(0) = 0.
(7) A uniform light horizontal beam PQ, of length 2c end supported at P,
carries a load which decreases uniformly from w (newtons/m) at P
to zero at x = c. A point load F (newtons) occurs at a distance b
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 136
W
P Q
F
c
b
2c
from P. Find an expression for the displacement at any point in the
beam in terms of x.
d
4
y
dx
4
=
1
EI
W(x)
where
W(x) =
_
w
w
c
x
_
_
w
w
c
x
_
u(x c) + F(x b)
u(x c) =
_
1 x > c,
0 x < c.
given
y(0) = 0, y
(0) = 0, y
(2c) = 0, and y
(2c) = 0.
Figure 6.6: Schematic illustration of the loaded beam for problem 6.7.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 137
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 138
y
z
i
j
k
0,0,1)
(0,1,0)
( 1,0,0)
Chapter 7
Linear Algebra
7.1 Vectors
A vector quantity is distinquished from a scalar quantity by the fact that
a scalar quantity possesses only magnitude, whereas, a vector quantity
possesses both magnitude and direction.
7.1.1 Laws of Vector Algebra (A, B and C are vectors, and m, n
scalars)
A+B = B+A Commutative law for addition
A+ (B+C) = (A+B) +C Associative law for addition
m(nA) = (mn)A = n(mA) Associative law for multiplication
(m + n)A = mA+ nA Distributive law
m(A+B) = mA+ mB Distributive law
7.1.2 Unit Vectors
Unit vectors are vectors having unit length. The rectangular unit vectors
i, j and k, shown in Figure 7.1, are unit vectors having the direction of the
positive x, y and z axes of a rectangular (Cartesian) coordinate system.
Figure 7.1: Unit vectors for a Cartesian coordinate system.
7.1.3 Components of a Vector
Any vector in R
3
can be represented by component vectors (i.e., A =
a
1
i + a
2
j + a
3
k). The magnitude of A is |A| = (a
2
1
+ a
2
2
+ a
2
3
)
1/2
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 139
A
B
P =0
A
B
P > 0
B
P < 0
7.1.4 Dot or Scalar Product
The dot product of two vectors A and B denoted A B (read A dot B) is
dened as the product of the magnitudes of A and B and the cosine of the
angle () between them:
A B = |A||B|cos, 0 .
The projection, P, of A in the direction of B is given by
P = |A| cos =
A B
|B|
.
Figure 7.2: Projection of A onto B for three dierent angles.
Note that A B is a scalar and the following laws are applicable:
(a) A B = B A Commutative law for the dot product
(b) A (B+C) = A B+A C Distributive law
(c) m(A B) = (mA) B = A (mB) = (A B)m
(d) i i = j j = k k = 1, i j = j k = k i = 0
(e) If A = a
1
i + a
2
j + a
3
k and B = b
1
i + b
2
j + b
3
k, then
A B = a
1
b
1
+ a
2
b
2
+ a
3
b
3
A A = |A|
2
= a
2
1
+ a
2
2
+ a
2
3
B B = |B|
2
= b
2
1
+ b
2
2
+ b
2
3
(f) If A B =0 and A and B are not null vectors, then A and B are
perpendicular
7.1.5 General Vector Space
A set of vectors is called a real or linear vector space if the laws of vector
algebra are dened and contains a zero or null vector,
A+0 = A,
and for every vector A there is a vector A such that
A+ (A) = 0.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 140
a
jk
row column
7.1.6 Gradient and Divergence
Consider the vector operator (del) dened by
i
x
+j
y
+k
z
.
Then, if = f(x, y, z) and A have continuous rst partial derivatives in a
region, the following can be dened.
Gradient: The gradient of is dened by
grad = =
_
i
x
+j
y
+k
z
_
=
x
i +
y
j +
z
k.
Interpretation: if is the equation of a surface, then is a normal to this
surface.
Divergence: The divergence of A is dened by
divA = A =
_
i
x
+j
y
+k
z
_
(a
1
i+a
2
j+a
3
k) =
a
1
x
+
a
2
y
+
a
3
z
.
7.2 Matrices
7.2.1 Denition of a Matrix
A matrix of order mn is a rectangular array of numbers having m rows
and n columns. It can be written in the form
A =
_
_
a
11
a
12
a
1n
a
21
a
22
a
2n
a
m1
a
m2
a
mn
_
_
Each number a
jk
is called an element. The subscripts j and k indicate
respectively the row and column of the matrix in which the element appears
as shown in Figure 7.3.
Figure 7.3: The jth row and kth column element of a matrix.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 141
A matrix is often denoted by A or by the symbol (a
jk
) which shows a
representative element.
A matrix having one row is called a row matrix or row vector:
a = [ a
1
a
2
a
n
] ,
while a matrix having only one column is called a column matrix or
column vector:
b =
_
_
b
1
b
2
.
.
.
b
m
_
_
.
If the number of rows m and columns n are equal the matrix is called a
square matrix of order n n or briey n.
A matrix is said to be real matrix or complex matrix according to whether
its elements are real or complex numbers, respectively.
7.2.2 Some Special Denitions and Operations Involving Matrices
Equality of Matrices
Two matrices A = (a
jk
) and B = (b
jk
) of the same order (i.e., equal
number of rows and columns) are equal if and only if a
jk
= b
jk
.
Addition of Matrices
If A = (a
jk
) and B = (b
jk
) have the same order we dene the sum of A
and B as A+B = (a
jk
+ b
jk
).
Example
If A =
_
2 1 4
3 0 2
_
, B =
_
3 5 1
2 1 3
_
, then
A+B =
_
2 + 3 1 5 4 + 1
3 + 2 0 + 1 2 + 3
_
=
_
5 4 5
1 1 5
_
.
Subtraction of Matrices
If A = (a
jk
) and B = (b
jk
) have the same order, we dene the dierence
of A and B as AB = (a
jk
b
jk
).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 142
n
m
=
A
m C
n
p
B
p
Example
AB =
_
2 1 4
3 0 2
_
_
3 5 1
2 1 3
_
=
_
2 3 1 + 5 4 1
3 2 0 1 2 3
_
=
_
1 6 3
5 1 1
_
Multiplication of a Matrix by a Number
If A = (a
jk
) and is any number (or scalar) we dene the product of A
by as A = A = (a
jk
).
Example
A = 4
_
2 1 4
3 0 2
_
=
_
8 4 16
12 0 8
_
Multiplication of Matrices
If A = (a
jk
) is an m n matrix while B = (b
jk
) is an n p matrix, then
we dene the product AB of A and B as the matrix C = (c
jk
) where
c
jk
=
n
l=1
a
jk
b
lk
and C is of order mp. Note that matrix multiplication is dened if and
only if the number of columns of A is the same as the number of rows of B,
as shown in Figure 7.4. Such matrices are sometimes called conformable.
Figure 7.4: Schematic representation of matrix multiplication: AB=C.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 143
Example
let A =
_
2 1 4
3 0 2
_
, D =
_
_
3 5
2 1
4 2
_
_
then,
AD =
_
2 3 + 1 2 + 4 4 2 5 + 1 (1) + 4 2
3 3 + 0 2 + 2 4 3 5 + 0 (1) + 2 2
_
=
_
24 17
1 11
_
.
Properties of Matrix Multiplication
(a) AB = BA in general
(b) A(BC) = (AB)C
(c) A(B+C) = AB+AC
(d) (B+C)A = BA+CA
(e) AB = 0 does not necessarily imply that A = 0 or B = 0
(f) A matrix can be multiplied by itself if and only if it is a square matrix
A A = A
2
A A
2
= A
3
A A
3
= A
4
(g) Idepotent matrix
A
2
= A
Transpose of a Matrix
If we interchange rows and columns of a matrix A, the resulting matrix is
called the transpose of A and is denoted by A
T
. In symbols, if A = (a
jk
)
then A
T
= (a
kj
).
Example
The transpose of A =
_
2 1 4
3 0 2
_
is A
T
=
_
_
2 3
1 0
4 2
_
_
.
Useful Relationships of the Transpose
(A+B)
T
= A
T
+B
T
(AB)
T
= B
T
A
T
(A
T
)
T
= A
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 144
Symmmetric and SkewSymmetric Matrices
A square matrix A is called symmetric if A
T
= A and skewsymmetric if
A
T
= A
Example
E =
_
2 4
4 3
_
symmetric
F =
_
0 2
2 0
_
skewsymmetric
Complex Conjugate of a Matrix
If all elements a
jk
of a matrix A are replaced by their complex conjugates
a
jk
, the matrix obtained is called the complex conjugate of A and is denoted
by
A. Therefore,
A
A
Hermitian and SkewHermitian Matrices
A =
A
T
Hermitian A =
_
5 1 8i
1 + 8i 14
_
A =
A
T
skewHermitian A =
_
8i 4 + i
4 + i i
_
Principal Diagonal and Trace of a Matrix
If A = (a
jk
) is a square matrix, then the diagonal which contains all
elements for which j = k is called the principal or main diagonal and the
sum of all such elements is called the trace of A.
A matrix for which a
jk
= 0 when j = k is called a diagonal matrix
Examples
_
_
5 2 0
3 1 2
1 4 2
_
_
trace = 5 + 1 + 2 = 8
_
_
5 0 0
0 1 0
0 0 2
_
_
diagonal matrix
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 145
Unit Matrix (or Identity Matrix)
A square matrix in which all elements of the principal diagonal are equal to
1 while all other elements are zero is called the unit matrix and is denoted
by
I =
_
_
1 0 0
0 1 0
0 0 1
_
_
.
A couple important properties of I are the following
AI = IA = A,
I
n
= I (n = 1, 2, 3, ).
The unit matrix plays a role in matrix algebra similar to that played by
the number one in ordinary algebra.
Zero or Null Matrix
A matrix whose elements are all equal to zero is called the zero or null
matrix, and is denoted by 0. Given that A and 0 are of the same order
then
A+0 = 0 +A = A.
7.2.3 Gaussian Elimination (Triangular Factorization)
The Gauss elimination is a standard method for solving systems of linear
equations
Ax = b.
Example
Consider the following system:
_
_
2 1 1
4 1 0
2 2 1
_
_
_
_
x
1
x
2
x
3
_
_
=
_
_
1
2
7
_
_
Elimination steps: (i) Substract 2 times the rst equation from the second,
(ii) substract (-1) times the rst equation from the third,
(iii) substract (-3) times the second equation from the third.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 146
_
_
2 1 1
0 1 2
0 0 4
_
_
. .
upper triangular U
_
_
x
1
x
2
x
3
_
_
=
_
_
1
4
4
_
_
. .
c
Ux = c.
Now obtain the vector x = [x
1
, x
2
, x
3
]
T
by backsubstitution. The matrices
that accomplish steps (i), (ii) and (iii) are:
E
21
=
_
_
1 0 0
2 1 0
0 0 1
_
_
, E
31
=
_
_
1 0 0
0 1 0
1 0 1
_
_
, E
32
=
_
_
1 0 0
0 1 0
0 3 1
_
_
E
32
E
31
E
21
=
_
_
1 0 0
2 1 0
5 3 1
_
_
= L
1
(lower triangular)
E
32
E
31
E
21
A = U
E
32
E
31
E
21
b = c
L = E
1
21
E
1
31
E
1
32
=
_
_
1 0 0
2 1 0
1 3 1
_
_
A = LU.
7.2.4 Rank of a Matrix
The maximum number of linearly independent row vectors of a matrix A
is called the rank of A. The procedure for obtaining the rank of a matrix is
to use Gaussian elimination to reduce the matrix A into an echelon form:
U =
_
_
0
0 0
0 0 0 0 0
0 0 0 0 0 0
_
_
Rank = Number of pivots
A non zero diagonal entry of the matrix is called a pivot
Row rank = Column rank
It should be noted that the previous matrix is a singular matrix because
its rank is smaller than the number of rows. Furthermore, if the number
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 147
of pivots is less than the number of rows, then we have innitely many
solutions, since some elements of x (Ax = b) remain arbitrary.
A system of linear equations is:
Overdetermined: More equations than unknowns,
Determined: The number of equations is equal to the unknowns,
Underdetermined: Fewer equations than unknowns.
Overdetermined and determined systems may or maynot have a solution,
whereas underdetermined systems always have solutions.
7.2.5 Inverse of a Matrix
If for a given matrix A there exists a matrix B such that AB = I, then B
is called an inverse of A and is denoted by A
1
.
Existence: An inverse exists only when the rank is as large as possible.
(Non singular or det A = 0).
Useful Formulas
(a) A
1
=
adj A
det A
=
[A
ij
]
T
det A
,
adj A = adjugate A = [A
ij
]
T
,
A
ij
= (1)
i+j
det M
ij
,
where M
ij
is the minor formed by deleting row i and column j of A, and
A
ij
is the cofactor.
Example
A =
_
a
11
a
12
a
21
a
22
_
adj A =
_
A
11
A
21
A
12
A
22
_
=
_
a
22
a
12
a
21
a
11
_
_
a
11
a
21
a
12
a
22
_ _
A
11
A
21
A
12
A
22
_
. .
adjugate
=
_
det A 0
0 det A
_
(b) The inverse of a diagonal matrix is easily obtained as follows:
A =
_
_
a
11
0 0
0 a
22
0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 a
nn
_
_
, A
1
=
_
_
1/a
11
0 0
0 1/a
22
0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 1/a
nn
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 148
Properties of the Inverse
(AB)
1
= B
1
A
1
(A
1
)
1
= A
7.2.6 GaussJordan Elimination
A =
_
_
2 1 1
4 1 0
2 2 1
_
_
[A|I] =
_
_
2 1 1 | 1 0 0
4 1 0 | 0 1 0
2 2 1 | 0 0 1
_
_
=
_
_
2 1 1 | 1 0 0
0 1 2 | 2 1 0
0 3 2 | 1 0 1
_
_
r
2
2r
1
r
3
+ r
1
=
_
U
L
1
_
=
_
_
2 1 1 | 1 0 0
0 1 2 | 2 1 0
0 0 4 | 5 3 1
_
_
r
3
+ 3r
2
A = LU
=
_
_
1 1/2 1/2 | 1/2 0 0
0 1 2 | 2 1 0
0 0 1 | 5/4 3/4 1/4
_
_
r
1
/2
r
2
r
3
/4
=
_
_
1 0 1/2 | 1/2 1/2 0
0 1 0 | 1/2 1/2 1/2
0 0 1 | 5/4 3/4 1/4
_
_
r
1
r
2
/2
r
2
2r
3
=
_
_
1 0 0 | 1/8 1/8 1/8
0 1 0 | 1/2 1/2 1/2
0 0 1 | 5/4 3/4 1/4
_
_
r
1
+ r
3
/2
=A
1
=
_
_
1/8 1/8 1/8
1/2 1/2 1/2
5/4 3/4 1/4
_
_
AA
1
= A
1
A = I (Check)
Inverse by LU Decomposition
A = LU =A
1
= (LU)
1
= U
1
L
1
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 149
7.3 Determinants
A determinant of nth order is a scalar associated with an n n matrix.
A =
_
_
2 1 1 3
3 2 5 0
1 0 2 2
4 2 3 1
_
_
det A =
n
k=1
a
jk
A
jk
Cofactor (A
jk
): If we multiply the determinant of the minor M
jk
(of a
jk
)
by (1)
j+k
, the result is called the cofactor of a
jk
and is denoted by A
jk
A
jk
= (1)
j+k
det M
jk
.
Minor (M
jk
): Given any element a
jk
of A we associate a new determinant
of order (n 1) obtained by removing all elements of the jth row and kth
column called the minor of a
jk
. For instance,
M
23
=
_
_
2 1 3
1 0 2
4 2 1
_
_
.
Example
Evaluate the following determinant
3 2 2
1 2 3
4 1 2
by (a) using elements of the rst row (b) using elements of the second row.
(a) 3
2 3
1 2
(2)
1 3
4 2
+ 2
1 2
4 1
=
= (3)(7) (2)(14) + 2(7) = 35
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 150
0,0)
(x
2
,y
2
)
(x
1
,y
1
)
(b) (1)
2 2
1 2
+ 2
3 2
4 2
(3)
3 2
4 1
=
= (1)(6) + 2(2) (3)(11) = 35
7.3.1 Theorems on Determinants
(a) det A = det A
T
(b) An interchange of any two rows (or columns) changes the sign of the
determinant.
(c) If all elements in any row (or column) are multiplied by a number, the
determinant is also multiplied by this number.
Caution: det(kA) = k
n
det A
(d) If A and B are square matrices of the same order, then
det(AB) = det A det B
(e) If all the entries in a row (or a column) of a determinant are zero, the
value of the determinant is zero.
7.3.2 Cramers Rule (Revisit)
Determinants are also used for the solution of systems of n equations in n
unknowns. For instance, assume the following system
x
1
+ 3x
2
= 0,
2x
1
+ 4x
2
= 6,
x
1
=
0 3
6 4
1 3
2 4
=
18
2
= 9, x
2
=
1 0
2 6
1 3
2 4
=
6
2
= 3.
The physical interpretation of det E, where E =
_
x
1
y
1
x
2
y
2
_
, is the area of
the corresponding parallelogram as shown in Figure 7.5.
Figure 7.5: Schematic representation of det E.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 151
7.3.3 Eigenvalues and Eigenvectors
Let A = (a
jk
) be an n n matrix and x a column vector. The equation
Ax = x where is a constant can be written as
_
_
a
11
a
12
a
1n
a
21
a
22
a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
n1
a
n2
a
nn
_
_
_
_
x
1
x
2
.
.
.
x
n
_
_
=
_
_
x
1
x
2
.
.
.
x
n
_
_
or =
x
1
(a
11
) + x
2
a
12
+ + x
n
a
1n
= 0
x
1
a
21
+ x
2
(a
22
) + + x
n
a
2n
= 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
x
1
a
n1
+ x
2
a
n2
+ + x
n
(a
nn
) = 0
Clearly, x = 0 is a trivial solution. For nontrivial solutions
a
11
a
12
a
1n
a
21
a
22
a
2n
a
n1
a
n2
a
nn
= 0
=det(AI) = 0 (Characteristic equation)
which is a polynomial equation of degree n in . The roots of this poly-
nomial are called eigenvalues of A. For each eigenvalue there will be a
solution x = 0. The vector x is called eigenvector.
7.3.4 Application
Consider the case of vibrating masses on springs (see Figure 7.6)
y
1
= a
1
y
1
+ a
2
y
2
y
2
= b
1
y
1
b
2
y
2
=y
= Ay =
_
y
1
y
2
_
=
_
a
1
a
2
b
1
b
2
_ _
y
1
y
2
_
Assuming that y = xe
wt
is a trial solution, then
=w
2
xe
wt
= Axe
wt
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 152
0
y
1
k
1
k
2
m
1
m
2
0
y
2
Figure 7.6: Schematic illustration of two vibrating masses on strings.
=Ax = x,
where = w
2
.
Therefore, the system examined reduces to an eigenvalue problem.
Example
Find the eigenvalues of the matrix
A =
_
_
5 7 5
0 4 1
2 8 3
_
_
If x = [x
1
, x
2
, x
3
]
T
, we must consider the system of equations Ax = x,
i.e.,
_
_
5 7 5
0 4 1
2 8 3
_
_
_
_
x
1
x
2
x
3
_
_
=
_
_
x
1
x
2
x
3
_
_
,
=
_
_
5x
1
+7x
2
5x
3
4x
2
x
3
2x
1
+8x
2
3x
3
_
_
=
_
_
x
1
x
2
x
3
_
_
.
Equating corresponding elements of these matrices, we nd
(5 )x
1
+ 7x
2
5x
3
= 0
(4 )x
2
x
3
= 0
2x
1
+ 8x
2
(3 + )x
3
= 0
()
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 153
This system will have nontrivial solutions if
5 7 5
0 4 1
2 8 3
= 0.
Expansion of this determinant yields
(5 )
4 1
8 3
+ 2
7 5
4 1
=
=(5 )[(4 )(3 + ) + 8] + 2[7 + 5(4 )] =
=6 11 + 6
2
3
=
=( 1)( 2)( 3) = 0.
= = 1, 2, 3 (eigenvalues).
Now determine the eigenvectors:
(a) Corresponding to = 1, equation () becomes
4x
1
+7x
2
5x
3
= 0
3x
2
x
3
= 0
2x
1
+8x
2
4x
3
= 0
4 7 5
0 3 1
2 8 4
4 7 5
0 3 1
0 4.5 1.5
4 7 5
0 3 1
0 0 0
.
Solving for x
1
and x
3
in terms of x
2
yields
x
3
= 3x
2
, x
1
= 2x
2
.
Then, one of the corresponding eigenvectors is
_
_
x
1
x
2
x
3
_
_
=
_
_
2x
2
x
2
3x
2
_
_
= x
2
_
_
2
1
3
_
_
or simply
_
_
2
1
3
_
_
,
because any scalar (constant) multiple of this eigenvector is also an eigen-
vector.
(b) Similarly, for = 2 equation () becomes
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 154
3x
1
+7x
2
5x
3
= 0
2x
2
x
3
= 0
2x
1
+8x
2
5x
3
= 0
Solving for x
1
and x
3
in terms of x
2
yields
x
1
= x
2
, x
3
= 2x
2
.
Therefore, one of the corresponding eigenvectors is
_
_
x
1
x
2
x
3
_
_
=
_
_
x
2
x
2
2x
2
_
_
= x
2
_
_
1
1
2
_
_
or simply
_
_
1
1
2
_
_
(c) Finally, for = 3, equation () becomes
2x
1
+7x
2
5x
3
= 0
x
2
x
3
= 0
2x
1
+8x
2
6x
3
= 0
Solving for x
1
and x
3
in terms of x
2
yields
x
3
= x
2
, x
1
= x
2
.
Thus, one of the corresponding eigenvectors is
_
_
x
1
x
2
x
3
_
_
=
_
_
x
2
x
2
x
2
_
_
= x
2
_
_
1
1
1
_
_
or simply
_
_
1
1
1
_
_
Now determine a set of unit vectors.
The unit eigenvectors have the property that they have length 1, i.e., the
sum of the squares of their components=1. To obtain such eigenvectors
we divide each vector by the square root of the sum of the squares of the
components. Thus, the corresponding unit eigenvectors are as follows:
_
_
2/
14
1/
14
3/
14
_
_
,
_
_
1/
6
1/
6
2/
6
_
_
,
_
_
1/
3
1/
3
1/
3
_
_
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 155
7.3.5 Multiple Eigenvalues
Consider the matrix A which leads to multiple eigenvalues (Kreyszig, 1993,
p.389)
A =
_
_
2 2 3
2 1 6
1 2 0
_
_
,
=det(AI) = ( 5)( + 3)
2
= 0,
=
1
= 5,
2
=
3
= 3.
Now determine the eigenvectors:
(a) Corresponding to
1
= 5 the following set of equations is obtained
7x
1
+2x
2
3x
3
= 0
2x
1
4x
2
6x
3
= 0
x
1
2x
2
5x
3
= 0
Solving for x
1
and x
2
in terms of x
3
yields
x
1
= x
3
, x
2
= 2x
3
.
The corresponding eigenvector is
_
_
1
2
1
_
_
,
(b) Corresponding to
2
=
3
= 3 the following set of equations is ob-
tained
x
1
+2x
2
3x
3
= 0
2x
1
+4x
2
6x
3
= 0
x
1
2x
2
+3x
3
= 0
1 2 3
2 4 6
1 2 3
1 2 3
0 0 0
0 0 0
.
A basis of solutions consists of two linearly independent vectors (Number
of vectors = Number of equations - Rank). It should be noted that a basis
or fundamental system of solutions refers to linearly independent solutions.
Let x
2
= 0, then x
1
= 3x
3
_
_
3
0
1
_
_
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 156
subsequently let x
3
= 0, then x
1
= 2x
2
_
_
2
1
0
_
_
.
7.3.6 Complex Eigenvalues
For the case of real matrices with complex eigenvalues and eigenvectors the
procedure is as follows (Strang, 1980, p. 193):
det(AI) =
1 0
1 0
0 0 1
= (1 )(
2
+ 1) = 0,
=
1
= 1,
2
= i,
3
= i.
1
= 1 :
1 1 0
1 1 0
0 0 0
, x
1
= x
2
= 0
_
_
0
0
1
_
_
,
2
= i :
i 1 0
1 i 0
0 0 1 i
, x
2
= ix
1
, x
3
= 0
_
_
1
i
0
_
_
,
3
= i :
i 1 0
1 i 0
0 0 1 + i
, x
2
= ix
1
, x
3
= 0
_
_
1
i
0
_
_
.
7.3.7 Reduction of Matrix to Diagonal Form
If a nonsingular matrix A has distinct eigenvalues
1
,
2
,
3
, , with cor-
responding eigenvectors written as columns in matrix B,
B =
_
_
b
11
b
12
b
21
b
22
.
.
.
.
.
.
.
.
.
_
_
, then,
B
1
AB =
_
1
0 0
0
2
0
0 0
3
.
