You might also like
- Analog Signal ConditioningDocument115 pagesAnalog Signal ConditioningAmmad Ilyas100% (1)
- Instrumentation Types and Performance CharacteristicsDocument17 pagesInstrumentation Types and Performance CharacteristicsAmmad IlyasNo ratings yet
- Turab Ali Khan Quality Through Healthcare Quality Case Study PIQCDocument10 pagesTurab Ali Khan Quality Through Healthcare Quality Case Study PIQCAmmad IlyasNo ratings yet
- Chapter 1 JunaidDocument27 pagesChapter 1 JunaidAmmad IlyasNo ratings yet
- Doing A PHD in Germany - Placement and FundingDocument2 pagesDoing A PHD in Germany - Placement and FundingatifkhushnoodNo ratings yet
- CCNA1 M1 Introduction To NetworkingDocument16 pagesCCNA1 M1 Introduction To NetworkingrockrainNo ratings yet
- Ericsson RBS 6301 For Sale From Powerstorm 4SM11261277Document2 pagesEricsson RBS 6301 For Sale From Powerstorm 4SM11261277Ammad IlyasNo ratings yet
- Ericsson RBS 6201Document2 pagesEricsson RBS 6201Yamen Nasr67% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MUJ - Hostel B8, B9 & B10Document12 pagesMUJ - Hostel B8, B9 & B10GanjaNo ratings yet
- Understanding The Harmony Information in The Preset DisplayDocument2 pagesUnderstanding The Harmony Information in The Preset DisplaymileroNo ratings yet
- Sonnax GM 6T40, 6T45, 6T50 Series Identification GuideDocument4 pagesSonnax GM 6T40, 6T45, 6T50 Series Identification GuideAlex DumasNo ratings yet
- BVA Cylinder Accessories CatalogDocument1 pageBVA Cylinder Accessories CatalogTitanplyNo ratings yet
- 132-LogSat JRC JLN-720 Instruct Manual 1-10-2019Document134 pages132-LogSat JRC JLN-720 Instruct Manual 1-10-2019Sunil S I ShippingNo ratings yet
- Fundamentals of The Automotive Cabin Climate Control SystemDocument6 pagesFundamentals of The Automotive Cabin Climate Control SystemSeddik MaarfiNo ratings yet
- Technical Summary: Semiconductor MC68HC11A8 MC68HC11A1 MC68HC11A0 8-Bit MicrocontrollersDocument45 pagesTechnical Summary: Semiconductor MC68HC11A8 MC68HC11A1 MC68HC11A0 8-Bit MicrocontrollersElias CoronelNo ratings yet
- GROUP 7 - Banksia-SD-SE-T1-Hazard-Report-Form-Template-V1.0-ID-200278Document5 pagesGROUP 7 - Banksia-SD-SE-T1-Hazard-Report-Form-Template-V1.0-ID-200278Samir Mosquera-PalominoNo ratings yet
- Data Sheet: LPG Filling Pump P-001/002/003/004/005/006Document5 pagesData Sheet: LPG Filling Pump P-001/002/003/004/005/006Denstar Ricardo Silalahi100% (1)
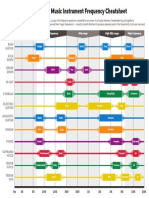
- Music Frequency Cheat SheetDocument1 pageMusic Frequency Cheat SheetLeonel Molina AlvaradoNo ratings yet
- Power Quality Intro PDFDocument32 pagesPower Quality Intro PDFsheila hariNo ratings yet
- Science 6 Week 2Document3 pagesScience 6 Week 2Ma. Jennifer MapanooNo ratings yet
- Chandrayan 2Document11 pagesChandrayan 2SELVALAKSHMI S VNo ratings yet
- SG Series NewDocument2 pagesSG Series NewSantosh ChaudharyNo ratings yet
- Composite For Innovative Wind TurbineDocument25 pagesComposite For Innovative Wind TurbineSuraj MoodNo ratings yet
- DefluoridationDocument13 pagesDefluoridationSuha Yechwad100% (1)
- Chapter 1Document65 pagesChapter 1Jad Antonios JelwanNo ratings yet
- Electrical Type Flow MetersDocument22 pagesElectrical Type Flow MetersAnuNarayan R0% (1)
- NEBB TAB Technician ProgramDocument2 pagesNEBB TAB Technician Programmoelsaied569No ratings yet
- Ground Water Recharge Techniques 2Document141 pagesGround Water Recharge Techniques 2Ravi Bhushan SharmaNo ratings yet
- SANYO UR18650A 2.2ah SpecificationsDocument18 pagesSANYO UR18650A 2.2ah SpecificationsArpit Agrawal100% (1)
- Wings of Prey ManualDocument20 pagesWings of Prey ManualRaphael DoukkaliNo ratings yet
- Ring Smart Lighting Transformer Manual ENDocument11 pagesRing Smart Lighting Transformer Manual ENjust let me download assholeNo ratings yet
- MODELS LS400/LS500: Operation and Parts ManualDocument150 pagesMODELS LS400/LS500: Operation and Parts ManualManolo CaballeroNo ratings yet
- Infineon TLE9104SH DataSheet v01 - 31 ENDocument35 pagesInfineon TLE9104SH DataSheet v01 - 31 ENMohamed AbdulmaksoudNo ratings yet
- Position: Reduced Runway Separation Minima For Night OperationsDocument2 pagesPosition: Reduced Runway Separation Minima For Night OperationsHENIGUEDRINo ratings yet
- Treybal DistDocument5 pagesTreybal DistJay CeeNo ratings yet
- Belden 9463 PDFDocument3 pagesBelden 9463 PDFtr0184No ratings yet