You might also like
- Design Iteration IncreaseDocument1 pageDesign Iteration Increasecen1510353No ratings yet
- Https Engineering - Purdue.edu UCIST TeachingModules UG Exercises Introduction To Dynamics of Structures StudentDocument15 pagesHttps Engineering - Purdue.edu UCIST TeachingModules UG Exercises Introduction To Dynamics of Structures StudentmaudgeesjedirkjeNo ratings yet
- Caltrans-Bridge Design Practice Feb 2015Document54 pagesCaltrans-Bridge Design Practice Feb 2015Zain Saeed100% (1)
- MIL STD 810G Transportation VibrationDocument15 pagesMIL STD 810G Transportation Vibrationcen1510353No ratings yet
- Stress StrainDocument11 pagesStress StraindressfeetNo ratings yet
- Acoustic TODAYDocument72 pagesAcoustic TODAYcen1510353No ratings yet
- Fatigue of StructuresDocument51 pagesFatigue of StructuresJ Guerhard GuerhardNo ratings yet
- Stress StrainDocument11 pagesStress StraindressfeetNo ratings yet
- An Introduction To The Shock Response SpectrumDocument73 pagesAn Introduction To The Shock Response SpectrumFrançois LeroyNo ratings yet
- Structural Dynamics Formulas GuideDocument18 pagesStructural Dynamics Formulas Guidetylerdurdane100% (1)
- eBook-Finite Element Procedures in Engineering Analysis-Bathe - 1982Document375 pageseBook-Finite Element Procedures in Engineering Analysis-Bathe - 1982Eugenio Ferreras100% (4)
- L&T Random Vibration Analysis and Fatigue Life Evaluation of Auxiliary Heater BracketDocument12 pagesL&T Random Vibration Analysis and Fatigue Life Evaluation of Auxiliary Heater BracketalfonxxlNo ratings yet
- A Baq Us LinkingDocument5 pagesA Baq Us Linkingcen1510353No ratings yet
- Vibration ControlDocument17 pagesVibration Controlcen1510353No ratings yet
- Kpds 2008 KasimingilizceDocument29 pagesKpds 2008 KasimingilizcestjkontNo ratings yet
- 5083 Material FatigueDocument142 pages5083 Material Fatiguecen1510353No ratings yet
- DampingDocument15 pagesDampingcen1510353No ratings yet
- Compiling Abaqus 6 - 12-1 With Inter FORTRAN 13Document3 pagesCompiling Abaqus 6 - 12-1 With Inter FORTRAN 13cen1510353No ratings yet
- DampingDocument15 pagesDampingcen1510353No ratings yet
- DampingDocument15 pagesDampingcen1510353No ratings yet
- The Vibration of Thin PlatesDocument6 pagesThe Vibration of Thin Platescen1510353No ratings yet
- Impact With Rigid Tutorial in AnsysDocument14 pagesImpact With Rigid Tutorial in AnsysSaad Al HelyNo ratings yet
- Benefits: A Bridge: The Road Is Defined As Non-Design SpaceDocument2 pagesBenefits: A Bridge: The Road Is Defined As Non-Design Spacecen1510353No ratings yet
- Implementation of V Um atDocument24 pagesImplementation of V Um attohid5562No ratings yet
- How To Interpolate Pressure Data Obtained by Other Tools Into Structure Fe Model Via Patran - v2010Document8 pagesHow To Interpolate Pressure Data Obtained by Other Tools Into Structure Fe Model Via Patran - v2010cen1510353No ratings yet
- 2D Shell Structures Analysis BibliographyDocument18 pages2D Shell Structures Analysis Bibliographycen1510353No ratings yet
- FEA Vs TestingDocument2 pagesFEA Vs Testingcen1510353100% (1)
- Benefits: A Bridge: The Road Is Defined As Non-Design SpaceDocument2 pagesBenefits: A Bridge: The Road Is Defined As Non-Design Spacecen1510353No ratings yet
- Advanced Strength and Applied ElasticityDocument280 pagesAdvanced Strength and Applied Elasticityvipulugale67% (3)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 123Document16 pages123Jj MontillaNo ratings yet