.
.
.
.
.
.
.
.
.
.
.
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 157
i.e., B
1
AB, called the transform of A by B, is a diagonal matrix contain-
ing the eigenvalues of A in the main diagonal and zeros elsewhere.
Example
If the columns of B are the eigenvectors of A,
A =
_
_
5 7 5
0 4 1
2 8 3
_
_
, where B =
_
_
2 1 1
1 1 1
3 2 1
_
_
,
and the inverse of B is
B
1
=
_
_
1 3 2
2 5 3
1 1 1
_
_
,
then
B
1
AB =
_
_
1 3 2
2 5 3
1 1 1
_
_
_
_
5 7 5
0 4 1
2 8 3
_
_
_
_
2 1 1
1 1 1
3 2 1
_
_
=
_
_
1 0 0
0 2 0
0 0 3
_
_
.
The diagonal elements are the eigenvalues of matrix A. These eigenvalues
have also been derived in the example presented in section 7.3.4.
7.3.8 Properties of Eigenvalues and Eigenvectors
(a) The eigenvalues of a matrix are unique but not the eigenvectors.
(b) If A has n distinct eigenvalues, then it has n independent eigenvectors.
The converse is not always true.
(c) The trace of A is equal to the sum of the diagonal elements and also
equal to the sum of the eigenvalues of A.
(d) The determinant of A is equal to the product of its eigenvalues.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 158
7.4 Exercises
(1) Consider a vector represented by an arrow running from a point P to
a point Q (P Q). The straight line through P and Q is called
the line of action of the vector, the point P is called the origin of the
vector and the point Q is called the terminus of the vector. (a) If a
and b are vectors with a common origin O and terminuses A and B,
in terms of a and b, nd the vector OC where C is the middle point of
AB. (b) If a, b, c and d have a common origin and terminuses A, B,
C, and D, and if ba = c d show that ABCD is a parallelogram.
(c) Prove that the line joining the middle points of any two sides of
a triangle is parallel to the third side, and is equal in length to one
half of the length of the third side. Note: You are not allowed to use
a coordinate system to solve the above problems.
(2) Show that (A+B)
2
= A
2
+AB+BA+B
2
given that
A =
_
_
2 1 1
1 2 3
2 1 2
_
_
, B =
_
_
1 1 2
2 1 3
2 1 1
_
_
.
(3) Use GaussJordan elimination to nd the inverse of
A =
_
_
1 0 2
2 1 3
4 1 8
_
_
.
(4) Evaluate the following determinant
2 1 1 4
2 3 2 5
1 2 3 2
4 3 2 2
.
(5) Prove that if A is a nonsingular matrix, then
det A
1
=
1
det A
(6) Use LU decomposition to nd the inverse of
A =
_
_
2 1 1
4 1 3
2 4 0
_
_
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 159
(7) Find the eigenvalues and eigenvectors of
A =
_
_
5 1 0
0 4 1
0 1 4
_
_
.
(8) Find the eigenvalues and eigenvectors of
A =
_
cos sin
sin cos
_
.
(9) Use properties of the transpose to show that
A =
_
cos sin
sin cos
_
is an orthogonal matrix.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 160
Chapter 8
Fourier Series, Fourier Integrals, Fourier Transforms
8.1 Periodic Functions
A periodic function, as illustrated in Figure 8.1, is any function for which
f(t) = f(t + p), t.
The smallest constant p that satises this function is called the period of
the function. Similarly, we can state that
f(t) = f(t + np), n = 0, 1, 2, . . . .
Figure 8.1: Plot of the periodic function f(t) = 2.5 + sin t + cos 2t, with
period 2.
Example
Find the period of the following function
f(t) = cos(t/3) + cos(t/4).
Employing the denition of a periodic function and the trigonometric iden-
tity
cos(x + y) = cos x cos y sinx siny
=cos( + 2m) = cos (m = integer)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 161
we can write
cos
_
t + p
3
_
+ cos
_
t + p
4
_
= cos
t
3
+ cos
t
4
,
=
p
3
= 2m, and
p
4
= 2n (m, n integers)
=p = 6m = 8n
Therefore, as also shown in Figure 8.2, the smallest value of p is obtained
when m = 4 and n = 3. Thus,
p = 24
Figure 8.2: Plot of the periodic function f(t) = cos (t/3) + cos (t/4),
with period 24.
8.2 Properties of Periodic Functions
For a periodic function f(t) = f(t + p), the following properties are appli-
cable:
_
f(t) dt =
_
+p
+p
f(t) dt,
_
p
0
f(t) dt =
_
+p
f(t) dt.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 162
8.3 Fourier Series
Let the function f(t) be periodic with period 2. This function can then
be represented by the trigonometric series:
f(t) = a
0
+ a
1
cos t + b
1
sin t + a
2
cos 2t + b
2
sin 2t +
=f(t) = a
0
+
n=1
(a
n
cos nt + b
n
sin nt) Fourier series
where a
0
, a
n
and b
n
are the Fourier coecients.
8.3.1 Orthogonality Relations for Sine and Cosine Functions
Assuming that
o
= 2/p the following orthogonality properties can be
derived:
_
p
2
p
2
cos(m
o
t) dt = 0 for m = 0 (1)
_
p
2
p
2
sin(m
o
t) dt = 0 m (2)
_
p
2
p
2
cos(m
o
t) cos(n
o
t) dt =
_
_
_
0 m = n
p/2 m = n = 0
(3)
_
p
2
p
2
sin(m
o
t) sin(n
o
t) dt =
_
_
_
0 m = n
p/2 m = n = 0
(4)
_
p
2
p
2
sin(m
o
t) cos(n
o
t) dt = 0 m, n (5)
Therefore, 1, cos(n
o
t), sin(n
o
t) form an orthogonal set of functions on
the interval p/2 < t < p/2.
Example
Verify the orthogonality relation (3). In view of the trigonometric identity
cos a cos b =
1
2
[cos(a + b) + cos(a b)] , and
o
t
t=
p
2
=
2
p
_
p
2
_
= , where
o
=
2
p
we have
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 163
_
p
2
p
2
cos(m
o
t) cos(n
o
t) dt =
=
1
2
_
p
2
p
2
_
cos[(m + n)
o
t] + cos[(mn)
o
t]
_
dt
=
sin[(m + n)
o
t]
2(m + n)
o
p
2
p
2
+
sin[(mn)
o
t]
2(mn)
o
p
2
p
2
=
sin[(m + n)] + sin[(m + n)]
2(m + n)
o
+
sin[(mn)] + sin[(mn)]
2(mn)
o
=0 if m = n (because sin k = 0 k).
For m = n = 0, by using the following trigonometric identity,
cos
2
a =
1
2
(1 + cos 2a), we have
_
p
2
p
2
cos(m
o
t) cos(n
o
t) dt =
_
p
2
p
2
cos
2
(m
o
t) dt
=
1
2
_
p
2
p
2
[1 + cos(2m
o
t)] dt
=
t
2
p
2
p
2
+
sin(2m
o
t)
4m
o
p
2
p
2
=
p
2
+
sin(2m)
2m
o
=
p
2
8.3.2 Evaluation of Fourier Coecients
Using the sine and (or) cosine orthogonality relationship, we can evaluate
the coecients of the Fourier series
() f(t) = a
0
+
n=1
(a
n
cos nt + b
n
sinnt)
with period 2, to be
a
0
=
1
2
_
f(t) dt, (a)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 164
a
n
=
1
f(t) cos nt dt (n = 1, 2, ), (b)
b
n
=
1
f(t) sinnt dt (n = 1, 2, ). (c)
Proof
(a) If we integrate the Fourier series () over (, ) and use the ortogo-
nality relationships (1) and (2), we obtain
_
f(t) dt =
_
a
0
dt +
_
n=1
(a
n
cos nt + b
n
sinnt)
_
dt
= 2a
0
+
n=1
_
a
n
cos nt dt
. .
0 (orth.#1)
+
n=1
_
b
n
sinnt dt
. .
0 (orth.#2)
= 2a
0
=a
0
=
1
2
_
f(t) dt
(b) Multiplying both sides of () by cos mt and integrating over (, ),
we get
_
f(t) cos mtdt = a
0
_
cos mt dt
. .
0 (#1)
+
n=1
a
n
_
cos nt cos mt dt
. .
a
n
for m=n (#3)
+
n=1
b
n
_
sinnt cos mt dt
. .
0 (#5)
= a
n
=a
n
=
1
f(t) cos mt dt
(c) Multiplying both sides of () by sinmt and intergrating over (, ),
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 165
f(t)
t
1
0
2 3 2
we get
_
f(t) sinmt dt = a
0
_
sinmt dt
. .
0 (#2)
+
n=1
a
n
_
cos nt sinmt dt
. .
0 (#5)
+
n=1
b
n
_
sinnt sinmt dt
. .
b
n
(#4)
= b
n
=b
n
=
1
f(t) sinmt dt
Example
Find the Fourier series for the following periodic function (f(t+2) = f(t))
f(t) =
_
_
_
0 < t < 0
t
0 < t <
Figure 8.3: Plot of the periodic function f(t).
As shown in Figure 8.3 the period of f(t) is: p = 2. Then, the Fourier
coecients are evaluated as follows
a
0
=
1
2
_
f(t) dt =
1
2
_
0
t
dt =
1
2
_
t
2
2
_
0
=
1
4
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 166
a
n
=
1
f(t) cos nt dt =
1
_
0
t
cos nt dt
=
1
2
_
t
n
sin nt
0
. .
0
1
n
_
0
sin nt dt
_
=
cos nt
n
2
0
=
cos n 1
n
2
2
=
(1)
n
1
n
2
2
=
_
_
_
0, n even
2
2
n
2
, n odd
b
n
=
1
f(t) sin nt dt =
1
_
0
t
sin nt dt
=
1
2
_
t
n
cos nt
0
+
1
n
_
0
cos nt
. .
0
dt
_
=
1
2
_
n
cos n + 0
_
=
(1)
n
n
f(t) = a
0
+
n=1
(a
n
cos nt + b
n
sinnt)
=
1
4
2
n=odd
cos nt
n
2
1
n=1
(1)
n
sint
n
=f(t) =
1
4
2
2
_
cos t +
1
9
cos 3t +
1
25
cos 5t +
_
_
sint +
sin2t
2
sin3t
3
+
_
8.3.3 Functions of any Period p = 2L
Periodic functions rarely have period 2, but often have some other period
p = 2L. If such a function f(t) can be expressed as a Fourier series, it can
be represented as:
f(t) = a
0
+
n=1
_
a
n
cos
_
nt
L
_
+ b
n
sin
_
nt
L
__
where the Fourier coecients are given by
a
0
=
1
2L
_
L
L
f(t) dt, (a)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 167
0
t
g(t)
0
t
f(t)
(a) (b)
a
n
=
1
L
_
L
L
f(t) cos
_
nt
L
_
dt, (b)
b
n
=
1
L
_
L
L
f(t) sin
_
nt
L
_
dt. (c)
8.3.4 Even and Odd Functions
Unnecessary work in determining Fourier coecients of a function can be
avoided if the function is odd or even. A function is even when it satises
the condition f(t) = f(t), and it is odd if g(t) = g(t)
Figure 8.4: Illustration of (a) an even function, and (b) an odd function.
Even function: symmetric about the vertical axis at the origin
_
L
L
f(t)dt = 2
_
L
0
f(t) dt.
Odd function: antisymmetric about the vertical axis at the origin
_
L
L
g(t) dt = 0.
8.3.5 Fourier Series of Even and Odd Functions of Period 2L
Even Function: Fourier Cosine Series
f(t) = a
0
+
n=1
a
n
cos
_
nt
L
_
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 168
f(t)
-T 0 T 2T
A
f(t)-A/2=g(t)
t
-2T
(b)
A/2
t
-A/2
(a)
2T T
0
-T -2T
with coecients
a
0
=
1
L
_
L
0
f(t) dt,
a
n
=
2
L
_
L
0
f(t) cos
_
nt
L
_
dt, (n = 1, 2, ).
Odd Function: Fourier Sine Series
f(t) =
n=1
b
n
sin
_
nt
L
_
,
with coecients
b
n
=
2
L
_
L
0
f(t) sin
_
nt
L
_
dt.
8.3.6 Hidden Symmetry
Often the symmetry of a periodic function is obscured by a constant term,
as shown in Figure 8.5, and the symmetry can be revealed by shifting the
function accordingly.
Figure 8.5: A periodic function with (a) hidden symmetry, and (b) the
corresponding function with odd symmetry.
Example
Find the Fourier series for the following periodic square wave function
f(t) =
_
0 5 < t < 0,
3 0 < t < 5.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 169
t
f(t)
-5
3
5 10 15
t
f(t)-3/2=g(t)
-5
3/2
5 10 15 0
0
-3/2
(a) (b)
Figure 8.6: (a) The periodic function f(t), and (b) the corresponding
function g(t) = f(t) 3/2 with odd symmetry.
Clearly, the period of the function f(t) is p = 10, therefore, p = 2L =
L = 5. Shifting f(t) by -3/2 yields a periodic function with odd symmetry
(g(t) = g(t)). Therefore, Fourier sine series can be employed
g(t) =
n=1
b
n
sin
_
nt
L
_
b
n
=
2
L
_
L
0
g(t) sin
_
nt
L
_
dt =
2
5
_
5
0
3
2
sin
_
nt
5
_
dt
=
3
5
_
5
n
cos
_
nt
5
__
5
0
=
3(1 cos n)
n
=
3[1 (1)
n
]
n
=g(t) =
6
_
sin
t
5
+ 0 +
1
3
sin
3t
5
+ 0 +
1
5
sin
5t
5
+ 0 +
_
also f(t) =
3
2
+ g(t)
=f(t) =
3
2
+
6
_
sin
t
5
+
1
3
sin
3t
5
+
1
5
sin
5t
5
+
_
8.3.7 HalfRange Expansions
In various physical and engineering problems there is practical need to use
Fourier series in connection with functions f(t) that are given merely on
some nite interval. Therefore, a nonperiodic function f(t) dened over a
certain nite interval (0, ) can be expanded into a Fourier series dened
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 170
f(t)
(a) given
2 2
f(t)
(b) even symmetry
cosine terms
2 2
f(t)
(c) odd symmetry
sine terms
t t t
1
/2
f(t)
t
(a)
f(t)
t
/2 /2 0
1
(b)
Figure 8.7: Schematic illustration of the halfrange expansion procedure.
only in the interval (0, ), as shown in Figure 8.7. It is important to let
p = 2.
Example
Given the function
f(t) =
_
_
_
0 0 < t <
2
,
1
2
< t < ,
expand f(t) in a Fourier cosine series and draw the corresponding periodic
extension of f(t).
Figure 8.8: (a) Plot of the function f(t) and (b) the corresponding even
symmetry halfrange expansion.
The Fourier cosine series for f(t) is:
f(t) = a
0
+
n=1
a
n
cos
_
nt
L
_
, L =
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 171
a
0
=
1
L
_
L
0
f(t) dt =
1
_
/2
0
(0) dt +
1
_
/2
(1) dt =
1
_
2
_
=
1
2
a
n
=
2
L
_
L
0
f(t) cos
_
nt
L
_
dt =
2
_
/2
cos nt dt
=
2
n
sinnt
/2
=
2
n
sin
_
n
2
_
=f(t) =
1
2
2
_
cos t
1
3
cos 3t +
1
5
cos 5t
_
8.4 Fourier Integrals
Fourier integrals are extensively used in solving dierential equations. Be-
cause many practical problems do not involve periodic functions, it is de-
sirable to generalize the method of Fourier series to include non periodic
functions.
Outline of the Procedure
(1) consider a periodic function f(t) with period 2L.
(2) let L to yield a nonperiodic function assuming that
f
(t) = lim
L
f(t)
is absolutely integrable on the taxis, that is the following integral
exists:
_
|f
(t)| dt.
Example
Consider the following periodic function with period 2L
f(t) = e
|t|
, L < t < L,
f(t) = f(t + 2L),
sketched in Figure 8.9(a). By setting L yields a nonperiodic function,
as shown in Figure 8.9(b).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 172
-L 0 L
2L
f(t)
t
f*(t)
0
t
(b)
(a)
Figure 8.9: (a) A periodic function and (b) the corresponding nonperiodic
function resulting by taking the limit L .
Derivation of the Fourier Integral
Recall the denition of Fourier series,
f(t) = a
0
+
n=1
(a
n
cos
n
t + b
n
sin
n
t), where
n
=
n
L
, p = 2L,
a
0
=
1
2L
_
L
L
f(t) dt,
a
n
=
1
L
_
L
L
f(t) cos
n
t dt,
b
n
=
1
L
_
L
L
f(t) sin
n
t dt.
Substitute the expressions for the Fourier coecients a
0
, a
n
and b
n
into the
Fourier series relationship and let be a dummy integration variable. The
resulting expression is:
f(t) =
1
2L
_
L
L
f() d +
1
L
n=1
_
cos
n
t
_
L
L
f() cos
n
d
+ sin
n
t
_
L
L
f() sin
n
d
_
.
Now introduce
=
n+1
n
=
(n + 1)
L
n
L
=
L
=
1
L
=
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 173
=f(t) =
1
2L
_
L
L
f() d
. .
0 at L
+
1
L
n=1
_
cos
n
t
_
L
L
f() cos
n
d
+ sin
n
t
_
L
L
f() sin
n
d
_
.
Now let
L =
1
L
0 = =
L
0,
n=1
g(
n
)
_
0
g() d.
Therefore, the innite series becomes an integral from 0 to ,
f
(t) =
_
0
[A() cos t + B() sint] d Fourier integral
A() =
1
() cos d,
B() =
1
() sin d,
where the superscript
indicates nonperiodic function (L ).
Conditions for the Validity of f
(t)
The function f
(t) must be piecewise continuous in every nite interval and
has righthand and lefthand derivatives at every point. At a point where
f(t) is discontinuous the value of the Fourier integral equals the average of
the left and righthand limits of f(t) at that point.
8.4.1 Fourier Cosine and Sine Integrals
If f(t) is an even function then B() = 0, because
_
L
L
f(even) sin
. .
odd
= 0, and
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 174
1
-1
1
f(x)
x
f(t) =
_
0
A() cos t d, Fourier cosine integral
A() =
2
_
0
f() cos d.
If f(t) is an odd function then A() = 0, because
_
L
L
f(odd) cos
. .
odd
= 0, and
f(t) =
_
0
B() sint d, Fourier sine integral
B() =
2
_
0
f() sin d.
Example
Find the Fourier integral of the following function, which is also illustrated
in Figure 8.10,
f(x) =
_
_
_
1 |x| < 1,
0 |x| > 1.
Figure 8.10: Graphical representation of the function f(t).
Given that f(x) is an even function, that is [f(x) = f(x)], then B() = 0
and
A() =
2
_
0
f() cos d =
2
_
1
0
(1) cos d
=
2 sin
1
0
=
2 sin
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 175
f(x) =
_
0
A() cos x d =
2
_
0
sin cos x
d.
Use in Integral Evaluation
From the previous relationship it follows that
_
0
sin cos x
d =
2
f(x) =
_
2
0 x < 1,
4
x = 1,
0 x > 1,
recall that f(x) =
_
_
1 0 x < 1,
1 + 0
2
=
1
2
x = 1, (note the discontinuity)
0 x > 1.
8.4.2 Fourier Transformations
Fourier Cosine Transformations
For an even function f(t) the following expressions are applicable
f(t) =
_
0
A() cos t d, A() =
2
_
0
f() cos d.
Conventionally, we let
A() =
_
2
f
c
(),
where the subscript c indicates cosine, in order to obtain the following pair
of equations
f
c
() =
_
2
_
0
f(t) cos t dt Fourier cosine transform
f(t) =
_
2
_
0
f
c
() cos t d Inverse Fourier cosine transform
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 176
Fourier Sine Transformations
For an odd function f(t) the following expressions are applicable
f(t) =
_
0
B() sint d, B() =
2
_
0
f() sin d.
Conventionally, we let
B() =
_
2
f
s
(),
where the subscript s indicates sine, in order to obtain the following pair
of equations
f
s
() =
_
2
_
0
f(t) sint dt Fourier sine transform
f(t) =
_
2
_
0
f
s
() sint d Inverse Fourier sine transform
Other Notations
F
c
[f(t)] = F
c
() =
f
c
(), F
1
c
[F
c
()] = f(t),
F
s
[f(t)] = F
s
() =
f
s
(), F
1
s
[F
s
()] = f(t).
Example 1 (Kreyszig, 1993, p. 608)
Find the Fourier cosine and sine transforms of the function
f(x) =
_
k 0 < x < a,
0 x > a.
f
c
() =
_
2
_
0
f(x) cos x dx
=
_
2
_
a
0
k cos x dx = k
_
2
sinx
a
0
= k
_
2
sina
f
s
() =
_
2
_
0
f(x) sinx dx
=
_
2
_
a
0
k sinx dx = k
_
2
cos x
a
0
= k
_
2
_
cos a 1
_
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 177
It should be noted that for f(x) = k is constant in the range 0 < x <
these transforms do not exist because (f() = 0) .
Linearity of Fourier Sine and Cosine Transforms
F
c
{af(t) + bg(t)} = a
f
c
() + b g
c
(),
F
s
{af(t) + bg(t)} = a
f
s
() + b g
s
().
Sine and Cosine Fourier Transform of Derivatives
Let f(t) be continuous, f
(t) piecewise continuous, and f() 0.
F
c
{f
(t)} =
_
2
_
0
f
(t) cos t dt
=
_
2
_
f(t) cos t
0
+
_
0
f(t) sint dt
_
=
_
2
f(0) + F
s
{f(t)}
_
_
Integration by Parts :
_
u dv = uv
_
v du,
u = cos t, du = sint, dv = f
(t) dt, v = f(t).
_
_
F
s
{f
(t)} =
_
2
_
0
f
(t) sint dt
=
_
2
_
f(t) sint
_
0
f(t) cos t dt
_
= F
c
{f(t)}
Second Derivatives
Following the same procedure as for the rst derivatives but with f
instead
f yields
F
c
{f
(t)} =
_
2
(0) + F
s
{f
(t)}
=
_
2
(0) + [F
c
{f(t)}]
. .
F
s
{f
(t)}
=
_
2
(0)
2
F
c
{f(t)}
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 178
Similarly we obtain
F
s
{f
(t)} =
_
2
f(0)
2
F
s
{f(t)}
8.4.3 Fourier Transformation (Complex Form)
Recall the denition of the (real) Fourier integral
f(t) =
_
0
[A() cos t + B() sint] d,
A() =
1
f() cos d,
B() =
1
f() sin d.
Substituting the expressions for A() and B() into the Fourier integral
yields
f(t) =
1
_
0
_
f() [cos cos t + sin sint] d d
=
1
_
0
_
f() cos(t ) d d
=
1
2
_
f() cos(t ) d d
+
j
2
_
f() sin(t ) d d,
where j =
1, and the following relationships involving the cosine (an
even function) were employed
cos(a b) = cos a cos b + sina sinb,
_
0
cos () d =
1
2
_
cos () d.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 179
It should be noted that the added last term (complex term) in the previous
expression for f(t) does not change the equality, because
_
f() sin(t
) d = G() is an odd function of , and
_
G() d = 0.
=f(t) =
1
2
_
f()[cos(t ) + j sin(t )] d d
=
1
2
_
f()e
j(t)
d d
=
1
2
_
_
1
2
_
f()e
j
d
_
. .
f()
e
jt
d,
where the Euler Formula was employed
e
jt
= cos t + j sint.
Therefore, the Fourier Transform Pair is given by
f() =
1
2
_
f(t)e
jt
dt Fourier transform,
f(t) =
1
2
_
f()e
jt
d Inverse Fourier transform.
Other Commonly Used Notations
f() =
_
f(t)e
jt
dt,
f(t) =
1
2
_
f()e
jt
d.
Compare with the denition of the Laplace transform
L{f(t)} = F(s) =
_
0
e
st
f(t) dt,
f(t) =
1
2j
_
c
e
st
F(s) ds.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 180
8.5 Properties of Fourier Transformations
8.5.1 Linearity
If F{f
1
(t)} =
f
1
() and F{f
2
(t)} =
f
2
(), then
F{af
1
(t) + bf
2
(t)} = a
f
1
() + b
f
2
().
