You might also like
- 272 Concept Class Mansoura University DR Rev 2Document8 pages272 Concept Class Mansoura University DR Rev 2Gazzara WorldNo ratings yet
- Q.1. Explain Process, PCB and Process State Diagram. Ans. ProcessDocument16 pagesQ.1. Explain Process, PCB and Process State Diagram. Ans. ProcessAnonymous RrGVQjNo ratings yet
- QuickNET UGC NET Paper1 6000MCQs SureSuccessSeriesDocument1,530 pagesQuickNET UGC NET Paper1 6000MCQs SureSuccessSeriesmasood84% (45)
- Introduction to Computer Components and ProgrammingDocument50 pagesIntroduction to Computer Components and ProgrammingNaim EastbulletNo ratings yet
- Processes: Process Concept Process Scheduling Operation On Processes Cooperating Processes Interprocess CommunicationDocument27 pagesProcesses: Process Concept Process Scheduling Operation On Processes Cooperating Processes Interprocess CommunicationMaha IbrahimNo ratings yet
- Computer ArchitectureDocument23 pagesComputer ArchitectureVallar RussNo ratings yet
- Advanced Computer Architecture SlidesDocument105 pagesAdvanced Computer Architecture SlidesShivansh JoshiNo ratings yet
- Fall Protection ANSIDocument5 pagesFall Protection ANSIsejudavisNo ratings yet
- A Comprehensive Study On IotDocument21 pagesA Comprehensive Study On IotAman Saxena100% (1)
- Computer Architecture Notes - RanaDocument14 pagesComputer Architecture Notes - Ranarahul_singh654492550% (2)
- Pdfwatermarker PDFDocument258 pagesPdfwatermarker PDFdeepakdkhoslaNo ratings yet
- Lab Assignment 2: MIPS Single-Cycle Implementation: Electrical and Computer Engineering University of CyprusDocument23 pagesLab Assignment 2: MIPS Single-Cycle Implementation: Electrical and Computer Engineering University of CyprusNguyễn Trường Giang100% (1)
- Real Time Operating SystemsDocument35 pagesReal Time Operating SystemsNeerajBooraNo ratings yet
- COA Course Overview & Technology TrendsDocument55 pagesCOA Course Overview & Technology TrendsSanam KhanNo ratings yet
- Parallel Processing Chapter - 2: Basics of Architectural DesignDocument29 pagesParallel Processing Chapter - 2: Basics of Architectural DesignGetu GeneneNo ratings yet
- William Stallings Computer Organization and Architecture 8 Edition Computer Evolution and Performance Computer Evolution and PerformanceDocument56 pagesWilliam Stallings Computer Organization and Architecture 8 Edition Computer Evolution and Performance Computer Evolution and PerformanceAhsan Jameel100% (2)
- Principles of Operating System Questions and AnswersDocument15 pagesPrinciples of Operating System Questions and Answerskumar nikhilNo ratings yet
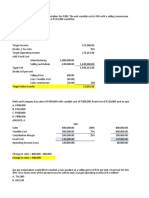
- CVP Solution (Quiz)Document9 pagesCVP Solution (Quiz)Angela Miles DizonNo ratings yet
- Computer Architecture: Knowledge Level: BasicDocument130 pagesComputer Architecture: Knowledge Level: Basicrosev15No ratings yet
- Csa Mod 2Document28 pagesCsa Mod 2anusarat100% (1)
- City Gas Distribution ReportDocument22 pagesCity Gas Distribution Reportdimple1101100% (9)
- Computer Network SyllabusDocument4 pagesComputer Network SyllabusSanjay ShresthaNo ratings yet
- Unit - 2 Central Processing Unit TOPIC 1: General Register OrganizationDocument13 pagesUnit - 2 Central Processing Unit TOPIC 1: General Register OrganizationRam Prasad GudiwadaNo ratings yet
- OPERATING SYSTEM - WordDocument16 pagesOPERATING SYSTEM - WordlinuNo ratings yet
- Embedded Systems - MSC Sem III (Final)Document162 pagesEmbedded Systems - MSC Sem III (Final)nNo ratings yet
- CH 4 - Consolidated Techniques and ProceduresDocument18 pagesCH 4 - Consolidated Techniques and ProceduresMutia WardaniNo ratings yet