- Applied Physics LabDocument59 pagesApplied Physics LabEngr Waqas MalikNo ratings yet
- 4PH0 1P Rms 20120823 PDFDocument24 pages4PH0 1P Rms 20120823 PDFwalyatNo ratings yet
- Heat Exchanger Design CHE 311 Final Project MSUDocument15 pagesHeat Exchanger Design CHE 311 Final Project MSUnefoussiNo ratings yet
- 10 Aberration Theory Part IDocument42 pages10 Aberration Theory Part IxbNo ratings yet
- fle, Tii,:v,' Jy ' TR Ijf, Q D, 4cto'r:.,ma, Ri:al' :1j::"""Document4 pagesfle, Tii,:v,' Jy ' TR Ijf, Q D, 4cto'r:.,ma, Ri:al' :1j::"""Ovidijus RučinskasNo ratings yet
- 1 Oscillation S PreviousDocument24 pages1 Oscillation S PreviousRathankar RaoNo ratings yet
- Inertia FormulasDocument4 pagesInertia FormulasLoysa Agtarap MataNo ratings yet
- β= T T T T E T Q Q: Tutorial Sheet 5 (Document6 pagesβ= T T T T E T Q Q: Tutorial Sheet 5 (deshrajNo ratings yet
- Physics 10 Reviewer Question SheetDocument5 pagesPhysics 10 Reviewer Question SheetAntonette TabilNo ratings yet
- Power System Transmission and Security: DR Nuraddeen MagajiDocument68 pagesPower System Transmission and Security: DR Nuraddeen MagajiNuraddeen MagajiNo ratings yet
- Chapter 7 - The Superposition of Waves PDFDocument20 pagesChapter 7 - The Superposition of Waves PDFCcA BcggNo ratings yet
- smts-2 Theory of Structures by B.C. Punmia Text PDFDocument497 pagessmts-2 Theory of Structures by B.C. Punmia Text PDFAman Dubey100% (1)
- Creep Testing Kappa SSDocument2 pagesCreep Testing Kappa SSGustavo LealNo ratings yet
- Hydrodynamics of Foaming Systems in Packed TowersDocument9 pagesHydrodynamics of Foaming Systems in Packed TowersdoufethiNo ratings yet
- Density: 1. You Have A Mineral With A Volume of 15 CMDocument2 pagesDensity: 1. You Have A Mineral With A Volume of 15 CMAndrés LondoñoNo ratings yet
- Oppenheimer TranscriptDocument54 pagesOppenheimer TranscriptRatkoMRNo ratings yet
- Delhi Transco Limited Training ReportDocument61 pagesDelhi Transco Limited Training ReportDevashish Kumar33% (3)
- Thermodynamic Principles and Ideal Gas FunctionsDocument17 pagesThermodynamic Principles and Ideal Gas FunctionsLê Xuân NamNo ratings yet
- Ebook Chemistry An Atoms First Approach 2Nd Edition Zumdahl Solutions Manual Full Chapter PDFDocument62 pagesEbook Chemistry An Atoms First Approach 2Nd Edition Zumdahl Solutions Manual Full Chapter PDFthuygladys5x0100% (12)
- Chapter Problems - Constant Acceleration FormulasDocument2 pagesChapter Problems - Constant Acceleration FormulasGameMixNo ratings yet
- ECH148 UC DavisDocument5 pagesECH148 UC DavisKaul PatrickNo ratings yet
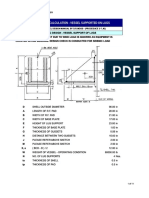
- Vessel seismic design calculationDocument11 pagesVessel seismic design calculationinnovativekarthiNo ratings yet
- Ruta Al Caos PDFDocument33 pagesRuta Al Caos PDFDiego VilchesNo ratings yet
- Handout 1Document64 pagesHandout 1Sonam AlviNo ratings yet
- Ncert Solutions Class 11 Physics Chapter 4 Motion in A Plane - 0Document37 pagesNcert Solutions Class 11 Physics Chapter 4 Motion in A Plane - 0RudraNo ratings yet
- EC8 BridgesDocument138 pagesEC8 BridgesBruno SantosNo ratings yet
- TE-2008-Chemical Pang Halimaw Na Exam Ang Hirap NG TanongSDocument40 pagesTE-2008-Chemical Pang Halimaw Na Exam Ang Hirap NG TanongSRomevie PradoNo ratings yet
- Problem Sheet 3Document2 pagesProblem Sheet 3balochfrahan.2003No ratings yet
- Terminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringDocument6 pagesTerminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringMuhammad Zaeem AkmalNo ratings yet