8.5.2 Time Shifting
F{f(t t
o
)} =
f()e
jt
o
Proof
F{f(t t
o
)} =
_
f(t t
o
)e
jt
dt, let t t
o
= x dt = dx
F{f(x)} =
_
f(x)e
jw(t
o
+x)
dx
= e
jt
o
_
f(x)e
jx
dx
= e
jt
o
f()
8.5.3 Frequency Shifting
F
_
f(t)e
j
o
t
_
=
f(
o
)
Proof
F
_
f(t)e
j
o
t
_
=
_
[f(t)e
j
o
t
]e
jt
dt
=
_
f(t)e
j(
o
)t
dt
=
f(
o
)
8.5.4 Scaling
F{f(at)} =
1
|a|
f
_
a
_
(a > 0 and real)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 181
Proof
For a > 0:
F{f(at)} =
_
f(at)e
jt
dt, let at = x, t =
x
a
dt =
dx
a
=
1
a
_
f(x)e
j(
a
)x
dx
=
1
a
f
_
a
_
()
For a < 0:
F{f(at)} =
_
f(at)e
jt
dt, let at = x,
=
1
a
_
f(x)e
j(
w
a
)x
dx
(Note the sign change of the integral limits due to a < 0)
=
1
a
_
f(x)e
j(
w
a
)x
dx
=
1
a
f
_
a
_
()
In view of () and () we conclude that
F{f(at)} =
1
|a|
f
_
a
_
8.5.5 TimeReversal
F{f(t)} =
f()
Proof
F{f(t)} = F{f(at)} =
f
_
a
_
=
f()
8.5.6 Modulation Theorem
F{f(t) cos
o
t} =
1
2
f(
o
) +
1
2
f( +
o
)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 182
Proof
F{f(t) cos
o
t} = F
_
1
2
f(t)e
j
o
t
+
1
2
f(t)e
j
o
t
_
=
1
2
F
_
f(t)e
j
o
t
_
+
1
2
F
_
f(t)e
j
o
t
_
=
1
2
f(
o
) +
1
2
f( +
o
).
where the frequency shifting property and the following trigonometric iden-
tity were employed
cos
o
t =
1
2
_
e
j
o
t
+ e
j
o
t
.
8.5.7 Additional Properties when f(t) is Real
If f(t) is real, let
f(t) = f
e
(t)
..
even
+f
o
(t)
. .
odd
and
f() = R()
. .
real
+ jX(w)
. .
imaginary
then
R() =
_
f(t) cos t dt, (a)
X() =
_
f(t) sint dt, (b)
R() = R(), (c)
X() = X(), (d)
f() =
f
() (
indicates complex conjugation), (e)
F{f
e
(t)} = R(), (f)
F{f
o
(t)} = jX(). (g)
Proof
f() =
_
f(t)e
jt
dt
=
_
f(t) cos t dt j
_
f(t) sint dt
= R() + jX(). (a&b)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 183
R() =
_
f(t) cos(t)dt =
_
f(t) cos t dt = R(). (c)
X() =
_
f(t) sin(t)dt =
_
f(t) sint dt = X(). (d)
Given that R() is an even function and X() is an odd function, then
f() = R() + jX() = R() jX(w) =
f
(). (e)
Given that any function can be expressed as the sum of an even and an
odd component, then (Hsu, 1984, p.30)
f(t) = f
e
(t) + f
o
(t),
where
f
e
(t) =
1
2
[f(t) + f(t)],
f
o
(t) =
1
2
[f(t) f(t)].
It can be shown that
F{f(t)} =
f() = R() + jX(),
F{f(t)} =
f() = R() jX() =
f
(),
then
F{f
e
(t)} =
1
2
f() +
1
2
()
. .
f()
=
1
2
[R() + jX()] +
1
2
[R() jX()]
= R(). (f)
F{f
o
(t)} =
1
2
f()
1
2
()
=
1
2
[R() + jX()]
1
2
[R() jX()] = jX(). (g)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 184
8.5.8 Dierentiation and Integration Theorems
F {f
(t)} = jF{f(t)} Time domain dierentiation (a)
F
_
f
(n)
(t)
_
= (j)
n
f() = (j)
n
F{f(t)} (b)
F{jtf(t)} =
f
() Frequency domain dierentiation (c)
if
_
f(t)dt =
f(0) = 0, F
__
t
f(x) dx
_
=
1
j
f() (d)
Proof
F {f
(t)} =
_
(t)e
jt
dt
= f(t)e
jt
+ j
_
f(t)e
jt
dt
= j
_
f(t)e
jt
dt [f() 0]
= j
f() (a)
Recall
f() =
_
f(t)e
jt
dt
=
d
f()
d
=
d
d
_
f(t)e
jt
dt
=
_
f(t)
d
d
_
e
jt
_
dt
=
_
[jtf(t)]e
jt
dt
= F{jtf(t)} (c)
Consider the following function
(t) =
_
t
f(x) dx,
(t) = f(t), F{(t)} =
()
=
() = F
__
t
f(x) dx
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 185
F{
(t)} = F{f(t)}, F {
(t)} = j
() =F{f(t)} = j
()
=
() =
1
j
F{f(t)} =
1
j
f()
=F
__
t
f(x) dx
_
=
1
j
f() (d)
8.5.9 Multidimensional Fourier Transforms
ThreeDimenional Fourier transform pair
f(u, v, w) =
_
f(x, y, z)e
j(ux+vy+wz)
dx dy dz,
f(x, y, z) =
1
(2)
3
_
f(u, v, w)e
j(ux+vy+wz)
du dv dw.
8.5.10 Convolution
F{f(t) g(t)} =
f() g(), or
F
1
{
f() g()} = f(t) g(t).
It should be noted that for the denition presented by Kreyszig [1993] the
convolution is dened as follows
F{f(t) g(t)} =
f() g().
Proof
F{f(t) g(t)} =
_
__
f(x)g(t x) dx
_
. .
f(t)g(t)
e
jt
dt
=
_
f(x)
__
g(t x)e
jt
dt
_
dx
_
Time shifting : F{f(t t
o
)} =
f()e
jt
o
_
=
_
f(x) g()e
jx
dx
=
__
f(x)e
jx
dx
_
g()
=
__
f(t)e
jt
dt
_
g()
=
f() g()
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 186
f(t)
1
-T/4 -T/2 T/4 T/2
-1
t
0
8.5.11 Frequency Convolution
F
1
{
f() g()} = 2f(t)g(t),
F{f(t)g(t)} =
1
2
f() g() =
1
2
_
f(y) g( y) dy.
Proof
F
1
{
f() g()} = F
1
__
f(y) g( y)dy
_
=
1
2
_
__
f(y) g( y) dy
_
e
jt
d
_
let y = x
_
=
1
2
_
f(y)
__
g(x)e
j(x+y)t
dx
_
dy
_
interchange order of integration
_
= 2
_
1
2
_
f()e
jt
d
_
_
1
2
_
g()e
jt
d
_
= 2[f(t)g(t)]
8.6 Exercises
(1) Find the period of the function f(t) = (10 cos t)
2
.
(2) Find the Fourier series for the function whose waveform is (Hint: P =
T [T/2, T/2])
Figure 8.11: Illustration of the function described in Exercise (2).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 187
1
f(t)
-T 0 T
t
1
0 T
t
f(t)
-T
(3) Find the Fourier series for the function (P = T)
Figure 8.12: Schematic illustration of the function for Exercise (3).
(4) Using the result of Exercise 3, nd the Fourier series for the function
f(t) shown below
Figure 8.13: Schematic illustration of the desired function f(t).
(5) Given the function f(t) =
_
0 0 < t <
2
,
1
2
< t < ,
expand f(t) in a Fourier
sine series and draw the corresponding periodic extension of f(t).
(6) Find the Fourier transform of p(t) =
_
1 |t| <
d
2
,
0 |t| >
d
2
.
(7) Find the Fourier transform of f(t) = e
a|t|
, where a > 0.
(8) If
_
0
f(x) cos axdx =
_
1 a 0 a 1,
0 a > 1,
nd f(x).
(9) Show that
_
0
sin
2
u
u
2
du =
2
given that
_
0
f(x) cos ax dx =
_
1 a 0 a 1,
0 a > 1.
(10) If F
_
f(t)
_
=
f() and
f() can be dierentiated everywhere n times,
show that
F
_
t
p
f(t)
_
=
1
(j)
p
d
p
f()
d
p
for every p n.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 188
Chapter 9
Partial Dierential Equations
9.1 Classication of 2ndOrder Partial Dierential Equations
The general linear partial dierential equation of order two in two indepen-
dent variables has the form:
A
2
u
x
2
+B
2
u
xy
+C
2
u
y
2
+D
u
x
+E
u
y
+Fu = G, ()
where A, B, C, D, E, F and G may depend on x and y but not on u.
A secondorder equation with independent variables x and y which does
not have the form (*) is called nonlinear.
If G = 0, (*) is homogeneous.
If G = 0, (*) is nonhomogeneous.
Because of the nature of the solutions of (*) the equation is often classied
as:
Elliptic: B
2
4AC < 0,
Parabolic: B
2
4AC = 0,
Hyperbolic: B
2
4AC > 0.
Examples
(a)
2
x
2
+
2
y
2
= 0,
A = 1,
B = 0, B
2
4AC = 4 < 0 = Elliptic
C = 1,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 189
(b)
u
t
= k
2
u
x
2
,
A = k,
B = 0, B
2
4AC = 0 = Parabolic
C = 0,
9.2 Method of Separating Variables (Product Method)
Procedure:
(1) Assume that the solution for the dependent variable (or variables) exists
as a product of functions, each of which is a function of only one of the
independent variables. For example,
u(x, y, t) = X(x) Y (y) T(t).
It should be noted that it is customary to use capital letters for the func-
tions, and small letters for their arguments.
(2) Manipulate the equation to separate terms that depend upon each of the
variables from one another. This leads to a situation where the equation
requires that a function of one independent variable must be equal to a
function of another independent variable, for any arbitrary values of the
two independent variables. The only way that this can be true is for the
functions to be constants.
(3) Solve the ordinary dierential equation for the assumed functions X(x),
Y (y), etc., in which the separation constant appears.
(4) Determine the separation constant (or eigenvalue) from the boundary
conditions.
Example
Solve the following boundaryvalue problem
u
x
= 4
u
y
, ()
u(0, y) = 8e
3y
. ()
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 190
Assume a solution of the form
u(x, y) = X(x) Y (y)
and substitute into (*) to yield
X
(x) Y (y) = 4X(x) Y
(y)
=
X
4X
=
Y
Y
.
Since the lefthand side is a function of x alone, and the righthand side
depends upon y only, and x and y are independent variables that may have
any values, the preceding equation can only be true if each side is (the
same) constant.
=
X
4X
=
Y
Y
= C,
X
= 4CX =X = Ae
4Cx
,
Y
= CY =Y = Be
Cy
,
=u(x, y) =
_
Ae
4Cx
_ _
Be
Cy
_
= e
C(4x+y)
,
where = AB. Using the boundary condition
u(0, y) = e
Cy
= 8e
3y
= 8, C = 3,
=u(x, y) = 8e
3(4x+y)
=u(x, y) = 8e
12x3y
9.2.1 Vibration of a String (Kreyszig, 1993, p. 631)
The equation describing the smallamplitude motion of a taut string is the
wave equation
2
u
xx
u
tt
= 0,
where
2
is a physical constant that depends on the string tension and
mass per unit length. For the case illustrated in Figure 9.1 the appropriate
boundary conditions are:
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 191
-1
-0.5
0
0.5
1
0
2
.
5
5
7
.
5
1
0
u( x , t )
L
Figure 9.1: An illustration of a vibrating string with length L.
u(0, t) = 0,
u(L, t) = 0.
Assume a solution of the form
u(x, t) = X(x) T(t),
and substitute into the governing dierential equation to obtain
2
X
T X T
= 0
=
X
X
=
T
2
T
= k,
X
kX = 0,
k is still arbitrary.
T
k
2
T = 0,
It should be noted that an artistic choice is to set k = p
2
.
Satisfying the Boundary Conditions
u(0, t) = X(0) T(t) = 0 X(0) = 0,
u(L, t) = X(L) T(t) = 0 X(L) = 0.
Consider the case of k = 0:
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 192
X
= 0 =X = C
1
x +C
2
,
X(0) = 0 =C
2
= 0,
X(L) = C
1
L = 0 =C
1
= 0,
=u(x, t) = 0.
Therefore, k is not a good choice since u(x, t) = 0.
Consider the Case of k = p
2
:
X
p
2
X = 0, r = p
=X(x) = Ae
px
+Be
px
.
From the boundary conditions we have
X(0) = 0 = A+B,
X(L) = 0 = Ae
pL
+Be
pL
,
=A = B = 0
=X(x) = 0
=u(x, t) = 0.
Therefore, k = p
2
is not a good choice.
Obviously, k = p
2
is the appropriate choice. Note that the problem
describes traveling waves, so the solution is expected to be in terms of sines
and cosines. Starting with the X(x) dierential equation we have
X
+p
2
X = 0 =X(x) = Acos px +Bsinpx.
Employing the X boundary condition yields
X(0) = 0 = Acos(0) +Bsin(0) =A = 0,
X(L) = 0 = BsinpL,
=sinpL = 0
=pL = n
=p =
n
L
(n = 1, 2, 3, )
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 193
-1.5
-1
-0.5
0
0.5
1
1.5
0
2
.
5
5
7
.
5
1
0
mode 1
2
3
L
Figure 9.2: The rst three modes of a vibrating string with length L.
=X
n
(x) = Bsin
_
n
L
x
_
innitely many solutions.
Now solve the T(t) dierential equation
T
k
2
T = 0,
k = p
2
=
_
n
L
_
2
,
let
n
=
n
L
,
=T
+
2
n
T = 0
=T =
n
cos
n
t +
n
sin
n
t
=u
n
(x, t) = Bsin
_
nx
L
_
[
n
cos
n
t +
n
sin
n
t] .
Also, assume B = 1. It should be noted that u
n
represents a harmonic
motion having the frequency
n
2
=
n
2L
cycles per unit time. This motion is
called the nth normal mode of the string. The nth normal mode has n 1
nodes, that is points of the string that do not move (see Figure 9.2). Note
that
sin
nx
L
= 0 at x =
L
n
,
2L
n
, ,
n 1
n
L.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 194
-1.5
-1
-0.5
0
0.5
1
1.5
0
2
.
5
5
7
.
5
1
0
0
L
x
Figure 9.3: Halfrange expansion of f(x).
For example, for n = 3
sin
nx
L
= 0 at x =
L
3
,
2L
3
.
Case 1
Initial Conditions
u(x, 0) = f(x)
u(x, 0)
t
= g(x) (interpretation : string velocity)
In general, a single solution u
n
(x, t) will not satisfy the initial conditions.
Now, since the fundamental equation is linear and homogeneous, the sum
of innitely many solutions u
n
is also a solution. Therefore,
u(x, t) =
n=1
u
n
(x, t) =
n=1
sin
_
nx
L
_
[
n
cos
n
t +
n
sin
n
t] .
Employing the rst initial condition
u(x, 0) =
n=1
n
sin
_
nx
L
_
= f(x). (Fourier sine series)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 195
Note that
n
must be chosen so that u(x, 0) becomes a halfrange expansion
of f(x), namely, the Fourier sine series of f(x);
n
=
2
L
_
L
0
f(x) sin
nx
L
dx, (Fourier coecients)
u(x, 0)
t
=
_
n=1
sin
_
nx
L
_
{
n
n
sin
n
t +
n
n
cos
n
t}
_
t=0
=
n=1
n
sin
nx
L
= g(x),
=
n
n
=
2
L
_
L
0
g(x) sin
nx
L
dx, (half range expansion)
n
=
n
L
,
=
n
=
2
n
_
L
0
g(x) sin
nx
L
dx. ()
Case 2
For the case of zero initial string velocity, g(x) = 0, then
u(x, 0)
t
=
n=1
n
sin
nx
L
= 0 =
n
= 0,
which can also be obtained from (*) with g(x) = 0.
=u(x, t) =
n=1
n
cos
n
t sin
nx
L
,
n
=
n
L
,
sinxcos y =
1
2
[sin(x +y) + sin(x y)]
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 196
f(x) f(x-t)
t
x
Figure 9.4: Traveling wave.
=u(x, t) =
1
2
n=1
n
_
sin
_
n(x +t)
L
_
+ sin
_
n(x t)
L
__
,
recall that
f(x) =
n=1
n
sin
nx
L
,
=u(x, t) =
1
2
[f(x +t) +f(x t)]
For ( > 0) the function f(x + t) represents a traveling wave to the left
with increasing time and f(x t) represents a traveling wave to the right
as illustrated in Figure 9.4.
9.2.2 OneDimensional Acoustic Vibrations (Reynolds, 1981)
The derivation of the uid pressure from ambient during 1D acoustic vi-
brations is also described by the wave equation
c
2
2
p
x
2
2
p
t
2
= 0,
where c is the speed of sound in the uid. The lateral velocity u associated
with acoustic motions is related to the pressure eld by
u
t
=
p
x
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 197
where is the uid density. As an example, lets consider the case of a tube
closed at x = 0 and open at x = L, and seek the normal modes of acoustic
vibration for this case
p
x
= 0 at x = 0,
p = 0 at x = L.
Assume a solution of the form
p(x, t) = X(x) T(t).
Substituting into the wave equation yields
c
2
X
X
=
T
T
= w
2
,
where the constant
2
was selected for the same reasons as in the previous
example. Consequently, the following two ordinary dierential equations
are obtained
T
+w
2
T = 0,
X
+
2
X = 0,
where
=
w
c
,
=X = c
1
sin(x) +c
2
cos(x).
From the rst boundary condition
p(0, t)
x
= X
(0) T(t) = 0 X
(0) = 0,
X
(0) = c
1
cos(0) c
2
sin(0) c
1
= 0.
From the second boundary condition we get
X(L) T(t) = 0 X(L) = 0,
X(L) = c
2
cos(L) c
2
cos(L) = 0
L =
2
,
3
2
,
L = (2n 1)
2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 198
n
= (2n 1)
2L
=X
n
= c
2
cos(
n
x).
Solving the dierential equation for T yields
T
+w
2
T = 0 =T
n
= A
1
cos(w
n
t) +A
2
sin(w
n
t).
Therefore, the solution for the pressure eld is
=p(x, t) = cos(
n
x)[A
1
cos(w
n
t) +A
2
sin(w
n
t)],
where A
i
= A
i
c
2
. We can now calculate the velocity eld associated with
each eigenmode
u
t
=
p
x
=
x
{cos(
n
x) [A
1
cos(w
n
t) +A
2
sin(w
n
t)]}
=
n
sin(
n
x) [A
1
cos(w
n
t) +A
2
sin(w
n
t)] ,
integrating yields
=u(x, t) =
n
w
n
sin(
n
x) [A
1
sin(w
n
t) A
2
cos(w
n
t)] ,
w
n
=
n
c,
=u(x, t) =
1
c
sin(
n
x) [A
1
sin(w
n
t) A
2
cos(w
n
t)] .
The constant of integration must be zero for the uid to remain motionless
at the closed end (at u(0, t) = 0, sin(0) = 0 const. = 0). Also, note
that the nodes of p at points with zero pressure uctuations are also the
antinodes of u (points where the u eld has maximum amplitude).
An Application of this Theory
Suppose you are trying to reduce the noise present in a long room in which
the acoustic motions of this type occur to bother the occupants.
One solution is to damp the motions by providing a ne brous ma-
terial that will oppose the uid motion through viscosity. Obviously, the
best place to locate this material is where the uid velocity is greatest (a
u antinode). The material would have little eect if placed at a velocity
node. This means that the material to quiet the room should be placed at
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 199
z
r
r
o
L/2
-L/2
0
a node in the pressure eld, i.e., where the sound you are trying to kill can
not be heard.
It should be noted that in actual situations the acoustic eld is much
more complicated. However, it is in general true that placing the acoustic
damping material away from solid walls, out in the room where the air can
move through it, is most eective.
9.2.3 Nuclear Reactor Criticality
A very simple but conceptually useful model for the neutron density in a
nuclear reactor is that the neutron density is described by
2
+
2
= 0,
where
2
=
rr
+
1
r
r
+
1
r
2
+
zz
,
2
depends upon the reactor size and design and the position of the control
rods. For a cylindrical reactor, the boundary conditions are:
z
= 0 at z = 0, (1)
r
= at r = r
o
, (2)
z
= at z = L/2. (3)
The rst condition is a symmetry relationship and the last two conditions
equate the neutron diusive ux at the outer surface to the diusive loss
through shielding.
Figure 9.5: Schematic diagram of a simplied nuclear reactor.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 200
Note that the lowest value of (lowest eigenvalue) determines the
critical mass of the reactor. The objective of our analysis is therefore to
calculate .
We seek axisymmetric eigensolutions, consequently, we drop depen-
dence and assume a solution of the form
(r, z) = R(r) Z(z).
Substituting into the governing equation and separating the variables yields
R
+
1
r
R
R
=
_
Z
Z
+
2
_
=
2
.
The constant
2
was selected because it will lead to positive real .
ZSolution
Z
+ (
2
2
)Z = 0,
2
=
2
2
,
=Z
+
2
Z = 0, = Z = c
1
sin(z) +c
2
cos(z).
From boundary condition (1)
z
(r, 0) = 0 c
1
= 0.
From boundary condition (3)
Z
+Z = 0 at z =
L
2
,
sin
_
L
2
_
+ cos
_
L
2
_
= 0
=
= tan
_
L
2
_
=
_
L
2
__
2
L
_
.
The preceding equation is a transcendental equation and denes an eigen-
value problem for . The parameter can be determined graphically from
the intersection of the curves tan(L/2) and (/2)(2/L) as a function of
L/2.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 201
-1.5
-1
-0.5
0
0.5
1
0 3 6 9
J
o
(z)
Y
o
(z)
z
RSolution
R
+
1
r
R
+
2
R = 0
=r
2
d
2
R
dr
2
+r
dR
dr
+r
2
2
R = 0.
This ordinary dierential equation looks like Bessels equation
r
2
d
2
R
dr
2
+r
dR
dr
+
_
r
2
2
_
R = 0.
However, the solution to the R problem can be obtained directly from
Abramowitz and Stegun (1965, eq. 9.1.52)
w
2 1
z
w
+
2
w = 0,
w = z
(z),
w = z
{AJ
(z) +BY
(z)}.
Therefore, the Rsolution is of the form
R = B
1
J
o
(r) +B
2
Y
o
(r).
Because Y
o
(0) = (see Figure 9.6), then B
2
= 0 and
=R = B
1
J
o
(r).
Figure 9.6: Graphical representation of the Bessel functions J
0
(z) and Y
o
(z).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 202
From the boundary condition (2)
R
(r
o
) = R(r
o
)
Recall : J
o
(x) = J
1
(x)
=B
1
[J
1
(r
o
) +J
o
(r
o
)] = 0
=J
1
(r
o
) +J
o
(r
o
) = 0
=r
o
J
1
(r
o
) +r
o
J
o
(r
o
) = 0
=J
o
(x) +xJ
1
(x) = 0,
where
= r
o
, and x = r
o
.
Using appropriate tables (i.e. Table 9.7 from Abramowitz and Stegun,
1965) determine the roots. For example, for
r
o
= 0.2 r
o
= 0.6170
Finally, we can calculate since we know
graphically
from tables, and
2
=
2
+
2
9.3 Laplace Transformation Applied to the Solution of
Partial Dierential Equations
Procedure
(1) L{Partial dierential equation} Ordinary dierential equation,
(2) Solve the ordinary dierential equation in Laplace space,
(3) Invert.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 203
Example 1
Apply the Laplace transformation method to solve the following rstorder
partial dierential equation
c
x
+x
c
t
= 0,
subject to the initial and boundary conditions:
c(x, 0) = 0,
c(0, t) = t.
Take Laplace transform with respect to t
d c(x, s)
dx
+x{s c(x, s) c(x, 0)} = 0
=
d c
dx
+xs c = 0.
This is a rstorder ordinary dierential equation with nonconstant coe-
cients, which has the following solution
_
d c
c
+
_
xs dx = A(s) =ln c +
x
2
s
2
= A(s)
= c(x, s) = A
(s) exp
_
x
2
2
s
_
,
where A
(s) = exp[A(s)]. Take Laplace transform of the boundary condi-
tion to yield
c(0, s) =
1
s
2
.
In view of the last two expressions it is clear that
A
(s) =
1
s
2
.
Consequently,
c =
1
s
2
exp
_
x
2
2
s
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 204
=c(x, t) = L
1
_
1
s
2
exp
_
x
2
2
s
__
,
L
1
_
1
s
2
_
= t,
L
1
_
f(s)e
s
_
=
_
_
_
f(t ) t > ,
0 t < ,
=c(x, t) =
_
_
t
x
2
2
t >
x
2
2
,
0 t <
x
2
2
.
Example 2
A semiinnite solid x > 0 is initially at temperature zero. At time t = 0, a
constant temperature U
o
> 0 is applied and maintained at the face x = 0.
Find the temperature at any point of the solid at any later time t > 0.
U
t
= k
2
U
x
2
, x > 0, t > 0
U(x, 0) = 0, I.C. :
U(0, t) = U
0
, |U(x, t)| < M. B.C. :
It should be noted that the restriction of the boundary condition expresses
the requirement that the temperature must be bounded for all x and t.