- P11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyDocument45 pagesP11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyMohanty AyodhyaNo ratings yet
- Pedagogy Curriculum MCQDocument15 pagesPedagogy Curriculum MCQamit_coolbuddy20No ratings yet
- Inter-Process Communication in Linux PDFDocument25 pagesInter-Process Communication in Linux PDFVNo ratings yet
- Lab 2 ReportDocument9 pagesLab 2 Reportsherub wangdiNo ratings yet
- CH06 Memory OrganizationDocument85 pagesCH06 Memory OrganizationBiruk KassahunNo ratings yet
- CACHE MEMORY OVERVIEWDocument110 pagesCACHE MEMORY OVERVIEWArpit TripathiNo ratings yet
- Computer Bus Architecture, Pipelining and Memory ManagementDocument13 pagesComputer Bus Architecture, Pipelining and Memory ManagementniroseNo ratings yet
- Computer Network - CS610 Power Point Slides Lecture 08Document30 pagesComputer Network - CS610 Power Point Slides Lecture 08Ibrahim Choudary100% (1)
- Assignment4-Rennie RamlochanDocument7 pagesAssignment4-Rennie RamlochanRennie RamlochanNo ratings yet
- Von Neumann ArchitectureDocument4 pagesVon Neumann Architectureawais nadeemNo ratings yet
- Interprocess CommunicationDocument16 pagesInterprocess CommunicationVinuthna ReddyNo ratings yet
- CO Unit 2-1Document15 pagesCO Unit 2-1Aravinder Reddy SuramNo ratings yet
- Computer Architecture I Lecture Notes: Dr. Ali Muhtaroğlu Fall 2009 METU Northern Cyprus CampusDocument31 pagesComputer Architecture I Lecture Notes: Dr. Ali Muhtaroğlu Fall 2009 METU Northern Cyprus CampusmalkovanNo ratings yet
- Multilevel MemoriesDocument14 pagesMultilevel Memoriesprabhabathi deviNo ratings yet
- CA 2marksDocument41 pagesCA 2marksJaya ShreeNo ratings yet
- Nehalem ArchitectureDocument7 pagesNehalem ArchitectureSuchi SmitaNo ratings yet
- Why bus protocol is importantDocument4 pagesWhy bus protocol is importantashar565No ratings yet
- Introduction to Computer Systems Lecture ComponentsDocument17 pagesIntroduction to Computer Systems Lecture ComponentsDyan AngelicaNo ratings yet
- Object Oriented ProgrammingDocument72 pagesObject Oriented Programmingpraptiitm100% (1)
- Algorithm ComplexityDocument35 pagesAlgorithm ComplexityِAl TuraihiNo ratings yet
- Chapter 5Document87 pagesChapter 5supersibas11No ratings yet
- Information Storage and RetrievalDocument5 pagesInformation Storage and RetrievalHellenNdegwaNo ratings yet
- Computer Organization and ArchitectureDocument21 pagesComputer Organization and ArchitectureHebziba Jeba Rani S100% (1)
- PPT6-Phases of CompilersDocument16 pagesPPT6-Phases of Compilerschris rogersNo ratings yet
- Introduction To Embedded SystemsDocument50 pagesIntroduction To Embedded SystemsAmbika NaikNo ratings yet
- Asynchronous Data Transfer Modes of Transfer Priority Interrupt Direct Memory Access Input-Output Processor Serial CommunicationDocument49 pagesAsynchronous Data Transfer Modes of Transfer Priority Interrupt Direct Memory Access Input-Output Processor Serial CommunicationGeorgian ChailNo ratings yet
- PROCESSOR FAMILIESDocument25 pagesPROCESSOR FAMILIESAnupam Kumar Sinha100% (1)
- MP Unit-8 VtuDocument10 pagesMP Unit-8 VtuBmvpNo ratings yet
- OS Services for Programs & UsersDocument6 pagesOS Services for Programs & UsersAnil KumarNo ratings yet
- Lec08 - Instruction Sets - Characteristics and FunctionsDocument44 pagesLec08 - Instruction Sets - Characteristics and FunctionsTAN SOO CHIN0% (1)
- Dynamic Branch PredictionDocument17 pagesDynamic Branch PredictionYogendra UikeyNo ratings yet
- FinalDocument178 pagesFinalBiki JhaNo ratings yet
