You might also like
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalFrom EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalRating: 5 out of 5 stars5/5 (4)
- Unidad 1 de Temas SelectosDocument5 pagesUnidad 1 de Temas SelectosJanet garciaNo ratings yet
- Manufactura Integrada Por Computadora (5) CoorreDocument27 pagesManufactura Integrada Por Computadora (5) Coorrealex menesesNo ratings yet
- 1MM2 Mendoza Gonzalez Felipe Practica 3Document11 pages1MM2 Mendoza Gonzalez Felipe Practica 3Felipe Mendoza GonzálezNo ratings yet
- Guà - A para Disertaciã N CIMDocument4 pagesGuà - A para Disertaciã N CIMNadia Katherina Navarrete AlcotaNo ratings yet
- Practica1 Robotica PDFDocument13 pagesPractica1 Robotica PDFHéctor Rafael Nieto López100% (1)
- Control en Posicion de Un Servomotor CC Mediante Realimentacin Del EstadoDocument29 pagesControl en Posicion de Un Servomotor CC Mediante Realimentacin Del EstadoMiguel DelgadoNo ratings yet
- Controladores Logicos Programables - Unidad 1Document142 pagesControladores Logicos Programables - Unidad 1Victor Felipe Domínguez Malo100% (1)
- Qué Es Un Sistema AutomatizadoDocument6 pagesQué Es Un Sistema AutomatizadoVictor1991200963% (8)
- 1 Complemento Primera UnidadDocument59 pages1 Complemento Primera UnidadYessica Menacho yugarNo ratings yet
- Sistema de control automático para máquina urdidora textilDocument53 pagesSistema de control automático para máquina urdidora textilCesar Augusto Resurreccion JavierNo ratings yet
- Instrumentación IndustrialDocument76 pagesInstrumentación IndustrialLeonardo Leonardo PerezNo ratings yet
- CAPITULO 2 AutomatizaciónDocument14 pagesCAPITULO 2 AutomatizaciónCarlos LopezNo ratings yet
- Proyecto de AutomatizacionDocument4 pagesProyecto de AutomatizacionDavid MartinezNo ratings yet
- Equipos y Componentes Utilizados en La Automatización de Procesos de ManufacturaDocument7 pagesEquipos y Componentes Utilizados en La Automatización de Procesos de ManufacturaFernando Olvera Ferrer100% (1)
- Bloque II SPFDocument14 pagesBloque II SPFdario gozalo minguelaNo ratings yet
- Automatizacion Industrial IntroducciónDocument8 pagesAutomatizacion Industrial IntroducciónRonald Choque JaliriNo ratings yet
- CNC MDocument6 pagesCNC MAdriano1285No ratings yet
- Automatización Industrial y Programación de PLC'sDocument57 pagesAutomatización Industrial y Programación de PLC'sS. GNo ratings yet
- Control digital PID de banda transportadoraDocument5 pagesControl digital PID de banda transportadoraCeandve Manceandve0% (1)
- Automatización de Sistemas Neumáticos e Hidráulicos Utilizando El PLCDocument5 pagesAutomatización de Sistemas Neumáticos e Hidráulicos Utilizando El PLCLuis MoralesNo ratings yet
- Centro de Mecanizado CNCDocument99 pagesCentro de Mecanizado CNCJhon CastroNo ratings yet
- Automatización RobóticaDocument11 pagesAutomatización RobóticaRaul Omar Valenzuela De La RosaNo ratings yet
- EXPOSICIONDocument19 pagesEXPOSICIONFrank C. Flores100% (1)
- Procesos de Manufactura Con CNCDocument9 pagesProcesos de Manufactura Con CNCRoberto Magaña GarciaNo ratings yet
- Ejemplo Automatización MezclaDocument26 pagesEjemplo Automatización MezclakarlitoxrNo ratings yet
- Curso de Maquinas CNC Capitulo 1Document33 pagesCurso de Maquinas CNC Capitulo 1Carlos Fredy EcheverríaNo ratings yet
- Conceptos de Robótica IndustrialDocument39 pagesConceptos de Robótica IndustrialDiego CandoNo ratings yet
- Introducción A Los PLCDocument49 pagesIntroducción A Los PLCJoseph Sedano PeralesNo ratings yet