Taking Laplace transform with respect to t yields
s
U(x, s) U(x, 0) = k
d
2
U(x, s)
dx
2
=
d
2
U(x, s)
dx
2
s
k
U = 0
=
U(x, s) = c
1
(s)e
s
k
x
+c
2
(s)e
s
k
x
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 205
Because
U(x, s) is required to be bounded, c
1
= 0 so that
U(, s) is also
bounded. Consequently,
=
U(x, s) = c
2
e
s
k
x
.
Taking Laplace transform of the boundary condition yields
U(0, s) =
U
o
s
=c
2
=
U
o
s
=
U(x, s) =
U
o
s
e
s
k
x
=U(x, t) = L
1
_
U
o
s
e
s
k
x
_
L
1
_
e
s
s
_
= erfc
_
2
t
_
=U(x, t) = U
o
erfc
_
x
2
kt
_
Example 3
Rework the previous problem if at t = 0 the temperature applied is given
by G(t) for t > 0,
U
t
= k
2
U
x
2
, x > 0, t > 0
U(x, 0) = 0, I.C. :
U(0, t) = G(t), |U(x, t)| < M. B.C. :
Following the procedure outlined in the previous example we can show that
U(x, s) = c
2
e
s
k
x
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 206
and taking Laplace transform of the boundary condition yields
U(0, s) =
G(s)
=c
2
=
G(s)
U(x, s) =
G(s)e
s
k
x
.
Using the convolution theorem yields
U(x, t) = L
1
_
e
s
k
x
_
L
1
{
G(s)}
L
1
_
e
a
s
_
=
a
2
t
3
2
e
a
2
4t
L
1
_
e
s
k
x
_
=
x
2
k
t
3
2
e
x
2
4kt
=U(x, t) =
_
t
0
x
2
k
u
3
2
e
x
2
4ku
G(t u) du
Example 4
Solve by Laplace transforms the following boundary value problem
U
t
= 4
2
U
x
2
,
U(x, 0) = 10 sin2x 6 sin4x, I.C. :
U(0, t) = 0, B.C.1 :
U(3, t) = 0. B.C.2 :
Taking Laplace transform with respect to t leads to
s
U(x, s) U(x, 0) = 4
d
2
U(x, s)
dx
2
,
and employing the initial condition yields
4
d
2
U
dx
2
s
U = 10 sin2x + 6 sin4x. ()
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 207
Homogeneous solution:
U
H
= Ae
s
2
x
+Be
s
2
x
,
where the unknown coecients A and B are obtained by the method of
undetermined coecients. Assume
U
P
= A
sin2x +B
cos 2x +C
sin4x +D
cos 4x,
=
U
P
=4
2
A
sin2x 4
2
B
cos 2x
16
2
C
sin4x 16
2
D
cos 4x
Substituting into (*) yields
B
= D
= 0,
A
=
10
s + 16
2
,
C
=
6
s + 64
2
.
=
U =
U
H
+
U
P
= Ae
s
2
x
+Be
s
2
x
+
10 sin2x
s + 16
2
6 sin4x
s + 64
2
.
B.C.1 :
U(0, s) = 0 = A+B,
B.C.2 :
U(3, s) = 0 = Ae
3
2
s
+Be
3
2
s
,
=A = B = 0.
=
U(x, s) =
10 sin2x
s + 16
2
6 sin4x
s + 64
2
=U(x, t) = L
1
_
10 sin2x
s + 16
2
_
L
1
_
6 sin4x
s + 64
2
_
=U(x, t) = 10 sin(2x)e
16
2
t
6 sin(4x)e
64
2
t
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 208
9.4 Fourier Transformations Applied to the Solution of
Partial Dierential Equations
Procedure
(1) F{Partial dierential equation} Ordinary dierential equation,
(2) Solve the ordinary dierential equation in Fourier space,
(3) Invert.
Example 1
Find the solution to the following boundary value problem describing the
temperature distribution in an innite homogeneous rod
u(x, t)
t
= c
2
2
u(x, t)
x
2
, (Heat equation)
u(x, 0) = f(x),
u(, t) 0,
u(, t)
x
0.
First recall the following Fourier transform pair and relationship:
f(w) =
_
f(x)e
jwx
dx,
f(x) =
1
2
_
f(w)e
jwx
dw,
F{f
(x)} = w
2
f(w).
Taking Fourier transform with respect to x yields
d u(w, t)
dt
= c
2
w
2
u(w, t) First order O.D.E.
= u(w, t) = A(w)e
c
2
w
2
t
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 209
I.C. u(w, 0) =
f(w),
=A(w) =
f(w) = u(w, t) =
f(w)e
c
2
w
2
t
u(x, t) = F
1
_
f(w)e
c
2
w
2
t
_
=
1
2
_
f(w)e
c
2
w
2
t
e
jwx
dw
where
f(w) =
_
f()e
jw
d
=u(x, t) =
1
2
_
f()
__
e
c
2
w
2
t
e
j(wxw)
dw
_
d.
Note that the bracketed integral in the preceding equation can be rewritten
as follows
_
{e
c
2
w
2
t
cos(wx w) +je
c
2
w
2
t
sin(wx w)
. .
Odd Function
} dw
=
_
e
c
2
w
2
t
cos(wx w) dw
= 2
_
0
e
c
2
w
2
t
cos(wx w) dw
=u(x, t) =
1
f()
__
0
e
c
2
w
2
t
cos(wx w)dw
_
d
=
1
f()
_
1
2c
_
t
_1
2
e
(x)
2
4c
2
t
_
d
=
1
2c
t
_
f()e
(x)
2
4c
2
t
d
_
_
_
0
e
s
2
cos 2bs ds =
2
e
b
2
,
let s = cw
t, b =
x
2c
t
.
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 210
Example 2
Solve the following partial dierential equation describing the vibration of
an innite string
2
u(x, t)
x
2
1
c
2
2
u(x, t)
t
2
= 0,
u(x, 0) = f(x), < x <
u(x, 0)
t
= 0.
Taking Fourier transform with respect to x yields
w
2
u(w, t)
1
c
2
d
2
u(w, t)
dt
2
= 0
=
d
2
u
dt
2
+w
2
c
2
u = 0 Second order O.D.E.
= u(w, t) = A(w) cos(cwt) +B(w) sin(cwt).
From initial conditions
u(w, 0) =
f(w)
=A(w) =
f(w)
F
_
u(x, 0)
t
_
=
d u(w, 0)
dt
= 0,
d u(w, t)
dt
= cw
f(w) sin(cwt) +cwB(w) cos(cwt)
=B(w) = 0
= u(w, t) =
f(w) cos(cwt),
cos(cwt) =
1
2
_
e
jcwt
+e
jcwt
= u(w, t) =
1
2
f(w)
_
e
jcwt
+e
jcwt
.
Recall the following Fourier relationships:
F
1
_
f(w)e
jcwt
_
= f(x +ct),
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 211
F
1
_
f(w)e
jcwt
_
= f(x ct),
which are based on the time shifting property:
F
1
_
f(w)e
jwt
o
_
= f(t t
o
).
Therefore, the solution may be expressed as:
u(x, t) = F
1
_
1
2
f(w)
_
e
jcwt
+e
jcwt
_
=u(x, t) =
1
2
[f(x +ct) +f(x ct)]
9.5 SelfSimilar Solutions (From Reynolds, 1981)
9.5.1 Characteristic Scales and ScaleSimilar Problems
It is often convenient to present the solution to a PDE problem in a non
dimensional form. This makes the results independent of the size of the
system for which the solution was obtained. Nondimensionalization is
usually accomplished by choosing some length and time scales characteriz-
ing the problem, and then dening nondimensional independent variables
based on these scales.
For example, the solution for uid ow in a rotating sphere might be
expressed nondimensionally in terms of the dimensionless radius
R =
r
r
o
,
where r
o
is the radius of the sphere. It should be noted that r
o
is the
characteristic length scale of the problem. If the uid is initially at rest,
and at time zero it is put into rotation at angular velocity w, then the
period of rotation is
=
2
w
,
where would be the characteristic time scale. Then, a suitable dimen-
sionless time would be
T =
t
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 212
Note that one of the characteristic scales for the independent variables (r
o
)
came from the geometry of the system, and the other () from the boundary
conditions.
The dependent variables also can be represented nondimensionally.
For example, in the rotating sphere problem the equatorial velocity is
u
o
= wr
o
,
and may be used as a characteristic velocity in the dimensionless velocity
U =
u
u
o
.
The problem may also contain some parameters, such as the kinematic
viscosity . The parameters also can be reduced to nondimensional form,
and in the case of viscosity it is customary to use a reciprocal dimensionless
viscosity called the Reynolds number,
Re =
u
o
r
o
.
The solution for the velocity within the rotating sphere could then be ex-
pressed non-dimensionally as
U = U(R, T, Re).
It might also happen that the ow depends upon the polar angular coordi-
nates and , which are additional nondimensional independent variables.
Problems which have natural characteristic scales for the independent
variables (here r
o
and ) are called scalesimilar. Scalesimilar solutions for
systems of dierent size will have the same nondimensional solution, pro-
vided that the two problems also have the same values of the dimensionless
parameters and dimensionless boundary and initial conditions.
9.5.2 SelfSimilarity
There are a few very interesting and important problems for which no nat-
ural characteristic scales for the independent variables exist in the problem
formulation. For example, consider the case of heat conduction in a semi
innite slab initially at uniform temperature, subjected to a step increase
in the surface temperature at time zero. The governing partial dierential
equation is
2
T
x
2
=
1
T
t
, ()
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 213
where is the thermal diusivity of the medium. Also, the appropriate
initial and boundary conditions are:
T(x, 0) = T
i
, x > 0
T(0, t) = T
s
,
T(, t) T
i
.
Clearly, there are no characteristic scales for either length or time in this
problem. This fact is the clue that a selfsimilar solution must exist. Since
the solution to all physical problems must be expressible in dimensionless
form (nature is unaware of the length of a meter), there must be some way
to nondimensionalize the solution to this problem.
Looking at the denominators in (*), it is readily apparent that x
2
and
t have the same dimensions, and therefore the quantity x
2
/t is dimen-
sionless. Somehow the solution must be expressible in terms of this quan-
tity, in order to have dimensionless form. Solutions made nondimensional
by combinations of the independent variables, rather than by characteristic
scales imposed by the geometry, boundary, or initial conditions, are called
selfsimilar solutions.
There is a characteristic temperature for this problem, namely the
step increase in temperature T
s
T
i
. Therefore, one might guess that the
nondimensional form of the solution is
T T
i
T
s
T
i
= f
_
x
2
t
_
. ()
If the preceding equation is indeed a correct solution, then another fully
equivalent form would be
T T
i
T
s
T
i
= g
_
x
t
_
,
and another
T T
i
T
s
T
i
=
x
t
h
_
x
t
_
.
All of these solutions would really be the same time, but the functions f,
g, and h would be dierent. In terms of the similarity variable
=
x
t
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 214
T - T
i
1
T
s
- T
i
0
T
s
T
i
0 x
T
t
(a) (b)
Figure 9.7: Transient temperature distribution in a semiinnite slab (a)
and application of the selfsimilar method (b).
the family of temperature proles existing at dierent times will collapse
to a single curve as illustrated in Figure 9.7. This is the essence of self
similarity. The solution does not scale on the size of the system, instead it
scales on itself.
At rst glance, it may appear disadvantageous to seek a solution in
terms of the nonlinear combination of variables = x/
t. However, note
that a single function g() would be involved, and therefore one would only
have to deal with an ordinary dierential equation. This is the practical
advantage of a selfsimilar problem in two independent variables. The
existence of selfsimilarity will always reduce the number of independent
variables by one.
Example 1: Constant Boundary Conditions
Consider the transient heat transfer problem previously discussed. Lets
assume that the similarity variable of the form
= A
x
t
n
(general format),
where A and n are constants to be chosen in a manner that reduces the
PDE problem to an ODE problem. Now, assume that the dimensionless
solution has the form
T T
i
T
s
T
i
= f()
=T T
i
= (T
s
T
i
)f().
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 215
The governing partial dierential equation can be transformed as follows
2
T
x
2
=
1
T
t
x
[T T
i
] =
x
[(T
s
T
i
)f()] =
T
x
= (T
s
T
i
)
df()
d
x
=
T
x
= (T
s
T
i
)f
A
t
n
,
_
Recall :
x
=
A
t
n
, f
=
df
d
_
2
T
x
2
= (T
s
T
i
)
A
t
n
df
x
= (T
s
T
i
)
A
t
n
f
A
t
n
,
t
[T T
i
] =
t
[(T
s
T
i
)f()] =
T
t
= (T
s
T
i
)
df
d
t
,
t
=
t
_
A
x
t
n
_
=
_
nAx
t
n+1
_
=
T
t
= (T
s
T
i
) f
_
Anx
t
n+1
_
.
Then, substituting into (*) we obtain
(T
s
T
i
)
A
2
t
2n
f
=
1
(T
s
T
i
)
Anx
t
n+1
f
=
A
t
n
f
=
1
nx
t
f
=f
+
1
nxt
n1
A
f
= 0.
Using the denition
= A
x
t
n
= x =
t
n
A
remove x and t from the equation so that it will be an ordinary dierential
equation for f() containing f, f
, f
, and
=f
+
n
A
2
t
2n1
f
= 0, let n =
1
2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 216
=f
+
1
2A
2
f
= 0, let A =
1
2
=f
+f
= 0 ( )
=
Ax
t
n
, A =
1
2
, n =
1
2
,
= =
x
2t
.
Express the boundary and initial conditions in terms of f()
T(x, 0) = T
i
,
require f() 0 as ,
T(, t) T
i
,
T(0, t) = T
s
, requires f(0) = 1.
( )
df
d
= f
=
df
= d, integrate
=lnf
2
2
+c
0
=f
= e
2
2
e
c
0
=f
= c
1
exp
_
2
2
_
, integrating again
=f = c
1
_
exp
_
2
2
_
d +c
2
.
The lower limit is arbitrary, and is a good choice because as t 0
. Since f() 0,
f = c
1
_
exp
_
2
2
_
d
. .
0
+c
2
= 0 = c
2
= 0,
f(0) = 1 =1 = c
1
_
0
exp
_
2
2
_
d =c
1
=
1
_
0
exp
_
2
2
d
,
=f() =
_
exp
_
2
2
_
d
_
0
exp
_
2
2
d
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 217
The solution can be expressed in terms of known special functions by letting
z =
2
d =
2 dz,
=f() =
_
2
=z
e
z
2
2 dz
_
0
e
z
2
2 dz
=
_
2
e
z
2
dz
_
0
e
z
2
dz
.
Recall :
_
0
e
z
2
dz =
2
,
_
2
e
z
2
dz =
2
erfc
_
2
_
.
=f() = erfc
_
2
_
, =
x
2t
=
T T
i
T
s
T
i
= erfc
_
x
2
t
_
Example 2: Variable Boundary Conditions
The motion of a viscous uid, initially at rest, over an innite plate that is
set into motion at time zero is described by
2
u
y
2
=
u
t
,
where u is the velocity tangential to the plate, and is the constant kine-
matic viscosity. For the following initial and boundary conditions
u(y, 0) = 0,
u(0, t) = at
b
,
u(y, t) 0, as y ,
where a, b are xed parameters, assume a solution of the form
u = Af(), = B
y
t
n
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 218
=u(0, t) = at
b
= Af(0).
This is true only for b = 0. Therefore, it is not a good choice. A better
choice is to assume a solution of the form
u = At
m
f(), = B
y
t
n
=u(0, t) = at
b
= At
m
f(0).
We must choose m = b and A any way we like. If we choose A = a, then
must impose f(0) = 1. Thus, a good choice is
u = at
b
f(), = B
y
t
n
.
9.6 Exercises
(1) Classify each of the following equations accordingly as elliptic, hyper-
bolic or parabolic
(a)
2
u
t
2
= k
2
2
u
x
2
,
(b)
2
u
x
2
+ 3
2
u
xy
+ 4
2
u
y
2
+ 5
u
x
2
u
y
+ 4u = 2x 3y,
(c) x
2
u
x
2
+y
2
u
y
2
+ 3y
2
u
x
= 0.
(2) Solve the following boundaryvalue problem by the method of separa-
tion of variables
u
x
= 4
u
y
, u(0, y) = 8e
3y
+ 4e
5y
.
(3) Solve by the method of separation of variables
u
t
= 2
2
u
x
2
, 0 < x < 3, t > 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 219
given that
u(0, t) = u(3, t) = 0,
u(x, 0) = 5 sin4x 3 sin8x + 2 sin10x,
|u(x, t)| < M,
where the last condition states that u is bounded for 0 < x < 3, t > 0.
(4) Apply Laplace transformations to show that the Laplace time solution
of the following boundary value problem
u
t
= k
2
u
x
2
, u(a, t) = Q(t), u(x, 0) = 0, |u(x, t)| < M,
is
u(x, s) = Qe
(xa)
s/k
.
(5) In the theory of neutron slowing down, one encounters the equation
()
= D
x
2
(0 < ),
where is a logarithmic energy variable, D is the diusion coecient,
and () is a known positive function. Solve this equation by the
method of Fourier transformations for an innite medium (in x) subject
to the initial condition: (0, x) = (x).
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 220
Chapter 10
Solutions to Exercises
10.1 Dierential Equations of the First Order (Chapter 2)
[1] Obtain the general solution of (Separable ODE)
(a) xy
3
dx +e
x
2
dy = 0 =xy
3
dx = e
x
2
dy
=xe
x
2
dx =
dy
y
3
=
_
xe
x
2
dx =
_
y
3
dy
=
e
x
2
2
=
y
2
2
+C =e
x
2
+y
2
= 2C =e
x
2
+y
2
= C
(b)
dy
dx
= xy
2
=x dx =
dy
y
2
=
_
x dx =
_
y
2
dy =
x
2
2
= y
1
+C
x
2
2
+
1
y
= C =yx
2
+ 2 = 2Cy (2C = C
)
yx
2
+C
y + 2 = 0 =y
_
x
2
+C
_
+ 2 = 0
(c) x
2
y
dy
dx
= e
y
=
x
2
dx
=
e
y
y dy
=
_
dx
x
2
=
_
y dy
e
y
__
u dv = uv
_
v du, u = y, du = dy, dv = e
y
dy, v = e
y
_
=
1
x
= ye
y
_
_
e
y
_
dy =
1
x
= ye
y
e
y
+C
=
1
x
+C = ye
y
+e
y
=e
y
+e
y
xC = yx +x
=x(y + 1) = (1 +xC)e
y
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 221
[2] Obtain a family of solutions for the following equations
(a) xy dx
_
x
2
+ 3y
2
_
dy = 0
_
y = ux, dy = u dx +x du
_
ux
2
dx
_
x
2
+ 3u
2
x
2
_
(udx +xdu) = 0
=ux
2
dx x
2
u dx x
3
du 3u
3
x
2
dx 3u
2
x
3
du = 0
=x
3
du + 3u
3
x
2
dx + 3u
2
x
3
du = 0 =x du + 3u
3
dx + 3u
2
x du = 0
=x + 3u
3
dx
du
+ 3u
2
x = 0 =
x
dx
+
3u
3
du
+
3u
2
x
dx
= 0
=
x
dx
_
1 + 3u
2
_
= 3
u
3
du
=
dx
x
=
_
1 + 3u
2
_
du
3u
3
=
dx
x
=
du
3u
3
du
u
integrate =ln|x| =
u
2
6
ln|u| + ln|C|
_
ln[ab] = lna + lnb, ln
_
a
b
_
= lna lnb
_
=ln|xu| ln|C| =
1
6u
2
=ln
_
xu
C
_
=
1
6u
2
, u =
y
x
=ln
_
y
C
_
=
1
6
_
y
x
_
2
=ln
_
y
C
_
=
x
2
6y
2
=x
2
= 6y
2
ln
_
y
C
_
(b) x
2
dy
dx
= 4x
2
+ 7xy + 2y
2
=x
2
dy = 4x
2
dx + 7xy dx + 2y
2
dx
_
y = ux, dy = u dx +x du
_
=(u dx +x du) x
2
= 4x
2
dx + 7x
2
u dx + 2u
2
x
2
dx
=u dx +x du = 4 dx + 7u dx + 2u
2
dx
=x du = 4dx + 6u dx + 2u
2
dx =x du =
_
4 + 6u + 2u
2
_
dx
=
dx
x
=
du
4 + 6u + 2u
2
=
du
(2u + 2)(u + 2)
=
du
2u + 2
1
2
_
du
u + 2
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 222
_
_
1
(2u + 2)(u + 2)
=
A
2u + 2
+
B
u + 2
=
1
2u + 2
1
2
_
1
u + 2
_
A(u + 2) +B(2u + 2)
Au + 2A+ 2Bu + 2B = 2(A+B) +u(A+ 2B)
A+ 2B = 0 =B =
A
2
2
_
A+B
_
= 1 =2
_
A
A
2
_
= 1 =A = 1, B =
1
2
_
_
integrate =ln|x| =
1
2
ln|u + 1|
1
2
ln|u + 2| +
Const.
..
1
2
ln|C|
=2 ln|x| = ln
_
u + 1
u + 2
_
C
=x
2
= C
_
u + 1
u + 2
_
, u =
y
x
=x
2
= C
_
y
x
+ 1
y
x
+ 2
_
= C
_
y +x
y + 2x
_
=x
2
(y + 2x) = C(y +x)
(c) (x y)(4x +y)dx +x(5x y)dy = 0
(y = ux, dy = u dx +x du)
=(x ux)(4x +ux)dx +x(5x ux)(u dx +x du) = 0
4x
2
dx+ux
2
dx4ux
2
dxu
2
x
2
dx+5x
2
u dx+5x
3
duu
2
x
2
dxux
3
du = 0
4 dx + 2u dx 2u
2
dx + 5x du ux du = 0
_
4 + 2u 2u
2
_
dx + (5x ux)du = 0
dx
x
+
(5 u)du
4 + 2u 2u
2
= 0 =
dx
x
+
(5 u)du
(2 + 2u)(2 u)
= 0
_
_
5 u
(2 u)(2 + 2u)
=
A
2 u
+
B
2 + 2u
=
1
2
_
1
2 u
_
+
1
1 +u
A(2 + 2u) +B(2 u)
2A+ 2Au + 2B uB
2(A+B) +u(2AB)
2(A+B) = 5, (2AB) = 1 A =
1
2
, B = 2
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 223
=
dx
x
=
1
2
_
du
2 u
_
du
1 +u
=
1
2
_
du
u 2
_
du
1 +u
=ln|x| =
1
2
ln|u2| ln|1+u| +ln|C| =2 ln|x(1+u)| = ln|C(u2)|
=x
2
(1 +u)
2
= C(u 2), u =
y
x
=x
2
_
1 +
y
x
_
2
= C
_
2 +
y
x
_
=x
2
_
1 +
2y
x
+
y
2
x
2
_
= C
_
2 +
y
x
_
=x
2
+ 2xy +y
2
= C
_
2 +
y
x
_
=(x +y)
2
=
C
x
(y 2x)
=x(x +y)
2
= C(y 2x)
[3] Test each of the following equations for exactness and solve the equation
(a)
M
..
(x + 2y) dx +
N
..
(2x +y) dy = 0
_
exact :
M
y
=
N
x
= 2, F = C
_
M =
F
x
= x + 2y =F =
x
2
2
+ 2xy +(y), N =
F
y
= 2x +y
F
y
= 2x +
(y) = 2x +y =
(y) = y =(y) =
y
2
2
x
2
2
+ 2xy +
y
2
2
= C
=x
2
+ 4xy +y
2
= C
(b) v
_
2uv
2
3
_
du +
_
3u
2
v
2
3u + 4v
_
dv = 0
=
M
..
_
2uv
3
3v
_
du +
N
..
(3u
2
v
2
3u + 4v) dv = 0
_
exact :
M
v
=
N
u
= 6uv
2
3
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 224
M =
F
u
= 2uv
3
3v =F = u
2
v
3
3uv +(v)
N =
F
v
= 3u
2
v
2
3u + 4v
F
v
= 3u
2
v
2
3u +
(v)
(v) = 4v =(v) = 2v
2
F = u
2
v
3
3uv + 2v
2
= C
=v
_
u
2
v
2
3u + 2v
_
= C
(c)
M
..
_
cos 2y 3x
2
y
2
_
dx +
N
..
_
cos 2y 2xsin2y 2x
3
y
_
dy = 0
_
exact :
M
y
=
N
x
= 2 sin2y 6x
2
y, F = Const.
_
M =
F
x
= cos 2y 3x
2
y
2
[1]
N =
F
y
= cos 2y2xsin2y2x
3
y =F =
sin2y
2
+xcos 2yx
3
y
2
+(x)
=
F
x
= cos 2y 3x
2
y
2
+
(x) [2]
[1]&[2]
(x) = 0 =(x) = C
=
sin2y
2
+xcos 2y x
3
y
2
= C
[4] Solve each of the following equations (I.F.)
(a)
M
..