- Instruction pipelining explainedDocument5 pagesInstruction pipelining explainedAyush KumarNo ratings yet
- Operating System PDFDocument43 pagesOperating System PDFTejas RaneNo ratings yet
- SMT and CMP ArchitecturesDocument19 pagesSMT and CMP ArchitecturesChippyVijayanNo ratings yet
- Topic - 1 - Characterization of Distributed SystemsDocument53 pagesTopic - 1 - Characterization of Distributed SystemsAhmad Nazri IbrahimNo ratings yet
- L01 - Basics of Structured ProgrammingDocument35 pagesL01 - Basics of Structured ProgrammingMohammad Anisur Rahaman100% (2)
- COA Module 2 NotesDocument46 pagesCOA Module 2 NotesAssini HussainNo ratings yet
- Processor and Memory OrganizationDocument17 pagesProcessor and Memory OrganizationVenkatavijay YarlagaddaNo ratings yet
- Working Set Model & LocalityDocument15 pagesWorking Set Model & LocalitySunimali PereraNo ratings yet
- Quiz Chapter 4 CPUDocument3 pagesQuiz Chapter 4 CPUAnthony PistonNo ratings yet
- Real Time Operating System A Complete Guide - 2020 EditionFrom EverandReal Time Operating System A Complete Guide - 2020 EditionNo ratings yet
- Written + Interview Marks for TGT (P&HE) PostDocument27 pagesWritten + Interview Marks for TGT (P&HE) PostsambhudharmadevanNo ratings yet
- Tycs Sem Vi QB PDFDocument29 pagesTycs Sem Vi QB PDFamit_coolbuddy20No ratings yet
- Tycs Sem Vi QB PDFDocument29 pagesTycs Sem Vi QB PDFamit_coolbuddy20No ratings yet
- Recent Advances in MAC Protocols For The Energy Harvesting Based WSN: A Comprehensive ReviewDocument18 pagesRecent Advances in MAC Protocols For The Energy Harvesting Based WSN: A Comprehensive ReviewPardeep TurNo ratings yet
- VC NO 07-09 - 20 MGR AM IT Contractual AD PDFDocument9 pagesVC NO 07-09 - 20 MGR AM IT Contractual AD PDFamit_coolbuddy20No ratings yet
- STTP On Machine LearningDocument4 pagesSTTP On Machine Learningamit_coolbuddy20No ratings yet
- Assistant Professor Teaching Posts-FINALDocument10 pagesAssistant Professor Teaching Posts-FINALKirankumar MutnaliNo ratings yet
- NIT Raipur PHD 2019Document33 pagesNIT Raipur PHD 2019amit_coolbuddy20No ratings yet
- WWW - Nitdelhi.ac - In: (An Autonomous Institute Under The Aegis of Ministry of HRD, Govt. of India)Document10 pagesWWW - Nitdelhi.ac - In: (An Autonomous Institute Under The Aegis of Ministry of HRD, Govt. of India)pavannotinNo ratings yet
- Pgdca SyllabusDocument13 pagesPgdca SyllabusDeepak SolankiNo ratings yet
- Energies 11 02219Document16 pagesEnergies 11 02219amit_coolbuddy20No ratings yet
- Revision of PHD Fellowship & ReimbursementDocument1 pageRevision of PHD Fellowship & Reimbursementamit_coolbuddy20No ratings yet
- Introduction To Statistical Quality Control, 4 Edition: Douglas C. MontgomeryDocument28 pagesIntroduction To Statistical Quality Control, 4 Edition: Douglas C. Montgomerynitishbansal89No ratings yet
- AICTE Degree Pay, Qualifications and PromotionsDocument49 pagesAICTE Degree Pay, Qualifications and PromotionsM S R RajuNo ratings yet
- MCRPSSV Bscit PDFDocument23 pagesMCRPSSV Bscit PDFamit_coolbuddy20No ratings yet
- UGC Approved Journal ListDocument68 pagesUGC Approved Journal Listamit_coolbuddy20No ratings yet
- MCRPSSV Bscit PDFDocument23 pagesMCRPSSV Bscit PDFamit_coolbuddy20No ratings yet
- Upsssc Yuva Kalyan Adhikari Syllabus 2018Document3 pagesUpsssc Yuva Kalyan Adhikari Syllabus 2018amit_coolbuddy20No ratings yet
- Detailed Syllabus: Bachelor of Computer Applications (BCA)Document37 pagesDetailed Syllabus: Bachelor of Computer Applications (BCA)Vikram SinghNo ratings yet
- Syllabous BCA - NewDocument26 pagesSyllabous BCA - Newamit_coolbuddy20No ratings yet