- Sistemas de AutomatizacionDocument9 pagesSistemas de AutomatizacionJüan RojasNo ratings yet
- Procesos Secundarios U2Document10 pagesProcesos Secundarios U2Cristian BeltránNo ratings yet
- Tema 5 APLICACIONES DE LA NEUMATICA-ELECTRONICA E HIDRAULICA-ELECTRONICADocument16 pagesTema 5 APLICACIONES DE LA NEUMATICA-ELECTRONICA E HIDRAULICA-ELECTRONICAitzel perez de la cruzNo ratings yet
- Universidad Tecnica Estatal de Quevedo: Facultad de Ciencias de La Industria Y ProduccionDocument6 pagesUniversidad Tecnica Estatal de Quevedo: Facultad de Ciencias de La Industria Y Produccionltorresg3No ratings yet
- Presentación Manufactura CNC 232604Document36 pagesPresentación Manufactura CNC 232604Susy FgNo ratings yet
- ¿ Que Es Un Sistema Automatizado ?: Detectores y Captadores Accionadores y PreaccionadoresDocument29 pages¿ Que Es Un Sistema Automatizado ?: Detectores y Captadores Accionadores y PreaccionadoresAaron David Del CidNo ratings yet
- Introducción a los PLC en sistemas industrialesDocument16 pagesIntroducción a los PLC en sistemas industrialesPedro Martin Quiroz TapiaNo ratings yet
- Introducción Al Control de Maquina CNCDocument3 pagesIntroducción Al Control de Maquina CNCelpolo69No ratings yet
- Elementos Del CNCDocument3 pagesElementos Del CNCAlbert RuizNo ratings yet
- Control de posición de un motor DC con PIDDocument24 pagesControl de posición de un motor DC con PIDBennyAguirre100% (1)
- AUTOMATIZACIÓNDocument5 pagesAUTOMATIZACIÓNLoida TancaylloNo ratings yet
- Tema Estructura de Los Autómatas Programables y de Los Sistemas AutomatizadosDocument14 pagesTema Estructura de Los Autómatas Programables y de Los Sistemas AutomatizadosReynaldo Espino AltamiranoNo ratings yet
- Brazo RoboticoDocument14 pagesBrazo RoboticolordarcanoNo ratings yet
- Automatizacion ComponentesDocument41 pagesAutomatizacion ComponentesPedro Martin Llaguento PortillaNo ratings yet
- 2 Automatización Conceptos GeneralesDocument20 pages2 Automatización Conceptos GeneralesRicardo Gutierrez HdzNo ratings yet
- Control Numérico Computarizado e Impresora 3dDocument14 pagesControl Numérico Computarizado e Impresora 3dAndres PatiñoNo ratings yet
- Control PID de posición con PLCDocument15 pagesControl PID de posición con PLCJose Miguel CasadoNo ratings yet
- Equipo 4Document20 pagesEquipo 4REYNA LEONOR MORALES BALCAZARNo ratings yet
- Trabajo Final Robot Manipulador Mentor (Educacional)Document42 pagesTrabajo Final Robot Manipulador Mentor (Educacional)Gonzalo BerardoNo ratings yet
- Automatización industrial: conceptos básicosDocument28 pagesAutomatización industrial: conceptos básicosmil16No ratings yet
- Máquina CNCDocument7 pagesMáquina CNCFernando Javier FrancoNo ratings yet
- Solucion Motion, ServosDocument18 pagesSolucion Motion, ServosKevin MoralesNo ratings yet
- Elementos Básicos para La Automatizar La ProducciónDocument12 pagesElementos Básicos para La Automatizar La ProducciónErickNo ratings yet
- Sistemas HMIDocument8 pagesSistemas HMIIvan LaraNo ratings yet
- Percy Mamani Soncco Control1Document13 pagesPercy Mamani Soncco Control1Anonymous MMLzZjbyNo ratings yet
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311From EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Rating: 2 out of 5 stars2/5 (1)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109From EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109No ratings yet