_
x
2
+y
2
+ 1
_
dx +
N
..
x(x 2y) dy = 0
M
y
N
x
= 2y (2x 2y) = 4y 2x
1
N
_
M
y
N
x
_
=
4y 2x
x(x 2y)
=
2(2y x)
x(2y x)
=
2
x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 225
an I.F. is : u(x) = exp
__
2
x
dx
_
= exp
_
2 lnx
= e
ln x
2
= x
2
=uM dx +uN dy = 0 must be exact
=x
2
_
x
2
+y
2
+ 1
_
dx +
1
x
(x 2y)dy = 0
=
_
1 +
y
2
x
2
+
1
x
2
_
dx +
_
1
2y
x
_
dy = 0
M =
F
x
= 1 +
y
2
x
2
+
1
x
2
, N =
F
y
= 1
2y
x
=F = y
y
2
x
+(x)
F
x
=
y
2
x
2
+
(x) = 1 +
y
2
x
2
+
1
x
2
=
(x) = 1 +
1
x
2
=(x) = x
1
x
y
y
2
x
+x
1
x
= C =x
2
y
2
+xy 1 = Cx
(b)
M
..
y(2x y + 1) dx +
N
..
x(3x 4y + 3) dy = 0
M
y
N
x
= 2x 2y + 1 (6x 4y + 3) = 4x + 2y 2
1
M
_
M
y
N
x
_
=
2(2x y + 1)
y(2x y + 1)
=
2
y
an I.F. is : u(y) = exp
_
_ _
2
y
_
dy
_
= e
2 ln y
= y
2
=y
2
_
y(2x y + 1)dx +x(3x 4y + 3)dy
= 0
_
2xy
3
y
4
+y
3
_
dx +
_
3x
2
y
2
4xy
3
+ 3xy
2
_
dy = 0
_
exact : F = C
_
F
x
= 2xy
3
y
4
+y
3
,
F
y
= 3x
2
y
2
4xy
3
+ 3xy
2
=F = x
2
y
3
xy
4
+xy
3
+(y)
=
F
y
= 3x
2
y
2
4xy
3
+ 3xy
2
+
(y) = 3x
2
y
2
4xy
3
+ 3xy
2
=
(y) = 0 =(y) = const.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 226
F = C = x
2
y
3
xy
4
+xy
3
+ const. =xy
3
(x y + 1) = C
(c)
M
..
y(4x +y) dx
N
..
2(x
2
y) dy = 0
M
y
N
x
= 4x + 2y (4x) = 8x + 2y
1
M
_
M
y
N
x
_
=
8x + 2y
y(4x +y)
=
2
y
an I.F. is : u(y) = exp
_
_
2
y
dy
_
= y
2
=
1
y
(4x +y)dx
2
y
2
_
x
2
y
_
dy = 0
=
_
4x
y
+ 1
_
dx
_
2x
2
y
2
2
y
_
dy = 0 (exact)
_
_
F
x
=
4x
y
+ 1 =F =
2x
2
y
+x +(y) =
F
y
=
2x
2
y
2
+
(y)
F
y
=
2x
2
y
2
+
2
y
(y) =
2
y
=(y) = 2 lny
=F = C =
2x
2
y
+x + 2 lny =2x
2
+xy + 2y lny = Cy
[5] Find the general solution of the following equations
(a) y
2
dx +
_
xy +y
2
1
_
dy = 0; when x = 1, y = +1
_
dx
dy
+P(y)x = Q(y)
_
=
dx
dy
+
xy +y
2
1
y
2
= 0 =
dx
dy
+
x
y
+ 1
1
y
2
= 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 227
=
dx
dy
+
P(y)
..
_
1
y
_
x =
Q(y)
..
1
y
2
1 general linear 1st order ODE
x = e
_
1
y
dy
__
e
_
1
y
dy
_
1
y
2
1
_
dy +C
_
=x = e
ln y
__
e
ln y
_
1
y
2
1
_
dy +C
_
=
1
y
__ _
1
y
y
_
dy +C
_
=x =
1
y
_
lny
y
2
2
+C
_
=2xy = 2 lny y
2
+C
At (x, y) = (1, 1) : 2 = 1 +C =C = 1
2xy = 2 lny y
2
1 =y
2
+ 2xy + 1 = 2 lny
(b)
dy
dx
= y tanx + cos x =
dy
dx
y
P(x)
..
tanx =
Q(x)
..
cos x
y = e
_
(tan x)dx
__
e
_
(tan x)dx
cos x dx +C
_
__
tanx dx = ln| cos x| +C
_
= e
ln cos x
__
e
ln cos x
cos x dx +C
_
=
1
cos x
__
cos
2
x dx +C
_
__
cos
2
x dx =
sinxcos x
2
+
x
2
_
=
1
cos x
_
sinxcos x
2
+
x
2
+C
_
=
sinx
2
+
x
2 cos x
+
C
cos x
=2y = sinx +
x
cos x
+
C
1
cos x
=2y = sinx +
x +C
1
cos x
_
recall :
1
cos
= sec
_
=2y = sinx + sec x(x +C
1
)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 228
[6] Solve the following equations (Bernoullis)
(a) 2x
3
dy
dx
= y
_
y
2
+ 3x
2
_
dy
dx
=
y
3
2x
3
+
3x
2
y
2x
3
=
dy
dx
+
_
3
2x
_
y =
_
1
2x
3
_
y
3
Bernoulli
s
let z = y
13
= y
2
, dz = 2y
3
dy =dy =
dz
2y
3
dz
dx
+ (2)
_
3
2x
_
z = (2)
_
1
2x
3
_
=
dz
dx
+
3
x
z =
1
x
3
(1st order linear in z)
z = e
_
3
x
dx
__
e
_
3
x
dx
_
1
x
3
_
dx +C
_
=z = e
3 ln x
__
e
3 ln x
_
1
x
3
_
dx +C
_
= x
3
__
x
3
_
1
x
3
_
dx +C
_
=z = x
3
__
()dx +C
_
=
1
x
2
+
C
x
3
_
recall : z = y
2
_
=
1
y
2
=
1
x
2
+
C
x
3
=x
3
= y
2
x +y
2
C =x
3
= y
2
(C x)
(b)
_
2y
3
x
3
_
dx + 3xy
2
dy = 0; when x = 1, y = 1
=
dy
dx
=
2y
3
x
3
3xy
2
=
dy
dx
=
2y
3x
+
x
2
3y
2
=
dy
dx
+
_
2
3x
_
y =
_
x
2
3
_
y
2
Bernoulli
s
let z = y
1(2)
= y
3
, dz = 3y
2
dy =dy =
dz
3y
2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 229
substituting
dz
dx
+ 3
_
2
3x
_
z = 3
_
x
2
3
_
=
dz
dx
+
_
2
x
_
z = x
2
1st order linear O.D.E.
z = e
_
2
x
dx
__
e
_
2
x
dx
(x
2
)dx+C
_
=
1
x
2
__
x
4
dx +C
_
=
1
x
2
_
x
5
5
+C
_
=z =
x
3
5
+
C
x
2
, z = y
3
=y
3
=
x
3
5
+
C
x
2
=5x
2
y
3
= x
5
+C
At (x, y) = (1, 1) : 5 = 1 +C
=C
= 4
=5x
2
y
3
= x
5
+ 4
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 230
10.2 Fundamental and Important Properties of Linear Ordinary
Dierential Equations (Chapter 3)
[1] Obtain the Wronskian of the functions 1, x, x
2
, , x
n1
for n > 1
W
_
1, x, x
2
, , x
n1
_
=
1 x x
2
x
n1
0 1 2x (n 1)x
n2
0 0 2 (n 1)(n 2)x
n3
0 0 0 (n 1)(n 2)(n 3)x
n4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 (n 1)!
= 1 1 2 (n 1)!
= 0! 1! 2! (n 1)!
[2] Show that the operators D 2 and xD + 1 are not commutative with
respect to multiplication
let : A = D 2, B = xD + 1
BA = (xD + 1)(D 2) = xD(D 2) + (D 2) = xD
2
2xD +D 2
AB = (D 2)(xD + 1) = D(xD + 1) 2(xD + 1)
= xD
2
+D +D 2xD 2 = xD
2
2xD + 2D 2
=AB = BA
Therefore, the operators D2 & xD+1 are not commutative with respect
to multiplication.
[3] Show that the functions cos 2x, sin
2
x, cos
2
x are linearly dependent.
C
1
cos 2x +C
2
sin
2
x +C
3
cos
2
x = 0
Since cos 2x = cos
2
xsin
2
x, we can choose C
1
= 1, C
2
= 1, and C
3
= 1.
These constants are not equal to zero, thus the functions are dependent.
[4] Let y
1
(x), y
2
(x) be solutions of y
+p(x)y
+q(x)y = 0. Prove that the
Wronskian is:
W = y
1
y
2
y
2
y
1
= Ce
_
p dx
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 231
Because y
1
and y
2
are solutions: y
1
+py
1
+qy
1
= 0, y
2
+py
2
+qy
2
= 0
=y
2
(y
1
+py
1
+qy
1
) y
1
(y
2
+py
2
+qy
2
) = 0
=y
2
y
1
+py
2
y
1
+qy
2
y
1
y
1
y
2
py
1
y
2
qy
1
y
2
= 0
=y
1
y
2
y
2
y
1
+p (y
1
y
2
y
2
y
1
) = 0,
W =
y
1
y
2
y
1
y
= y
1
y
2
y
2
y
1
=y
1
y
2
y
2
y
1
+pW = 0,
dW
dx
= y
1
y
2
+y
1
y
2
y
2
y
1
y
2
y
1
= y
1
y
2
y
2
y
1
=
dW
dx
+pW = 0 =
dW
W
= p dx
=lnW =
_
p dx +C =W = Ce
_
p dx
=W = y
1
y
2
y
2
y
1
= Ce
_
p dx
[5] Solve the following equations:
(a)
_
D
3
D
2
4D + 4
_
y = 0
=
3
2
4 + 4 = 0 =
2
( 1) 4( 1) = 0
=( 1)
_
2
4
_
= 0 =( 1)( 2)( + 2) = 0
1
= 1,
2
= 2,
3
= 2
=y(x) = C
1
e
x
+C
2
e
2x
+C
3
e
2x
(b)
_
6D
4
+ 23D
3
+ 28D
2
+ 13D + 2
_
y = 0
=6
4
+ 23
3
+ 28
2
+ 13 + 2 = 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 232
_
_
6
3
+ 17
2
+ 11 + 2
+ 1 | 6
4
+ 23
3
+ 28
2
+ 13 + 2
6
4
+ 6
3
17
3
+ 28
2
17
3
+ 17
2
11
2
+ 13
11
2
+ 11
2 + 2
2 + 2
0
_
_
=( + 1)
_
6
3
+ 17
2
+ 11 + 2
_
= 0
_
_
6
2
+ 5 + 1
+ 2 | 6
3
+ 17
2
+ 11 + 2
6
3
+ 12
2
5
2
+ 11
5
2
+ 10
+ 2
_
_
=(+1)(+2)
_
6
2
+5+1
_
= 0
_
6
2
+5+1 = (2+1)(3+1)
_
=( + 1)( + 2)(2 + 1)(3 + 1) = 0
1
= 1,
2
= 2,
3
=
1
2
, =
1
3
=y(x) = C
1
e
x
+C
2
e
2x
+C
3
e
x
2
+C
4
e
x
3
(c)
_
D
4
5D
2
6D 2
_
y = 0
=
4
5
2
6 2 = 0
_
2
4 2
+ 1 |
4
5
2
6 2
4
+
3
3
5
2
2
4
2
6
4
2
4
2 2
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 233
=( + 1)
_
2
4 2
_
= 0
_
2
2 2
+ 1 |
3
2
4 2
3
+
2
2
2
4
2
2
2
2 2
_
_
=(+1)
2
_
2
2 2
_
= 0 =(+1)
2
_
1
3
__
1 +
3
_
= 0
1
=
2
= 1,
3
= 1 +
3,
4
= 1
3
=y(x) = C
1
e
x
+C
2
xe
x
+C
3
e
(1+
3)x
+C
4
e
(1
3)x
(d)
_
D
4
+ 2D
3
+ 10D
2
_
y = 0
=
4
+ 2
3
+ 10
2
= 0 =
2
_
2
+ 2 + 10
_
= 0
_
2
+ 2 + 10 = 0, =
2
4 40
2
=
_
1 + 3i
1 3i
_
=
2
( + 1 3i)( + 1 + 3i) = 0
1
=
2
= 0,
3
= 1 + 3i,
4
= 1 3i
=y(x) = C
1
+C
2
x +C
3
e
x
cos 3x +C
4
e
x
sin3x
(e)
_
D
6
+ 9D
4
+ 24D
2
+ 16
_
y = 0 =
6
+ 9
4
+ 24
2
+ 16 = 0
_
4
+ 8
2
+ 16
2
+ 1 |
6
+ 9
4
24
2
+ 16
6
+
4
8
4
+ 24
2
8
4
+ 8
2
16
2
+ 16
_
_
=
_
2
+ 1
_ _
4
+ 8
2
+ 16
_
= 0 =
_
2
+ 1
_ _
2
+ 4
_
2
= 0
1
= i,
2
= i,
3
=
4
= 2i,
5
=
6
= 2i
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 234
y(x) = C
1
cos x +C
2
sinx + (C
3
+C
4
x) cos 2x + (C
5
+C
6
x) sin2x
[6] Use the method of undetermined coecients to obtain the general so-
lution of
_
D
2
+D
_
y = sinx.
y = y
h
+y
p
y
h
:
_
D
2
+D
_
y = 0 =
2
+ = 0
=( + 1) = 0
1
= 0,
2
= 1
=y
h
= C
1
+C
2
e
x
y
p
: Assume y
p
= Acos x +Bsinx,
dy
p
dx
= Asinx +Bcos x,
d
2
y
p
dx
2
= Acos x Bsinx
d
2
y
p
dx
2
+
dy
p
dx
= sinx
=Acos x Bsinx Asinx +Bcos x = sinx
=(A+B) sinx + (B A) cos x = sinx
AB = 1, B A = 0 A = B =A = B =
1
2
=y
p
=
cos x
2
sinx
2
y = y
h
+y
p
=y(x) = C
1
+C
2
e
x
cos x
2
sinx
2
[7] Use the method of variation of parameters to obtain the general solution
of
_
D
2
4D + 4
_
y = e
x
.
y = y
h
+y
p
y
h
:
_
D
2
4D + 4
_
y = 0 =
2
4 + 4 = 0
=( 2)( 2) = 0
1
=
2
= 2
y
h
= C
1
e
2x
+C
2
xe
2x
y
p
: Assume y
p
= u
1
(x)e
2x
+u
2
(x)xe
2x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 235
_
_
_
u
1
e
2x
+u
2
xe
2x
= 0
2u
1
e
2x
+u
2
_
e
2x
+ 2xe
2x
_
= e
x
W =
e
2x
xe
2x
2e
2x
e
2x
+ 2xe
2x
= e
4x
+ 2xe
4x
2xe
4x
= e
4x
u
1
=
1
e
4x
0 xe
2x
e
x
e
2x
+ 2xe
2x
=
xe
3x
e
4x
= xe
x
,
u
1
=
_
xe
x
dx = xe
x
+e
x
.
_
_
_
u dv = uv
_
v du
u = x, du = dx
dv = e
x
dx, v = e
x
xe
x
_
(e
x
)dx = xe
x
e
x
_
_
u
2
=
1
e
4x
e
2x
0
2e
2x
e
x
=
1
e
x
= e
x
, u
2
=
_
e
x
dx = e
x
.
=y
p
=
_
xe
x
+e
x
_
e
2x
e
x
xe
2x
= xe
x
+e
x
xe
x
= e
x
=y = y
h
+y
p
=y(x) = C
1
e
2x
+C
2
xe
2x
+e
x
[8] Find a general solution of the following equations
(a)
_
x
2
D
2
2
_
y = 3x
2
Euler Cauchy type
Let x = e
t
, x
2
D
2
= D
t
(D
t
1)
=
_
D
t
(D
t
1) 2
y = 3
_
e
t
_
2
=
_
D
2
t
D
t
2
_
y = 3e
2t
2
2 = 0 =
1
1 + 8
2
=
_
2
1
=y
h
= C
1
e
2t
+C
2
e
t
For the particular solution assume
y
p
= Ate
2t
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 236
multiply by t to dierentiate from y
h
.
_
_
dy
p
dt
= Ae
2t
+ 2Ate
2t
d
2
y
p
dt
2
= 2Ae
2t
+ 2Ae
2t
+ 4Ate
2t
= 4Ae
2t
+ 4Ate
2t
=4Ae
2t
+ 4Ate
2t
Ae
2t
2Ate
2t
2Ate
2t
= 3e
2t
=3Ae
2t
= 3e
2t
=A = 1
y
p
= te
2t
y(t) = C
1
e
2t
+C
2
e
t
+te
2t
, x = e
t
(lnx = t)
y(x) = C
1
x
2
+C
2
x
1
+x
2
lnx
(b)
_
x
2
D
2
+xD 1
_
y = 4 Euler Cauchy type
let x = e
t
, xD = D
t
, x
2
D
2
= D
t
(D
t
1)
_
D
t
(D
t
1) +D
t
1
y = 4 =
_
D
2
t
1
_
y = 4
=
2
1 = 0
1
= 1,
2
= 1
y
h
= C
1
e
t
+C
2
e
t
For the particular solution, assume
y
p
= A =D
2
t
y
p
y
p
= 4 =0 A = 4 =A = 4
y(t) = C
1
e
t
+C
2
e
t
4, x = e
t
=y(x) = C
1
x +C
2
x
1
4
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 237
10.3 Series Solutions of Dierential Equations (Chapter 4)
[1] Determine the interval of convergence for each of the following series,
including consideration of the behavior of the series at each end point
(a)
n=1
(1)
n
(x 2)
n
(4
n
)
n
=
n=1
(1)
n
(x x
0
)
n
(4
n
)
n
where x
0
= 2
L = lim
n
a
n+1
a
n
= lim
n
(1)
n+1
/
_
(4
n+1
)
n + 1
(1)
n
/ [(4
n
)
n]
= lim
n
1
4
_
n
n + 1
_
1/2
=
1
4
The radius of convergence is: R =
_
1
4
_
1
= 4.
The series converges when x
0
R < x < x
0
+R 2 < x < 6.
The series diverges when x < 2 or x > 6.
For x = 6, reduces to the convergent alternating series
n=1
(1)
n
n
For x = 2, reduces to the divergent series
n=1
1
n
.
=Interval of convergence is : (2, 6 ]
(b)
n=0
2
n
x
n
n!
where x
0
= 0
L = lim
n
a
n+1
a
n
= lim
n
2
n+1
(n+1)!
2
n
n!
= lim
n
2
n
2
n!(n+1)
2
n
n!
= lim
n
2
n + 1
= 0
Interval of convergence :
_
1
L
,
1
L
_
= (, )
Therefore, the series converges for all x
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 238
[2] For each of the following dierential equations, obtain the most general
solution which is representable by a Maclaurin series (Apply the power
series method: y =
k=0
a
k
x
k
)
(a) x
2
d
2
y
dx
2
dy
dx
+y = 0
Let y =
k=0
a
k
x
k
,
dy
dx
=
k=0
ka
k
x
k1
,
d
2
y
dx
2
=
k=0
k(k 1)a
k
x
k2
Ly =
k=0
k(k 1)a
k
x
k
k=0
ka
k
x
k1
+
k=0
a
k
x
k
= 0
=
k=0
[k(k 1) + 1]a
k
x
k
k=0
ka
k
x
k1
= 0
=
k=1
[(k 1)(k 2) + 1]a
k1
x
k1
k=0
ka
k
x
k1
. .
k=1
ka
k
x
k1
= 0
=
k=1
__
k
2
3k + 3
_
a
k1
ka
k
x
k1
= 0
recurrence formula : a
k
=
_
k
2
3k + 3
k
_
a
k1
(k = 1, 2, 3, )
a
1
= a
0
, a
2
=
a
1
2
=
a
0
2
, a
3
= a
2
=
a
0
2
, a
4
=
7a
3
4
=
7a
0
8
=y = a
0
_
1 +x +
x
2
2
+
x
3
2
+
7x
4
8
+
_
(b) x
2
d
2
y
dx
2
dy
dx
= 0
Let y =
k=0
a
k
x
k
,
dy
dx
=
k=0
ka
k
x
k1
,
d
2
y
dx
2
=
k=0
k(k 1)a
k
x
k2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 239
Ly =
k=0
k(k 1)a
k
x
k
k=0
ka
k
x
k1
= 0
=
k=1
[(k 1)(k 2)] a
k1
x
k1
k=0
ka
k
x
k1
= 0
=
k=1
_
k
2
3k + 2
_
a
k1
x
k1
k=1
ka
k
x
k1
= 0
=
k=0
_
(k
2
3k + 2)a
k1
ka
k
x
k1
= 0
a
k
=
_
k
2
3k + 2
k
_
a
k1
(k = 1, 2, 3, )
a
1
= 0, a
2
= 0, a
3
=
2a
2
3
= 0, a
4
=
6a
3
4
= 0
=y = a
0
(c)
dy
dx
+x
dy
dx
= y
Let y =
k=0
a
k
x
k
,
dy
dx
=
k=0
ka
k
x
k1
k=0
ka
k
x
k1
+
k=0
ka
k
x
k
k=0
a
k
x
k
= 0
=
k=0
ka
k
x
k1
+
k=0
(k 1)a
k
x
k
= 0
=
k+1=0
(k + 1)a
k+1
x
k
+
k=0
(k 1)a
k
x
k
= 0
=
k=0
[(k + 1)a
k+1
+ (k 1)a
k
] x
k
= 0
(k + 1)a
k+1
+ (k 1)a
k
= 0 =a
k+1
=
_
k 1
k + 1
_
a
k
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 240
a
1
= a
0
, a
2
= a
3
= = 0
y =
k=0
a
k
x
k
= a
0
+a
1
x =y = a
0
(1 +x)
[3] Show the relation between m, p, and s
..
m=2
m(m1)a
m
x
m2
=
..
p=1
(p + 1)pa
p+1
x
p1
=
..
s=0
(s + 2)(s + 1)a
s+2
x
s
m=2
m(m1)a
m
x
m2
=
m+1=1
(m+ 1)ma
m+1
x
m1
comparing with =m = p + 1
m=2
m(m1)a
m
x
m2
=
m+2=0
(m+ 2)(m+ 1)a
m+2
x
m
comparing to =m = s + 2
[4] Use the method of Frobenius to obtain the general solution of the fol-
lowing dierential equation, valid near x = 0:
x
d
2
y
dx
2
+ 2
dy
dx
+xy = 0, at x = 0 regular singular point
let y = x
r
m=0
a
m
x
m
, y
m=0
(m+r)a
m
x
m+r1
,
y
m=0
(m+r)(m+r 1)a
m
x
m+r2
=
m=0
(m+r)(m+r 1)a
m
x
m+r1
+ 2
m=0
(m+r)a
m
x
m+r1
+
m=0
a
m
x
m+r+1
= 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 241
=
m=0
[(m+r)(m+r 1) + 2(m+r)] a
m
x
m+r1
+
m=0
a
m
x
m+r+1
= 0
=
m+2=0
[(m+r + 2)(m+r + 1) + 2(m+r + 2)] a
m+2
x
m+r+1
+
m=0
a
m
x
m+r+1
= 0
=[r(r 1) + 2r] a
0
x
r1
+ [(r + 1)r + 2(r + 1)] a
1
x
r
+
m=0
{[(m+r + 2)(m+r + 1) + 2(m+r + 2)] a
m+2
+a
m
} x
m+r+1
= 0
x
r1
terms : r(r 1) + 2r = 0 indicial equation (a
0
= 0)
=r
2
+r = 0 =r(r + 1) = 0
=r
1
= 0, r
2
= 1
x
r
terms :
_
(r + 1)r + 2(r + 1)
a
1
= 0
for r
1
= 0 2a
1
= 0 =a
1
= 0
r
2
= 1 0a
1
= 0 =a
1
= arbitrary constant
x
m+r+1
terms :
a
m+2
=
a
m
(m+r + 2)(m+r + 1) + 2(m+r + 2)
(m = 0, 1, 2, )
r
1
= 0 a
1
= 0
a
m+2
=
a
m
(m+ 2)(m+ 1) + 2(m+ 2)
=
a
m
(m+ 2)(m+ 3)
a
2
=
a
0
6
=
a
0
3!
a
3
=
a
1
12
= 0 = a
5
= a
7
a
4
=
a
2
20
=
1
20
_
a
0
6
_
=
a
0
120
=
a
0
5!
a
6
=
a
4
42
=
1
42
_
a
0
120
_
=
a
0
5040
=
a
0
7!
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 242
r
2
= 1 a
m+2
=
a
m
(m+ 1)m+ 2(m+ 1)
=
a
m
(m+ 1)(m+ 2)
a
2
=
a
0
2!
a
3
=
a
1
6
=
a
1
3!
a
4
=
a
2
12
=
1
12
_
a
0
2
_
=
a
0
24
=
a
0
4!
a
5
=
a
3
20
=
_
1
20
_
_
a
1
6
_
=
a
1
120
=
a
1
5!