- B.Sc. I: Paper I: Algebra and TrigonometryDocument1 pageB.Sc. I: Paper I: Algebra and Trigonometryamit_coolbuddy20No ratings yet
- Dr. APJ Abdul Kalam Technical University Uttar Pradesh, Lucknow - 226031Document1 pageDr. APJ Abdul Kalam Technical University Uttar Pradesh, Lucknow - 226031amit_coolbuddy20No ratings yet
- VB IDE BASICSDocument19 pagesVB IDE BASICSamit_coolbuddy20No ratings yet
- KVS Exam Scheme 2018Document2 pagesKVS Exam Scheme 2018amit_coolbuddy20No ratings yet
- Important InstructionsDocument4 pagesImportant Instructionsamit_coolbuddy20No ratings yet
- Computer Science Ret Bhu 2016Document24 pagesComputer Science Ret Bhu 2016amit_coolbuddy20No ratings yet
- Java Point: HashtableDocument2 pagesJava Point: Hashtableamit_coolbuddy20No ratings yet
- Ds Short LecturesDocument53 pagesDs Short Lecturesamit_coolbuddy20No ratings yet
- Structures Module 3 Notes FullDocument273 pagesStructures Module 3 Notes Fulljohnmunjuga50No ratings yet
- Presentation of The LordDocument1 pagePresentation of The LordSarah JonesNo ratings yet
- Lirik and Chord LaguDocument5 pagesLirik and Chord LaguRyan D'Stranger UchihaNo ratings yet
- De Thi Thu THPT Quoc Gia Mon Tieng Anh Truong THPT Hai An Hai Phong Nam 2015Document10 pagesDe Thi Thu THPT Quoc Gia Mon Tieng Anh Truong THPT Hai An Hai Phong Nam 2015nguyen ngaNo ratings yet
- 04 Activity 2Document2 pages04 Activity 2Jhon arvie MalipolNo ratings yet
- Role Played by Digitalization During Pandemic: A Journey of Digital India Via Digital PaymentDocument11 pagesRole Played by Digitalization During Pandemic: A Journey of Digital India Via Digital PaymentIAEME PublicationNo ratings yet
- Pass Issuance Receipt: Now You Can Also Buy This Pass On Paytm AppDocument1 pagePass Issuance Receipt: Now You Can Also Buy This Pass On Paytm AppAnoop SharmaNo ratings yet
- Specialized Government BanksDocument5 pagesSpecialized Government BanksCarazelli AysonNo ratings yet
- WM3000U - WM3000 I: Measuring Bridges For Voltage Transformers and Current TransformersDocument4 pagesWM3000U - WM3000 I: Measuring Bridges For Voltage Transformers and Current TransformersEdgar JimenezNo ratings yet
- AssDocument9 pagesAssJane SalvanNo ratings yet
- PNW 0605Document12 pagesPNW 0605sunf496No ratings yet
- Warranty Information Emea and CisDocument84 pagesWarranty Information Emea and CisHenriques BrunoNo ratings yet
- Entrepreneurship and EconomicDocument2 pagesEntrepreneurship and EconomicSukruti BajajNo ratings yet
- TicketDocument2 pagesTicketbikram kumarNo ratings yet
- Cantilever Retaining Wall AnalysisDocument7 pagesCantilever Retaining Wall AnalysisChub BokingoNo ratings yet
- Best Homeopathic Doctor in SydneyDocument8 pagesBest Homeopathic Doctor in SydneyRC homeopathyNo ratings yet
- Harry Styles: The Rise of a Pop StarDocument9 pagesHarry Styles: The Rise of a Pop StarBilqis LaudyaNo ratings yet
- BC Specialty Foods DirectoryDocument249 pagesBC Specialty Foods Directoryjcl_da_costa6894No ratings yet
- How To Make Pcbat Home PDFDocument15 pagesHow To Make Pcbat Home PDFamareshwarNo ratings yet
- Top Machine Learning ToolsDocument9 pagesTop Machine Learning ToolsMaria LavanyaNo ratings yet
- Admission Checklist (Pre-) Master September 2021Document7 pagesAdmission Checklist (Pre-) Master September 2021Máté HirschNo ratings yet
- Whats The Average 100 M Time For An Olympics - Google SearchDocument1 pageWhats The Average 100 M Time For An Olympics - Google SearchMalaya KnightonNo ratings yet
- Lenex 3.0 Technical DocumentationDocument31 pagesLenex 3.0 Technical DocumentationGalina DNo ratings yet