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311From EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Rating: 4.5 out of 5 stars4.5/5 (2)
- Puesta en marcha de sistemas de automatización industrial. ELEM0311From EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Rating: 3 out of 5 stars3/5 (1)
- Lecciones 5 y 6. Ensamblaje y Dibujo AvanzadoDocument14 pagesLecciones 5 y 6. Ensamblaje y Dibujo AvanzadoMariangely25No ratings yet
- Matriz de Venta Ecopharma - Noviembre 2016Document41 pagesMatriz de Venta Ecopharma - Noviembre 2016Mariangely25No ratings yet
- Nominas de Evaluacion Estudiantil - Intensivo 2016Document1 pageNominas de Evaluacion Estudiantil - Intensivo 2016Mariangely25No ratings yet
- Ensamblaje 8Document3 pagesEnsamblaje 8Mariangely25No ratings yet
- Practica #3Document11 pagesPractica #3Mariangely25No ratings yet
- Análisis: Inventor Simulación Dinámica yDocument1 pageAnálisis: Inventor Simulación Dinámica yMariangely25No ratings yet
- Lecciones I y IIDocument13 pagesLecciones I y IIMariangely25No ratings yet
- Cencoex Providencia 125Document15 pagesCencoex Providencia 125Gerardo Enrique Dugarte GarridoNo ratings yet
- Análisis: Inventor Simulación Dinámica yDocument1 pageAnálisis: Inventor Simulación Dinámica yMariangely25No ratings yet
- Guia 3Document2 pagesGuia 3Mariangely25No ratings yet
- Guia 2Document2 pagesGuia 2Mariangely25No ratings yet
- Reglamentación para La Presentación de Proyectos 2012Document2 pagesReglamentación para La Presentación de Proyectos 2012Mariangely25No ratings yet
- Covenin Dib. Tec. Proyecciones 251-81Document9 pagesCovenin Dib. Tec. Proyecciones 251-81CadLiderNo ratings yet
- 4 Guardar Un Proyecto PDFDocument4 pages4 Guardar Un Proyecto PDFEitanBoriaNo ratings yet
- Plegado de PlanosDocument12 pagesPlegado de PlanosJose SiricaNo ratings yet
- 5.ejemplo de Página de Evaluación PDFDocument1 page5.ejemplo de Página de Evaluación PDFMariangely25No ratings yet
- Manual para La Elaboración Del Informe Final Proyecto Socio Integrador de Los Programas Nacionales de Formación (P.N.F.)Document20 pagesManual para La Elaboración Del Informe Final Proyecto Socio Integrador de Los Programas Nacionales de Formación (P.N.F.)Josemora1383% (6)
- CIV Cabimas 2012Document38 pagesCIV Cabimas 2012Mariangely25No ratings yet
- CronogramaDocument1 pageCronogramaMariangely25No ratings yet
- Manual de Ética Del IngenieroDocument2 pagesManual de Ética Del IngenieroPablo JoséNo ratings yet
- Manual de Ética Del IngenieroDocument2 pagesManual de Ética Del IngenieroPablo JoséNo ratings yet
- AnalisisDocument9 pagesAnalisisMary Rys Cedri AnojraNo ratings yet
- 1 La Administracion de ProyectosDocument3 pages1 La Administracion de Proyectoshrol31060No ratings yet
- Algebra de Bloques PDFDocument2 pagesAlgebra de Bloques PDFMariangely25No ratings yet
- Ejercicios de Modelado Básico en SolidWorksDocument13 pagesEjercicios de Modelado Básico en SolidWorksMariangely25No ratings yet
- Ver Codigos de Estructura de Descomposicion Del TrabajoDocument4 pagesVer Codigos de Estructura de Descomposicion Del TrabajoMariangely25No ratings yet
- Contenidos Curso SolidworksDocument3 pagesContenidos Curso SolidworksMariangely25No ratings yet
- Rmac002 Simulacion y Analisis de Piezas Con Solidworks 2012 y Catia v5Document5 pagesRmac002 Simulacion y Analisis de Piezas Con Solidworks 2012 y Catia v5Mariangely25No ratings yet
- Programación de Curso Básico-Avanzado SolidWorksDocument7 pagesProgramación de Curso Básico-Avanzado SolidWorksMariangely25No ratings yet