=y(x) = C
1
y
1
+C
2
y
2
= C
1
m=0
a
m
x
m
+C
2
m=0
a
m
x
m1
= C
1
_
a
0
a
0
3!
x
2
+
a
0
5!
x
4
a
0
7!
x
6
+
_
+x
1
C
2
_
a
0
+a
1
x
a
0
2!
x
2
a
1
3!
x
3
+
a
0
4!
x
4
+
a
1
5!
x
5
+ +
_
=y(x) = C
1
x
1
a
0
_
x
1
3!
x
3
+
x
5
5!
x
7
7!
+
_
+C
2
a
0
x
1
_
1
x
2
2!
+
x
4
4!
+
_
+C
2
a
1
x
1
_
x
x
3
3!
+
x
5
5!
+
_
=y(x) = Ax
1
_
1
x
2
2!
+
x
4
4!
+
_
+Bx
1
_
x
x
3
3!
+
x
5
5!
x
7
7!
+
_
(Let A = C
2
a
0
, B = C
1
a
0
+C
2
a
1
)
=y(x) = x
1
(Acos x +Bsinx)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 243
[5] Find P
6
(x)
P
n+1
(x) =
2n + 1
n + 1
xP
n
(x)
n
n + 1
P
n1
(x)
P
4
=
1
8
_
35x
4
30x
2
+ 3
_
P
5
=
1
8
_
63x
5
70x
3
+ 15x
_
P
6
=
11x
6
_
1
8
_
63x
5
70x
3
+ 15x
_
_
5
6
_
1
8
_
35x
4
30x
2
+ 3
_
_
=
_
693
48
x
6
770
48
x
4
+
165
48
x
2
_
_
175
48
x
4
150
48
x
2
+
15
48
_
=P
6
(x) =
1
16
_
231x
6
315x
4
+ 105x
2
5
_
[6] Obtain the associated Legendre functions: P
1
2
(x), P
2
3
(x), and P
3
2
(x).
_
_
P
m
n
(x) =
_
1 x
2
_
m/2 d
m
P
n
(x)
dx
m
P
2
(x) =
1
2
_
3x
2
1
_
P
3
(x) =
1
2
_
5x
3
3x
_
_
_
(a) P
1
2
(x) =
_
1 x
2
_
1/2 d
dx
P
2
(x) =
_
1 x
2
_
1/2 d
dx
_
1
2
_
3x
2
1
_
_
=P
1
2
(x) = 3x
_
1 x
2
_
1/2
(b) P
2
3
(x) =
_
1 x
2
_
2/2 d
2
dx
2
P
3
(x) =
_
1 x
2
_
d
2
dx
2
_
1
2
_
5x
3
3x
_
_
=
_
1 x
2
_
d
dx
_
15x
2
3
2
_
=P
2
3
(x) = 15
_
x x
3
_
(c) P
3
2
(x) =
_
1 x
2
_
3/2 d
3
dx
3
P
2
(x) =
_
1 x
2
_
3/2 d
3
dx
3
_
1
2
_
3x
2
1
_
_
=
_
1 x
2
_
3/2 d
2
dx
2
(3x) =
_
1 x
2
_
3/2 d
dx
(3)
=P
3
2
(x) = 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 244
[7] By making an appropriate change of variables, obtain the general solu-
tion of the dierential equation:
(Ax +B)
d
2
y
dx
2
+A
dy
dx
+A
2
(Ax +B)y = 0.
Let N = Ax +B =
dN
dx
= A
dy
dx
=
dy
dN
dN
dx
=
dy
dN
A
d
2
y
dx
2
=
d
dx
_
dy
dx
_
=
d
dN
_
dy
dx
_
dN
dx
= A
2
d
2
y
dN
2
=NA
2
d
2
y
dN
2
+A
_
A
dy
dN
_
+A
2
Ny = 0
=N
d
2
y
dN
2
+
dy
dN
+Ny = 0
=N
2
d
2
y
dN
2
+N
dy
dN
+N
2
y = 0
_
Bessel
s eq. with = 0
_
=y(N) = C
1
J
0
(N) +C
2
Y
0
(N), N = Ax +B
=y(Ax +B) = y(x) = C
1
J
0
(Ax +B) +C
2
Y
0
(Ax +B)
[8] Using the series denition,
J
n
(x) =
m=0
(1)
m
(
x
2
)
2m+n
m!(n +m)!
Prove that
d
dx
_
x
n
J
n
(ax)
= ax
n
J
n+1
(ax)
_
Note :
1
m!
=
1
(m+ 1)
,
1
(0)
= 0
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 245
d
dx
_
x
n
J
n
(ax)
=
d
dx
_
x
n
m=0
(1)
m
(
xa
2
)
2m+n
m!(n +m)!
_
=
d
dx
_
m=0
(1)
m
a
2m+n
x
2m
2
2m+n
m!(n +m)!
_
=
m=0
(1)
m
a
2m+n
2mx
2m1
2
2m+n
m!(n +m)!
=
m=0
(1)
m
a
2m+n
x
2m1
2
2m+n1
(m1)!(n +m)!
= ax
n
m=0
(1)
m
a
2m+n1
x
2m+n1
2
2m+n1
(m1)!(n +m)!
_
_
_
(m1)! =
m!
m
(m+n)! = (m+n)(m+n 1) (m+ 1)m(m1)
_
_
_
= ax
n
m=0
(1)
m
(
ax
2
)
2m+n1
(
m!
m
)[(m+n)(m+n 1) (m+ 1)m(m1) ]
(let m = m+ 1)
= ax
n
m+1=0
(1)
m+1
(
ax
2
)
2(m+1)+n1
(m+ 1)![(m+n + 1)(m+n) (m+ 2)
. .
(m+n+1)!
(m+1)!
m(m1)
. .
m!
]
= ax
n
m=1
(1)
m
(
ax
2
)
2m+n+1
(m+ 1)!
(m+n+1)!
(m+1)!
m!
_
_
Note : m! = (m+ 1)
1
(m+ 1)
= 0 at m = 1
the summation term for m = 1 is zero
_
_
= ax
n
m=0
(1)
m
(
ax
2
)
2m+n+1
m!(m+n + 1)!
(comparing with the denition of J
n
(x))
= ax
n
J
n+1
(ax)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 246
[9] Prove that y
1
=
xJ
1/4
_
x
2
2
_
and y
2
=
xY
1/4
_
x
2
2
_
are the solutions
of
d
2
y
dx
2
+x
2
y = 0
_
Hint : let z =
1
2
x
2
and then y = uz
1
4
_
z =
1
2
x
2
=
dz
dx
= x
dy
dx
=
dy
dz
dz
dx
= x
dy
dz
d
2
y
dx
2
=
d
dx
_
dy
dx
_
=
d
dx
_
x
dy
dz
_
=
dy
dz
+x
d
dz
_
dy
dz
_
dz
dx
=
dy
dz
+x
2
d
2
y
dz
2
=
_
_
x
2
d
2
y
dz
2
+
dy
dz
+x
2
y = 0
z =
x
2
2
=2z
d
2
y
dz
2
+
dy
dz
+ 2zy = 0
y = uz
1
4
dy
dz
=
_
z
1
4
_
du
dz
+
1
4
uz
3
4
d
2
y
dz
2
=
d
2
u
dz
2
_
z
1
4
_
+
1
2
du
dz
_
z
3
4
_
3
16
uz
7
4
=2z
_
z
1
4
d
2
u
dz
2
+
1
2
du
dz
z
3
4
3
16
uz
7
4
_
+z
1
4
du
dz
+
1
4
uz
3
4
+ 2z
5
4
u = 0
=2z
5
4
d
2
u
dz
2
+ 2z
1
4
du
dz
1
8
z
3
4
u + 2z
5
4
u = 0
_
multiply by
z
3
4
2
_
=z
2
d
2
u
dz
2
+z
du
dz
+
_
z
2
1
16
_
u = 0
_
Bessel
s eq. with =
1
4
_
=u(z) = AJ
1/4
[z] +BY
1/4
[z], u =
y
z
1
4
=y(z) = Az
1
4
J
1/4
[z] +Bz
1
4
Y
1/4
[z], z =
1
2
x
2
=y(x) = A
_
x
2
2
_1
4
J
1/4
_
x
2
2
_
+B
_
x
2
2
_
1
4
Y
1/4
_
x
2
2
_
,
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 247
let A
= A
_
1
2
_1
4
, B
= B
_
1
2
_1
4
=y(x) = A
xJ
1/4
_
x
2
2
_
+B
xY
1/4
_
x
2
2
_
[10] Find the eigenvalues and the eigenfunctions of the following Sturm-
Liouville problems:
(a)
d
dx
_
x
dy
dx
_
+
x
y = 0, y(1) = 0,
dy(e)
dx
= 0
let x = e
t
=
dx
dt
= e
t
=
dt
dx
= e
t
,
dy
dx
=
dy
dt
dt
dx
=
dy
dt
e
t
=
d
dx
_
e
t
dy
dt
e
t
_
+e
t
y = 0 =
d
dt
_
dy
dt
_
dt
dx
+e
t
y = 0
=e
t
_
d
2
y
dt
2
+y
_
= 0 =
d
2
y
dt
2
+y = 0 =y(t) = Acos
t +Bsin
t
BC1 : x = e
t
=1 = e
0
y(x = 1) = y(t = 0) = 0
BC2 :
dy
dx
=
dy
dt
e
t
, x = e
t
=e = e
1
dy(x = e)
dx
= e
t
dy(t = 1)
dt
= 0
y(t = 0) = 0 =A = 0
e
t
_
dy
dt
_
= e
t
_
Asin
t +
Bcos
t
_
=e
t
dy(t = 1)
dt
=
1
e
_
Bcos
_
= 0 =B
cos
= 0
=
=
_
2n + 1
2
_
(n = 0, 1, )
eigenvalues : =
_
(2n + 1)
2
_
2
(n = 0, 1, )
=y(t) = Bsin
_
(2n + 1)
t
2
_
, x = e
t
=t = lnx
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 248
eigenfunctions : y(x) = Bsin
_
(2n + 1)
2
lnx
_
(n = 0, 1, )
(b)
d
2
y
dx
2
+y = 0, y(0) = y(),
dy(0)
dx
=
dy()
dx
.
(For solution outline see previous problem)
y(x) = Acos
x +Bsin
x
dy(x)
dx
= A
sin
x +B
cos
x
BC1 : y(0) = y() =A = Acos
+Bsin
BC2 :
dy(0)
dx
=
dy()
dx
=B
= A
sin
+B
cos
_
_
_
A = Acos
+Bsin
B = Asin
+Bcos
=
_
_
A
_
cos
1
_
+Bsin
= 0
Asin
+B
_
cos
1
_
= 0
A non-trivial solution of this system (A = B = 0) can be obtained if:
cos
= 1
. .
=2n
(n
=0,1,2,)
and sin
= 0
. .
=n
(n
=0,1,2,)
=
= 2n
eigenvalues :
n
= 4n
2
(n = 0, 1, 2, )
eigenfunctions : y
n
(x) = Acos 2nx +Bsin2nx (n = 0, 1, 2, )
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 249
[11] Show that the following set is orthogonal on the interval 1 x 1,
and determine the corresponding orthonormal set;
sinx, sin2x, sin3x, . . .
The general term is sin nx (n = 1, 2, 3, )
(g
m
, g
n
) =
1
_
1
(sinmx)(sinnx)dx
_
sinxsiny =
1
2
_
cos(x y) cos(x +y)
_
=(g
m
, g
n
) =
1
2
1
_
1
cos(mn)xdx
1
2
1
_
1
cos(m+n)xdx
=
sin(mn)x
2(mn)
1
1
sin(m+n)x
2(m+n)
1
1
= 0.
Therefore, it is an orthogonal set. Now obtain the norm of each function.
||g
m
||
2
= (g
m
, g
m
) =
1
_
1
sin
2
mxdx =
1
2
1
_
1
(1 cos 2mx)dx
=
1
2
_
x
sin2mx
2m
_
1
1
= 1
=||g
m
|| =
1 = 1 =The set is also orthonormal
[12] Prove that
1
_
1
P
m
(x)P
n
(x)dx = 0 if m = n.
Since P
m
(x) and P
n
(x) satisfy Legendres equation
_
1 x
2
_
P
m
2xP
m
+m(m+ 1)P
m
= 0
_
1 x
2
_
P
n
2xP
n
+n(n + 1)P
n
= 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 250
Multiply the rst by P
n
, the second by P
m
and subtract
_
1 x
2
_
[P
n
P
m
P
m
P
n
] 2x[P
n
P
m
P
m
P
n
]
= [n(n + 1) m(m+ 1)] P
m
P
n
=
_
1 x
2
_
d
dx
[P
n
P
m
P
m
P
n
] 2x
_
P
n
P
m
P
m
P
=
_
n(n + 1) m(m+ 1)
P
m
P
n
=
d
dx
_
_
1 x
2
__
P
n
P
m
P
m
P
_
=
_
n(n + 1) m(m+ 1)
P
m
P
n
Integrating
_
1 x
2
__
P
n
P
m
P
m
P
1
1
=
_
n(n + 1) m(m+ 1)
1
_
1
P
m
P
n
dx
=0 =
_
n(n + 1) m(m+ 1)
1
_
1
P
m
P
n
dx
Because m = n,
1
_
1
P
m
(x)P
n
(x)dx = 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 251
10.4 Laplace Transform (Chapter 5)
[1] Find the following Laplace transform
L
_
cos
t
_ _
Hint : L
_
sin
t
_
=
2s
3/2
exp
_
1
4s
__
.
let f(t) = sin
t, f(0) = 0
=f
(t) =
cos
t
2
t
(L{f
(t)} = sF(s) f(0))
L
_
df(t)
dt
_
=
1
2
L
_
cos
t
_
= sF(s) f(0) = s
2s
3
2
e
1
4s
0
=L
_
cos
t
_
=
_
s
_1
2
e
1
4s
[2] Find L
_
f(t)
_
where f(t) =
_
sint 0 < t < ,
0 < t < 2.
_
_
Periodic functions : L{f(t)} =
p
_
0
e
st
f(t)dt
1 e
ps
, p = 2
_
e
at
sinbtdt =
e
at
(a sinbt b cos bt)
a
2
+b
2
_
_
L{f(t)} =
1
1 e
2s
2
_
0
e
st
f(t)dt
=
1
1 e
2s
_
0
e
st
sintdt
=
1
1 e
2s
_
e
st
(s sint cos t)
s
2
+ 1
_
0
=
1
1 e
2s
_
e
s
+ 1
s
2
+ 1
_
=
1 +e
s
(1 +e
s
)(1 e
s
)(s
2
+ 1)
=
1
(1 e
s
)(s
2
+ 1)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 252
[3] Evaluate each of the following
(a) L
_
e
3t
cos 2t
_
=
s + 3
(s + 3)
2
+ 4
=
s + 3
s
2
+ 6s + 13
_
_
_
L
_
e
at
f(t)
_
= F(s a), First translation
L{cos 2t} =
s
s
2
+ 4
, (a = 3)
_
_
_
(b) L
_
e
t
t
2
_
=
2
(s + 1)
3
_
L
_
t
2
_
=
2!
s
3
=
2
s
3
, (a = 1)
_
(c) L
_
4e
2t
sint
_
=
4
(s 2)
2
+ 1
=
4
s
2
4s + 5
_
L{4 sint} =
4
s
2
+ 1
, (a = 2)
_
(d) L{J
0
(t)} =?
_
J
0
(t) = 1
t
2
2
2
(1!)
2
+
t
4
2
4
(2!)
2
t
6
2
6
(3!)
2
+
_
L{J
0
(t)} =
1
s
1
2
2
2!
s
3
+
1
2
2
4
2
4!
s
5
1
2
2
4
2
6
2
6!
s
7
+
=
1
s
_
1
1
2
_
1
s
2
_
+
1 3
2 4
_
1
s
4
_
1 3 5
2 4 6
_
1
s
6
_
+
_
=
1
s
_
_
1 +
1
s
2
_
1
2
_
=
1
s
_
s
2
s
2
+ 1
_
1
2
=
1
s
2
+ 1
(e) L
_
J
0
(at)
_
=
1
a
1
_
_
s
a
_
2
+ 1
=
1
a
_
a
2
s
2
+a
2
_1
2
=
1
s
2
+a
2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 253
_
_
L{f(at)} =
1
a
F
_
s
a
_
, change of scale property
F(s) = L{J
0
(t)} =
1
s
2
+ 1
.
_
_
[4] Evaluate each of the following by use of inverse Laplace transform the-
orems
(a) L
1
_
4s + 12
s
2
+ 8s + 16
_
= L
1
_
4s + 12
(s + 4)
2
_
= L
1
_
4(s + 4) 4
(s + 4)
2
_
= 4L
1
_
1
s + 4
_
4L
1
_
1
(s + 4)
2
_
= 4e
4t
4e
4t
t = 4e
4t
(1 t)
_
_
L
1
_
F(s a)
_
= e
at
f(t), rst translation
L
1
_
1
s
2
_
= t.
_
_
(b) L
1
_
3s + 7
s
2
2s 3
_
= L
1
_
3s + 7
(s 1)
2
4
_
= L
1
_
3(s 1) + 10
(s 1)
2
4
_
= 3L
1
_
s 1
(s 1)
2
4
_
+ 5L
1
_
2
(s 1)
2
4
_
= 3e
t
cosh2t + 5e
t
sinh2t = e
t
[3 cosh2t + 5 sinh2t]
_
_
L
1
_
s
s
2
a
2
_
= cosh at, from Kreyszig Table 6.10
L
1
_
a
s
2
a
2
_
= sinhat.
_
_
L
1
_
se
4s
5
s
2
+ 25
_
= cos 5
_
t
4
5
_
u
_
t
4
5
_
(c)
=
_
_
cos 5
_
t
4
5
_
t >
4
5
0 t <
4
5
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 254
_
_
L
1
_
e
as
F(s)
_
= f(t a)u(t a), second shifting property
L
1
_
s
s
2
+ 25
_
= cos 5t,
u(t a) =
_
0 t < a
1 t > a
_
_
(d) L
1
_
s + 1
s
2
+s + 1
_
= L
1
_
s + 1
(s +
1
2
)
2
+
3
4
_
= L
1
_
s +
1
2
+
1
2
(s +
1
2
)
2
+
3
4
_
= L
1
_
s +
1
2
(s +
1
2
)
2
+
3
4
_
+
1
3
L
1
_
3
2
(s +
1
2
)
2
+
3
4
_
= e
t
2
cos
3t
2
+
1
3
e
t
2
sin
3t
2
=
e
t
2
3
_
3 cos
3t
2
+ sin
3t
2
_
_
_
L
1
{F(s a)} = e
at
f(t), rst shifting property
L
1
_
s
s
2
+a
2
_
= cos at, L
1
_
a
s
2
+a
2
_
= sinat
_
_
(e) L
1
_
4s 2
(s
2
+ 1)
2
_
=?
L
1
_
1
s
2
+ 1
_
= sint
L
1
_
4s 2
s
2
+ 1
_
= 4L
1
_
s
s
2
+ 1
_
2L
1
_
1
s
2
+ 1
_
= 4 cos t 2 sint
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 255
L
1
_
4s 2
(s
2
+ 1)
2
_
= (4 cos t 2 sint) sint
=
t
_
0
(4 cos 2 sin) sin(t )d
=
1
2
t
_
0
{4[sint + sin(t 2)] 2[cos t + cos(2 t)]} d
= 2
_
sint +
cos(t 2)
2
_
t
0
+
_
cos t
sin(2 t)
2
_
t
0
= 2t sint + cos(t) cos t +t cos t
sint
2
+
sin(t)
2
= 2t sint sint +t cos t
(f) L
1
_
1
(s
2
+ 1)
3
_
=?
L
1
_
1
(s
2
+ 1)
_
= sint
L
1
_
1
(s
2
+ 1)
2
_
= sint sint =
t
_
0
sin sin(t )d
=
1
2
t
_
0
[cos(2 t) cos t] d
_
sinxsiny =
1
2
[cos(x +y) + cos(x y)]
_
=
1
2
_
sin(2 t)
2
cos t
_
t
0
=
1
2
_
sint
2
sin(t)
2
t cos t
_
=
1
2
[sint t cos t]
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 256
L
1
_
1
(s
2
+ 1)
3
_
=
_
sint t cos t
2
_
sint
=
t
_
0
_
sin cos
2
_
sin(t )d
=
1
4
t
_
0
[cos t + cos(2 t) sint sin(t 2)
. .
by parts
]d
_
_
cos y sinx =
1
2
[sin(x +y) + sin(x y)]
by parts : uv
_
vdu, u = , du = d
dv = sin(t 2)d, v =
cos(t 2)
2
_
_
=
1
4
_
cos t +
sin(2 t)
2
2
sint
2
cos(t 2)
2
sin(t 2)
2 2
_
t
0
=
1
4
_
t cos t +
sint
2
sin(t)
2
t
2
sint
2
t cos(t)
2
sin(t)
4
+
sint
4
_
=
t cos t
4
t
2
sint
8
t cos t
8
+
3 sint
8
=
3 sint
8
3t cos t
8
t
2
sint
8
L
1
_
3s + 1
(s 1)(s
2
+ 1)
_
= L
1
_
2
s 1
_
+L
1
_
2s + 1
s
2
+ 1
_
(g)
= 2L
1
_
1
s 1
_
+L
1
_
1
s
2
+ 1
_
2L
1
_
s
s
2
+ 1
_
= 2e
t
+ sint 2 cos t
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 257
_
_
3s + 1
(s 1)(s
2
+ 1)
=
A
s 1
+
Bs +C
s
2
+ 1
=3s + 1 = (s
2
+ 1)A+ (s 1)(Bs +C)
= s
2
(A+B) +s(C B) +AC
=A+B = 0, C B = 3, AC = 1
A = 2, B = 2, C = 1
_
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 258
10.5 Application of Laplace Transforms in the Solution of
Ordinary Dierential Equations (Chapter 6)
Use Laplace transforms to solve the following:
[1] y
(t) + y(t) = 1 given y(0) = 1 y
(0) = 0. Taking the Laplace
transform of both sides of the dierential equation yields:
_
s
2
y(s) s y(0)
..
1
y
(0)
. .
0
+ y(s) =
1
s
=s
2
y(s) s + y(s) =
1
s
= y(s)
_
s
2
+ 1
= s +
1
s
= y(s) =
s +
1
s
s
2
+ 1
=
1
s
=y(t) = L
1
_
y(s)
_
= L
1
_
1
s
_
= 1
[2] 2x
(t) + 3x(t) = e
4t
given x(0) = 5.
Taking the Laplace transforms
2
_
s x(s) x(0)
..
5
+ 3 x(s) =
1
s 4
= x(s)[2s + 3] 10 =
1
s 4
= x(s) =
_
10 +
1
s 4
_
1
2s + 3
=
10
2s + 3
+
1
(s 4)(2s + 3)
=
5
s +
3
2
2
11
2s + 3
+
1
11
s 4
=
5
s +
3
2
1
11
s +
3
2
+
1
11
s 4
=
_
54
11
_
1
s +
3
2
+
_
1
11
_
1
s 4
=x(t) = L
1
_
x(s)
_
=
54
11
L
1
_
1
s +
3
2
_
+
1
11
L
1
_
1
s 4
_
=x(t) =
1
11
_
54e
3
2
t
+e
4t
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 259
[3] y
+y = t given y(0) = 1, and y
(0) = 2.
Taking the Laplace transform of both sides of the ordinary dierential equa-
tion and using the given conditions yields:
L
_
y
+y
_
= L{t} =L
_
y
_
+L{y} = L{t}
=
_
s
2
y(s) s y(0)
..
1
y
(0)
. .
2
+ y(s) =
1
s
2
=s
2
y(s) s + 2 + y(s) =
1
s
2
= y(s)
_
s
2
+ 1
=
1
s
2
+s 2
= y(s) =
1
s
2
(s
2
+ 1)
+
s 2
s
2
+ 1
=
1
s
2
1
s
2
+ 1
+
s
s
2
+ 1
2
s
2
+ 1
=y(t) = L
1
_
1
s
2
_
3L
1
_
1
s
2
+ 1
_
+L
1
_
s
s
2
+ 1
_
=y(t) = t 3 sint + cos t
[4] x
(t) 3x(t) = te
2t
given x(0) = 0.
_
s x(s) x(0)
..
0
3 x(s) =
1
(s 2)
2
= x(s)[s 3] =
1
(s 2)
2
= x(s) =
1
(s 3)(s 2)
2
=
1
s 3
1
s 2
1
(s 2)
2
=x(t) = L
1
_
1
s 3
_
L
1
_
1
s 2
_
L
1
_
1
(s 2)
2
_
=x(t) = e
3t
e
2t
te
2t
=x(t) = e
3t
(1 +t)e
2t
[5] y
3y
+ 2y = 4e
2t
given y(0) = 3, and y
(0) = 5.
