You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- KISSsoft Calculation Programs For Machine DesignDocument22 pagesKISSsoft Calculation Programs For Machine DesignAbhijeet DeshmukhNo ratings yet
- Dvp-Es2 Ss2 Sa2 Sx2-Program o en 20110302Document14 pagesDvp-Es2 Ss2 Sa2 Sx2-Program o en 20110302yasinNo ratings yet
- For Online Practice Exam Visit Us atDocument12 pagesFor Online Practice Exam Visit Us atscribd scribdNo ratings yet
- TRIAL STPM Mathematics M 2 (SABAH) SMK Tinggi KotaKinabaluDocument12 pagesTRIAL STPM Mathematics M 2 (SABAH) SMK Tinggi KotaKinabaluSKNo ratings yet
- 4-Problems-Balancing-Rotating MassesDocument5 pages4-Problems-Balancing-Rotating MassesvrushNo ratings yet
- Lab Test ReportDocument18 pagesLab Test ReportSumantrra ChattopadhyayNo ratings yet
- Mechanics of Solids Lab ManualDocument47 pagesMechanics of Solids Lab Manualravi03319100% (1)
- LENZE E84AVxCx - 8400 StateLine-HighLine-TopLine 0.25-45kW - v9-0 - ENDocument291 pagesLENZE E84AVxCx - 8400 StateLine-HighLine-TopLine 0.25-45kW - v9-0 - ENClaudioNo ratings yet
- Quility Geo ScicenceDocument28 pagesQuility Geo ScicenceAsfandiyar SareerNo ratings yet
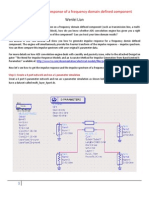
- Impulse Response of Frequency Domain ComponentDocument17 pagesImpulse Response of Frequency Domain Componentbubo28No ratings yet
- 87716166b1472fd3f7a6a47ea68960afDocument410 pages87716166b1472fd3f7a6a47ea68960afPedroNo ratings yet
- Icho1986-1994p Technical and PhysicalDocument38 pagesIcho1986-1994p Technical and PhysicalAlexandra AlgueraNo ratings yet
- Face Detection RecognitionDocument21 pagesFace Detection RecognitionkamendersinghgangwarNo ratings yet
- 1 s2.0 S1359431199000496 Main PDFDocument14 pages1 s2.0 S1359431199000496 Main PDFWILLIAMCARABALINo ratings yet
- A Process Model For EAF Steelmaking: NtroductionDocument9 pagesA Process Model For EAF Steelmaking: NtroductionacetilenNo ratings yet
- Detection of Hydrogen-Induced Cracking (HIC)Document2 pagesDetection of Hydrogen-Induced Cracking (HIC)Yetkin ErdoğanNo ratings yet
- Natural GeotextilesDocument35 pagesNatural GeotextilesSENTHIL KUMAR100% (1)
- Drmos Specifications: November 2004 Revision 1.0Document17 pagesDrmos Specifications: November 2004 Revision 1.0Tran Xuan NamNo ratings yet
- Earthquake Research and Analysis - Seismology, Seismotectonic and Earthquake GeologyDocument416 pagesEarthquake Research and Analysis - Seismology, Seismotectonic and Earthquake GeologyMiguel TorresNo ratings yet
- Finite Element Analysis of Steel CordDocument6 pagesFinite Element Analysis of Steel CordSanjiv Kumar SinghNo ratings yet
- TRD 5VDC PDFDocument2 pagesTRD 5VDC PDFGerman GodiNo ratings yet
- Rotational Dynamics: Physics 101Document10 pagesRotational Dynamics: Physics 101learningboxNo ratings yet
- Stats 100A Hw1Document2 pagesStats 100A Hw1Billy BobNo ratings yet
- PV Elite Tips and TricksDocument50 pagesPV Elite Tips and TricksHoracio Rodriguez80% (5)
- Revent Us 723 Hirez 1Document2 pagesRevent Us 723 Hirez 1Umma NakhlunNo ratings yet
- AnatoFisio VestibularDocument17 pagesAnatoFisio VestibularRocío YáñezNo ratings yet
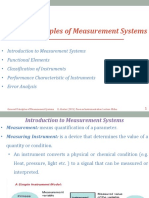
- General Principles of Measurement SystemsDocument21 pagesGeneral Principles of Measurement SystemsChelseaNo ratings yet
- The Interpretation of Incomplete Piezocone Dissipation TestsDocument358 pagesThe Interpretation of Incomplete Piezocone Dissipation Testsmaroof nahinNo ratings yet
- HPMPeikko Group 001 TMAWebDocument36 pagesHPMPeikko Group 001 TMAWebMukesh ShettyNo ratings yet
- WT Chapter 6 2Document21 pagesWT Chapter 6 2kanchanabalajiNo ratings yet