- Lab1 MicroprocesadorlDocument2 pagesLab1 MicroprocesadorlPaul Diaz EstradaNo ratings yet
- Fuente Segura 8Document1 pageFuente Segura 8Ramon VazquezNo ratings yet
- El Lazo de Control FeedbackDocument39 pagesEl Lazo de Control Feedbacktatiana alvarezNo ratings yet
- Arranque de Dos Motores Con Secuencia de Arranque Temporizado.Document11 pagesArranque de Dos Motores Con Secuencia de Arranque Temporizado.JMF ES LO QUE HAYNo ratings yet
- Lab 2 Operaciones Comparacion 2019 - 1Document14 pagesLab 2 Operaciones Comparacion 2019 - 1David A. ChavezNo ratings yet
- Procedimiento Trabajos ElectricosDocument16 pagesProcedimiento Trabajos ElectricosFelipe OlaveNo ratings yet
- Examen Electrotecnica Selectividad Madrid Junio 2014 EnunciadoDocument2 pagesExamen Electrotecnica Selectividad Madrid Junio 2014 EnunciadoJhunior CrespoNo ratings yet
- Ejercicios Prácticos Maquinas RotativasDocument21 pagesEjercicios Prácticos Maquinas RotativasCamilo Romero GamboaNo ratings yet
- Microcontroladores: qué son y sus principales característicasDocument13 pagesMicrocontroladores: qué son y sus principales característicasCarlos SuruyNo ratings yet
- Coordinacion de La ProteccionDocument7 pagesCoordinacion de La ProteccionDiego Amador HuaynapataNo ratings yet
- UntitledDocument10 pagesUntitledEMERSON FABIAN SANCHEZ SANDOVALNo ratings yet
- 06 Interruptores PDFDocument46 pages06 Interruptores PDFjoan75100% (2)
- Tarea TotoDocument10 pagesTarea TotoJhon VilcaNo ratings yet
- Comparativa de medios de transmisión de datosDocument3 pagesComparativa de medios de transmisión de datosPablo Fernando Ibarra PonceNo ratings yet
- Silabo DigitalesDocument5 pagesSilabo DigitalesPaul Yauri UnoccNo ratings yet
- Caso Problema Taller Eje 4Document2 pagesCaso Problema Taller Eje 4Armando CasallasNo ratings yet
- Technologies IFR18HK750Document68 pagesTechnologies IFR18HK750Juan José VelázquezNo ratings yet
- 2.-Programacion de PLC BasicoDocument14 pages2.-Programacion de PLC BasicoNelly MartinezNo ratings yet
- Trabajo Nikola Tesla, Eduard WeberDocument5 pagesTrabajo Nikola Tesla, Eduard WeberDylanss1995No ratings yet
- Flujo de Potencia PDFDocument31 pagesFlujo de Potencia PDFDavidSaulMendez100% (1)
- Equipo de Soldadura Lincoln Idealarc 250Document23 pagesEquipo de Soldadura Lincoln Idealarc 250Jose Gabriel Tortello NietoNo ratings yet
- FA8304 Then Actividad3Document5 pagesFA8304 Then Actividad3Nevetse NehtNo ratings yet
- 643P95 Ficha Tecnica Antenne GPS DCFDocument2 pages643P95 Ficha Tecnica Antenne GPS DCFOscar Domenech HernándezNo ratings yet
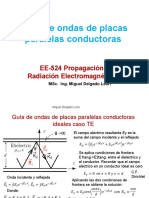
- Guia de Ondas Placas ConductorasDocument5 pagesGuia de Ondas Placas ConductorasAnonymous ACHvOgG5No ratings yet
- Banco de Preguntas de Instalaciones Civiles e IndustrialesDocument7 pagesBanco de Preguntas de Instalaciones Civiles e IndustrialesEdgarFranciscoLozadoCampoverdeNo ratings yet
- Cuaderno de Informe N°11 (SEMANA 11)Document10 pagesCuaderno de Informe N°11 (SEMANA 11)Joel Salazar LojaNo ratings yet
- Preparatorio 5-Tecnologia Electrica EPNDocument6 pagesPreparatorio 5-Tecnologia Electrica EPNFreddy Daniel ZCNo ratings yet
- Manual Instrucciones Programador de Riegos Junior Max PDFDocument12 pagesManual Instrucciones Programador de Riegos Junior Max PDFRosa Maria GarNo ratings yet
- (Teoria) RUIDO ELÉCTRICODocument12 pages(Teoria) RUIDO ELÉCTRICOLuis Alfredo MamaniNo ratings yet
- Circuitos temporizadores 555Document13 pagesCircuitos temporizadores 555Leo J Rojas RomeroNo ratings yet