Taking the Laplace transform of both sides of the dierential equation
yields:
L
_
y
_
3L
_
y
_
+ 2L{y} = 4L
_
e
2t
_
_
L
_
e
at
_
=
1
s a
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 260
=
_
s
2
y(s) s y(0)
..
3
y
(0)
. .
5
_
3
_
s y(s) y(0)
..
3
_
+ 2 y(s) = 4
_
1
s 2
_
=
_
s
2
y(s) + 3s 5
3 [s y(s) + 3] + 2 y(s) =
4
s 2
= y(s)
_
s
2
3s + 2
_
+ 3s 14 =
4
s 2
= y(s) =
4
(s 2)(s
2
3s + 2)
+
14 3s
s
2
3s + 2
=
20s 3s
2
24
(s 2)
2
(s 1)
=
A
s 1
+
B
s 2
+
C
(s 2)
2
=
7
s 1
+
4
s 2
+
4
(s 2)
2
_
_
20s 3s
2
24 = A(s 2)
2
+B(s 2)(s 1) +C(s 1)
= s
2
(A+B) s(4A+ 3B C) + 4A+ 2B C
A+B = 3, 4A+ 3B C = 20, 4A+ 2B C = 24
A = 7, B = 4, C = 4
_
_
=y(t) = L
1
_
7
s 1
_
+L
1
_
4
s 2
_
+L
1
_
4
(s 2)
2
_
_
_
L
1
_
F(s a)
_
= e
at
f(t) shifting property
L
1
_
4
s
2
_
= 4t
_
_
=y(t) = 7e
t
+ 4e
2t
+ 4te
2t
[6] y
IV
(t) + 2y
(t) + y(t) = sint given y(0) = 1, y
(0) = 2, y
(0) =
3 and y
(0) = 0.
_
L
_
f
(n)
(t)
_
= s
n
F(s) s
n1
f(0) s
n2
f
(0) f
(n1)
(0)
_
_
s
4
y(s) s
3
y(0)
..
1
s
2
y
(0)
. .
2
s y
(0)
. .
3
y
(0)
. .
0
_
+ 2
_
s
2
y(s) s y(0)
..
1
y
(0)
. .
2
_
+ y(s) =
1
s
2
+ 1
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 261
=
_
s
4
y(s) s
3
+ 2s
2
3s
+ 2
_
s
2
y(s) s + 2
_
+ y(s) =
1
s
2
+ 1
= y(s)
_
s
4
+ 2s
2
+ 1
. .
(s
2
+1)
2
=
1
s
2
+ 1
+s
3
2s
2
+ 5s 4
= y(s) =
1
(s
2
+ 1)
3
+
s
3
2s
2
+ 5s 4
(s
2
+ 1)
2
=
1
(s
2
+ 1)
3
+
(s
3
+s) 2(s
2
+ 1) + 4s 2
(s
2
+ 1)
2
=
1
(s
2
+ 1)
3
+
s
s
2
+ 1
2
s
2
+ 1
+
4s 2
(s
2
+ 1)
2
L
1
_
1
(s
2
+ 1)
3
_
=
3
8
sint
3
8
t cos t
1
8
t
2
sint (HW#5 4f)
L
1
_
4s 2
(s
2
+ 1)
2
_
= 2t sint sint +t cos t (HW#5 4e)
=y(t) = L
1
_
y(s)
_
= L
1
_
1
(s
2
+ 1)
3
_
+L
1
_
s
s
2
+ 1
_
2L
1
_
1
s
2
+ 1
_
+L
1
_
4s 2
(s
2
+ 1)
2
_
=
_
3
8
sint
3
8
t cos t
1
8
t
2
sint
_
+ cos t 2 sint
+ [2t sint sint +t cos t]
= cos t +
5
8
t cos t
21
8
sint + 2t sint
t
2
8
sint
=y(t) =
_
1 +
5t
8
_
cos t
_
21
8
2t +
t
2
8
_
sint
[7] A uniform light horizontal beam PQ, of length 2c end supported at P,
carries a load which decreases uniformly from w (newtons/m) at P to zero
at x = c. A point load F (newtons) occurs at a distance b from P. Find
an expression for the displacement at any point in the beam in terms of x.
d
4
y
dx
4
=
1
EI
W(x)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 262
W
P Q
F
c
b
2c
where W(x) =
_
w
w
c
x
_
_
w
w
c
x
_
u(x c) +F(x b),
u(x c) =
_
1 x > c,
0 x < c.
given y(0) = 0, y
(0) = 0, y
(2c) = 0, and y
(2c) = 0.
=
d
4
y
dx
4
=
1
EI
_
w
c
_
c x (c x)u(x c)
_
+F(x b)
_
=
1
EI
_
w
c
_
c x + (x c)u(x c)
_
+F(x b)
_
=EI
_
_
_
s
4
y(s) s
3
y(0)
..
0
s
2
y
(0)
. .
0
s y
(0)
. .
A
y
(0)
. .
B
_
_
_
=
w
c
_
c
s
1
s
2
+
e
cs
s
2
_
+Fe
bs
_
L
1
_
e
as
F(s)
_
= f(t a)u(t a)
L
_
(t a)
_
= e
as
_
EI
_
s
4
y(s) As B
_
=
w
c
_
c
s
1
s
2
+
e
cs
s
2
_
+Fe
bs
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 263
=EI y(s) =
A
s
3
+
B
s
4
+
w
c
_
c
s
5
1
s
6
+
e
cs
s
6
_
+
Fe
bs
s
4
L
1
=EIy(x) =
Ax
2
2
+
Bx
3
6
+
w
c
_
cx
4
24
x
5
120
+
(x c)
5
120
u(x c)
_
+
F(x b)
3
6
u(x b)
Now evaluate A & B
EIy
(x) = Ax +
Bx
2
2
+
w
c
_
cx
3
6
x
4
24
+
(x c)
4
24
u(x c)
_
+
F(x b)
2
2
u(x b)
EIy
(x) = A+Bx +
w
c
_
cx
2
2
x
3
6
+
(x c)
3
6
u(x c)
_
+F(x b)u(x b)
EIy
(x) = B +
w
c
_
cx
x
2
2
+
(x c)
2
2
u(x c)
_
+Fu(x b)
At x = 2c, y
(2c) = 0
=0 =A+ 2Bc +
w
c
_
2c
3
4c
3
3
+
c
3
6
_
+F(2c b)
At x = 2c, y
(2c) = 0
=0 =B +
w
c
_
2c
2
4c
2
2
+
c
2
2
_
+F
=B =
_
wc
2
+F
_
=A = 2
_
wc
2
+F
_
c
w
c
_
5
6
c
3
_
F(2c b)
= wc
2
+ 2cF
5
6
wc
2
F(2c b)
= wc
2
_
1
5
6
_
+Fb
=
wc
2
6
+Fb
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 264
Substituting the value of A and B into the previous result yields:
EIy(x) =
_
wc
2
6
+Fb
_
x
2
2
_
wc
2
+F
_
x
3
6
+
_
cx
4
24
x
5
120
+
(x c)
5
120
u(x c)
_
w
c
+
F(x b)
3
6
u(x b)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 265
B
A
b
c
a
a+b
D
B C
D
O
a
b
c
d
a
b c
p'
1
p'
2
p
1
p
2
c'
10.6 Linear Algebra (Chapter 7)
[1] Consider a vector represented by an arrow running from a point P to a
point Q (P Q). The straight line through P and Q is called the line of
action of the vector, the point P is called the origin of the vector and the
point Q is called the terminus of the vector. (a) If a and b are vectors with
a common origin O and terminuses A and B, in terms of a and b, nd the
vector OC where C is the middle point of AB. (b) If a, b, c and d have
a common origin and terminuses A, B, C, and D, and if b a = c d
show that ABCD is a parallelogram. (c) Prove that the line joining the
middle points of any two sides of a triangle is parallel to the third side, and
is equal in length to one half of the length of the third side. NOTE: You
are not allowed to use a coordinate system to solve the above problems.
(1a) The vectors a and b form the two
sides of a parallelogram. The two lines
drawn from A to B and from O to D
bisect with each other. Hence, the vec-
tor drawn from O to the middle point
of AB is equal to half of vector drawn
from O to D. That is c =
1
2
(a +b).
(1b) From the given condition that b
a = cd, we see that the vector drawn
from A to B and the vector drawn from
D to C are equal: AB = DC. The
condition rewritten in the form bc =
ad shows that CB = DA. The oppo-
site sides are parallel and equal, hence
ABCD is a parallelogram.
(1c) Let the position vectors of points
p
1
and p
2
be denoted by a and b, re-
spectively. The midpoints of the sides
Op
1
and Op
2
(i.e. Op
1
and Op
2
) are
then a/2 and b/2. The vectors drawn
from p
1
to p
2
and from p
1
to p
2
are then
c = ba, c
= b/2a/2 = c/2. Obvi-
ously, c
is parallel to c and |c
| = |c|/2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 266
[2] Show that (A+B)
2
= A
2
+AB+BA+B
2
given that
A =
_
_
2 1 1
1 2 3
2 1 2
_
_
, B =
_
_
1 1 2
2 1 3
2 1 1
_
_
.
A+B =
_
_
3 0 1
1 1 6
0 0 3
_
_
(A+B)
2
= (A+B)(A+B)
=
_
_
3 0 1
1 1 6
0 0 3
_
_
_
_
3 0 1
1 1 6
0 0 3
_
_
=
_
_
9 0 6
2 1 11
0 0 9
_
_
A
2
=
_
_
2 1 1
1 2 3
2 1 2
_
_
_
_
2 1 1
1 2 3
2 1 2
_
_
=
_
_
7 1 1
6 8 1
7 2 9
_
_
AB =
_
_
2 1 1
1 2 3
2 1 2
_
_
_
_
1 1 2
2 1 3
2 1 1
_
_
=
_
_
2 0 6
11 6 1
0 1 1
_
_
BA =
_
_
1 1 2
2 1 3
2 1 1
_
_
_
_
2 1 1
1 2 3
2 1 2
_
_
=
_
_
3 5 0
9 1 11
1 5 3
_
_
B
2
=
_
_
1 1 2
2 1 3
2 1 1
_
_
_
_
1 1 2
2 1 3
2 1 1
_
_
=
_
_
7 4 1
2 0 2
6 4 2
_
_
=A
2
+AB+BA+B
2
=
_
_
9 0 6
2 1 11
0 0 9
_
_
= (A+B)
2
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 267
[3] Use GaussJordan elimination to nd the inverse of
A =
_
_
1 0 2
2 1 3
4 1 8
_
_
.
[A|I] =
_
_
1 0 2 | 1 0 0
2 1 3 | 0 1 0
4 1 8 | 0 0 1
_
_
r
1
r
2
r
3
_
_
1 0 2 | 1 0 0
0 1 1 | 2 1 0
4 1 8 | 0 0 1
_
_
r
1
r
2
2r
1
r
3
_
_
1 0 2 | 1 0 0
0 1 1 | 2 1 0
0 1 0 | 4 0 1
_
_
r
1
r
2
2r
1
r
3
4r
1
_
_
1 0 2 | 1 0 0
0 0 1 | 6 1 1
0 1 0 | 4 0 1
_
_
r
1
r
2
2r
1
+ (r
3
4r
1
)
(1)
_
_
1 0 0 | 11 2 2
0 0 1 | 6 1 1
0 1 0 | 4 0 1
_
_
_
_
1 0 0 | 11 2 2
0 1 0 | 4 0 1
0 0 1 | 6 1 1
_
_
=A
1
=
_
_
11 2 2
4 0 1
6 1 1
_
_
[4] Evaluate
2 1 1 4
2 3 2 5
1 2 3 2
4 3 2 2
.
If we multiply the elements of any row (or column) by a given number and
add to corresponding elements of any other row (or column), then the value
of the determinant remains the same. Now, multiplying the elements of the
rst row by 3, 2, 3, and adding to the elements of the second, third, and
fourth rows, respectively, yields
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 268
2 1 1 4
8 0 5 17
5 0 5 10
2 0 1 10
= (1)
8 5 17
5 5 10
2 1 10
= (1)(8)
5 10
1 10
(5)
5 17
1 10
(2)
5 17
5 10
= 85
[5] Prove that if A is a nonsingular matrix, then
det A
1
=
1
det A
AA
1
= I =
_
_
_
det
_
AA
1
_
= det I = 1
det
_
AA
1
_
= det A det A
1
=det A det A
1
= 1 =det A
1
=
1
det A
[6] Use LU decomposition to nd the inverse of
A =
_
_
2 1 1
4 1 3
2 4 0
_
_
.
A =LU =A
1
= U
1
L
1
[A|I] =
_
_
2 1 1 | 1 0 0
4 1 3 | 0 1 0
2 4 0 | 0 0 1
_
_
_
_
2 1 1 | 1 0 0
0 3 1 | 2 1 0
0 5 1 | 1 0 1
_
_
_
_
2 1 1 | 1 0 0
0 3 1 | 2 1 0
0 0 8/3 | 7/3 5/3 1
_
_
= [U|L
1
]
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 269
Now obtain U
1
_
_
2 1 1 | 1 0 0
0 3 1 | 0 1 0
0 0 8/3 | 0 0 1
_
_
_
_
2 1 0 | 1 0 3/8
0 3 0 | 0 1 3/8
0 0 1 | 0 0 3/8
_
_
_
_
2 0 0 | 1 1/3 4/8
0 1 0 | 0 1/3 1/8
0 0 1 | 0 0 3/8
_
_
_
_
1 0 0 | 1/2 1/6 1/4
0 1 0 | 0 1/3 1/8
0 0 1 | 0 0 3/8
_
_
=A
1
= U
1
L
1
=
_
_
1/2 1/6 1/4
0 1/3 1/8
0 0 3/8
_
_
_
_
1 0 0
2 1 0
7/3 5/3 1
_
_
A
1
=
_
_
3/4 1/4 1/4
3/8 1/8 1/8
7/8 5/8 3/8
_
_
[7] Find the eigenvalues and eigenvectors of
A =
_
_
5 1 0
0 4 1
0 1 4
_
_
.
5 1 0
0 4 1
0 1 4
= 0
=(5 )
4 1
1 4
= (5 )
_
(4 )
2
1
_
= 0
=
1
= 5, 4 = 1
_
2
= 3
3
= 5
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 270
=Eigenvalues :
1
= 5,
2
= 3,
3
= 5
For
1
=
3
= 5
_
_
0 1 0
0 1 1
0 1 1
_
_
_
_
0 1 0
0 1 1
0 0 0
_
_
_
_
0 1 0
0 0 1
0 0 0
_
_
=x
2
= x
3
= 0
The corresponding eigenvector is:
_
_
x
1
0
0
_
_
= x
1
_
_
1
0
0
_
_
or simply
_
_
1
0
0
_
_
For
2
= 3
_
_
2 1 0
0 1 1
0 1 1
_
_
_
_
2 1 0
0 1 1
0 0 0
_
_
x
2
= x
3
, 2x
1
= x
2
= x
3
=x
1
=
x
3
2
The corresponding eigenvector is:
_
_
x
3
/2
x
3
x
3
_
_
= x
3
_
_
1/2
1
1
_
_
or
_
_
1/2
1
1
_
_
=Eigenvectors :
_
_
1
0
0
_
_
,
_
_
1/2
1
1
_
_
[8] Find the eigenvalues and eigenvectors of A =
_
cos sin
sin cos
_
.
cos sin
sin cos
= 0 =(cos )
2
+ sin
2
= 0
=cos
2
2cos +
2
+ sin
2
= 0 =1 2cos +
2
= 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 271
= =
2 cos
4 cos
2
4
2
=
2 cos
_
4 sin
2
2
= cos i sin
_
e
i
= cos +i sin
_
= = e
i
_
cos sin
sin cos
_ _
x
1
x
2
_
= 0 =
_
_
_
(cos )x
1
(sin)x
2
= 0
(sin)x
1
+ (cos )x
2
= 0
_
For = e
i
_
=
_
_
_
_
cos e
i
_
x
1
(sin)x
2
= 0
(sin)x
1
+
_
cos e
i
_
x
2
= 0
=
_
_
_
i(sin)x
1
(sin)x
2
= 0
(sin)x
1
i(sin)x
2
= 0
=x
2
= ix
1
The corresponding eigenvector is:
_
x
1
x
2
_
=
_
x
1
ix
1
_
= x
1
_
1
i
_
or simply
_
1
i
_
.
_
For = e
i
_
=
_
_
_
_
cos e
i
_
x
1
(sin)x
2
= 0
(sin)x
1
+
_
cos e
i
_
x
2
= 0
_
e
i
= cos i sin
_
=
_
_
_
i(sin)x
1
(sin)x
2
= 0
(sin)x
1
+i(sin)x
2
= 0
=x
2
= ix
1
The corresponding eigenvector is:
_
x
1
x
2
_
=
_
x
1
ix
1
_
= x
1
_
1
i
_
or simply
_
1
i
_
.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 272
[9] Use properties of the transpose to show that A =
_
cos sin
sin cos
_
is
an orthogonal matrix.
A
T
A =
_
cos sin
sin cos
_ _
cos sin
sin cos
_
=
_
cos
2
+ sin
2
0
0 sin
2
+ cos
2
_
=
_
1 0
0 1
_
= I
_
For an orthogonal matrix A
T
= A
1
_
=A is an orthogonal matrix
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 273
f(t)
1
-T/4 -T/2 T/4 T/2
-1
t
0
10.7 Fourier Series, Integrals, and Transforms (Chapter 8)
[1] Find the period of the function f(t) = (10 cos t)
2
.
f(t) = 100 cos
2
t, cos
2
=
1
2
(1 + cos 2)
=f(t) =
100
2
(1 + cos 2t) = 50 + 50 cos 2t
Since a constant is a periodic function of period P for any value of P and
the period of cos 2t is , we conclude that the period of f(t) is .
[2] Find the Fourier series for the function whose waveform is (Hint: P =
T [T/2, T/2])
The function f(t) can be expressed analytically as
f(t) =
_
_
1 +
4t
T
T
2
t < 0
1
4t
T
0 t <
T
2
f(t) = a
0
+
n=1
_
a
n
cos
2n
T
t +b
n
sin
2n
T
t
_
a
0
=
1
T
T/2
_
T/2
f(t)dt =
1
T
0
_
T/2
_
1 +
4t
T
_
dt +
1
T
T/2
_
0
_
1
4t
T
_
dt
=
1
T
_
t +
2t
2
T
_
0
T/2
+
1
T
_
t
2t
2
T
_
T/2
0
=
1
T
_
T
2
T
2
_
+
1
T
_
T
2
T
2
_
= 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 274
a
n
=
2
T
T/2
_
T/2
f(t) cos
_
2n
T
t
_
dt
=
2
T
T/2
_
T/2
cos
_
2n
T
t
_
dt +
2
T
0
_
T/2
4t
T
cos
_
2n
T
t
_
dt
2
T
T/2
_
0
4t
T
cos
_
2n
T
t
_
dt
The rst integral on the righthand side equals zero:
=a
n
=
8
T
2
0
_
T/2
t cos
_
2n
T
t
_
dt
8
T
2
T/2
_
0
t cos
_
2n
T
t
_
dt
Letting t = in the rst integral, we get:
a
n
=
8
T
2
0
_
+T/2
() cos
_
2n
T
()
_
(d)
8
T
2
T/2
_
0
t cos
_
2n
T
t
_
dt
=
8
T
2
0
_
T/2
cos
_
2n
T
_
d
8
T
2
T/2
_
0
t cos
_
2n
T
t
_
dt
=
8
T
2
T/2
_
0
cos
_
2n
T
_
d
8
T
2
T/2
_
0
t cos
_
2n
T
t
_
dt
=
16
T
2
T/2
_
0
t cos
_
2n
T
t
_
dt
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 275
1
f(t)
-T 0 T
t
1/2
-1/2
0
-T
T
t
g(t)=f(t)-1/2
=
16
T
2
_
_
T
2n
t sin
_
2n
T
t
_
T/2
0
T
2n
T/2
_
0
sin
_
2n
T
t
_
dt
_
_
=
16
T
2
_
0 +
_
T
2n
_
2
cos
_
2n
T
t
_
T/2
0
_
=
16
T
2
_
_
T
2n
_
2
_
cos n 1
_
=
4
n
2
2
_
1 cos n
=
4
n
2
2
_
1 (1)
n
=a
n
=
_
_
_
0 n even
8
n
2
2
n odd
b
n
=
2
T
T/2
_
T/2
f(t) sin
_
2n
T
t
_
dt = 0,
because f(t) = f(t), even function.
=f(t) =
8
2
_
cos
_
2
T
t
_
+
1
3
2
cos
_
6
T
t
_
+
1
5
2
cos
_
10
T
t
_
+
_
[3] Find the Fourier series for the function (P = T)
Let w
0
=
2
T
. Also, because g(t) has odd symmetry,
g(t) =
n=1
b
n
sinnw
0
t
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 276
1
0 T
t
f(t)
-T
1
-T 0 T
t
g(t)=1-f(t)
b
n
=
4
T
T/2
_
0
g(t) sin(nw
0
t)dt, g(t) =
1
2
t
T
(0 < t < T)
=
4
T
T/2
_
0
_
1
2
t
T
_
sin(nw
0
t)dt
=
4
T
_
_
1
2
t
T
_
cos nw
0
t
nw
0
sinnw
0
t
T(nw
0
)
2
_
T/2
0
=
1
n
Thus, g(t) =
1
n=1
1
n
sinnw
0
t
=f(t) =
1
2
+
1
_
sinw
0
t +
1
2
sin2w
0
t +
1
3
sin3w
0
t +
_
[4] Using the result of problem 3, nd the Fourier series for the function
f(t) shown below
g(t) = 1 f(t) =
1
2
+
1
n=1
1
n
sin(nw
0
t), w
0
=
2
T
=f(t) = 1
1
2
1
n=1
1
n
sin(nw
0
t)
=
1
2
1
_
sinw
0
t +
1
2
sin2w
0
t +
1
3
sin3w
0
t +
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 277
/2 0 /2
t
f(t)
1
-1
[5] Given the function f(t) =
_
_
_
0 0 < t <
2
,
1
2
< t < ,
expand f(t) in a Fourier
sine series and draw the corresponding periodic extension of f(t).
Fourier sine series : f(t) =
n=1
b
n
sin(nt)
b
n
=
2
_
0
f(t) sin(nt)dt =
2
_
/2
sin(nt)dt
=
2
n
cos(nt)
/2
=
2
n
_
cos(n) cos
_
n
2
_
_
=
_
_
2
n
n = 1, 3, 5,
4
n
n = 2, 6, 10,
0 n = 4, 8, 12,
=f(t) =
2
_
sint +
1
3
sin3t +
1
5
sin5t +
_
_
sin2t +
1
3
sin6t +
1
5
sin10t +
_
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 278
P(t)
-d/2
0
d/2
1
t
f(t)
t
0
e
at
e
-at
[6] Find the fourier transform of p(t) =
_
_
_
1 |t| <
d
2
,
0 |t| >
d
2
.
p(w) = F
_
p(t)
_
=
p(t)e
jwt
dt =
d/2
_
d/2
e
jwt
dt
=
1
jw
e
jwt
d/2
d/2
=
1
jw
_
e
jwd/2
e
jwd/2
_
_
e
it
= cos t +i sint
_
=
2
w
sin
_
wd
2
_
[7] Find the Fourier transform of f(t) = e
a|t|
, where a > 0.
f(t) = e
a|t|
=
_
e
at
t > 0
e
at
t < 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 279
f(w) =
f(t)e
jwt
dt =
0
_
e
at
e
jwt
dt +
_
0
e
at
e
jwt
dt
=
0
_
e
(a+jw)t
dt +
_
0
e
(a+jw)t
dt
=
1
a +jw
+
1
a +jw
=
2a
a
2
+w
2
[8] If
_
0
f(x) cos ax dx =
_
1 a 0 a 1,
0 a > 1,
nd f(x).
Let
f(a) =
_
2
_
0
f(x) cos ax dx
and choose
f(a) =
_
_
_
_
2
(1 a) 0 a 1
0 a > 1
Then : f(x) =
_
2
_
0
f(a) cos ax da =
_
2
1
_
0
_
2
(1 a) cos ax da
=
2
1
_
0
(1 a) cos ax da =
2(1 cos x)
x
2
[9] Show that
_
0
sin
2
u
u
2
du =
2
given that
_
0
f(x) cos ax dx =
_
1 a 0 a 1,
0 a > 1.
Using the result from problem #8
2
_
0
1 cos x
x
2
cos ax dx =
_
1 a 0 a 1
0 a > 1
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 280
Taking the limit as a 0
+
, we nd
_
0
1 cos x
x
2
dx =
2
, sin
2
x =
1
2
(1 cos 2x)
=
_
0
2 sin
2
(
x
2
)
x
2
dx =
2
, let x = 2u
=
_
0
sin
2
u
u
2
du =
2
[10] If F
_
f(t)
_
=
f() and
f() can be dierentiated everywhere n times,
show that
F
_
t
p
f(t)
_
=
1
(j)
p
d
p
f()
d
p
for every p n.
Since F
_
jtf(t)
_
=
f
(w) Frequency domain dierentiation
F
_
(jt)
2
f(t)
_
=
d
2
f(w)
dw
2
F
_
(jt)
p
f(t)
_
=
d
p
f(w)
dw
p
, p n
_
f(w) =
f(t)e
jwt
dt
=
d
2
f(w)
dw
2
=
d
2
dw
2
f(t)e
jwt
dt =
f(t)
d
2
dw
2
_
e
jwt
_
dt
=
[jt]
2
f(t)e
jwt
dt = F
_
(jt)
2
f(t)
_
_
_
=
1
(j)
p
F
_
(jt)
p
f(t)
_
=
1
(j)
p
d
p
f(w)
dw
p
=F
_
t
p
f(t)
_
=
1
(j)
p
d
p
f(w)
dw
p
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 281
10.8 Partial Dierential Equations (Chapter 9)
[1] Classify each of the following partial dierential equations as elliptic,
hyperbolic or parabolic
(a)
2
u
t
2
= k
2
2
u
x
2
_
A
2
u
x
2
+B
2
u
xy
+C
2
u
y
2
+D
u
x
+E
u
y
+Fu = G
_
A = k
2
, B = 0, C = 1
=B
2
4AC = 4k
2
> 0.
The equation is hyperbolic
(b)
2
u
x
2
+ 3
2
u
xy
+ 4
2
u
y
2
+ 5
u
x
2
u
y
+ 4u = 2x 3y,
A = 1, B = 3, C = 4
=B
2
4AC = 7 < 0.
The equation is elliptic
(c) x
2
u
x
2
+y
2
u
y
2
+ 3y
2
u
x
= 0.
A = x, B = 0, C = y
=B
2
4AC = 4xy.
In the region xy > 0 the equation is elliptic. In the region xy < 0 the
equation is hyperbolic. If xy = 0, the equation is parabolic
[2] Solve the following boundaryvalue problem by the method of separa-
tion of variables
u
x
= 4
u
y
, u(0, y) = 8e
3y
+ 4e
5y
.
Assume u(x, y) = X(x)Y (y).
X
(x)Y (y) = 4X(x)Y
(y)
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 282
=
X
4X
=
Y
Y
= c
X
= 4cX =X = Ae
4cx
& Y
= cY =Y = Be
cy
=u(x, y) =
_
Ae
4cx
__
Be
cy
) = ae
c(4x+y)
(a = AB)
By the principle of superposition u(x, y) = ae
c
1
(4x+y)
+be
c
2
(4x+y)
is also a
solution.
b.c. u(0, y) = 8e
3y
+ 4e
5y
= ae
c
1
y
+be
c
2
y
.
a = 8, c
1
= 3, b = 4, c
2
= 5
=u(x, y) = 8e
3(4x+y)
+ 4e
5(4x+y)
=u(x, y) = 8e
12x3y
+ 4e
20x5y
[3] Solve by the method of separation of variables
u
t
= 2
2
u
x
2
, 0 < x < 3, t > 0
given that u(0, t) = u(3, t) = 0, u(x, 0) = 5 sin4x 3 sin8x + 2 sin10x,
|u(x, t)| < M, where the last condition states that u is bounded for 0 <
x < 3, t > 0.
Assume u(x, t) = X(x)T(t)
XT
= 2X
T
=
X
X
=
T
2T
=
2
(Note: if we use +
2
, the resulting solution does not satisfy the boundedness
condition for real values of .)
X
+
2
X = 0 =X = A
1
cos x +B
1
sinx
T
+ 2
2
T = 0 =T = c
1
e
2
2
t
=u(x, t) = c
1
e
2
2
t
_
A
1
cos x +B
1
sinx
= e
2
2
t
_
Acos x +Bsinx
From u(0, t) = Ae
2
2
t
= 0 A = 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 283
=u(x, t) = Be
2
2
t
sinx
From u(3, t) = Be
2
2
t
sin3 = 0 (B = 0)
=sin3 = 0 3 = n =
n
3
(n = 0, 1, 2, )
=u(x, t) = Be
2
_
n
2
2
9
_
t
sin
nx
3
Also, by the principle of superposition
u(x, t) = b
1
e
2n
2
1
2
t
9
sin
n
1
x
3
+b
2
e
2n
2
2
2
t
9
sin
n
2
x
3
+b
3
e
2n
2
3
2
t
9
sin
n
3
x
3
is also a solution. From the last boundary condition:
u(x, 0) = b
1
sin
n
1
x
3
+b
2
sin
n
2
x
3
+b
3
sin
n
3
x
3
= 5 sin4x 3 sin8x + 2 sin10x
This is possible if and only if:
_
b
1
= 5 n
1
= 12
b
2
= 3 n
2
= 24
b
3
= 2 n
3
= 30
=u(x, t) = 5e
32
2
t
sin4x3e
128
2
t
sin8x+2e
200
2
t
sin10x
[4] Apply Laplace transformations to show that the Laplace time solution
of the following boundary value problem
u
t
= k
2
u
x
2
,
u(a, t) = Q(t), u(x, 0) = 0, |u(x, t)| < M, is
u(x, s) = Qe
(xa)
s/k
.
Taking Laplace transforms w.r.t. t yields:
_
s u(x, s) u(x, 0)
_
= k
d
2
u(x, s)
dx
2
, u(x, 0) = 0
=
d
2
u(x, s)
dx
2
s
k
u(x, s) = 0
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 284
= u(x, s) = Ae
s/kx
+Be
s/kx
From the boundedness condition, we require A = 0
= u(x, s) = Be
s/kx
From the boundary condition
u(a, s) = L
_
Q(t)
_
= Q
= u(a, s) = Be
s/ka
= Q
=B = Qe
s/ka
= u(x, s) = Qe
(xa)
s/k
[5] In the theory of neutron slowing down, one encounters the equation
()
= D
x
2
(0 < ),
where is a logarithmic energy variable, D is the diusion coecient, and
() is a known positive function. Solve this equation by the method of
Fourier transformations for an innite medium (in x) subject to the initial
condition: (0, x) = (x).
Taking Fourier transforms with respect to x yields:
()
d
(, w)
d
= Dw
2
(, w)
=
d
(, w)
(, w)
= Dw
2
d
()
_
f(w) =
f(x)e
jwx
dx, & f(x) =
1
2
f(w)e
jwx
dw
F
_
f
(x)
_
= w
2
f(w)
_
_
Integrate and let
_
d
()
= (), 0 < <
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 285
=ln
(, w) = Dw
2
() +A(w)
=
(, w) = A
(w) exp
_
Dw
2
()
From the initial condition
F{(0, x)} = F{(x)}
=
(0, w) =
(x)e
jwx
dx = 1
At = 0 (0) =
0
_
0
d
()
= 0
=
(0, w) = 1 = A
(w)e
0
=A
(w) = 1
(, w) = exp
_
Dw
2
()
_
=(, x) = F
1
_
exp
_
Dw
2
()
__
=
1
2
e
Dw
2
()
e
jwx
dw
=
1
2
_
Dw
2
()jwx
dw
Dw
2
() jwx =
_
_
D()w
jx
2
_
D()
_
2
+
x
2
4D()
=(, x) =
1
2
e
x
2
4D()
D()w
jx
2
D()
_
2
dw
let z =
_
D()w
jx
2
_
D()
=dz =
_
D()dw =dw =
dz
_
D()
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 286
=(, x) =
1
2
1
_
D()
exp
_
x
2
4D()
_
e
z
2
dz
. .
_
_
e
z
2
dz =
2
erf[z], erf[] = 1, erf[] = 1
_
=(, x) =
e
x
2
4D()
_
4D()
where () =
_
d
()
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 287
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 288
References
Abramowitz, M. and I. A. Stegun, Handbook of Mathematical Functions
with Formulas, Graphs, and Mathematical Tables, National
Bureau of Standards, Wileys, 1972.
Arfken, G., Mathematical Methods for Physics, 3rd Edition, Academic
Press, 1985.
Bois, G. P., Tables of Indenite Integrals, Dover Publications, 1961.
Borisenko, A. I. and I. E. Tarapov, Vector and Tensor Analysis with Ap-
plications, Dover, 1968.
Bracewell, R. N., The Fourier Transform and Its Applications, 2nd Edition,
McGrawHill, 1986.
Broman, A., Intriduction to Partial Dierential Equations from Fourier
Series to Boundary-Value Problems, Dover, 1970.
Bowman, F., Introduction to Bessel Functions, Dover, 1958.
Carslaw, H. S., An Introduction to the Theory of Fouriers Series and In-
tegrals, 3rd Edition, Dover, 1950.
Churchill, R. V., Operational Mathematics, 3rd Edition, McGrawHill,
1972.
Courant, H., Methods of Mathematical Physics, Voloumes I & II, 3rd Edi-
tion, Wiley, 1966.
Day, W. D., Tables of Laplace Transforms, London Ilie Books LTD, 1966.
Duy, D. G., Transform Methods for Solving Partial Dierential Equations,
CRC Press, 1994.
Edwards, Jr., C. H., Advanced Calculus of Several Variables, Dover, 1973.
Erdelyi, A., Tables of Integral Transforms, Vol. I, McGrawHill, 1954.
Friedman, B. Principles and Techniques of Applied Mathematics, Dover,
1990.
Garabedian, P. R., Partial Dierential Equations, 2nd Edition, Chelses
Publications, 1986.
Gradshteyn, I. S. and I. M. Ryzhik, Table of Integrals, Series, and Products,
Academic Press, 1980.
Hildebrand, F. B. Advanced Calculus for Applications, 2nd Edition, Pren-
tice Hall, 1976.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 289
Hopf, L., Introduction to the Dierential Equations of Physics, Dover, 1948.
Kahn, P. B., Mathematical Methods for Scientists & Engineers Linear
and Nonlinear Systems, Wiley, 1990.
Kevorkian, J., Partial Dierential Equations Analytical Solution Tech-
niques, Wadsworth & Brooks/Cole, 1990.
Kreyszig, E., Advanced Engineering Mathematics, 7th Edition, Wiley, 1993.
Logan, J. D., Applied Mathematics, Wiley, 1997.
MyintU, T. and L. Debnath, Partial Dierential Equations for Scientists
and Engineers, 3rd Edition, North Holand, 1987.
Nixon, F. E., Handbook of Laplace Transformation, Prentice Hall, 1960.
Oberhettinger, F. and L. Badii, Tables of Laplace Transforms, Springer
Verlag, 1973.
ONeil, P. V., Advanced Engineering Mathematics, 4th Edition, Interna-
tional Thomson Publishing, 1995.
Pipes, L. A. and L. R. Harvill, Applied Mathematics for Engineers and
Physicists, 3rd Edition, McGrawHill, 1970.
Rainville, E. D. and P. E. Bedient, A Short Course in Dierential Equations,
5th Edition, MacMillan Publishing, 1974.
Reynolds, W. C., Solution of Partial Dierential Equations, Class Notes,
Department of Mechanuical Engineering, Stanford University.
Roberts, G.E. and H. Kaufman, Table of Laplace transforms, W. B. Saun-
ders Co., 1966.
Seaborn, J. B., Hypergeometric Functions and Their Applications, Text in
Applied Mathematics 8, SpringerVerlag, 1991.
Sneddon, I. N., The Use of Integral Transform, McGrawHill, 1972.
Sokolniko, I. S. and R. M. Redheer, Mathematics of Physics and Modern
Engineering, 2nd Edition, McGrawHill, 1966.
Spiegel, M. R., Laplace Transforms, Schaums Outline Series, 1990.
Strang, G., Linear Algebra and Its Applications, 2nd Edition, Academic
Press, 1980.
Tenenbaum, M. and H. Pollard, Ordinary Dierential Equations, Dover,
1963.
Watson, G. N., A Treatise on the Theory of Bessel Functions, Cambridge
University Press, 1980.
Weinberger, H. F., A First Course in Partial Dierential Equations with
Complex Variables and Transform Methods, Blaisdell Publish-
ing, 1965.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 290
Widder, D. V., An Intriduction to Transform Theory, Academic Press,
1971.
Wylie, C. R., Advanced Engineering Mathematic, 4th Edition, McGraw
Hill, 1975.
Zachmanoglou, E. C. and D. W. Thoe, Introduction to Partial Dierential
Equations with Applications, Dover, 1986.
Zaudered, E., Partial Dierential Equations of Applied Mathematics, 2nd
Edition, Wiley, 1989.
Zwillinger, D., Handbook of Dierential Equations, 2nd Edition, Academic
Press, 1992.
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 291
C.V. CHRYSIKOPOULOS: ENGINEERING APPLIED MATHEMATICS 292
You might also like
- Adewale Composed PDFDocument203 pagesAdewale Composed PDFShotonwa Ridwan100% (1)
- Windmill Tutorial 13Document6 pagesWindmill Tutorial 13Azhar A. QaziNo ratings yet
- Integral Calculus Refresher SetDocument4 pagesIntegral Calculus Refresher SetChristian Dela Vega100% (1)
- Discriminant b2 4acDocument14 pagesDiscriminant b2 4acIr HeriawanNo ratings yet
- Advanced Engineering Math SolutionsDocument7 pagesAdvanced Engineering Math Solutionsblazinlyfe42No ratings yet
- APPLİED MATH. Sean MauchDocument2,321 pagesAPPLİED MATH. Sean MauchHüseyin YıldırımNo ratings yet
- Creative Writing Autobiography PoemDocument1 pageCreative Writing Autobiography PoemMadonna SeixasNo ratings yet
- PDF 38 1 PDFDocument190 pagesPDF 38 1 PDFCharan GorentlaNo ratings yet
- In Jection MouldingDocument21 pagesIn Jection MouldingAbhinandan PatilNo ratings yet
- Mixtures ProblemDocument33 pagesMixtures ProblemAnonymous 2gRlZO9No ratings yet
- 1 2 4 A Circuitcalculations PLTWDocument3 pages1 2 4 A Circuitcalculations PLTWapi-308131962No ratings yet
- Thermo 1 & 2Document4 pagesThermo 1 & 2Oloj YuNo ratings yet
- Final Exam Review Materials Science and Structure of MatterDocument38 pagesFinal Exam Review Materials Science and Structure of MatterNick SoergelNo ratings yet
- 3Document355 pages3phanminh91100% (1)
- Frameworks, Tensegrities, and Symmetry (Robert Connelly, Simon D. Guest)Document299 pagesFrameworks, Tensegrities, and Symmetry (Robert Connelly, Simon D. Guest)Sumit singh100% (1)
- Applied CalculasDocument15 pagesApplied Calculasmohammad rashid tkNo ratings yet
- Surveying Topics FEExam Review 2012 FallDocument17 pagesSurveying Topics FEExam Review 2012 FallGilbert CerezoNo ratings yet
- The Dot and Cross ProductDocument9 pagesThe Dot and Cross ProductVikash SharmaNo ratings yet
- Set 2Document23 pagesSet 2Sherwin Millares100% (1)
- Absolute Value Equations and InequalitiesDocument13 pagesAbsolute Value Equations and InequalitiesAnonymous chEHU2E8PNo ratings yet
- Modern GeometryDocument192 pagesModern GeometryDomingo Serpa VieraNo ratings yet
- Hands-On Kernel Lab: Based On The Yocto Project 1.4 Release (Dylan) April 2013Document39 pagesHands-On Kernel Lab: Based On The Yocto Project 1.4 Release (Dylan) April 2013john bougsNo ratings yet
- Gate Question Papers Download Civil Engineering 2004Document15 pagesGate Question Papers Download Civil Engineering 2004insanelysexyNo ratings yet
- Elementary-Lessons - Text in Electricity and MagnetismDocument557 pagesElementary-Lessons - Text in Electricity and MagnetismDhiraj ChaudharyNo ratings yet
- AP Phys 1 Quiz Rotational MotionDocument15 pagesAP Phys 1 Quiz Rotational MotionWenyang LiNo ratings yet
- Burzynski, Ellis - Fundamentals of MathematicsDocument726 pagesBurzynski, Ellis - Fundamentals of MathematicsFUCKICAONo ratings yet
- Advanced Fluid Mechanics PartDocument9 pagesAdvanced Fluid Mechanics PartkishorebabubhumulaNo ratings yet
- Systems of Two EquationsDocument4 pagesSystems of Two EquationsSara K. RezviNo ratings yet
- Inverse FunctionsDocument53 pagesInverse FunctionsencarNo ratings yet
- Final Exam Review Solutions PDFDocument40 pagesFinal Exam Review Solutions PDFromy321No ratings yet
- S Kuliah05 (3D-Force)Document36 pagesS Kuliah05 (3D-Force)Fattihi EkhmalNo ratings yet
- ASAP Plumbing ServicesDocument10 pagesASAP Plumbing ServicesASAP Service PlumbingNo ratings yet
- SLAM Indoor Navigation PDFDocument2 pagesSLAM Indoor Navigation PDFSedric JonesNo ratings yet
- Mathematicsforen01roseuoft BWDocument536 pagesMathematicsforen01roseuoft BWgowthi1992No ratings yet
- Exam 3 Material Science MATS 2001 UMN Fall 2012Document7 pagesExam 3 Material Science MATS 2001 UMN Fall 2012Zaki Smn100% (1)
- Lec 02 GENG 300 Numerical MethodsDocument44 pagesLec 02 GENG 300 Numerical MethodsislamNo ratings yet
- Plane TrigonometryDocument2 pagesPlane TrigonometryLhee Anne Zha DapdapigNo ratings yet
- Reinforced Concrete Cantilever Beam Analysis and Design (CSA A23.3 14)Document33 pagesReinforced Concrete Cantilever Beam Analysis and Design (CSA A23.3 14)sachin shingadeNo ratings yet
- You Are Here: Skip To Main ContentDocument6 pagesYou Are Here: Skip To Main ContentGokusen GonzalesNo ratings yet
- Engineering Mathematics 1Document2 pagesEngineering Mathematics 1ofreneo_joshua4437No ratings yet
- Table of Contents (Arsh)Document13 pagesTable of Contents (Arsh)Arshid Kalid MagandianNo ratings yet
- Formula Sheet - MathDocument3 pagesFormula Sheet - MathDevansh SharmaNo ratings yet
- 11 Lecture PPT Rectilinear Motion PDFDocument42 pages11 Lecture PPT Rectilinear Motion PDFЦедіе РамосNo ratings yet
- Silicon Photonics Packaging: Ino OffersDocument2 pagesSilicon Photonics Packaging: Ino OffersLau Weng LoonNo ratings yet
- Calculator TechniqueDocument6 pagesCalculator Techniquechristopher salvaNo ratings yet
- Summative Exams For General and Analytical ChemistryFOR STUDENTDocument5 pagesSummative Exams For General and Analytical ChemistryFOR STUDENTsantos earlNo ratings yet
- Accreditation Exam 3Document12 pagesAccreditation Exam 3Andrei AlidoNo ratings yet
- Elec 3202 Chap 6Document67 pagesElec 3202 Chap 6budi_ummNo ratings yet
- Differential Equations TextDocument238 pagesDifferential Equations TextEANo ratings yet
- m255 Notes 2019Document176 pagesm255 Notes 2019Laxmi DeviNo ratings yet
- Introductory Mathematical Analysis For Quantitative Finance: Daniele Ritelli and Giulia SpalettaDocument237 pagesIntroductory Mathematical Analysis For Quantitative Finance: Daniele Ritelli and Giulia SpalettaFrancescoNo ratings yet
- Fundamentals of CFDDocument276 pagesFundamentals of CFDSainath SatishNo ratings yet
- Introductory Mathematical Analysis For Quantitative Finance 081537254x 9780815372547 CompressDocument322 pagesIntroductory Mathematical Analysis For Quantitative Finance 081537254x 9780815372547 CompressSrinivasan K100% (2)
- Erenso Theo Phys I Math MethodsDocument583 pagesErenso Theo Phys I Math Methodsotv101No ratings yet
- Theo Phys I Math Methods PDFDocument575 pagesTheo Phys I Math Methods PDFPrateek_14No ratings yet
- 5-QUESTION PAPER Question Bank PDFDocument119 pages5-QUESTION PAPER Question Bank PDFVARUNNo ratings yet
- Linear Algebra Lankham Et Al 2011Document247 pagesLinear Algebra Lankham Et Al 2011joderparaelnombreNo ratings yet
- Mat67 Course NotesDocument252 pagesMat67 Course NotesnweigandNo ratings yet
- Mat67 Course NotesDocument252 pagesMat67 Course NotesexplorienNo ratings yet
- Awo, Part I by Awo Fa'lokun FatunmbiDocument7 pagesAwo, Part I by Awo Fa'lokun FatunmbiodeNo ratings yet
- Quadratic SDocument20 pagesQuadratic SAnubastNo ratings yet
- Damage To Bottom Ash Handling SysDocument6 pagesDamage To Bottom Ash Handling SyssanjeevchhabraNo ratings yet
- Theory of Construction of The Giza Plateau Pyramids (Original Title Hypothesis of Construction of The Pyramids of The Valley of Gizeh (Giza)Document15 pagesTheory of Construction of The Giza Plateau Pyramids (Original Title Hypothesis of Construction of The Pyramids of The Valley of Gizeh (Giza)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Tourism and GastronomyDocument245 pagesTourism and GastronomySakurel ZenzeiNo ratings yet
- Dr. Babasaheb Ambedkar Technological UniversityDocument3 pagesDr. Babasaheb Ambedkar Technological UniversityalfajNo ratings yet
- Trading Rules To Successful ProfitsDocument89 pagesTrading Rules To Successful ProfitsOuattaraNo ratings yet
- Matter Around Me: SC1 - Teaching Science in ElementaryDocument27 pagesMatter Around Me: SC1 - Teaching Science in ElementaryYanna Marie Porlucas Macaraeg50% (2)
- Standalone Financial Results, Limited Review Report For December 31, 2016 (Result)Document4 pagesStandalone Financial Results, Limited Review Report For December 31, 2016 (Result)Shyam SunderNo ratings yet
- Bsa2105 FS2021 Vat Da22412Document7 pagesBsa2105 FS2021 Vat Da22412ela kikayNo ratings yet
- Qualification of Class Y Flip Chip Cga Package Technology For SpaceDocument8 pagesQualification of Class Y Flip Chip Cga Package Technology For SpacePepe ChorizoNo ratings yet
- Technical Data - Tad1342veDocument9 pagesTechnical Data - Tad1342veRachid SmailiNo ratings yet
- Facts About The TudorsDocument3 pagesFacts About The TudorsRaluca MuresanNo ratings yet
- EQUIP9-Operations-Use Case ChallengeDocument6 pagesEQUIP9-Operations-Use Case ChallengeTushar ChaudhariNo ratings yet
- Unix SapDocument4 pagesUnix SapsatyavaninaiduNo ratings yet
- Actara (5 24 01) PDFDocument12 pagesActara (5 24 01) PDFBand Dvesto Plus CrepajaNo ratings yet
- Grade 7 Hazards and RisksDocument27 pagesGrade 7 Hazards and RisksPEMAR ACOSTA75% (4)
- Sip Poblacion 2019 2021 Revised Latest UpdatedDocument17 pagesSip Poblacion 2019 2021 Revised Latest UpdatedANNALLENE MARIELLE FARISCALNo ratings yet
- Paper:Introduction To Economics and Finance: Functions of Economic SystemDocument10 pagesPaper:Introduction To Economics and Finance: Functions of Economic SystemQadirNo ratings yet
- Uxc01387a PDFDocument16 pagesUxc01387a PDFmahesh123No ratings yet
- Prosocial Behaviour: Hans W. BierhoffDocument20 pagesProsocial Behaviour: Hans W. BierhoffSahil Mushaf100% (1)
- AJ IntroductionDocument31 pagesAJ IntroductiontrollergamehuydkNo ratings yet
- Northern Lights - 7 Best Places To See The Aurora Borealis in 2022Document15 pagesNorthern Lights - 7 Best Places To See The Aurora Borealis in 2022labendetNo ratings yet
- Deep Sea 500 Ats ManDocument18 pagesDeep Sea 500 Ats ManLeo Burns50% (2)
- Pharmacy System Project PlanDocument8 pagesPharmacy System Project PlankkumarNo ratings yet
- JSA FormDocument4 pagesJSA Formfinjho839No ratings yet
- Tech SharmitDocument16 pagesTech SharmitRishu SinhaNo ratings yet
- Comparison of Multi-Coil and Diaphragm Spring ClutchesDocument3 pagesComparison of Multi-Coil and Diaphragm Spring Clutchesmasb_994077No ratings yet
- Tushnet - An Essay On RightsDocument43 pagesTushnet - An Essay On RightslarisamannNo ratings yet
- PC300-8 New ModelDocument22 pagesPC300-8 New Modeljacklyn ade putra100% (2)